Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
|
|
|
- Quentin McKinney
- 5 years ago
- Views:
Transcription


1
2 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful?
3 How do you evaluate different sensors?
4
5 Classification of Sensors Proprioceptive sensors measure values internally to the system (robot), e.g. motor speed, wheel load, heading of the robot, battery status Exteroceptive sensors information from the robots environment distances to objects, intensity of the ambient light, unique features. Passive sensors energy coming for the environment Active sensors emit their proper energy and measure the reaction better performance, but some influence on envrionment
6 Characterizing Sensor Performance (1) Measurement in real world environment is error prone Basic sensor response ratings Dynamic range ratio between lower and upper limits, usually in decibels (db, power) e.g. power measurement from 1 Milliwatt to 20 Watts e.g. voltage measurement from 1 Millivolt to 20 Volt 20 instead of 10 because square of voltage is equal to power Range upper limit
7 Characterizing Sensor Performance (2) Basic sensor response ratings (cont.) Resolution minimum difference between two values usually: lower limit of dynamic range = resolution for digital sensors it is usually the analog-to-digital conversion e.g. 5V / 255 (8 bit) Linearity variation of output signal as function of the input signal linearity is less important when signal is after treated with a computer Bandwidth or Frequency the speed with which a sensor can provide a stream of readings usually there is an upper limit depending on the sensor and the sampling rate Lower limit is also possible, e.g. acceleration sensor
8 In Situ Sensor Performance (1) Sensitivity ratio of output change to input change however, in real world environment, the sensor has very often high sensitