Robot control. Devika Subramanian Fall 2008 Comp 140
|
|
|
- Lesley Carroll
- 6 years ago
- Views:
Transcription
1 Robot control Devika Subramanian Fall 2008 Comp 140 1




2 Robots 2

3 The sense-decide-act cycle World Actuators Sensors 3
4 Sensors for mobile robots Contact sensors bumpers Internal sensors accelerometers gyroscopes compasses Proximity sensors sonars infra-red laser range finders Visual sensors: cameras Satellite-based sensors: GPS 4

5 Sonars 40kHz sonar range finders 16 cm to 600 cm range Ultrasonic SRF02 has the tech specs has a cool FAQ on sonars 5


6 How sonars work 6

7 Sonar characteristics 7

8 Sonar characteristics 8
9 Sonar characteristics Seattle Robotics Club 9


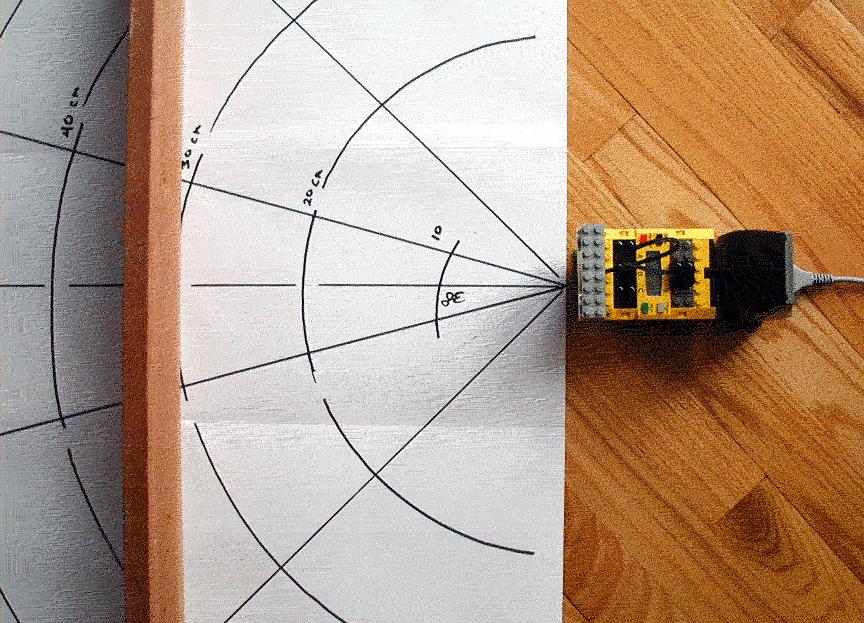
10 Building sensor models d cm 20cm 30cm 40cm 50cm degree of inclination 10

11 Compass degrees (0-360) 0: north 90: west 180: south 270: east Measurements in deci-degrees 4 significant digits in reading West North 0/ South East
12 Robot actuators turn motors command a turn in degrees per second forward/reverse motors command forward or backward motion in cm/ sec 12
13 Programming embedded systems Embedded systems interact with the external world, sense it, and take actions to change their world. As the system computes, the world underneath it is changing. Embedded systems work in a sensedecide-act loop. 13
14 The inadequacy of fixed plans In the maze world shown in the Markov decision processes example move north by 2 move east by 3.. is not a robust plan! world responds in a stochastic way to robot s actions Yet, it is possible for the robot to succeed in the maze world with a policy that gets it to the goal state while avoiding the trap state. 14
15 The sense-decide-act cycle get information from sensors perform computation to interpret sensors, and to determine the next action take computed action A reactive system responds to current sensors. It estimates what to do based on current state. 15
16 Get robot to within 50 cm of wall Perfect actuation/sensing Let d = current distance to wall (in cm) move(d-50) open loop control 16
17 Get robot to within 50 cm of wall Imperfect actuation/perfect sensing sense act Let d = current distance to wall (in cm) while d > 50: move(1) closed loop control Is this program guaranteed to succeed? 17
18 Uncertainty in sensing and actuation while distance > threshold-distance: move(1) Have robot creep up to desired distance slowly allows for dynamical changes in world (appearance of a sudden obstacle) allows for less than perfect actuation 18
19 Proportional control Instead of moving by a fixed amount each time, move proportional to the remaining distance Let d = current distance to wall (in cm) while d > 50: move(k*(d-50)) 19
20 Get robot to within 50 cm of wall Imperfect actuation/imperfect sensing sense act Let d = current distance to wall (in cm) while Pr(d > 50)>epsilon: move(k*(d-50)) closed loop control Is this program guaranteed to succeed? 20
21 State machines State machines are a way of constructing embedded systems with state (i.e., that remember their past) initial state next state function: map input and state to next state(s) output function: map input and state to output 21
22 Duncan hall entry machine S = {open,closed} # the states I = {swipe-card,pull-door} # the inputs O = {click,none} # the outputs swipe-card closed open pull-door 22
23 Specification of Duncan Hall entry machine next: states x input --> state next(closed,swipe-card) = open next(open,pull-door) = closed next(s,i) = s for all other s,i combinations output: states x input --> state output(closed,swipe-card) = click output(open,pull-door) = click output(s,i) = None for all other s,i combinations 23
24 A squirrel bot d = too_far d = too_close content d=just_right d=just_right curious d = too_close scared d = too_far Each state has an associated behavior. Curious -- approach object slowly Scared -- back away quickly Content -- do nothing 24
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
Homework 10: Patent Liability Analysis
 Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics
 A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics Part Three: how sensors and actuators work and how to hook them up to a microcontroller There are gazillions of different
A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics Part Three: how sensors and actuators work and how to hook them up to a microcontroller There are gazillions of different
Devantech SRF04 Ultra-Sonic Ranger Finder Cornerstone Electronics Technology and Robotics II
 Devantech SRF04 Ultra-Sonic Ranger Finder Cornerstone Electronics Technology and Robotics II Administration: o Prayer PicBasic Pro Programs Used in This Lesson: o General PicBasic Pro Program Listing:
Devantech SRF04 Ultra-Sonic Ranger Finder Cornerstone Electronics Technology and Robotics II Administration: o Prayer PicBasic Pro Programs Used in This Lesson: o General PicBasic Pro Program Listing:
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
Revision for Grade 7 in Unit #1&3
 Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it
 MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
TETRIX PULSE Workshop Guide
 TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
Embedding Radars in Robots for Safety and Obstacle Detection
 Technical Disclosure Commons Defensive Publications Series April 02, 2017 Embedding Radars in Robots for Safety and Obstacle Detection Jaime Lien Patrick M. Amihood Ali Javan Javidan Mustafa Emre Karagozler
Technical Disclosure Commons Defensive Publications Series April 02, 2017 Embedding Radars in Robots for Safety and Obstacle Detection Jaime Lien Patrick M. Amihood Ali Javan Javidan Mustafa Emre Karagozler
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Electronics II. Calibration and Curve Fitting
 Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors. CS Embedded Systems p. 1/1
 CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
Today s Menu. Near Infrared Sensors
 Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Initial Report on Wheelesley: A Robotic Wheelchair System
 Initial Report on Wheelesley: A Robotic Wheelchair System Holly A. Yanco *, Anna Hazel, Alison Peacock, Suzanna Smith, and Harriet Wintermute Department of Computer Science Wellesley College Wellesley,
Initial Report on Wheelesley: A Robotic Wheelchair System Holly A. Yanco *, Anna Hazel, Alison Peacock, Suzanna Smith, and Harriet Wintermute Department of Computer Science Wellesley College Wellesley,
Sponsored by. Nisarg Kothari Carnegie Mellon University April 26, 2011
 Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors
 Activity 1 - Reading Sensors A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors Computer Science Unit This tutorial teaches how to read values from sensors in the mblock IDE.
Activity 1 - Reading Sensors A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors Computer Science Unit This tutorial teaches how to read values from sensors in the mblock IDE.
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Robot Control. Robot Control
 Robot Control Introduction There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Robot Control Introduction There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Machine Intelligence Laboratory
 Introduction Robot Control There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Introduction Robot Control There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
OBSTACLE EVADING ULTRASONIC ROBOT. Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin
 OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
POKER BOT. Justin McIntire EEL5666 IMDL. Dr. Schwartz and Dr. Arroyo
 POKER BOT Justin McIntire EEL5666 IMDL Dr. Schwartz and Dr. Arroyo Table of Contents: Introduction.page 3 Platform...page 4 Function...page 4 Sensors... page 6 Circuits....page 8 Behaviors...page 9 Problems
POKER BOT Justin McIntire EEL5666 IMDL Dr. Schwartz and Dr. Arroyo Table of Contents: Introduction.page 3 Platform...page 4 Function...page 4 Sensors... page 6 Circuits....page 8 Behaviors...page 9 Problems
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here:
 Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Open the Tech Toys Scratch project. Your club leader will give you a copy of this project, or you can open it online at jumpto.cc/toys-go.
 Tech Toys Introduction In this project you ll learn how to code your own tech toys! Click the bow tie to see it spin; Click the sunglasses to see them change colour; Click the laptop to power up the helicopter;
Tech Toys Introduction In this project you ll learn how to code your own tech toys! Click the bow tie to see it spin; Click the sunglasses to see them change colour; Click the laptop to power up the helicopter;
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
1 of 5 01/04/
 1 of 5 01/04/2004 2.02 &KXFN\SXWWLQJLWDOOWRJHWKHU :KRV&KXFN\WKHQ" is our test robot. He grown and evolved over the years as we ve hacked him around to test new modules. is ever changing, and this is a
1 of 5 01/04/2004 2.02 &KXFN\SXWWLQJLWDOOWRJHWKHU :KRV&KXFN\WKHQ" is our test robot. He grown and evolved over the years as we ve hacked him around to test new modules. is ever changing, and this is a
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Sensor Data Fusion Using Kalman Filter
 Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Morse Code Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Learning Focus.
 Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Sten BOT Robot Kit 1 Stensat Group LLC, Copyright 2016
 StenBOT Robot Kit Stensat Group LLC, Copyright 2016 1 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
StenBOT Robot Kit Stensat Group LLC, Copyright 2016 1 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE. G. Pires, U. Nunes, A. T. de Almeida
 ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE G. Pires, U. Nunes, A. T. de Almeida Institute of Systems and Robotics Department of Electrical Engineering University of Coimbra, Polo II 3030
ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE G. Pires, U. Nunes, A. T. de Almeida Institute of Systems and Robotics Department of Electrical Engineering University of Coimbra, Polo II 3030
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Session 11 Introduction to Robotics and Programming mbot. >_ {Code4Loop}; Roochir Purani
 Session 11 Introduction to Robotics and Programming mbot >_ {Code4Loop}; Roochir Purani RECAP from last 2 sessions 3D Programming with Events and Messages Homework Review /Questions Understanding 3D Programming
Session 11 Introduction to Robotics and Programming mbot >_ {Code4Loop}; Roochir Purani RECAP from last 2 sessions 3D Programming with Events and Messages Homework Review /Questions Understanding 3D Programming
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School
 Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY
 DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY Yutaro Fukase fukase@shimz.co.jp Hitoshi Satoh hitoshi_sato@shimz.co.jp Keigo Takeuchi Intelligent Space Project takeuchikeigo@shimz.co.jp Hiroshi
DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY Yutaro Fukase fukase@shimz.co.jp Hitoshi Satoh hitoshi_sato@shimz.co.jp Keigo Takeuchi Intelligent Space Project takeuchikeigo@shimz.co.jp Hiroshi
Robotics Engineering DoDEA Career Technology Education Robot Programming
 Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Introduction to Robotics Rubrics
 Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Fuzzy Logic Based Robot Navigation In Uncertain Environments By Multisensor Integration
 Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MF1 94) Las Vega, NV Oct. 2-5, 1994 Fuzzy Logic Based Robot Navigation In Uncertain
Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MF1 94) Las Vega, NV Oct. 2-5, 1994 Fuzzy Logic Based Robot Navigation In Uncertain
2.4 Sensorized robots
 66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
Critical Design Review: M.A.D. Dog. Nicholas Maddy Timothy Dayley Kevin Liou
 Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Mars Rover: System Block Diagram. November 19, By: Dan Dunn Colin Shea Eric Spiller. Advisors: Dr. Huggins Dr. Malinowski Mr.
 Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
The project. General challenges and problems. Our subjects. The attachment and locomotion system
 The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes
The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes
INTERNATIONAL JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY (IJEET) TWO WHEELED SELF BALANCING ROBOT FOR AUTONOMOUS NAVIGATION
 TWO WHEELED SELF BALANCING ROBOT FOR AUTONOMOUS NAVIGATION") INTERNATIONAL JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY (IJEET) International Journal of Electrical Engineering and Technology (IJEET), ISSN 0976 6545(Print), ISSN 0976 6545(Print) ISSN 0976 6553(Online)
INTERNATIONAL JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY (IJEET) International Journal of Electrical Engineering and Technology (IJEET), ISSN 0976 6545(Print), ISSN 0976 6545(Print) ISSN 0976 6553(Online)
C - Underground Exploration
 C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input
 IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world.
 Activity 3.1.1 Inputs and Outputs for CT Introduction Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive
Activity 3.1.1 Inputs and Outputs for CT Introduction Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
INSTANT ROBOT SHIELD (AXE408)
") INSTANT ROBOT SHIELD (AXE408) 1.0 Introduction Thank you for purchasing this Instant Robot shield. This datasheet is designed to give a brief introduction to how the shield is assembled, used and configured.
INSTANT ROBOT SHIELD (AXE408) 1.0 Introduction Thank you for purchasing this Instant Robot shield. This datasheet is designed to give a brief introduction to how the shield is assembled, used and configured.
Developing Applications for the ROBOBO! robot
 Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
istand I can Stand SPECIAL SENSOR REPORT
 istand I can Stand SPECIAL SENSOR REPORT SUBRAT NAYAK UFID: 5095-9761 For EEL 5666 - Intelligent Machines Design Laboratory (Spring 2008) Department of Electrical and Computer Engineering University of
istand I can Stand SPECIAL SENSOR REPORT SUBRAT NAYAK UFID: 5095-9761 For EEL 5666 - Intelligent Machines Design Laboratory (Spring 2008) Department of Electrical and Computer Engineering University of
EQ-ROBO Programming : bomb Remover Robot
 EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
Agent-based/Robotics Programming Lab II
 cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
SRF05-HY - Ultra-Sonic Ranger Technical Specification
 SRF05-HY - Ultra-Sonic Ranger Technical Specification Introduction The SRF05-HY is an evolutionary step from the SRF04-HY, and has been designed to increase flexibility, increase range, and to reduce costs
SRF05-HY - Ultra-Sonic Ranger Technical Specification Introduction The SRF05-HY is an evolutionary step from the SRF04-HY, and has been designed to increase flexibility, increase range, and to reduce costs
INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
 Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception
 Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Baxter Safety and Compliance Overview
 Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
HCI for Real world Applications
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661, p- ISSN: 2278-8727Volume 11, Issue 1 (May. - Jun. 2013), PP 70-74 HCI for Real world Applications Sreeji C, Vineetha G R, Amina Beevi
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661, p- ISSN: 2278-8727Volume 11, Issue 1 (May. - Jun. 2013), PP 70-74 HCI for Real world Applications Sreeji C, Vineetha G R, Amina Beevi
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS. Bruce Turner Intelligent Machine Design Lab Summer 1999
 GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be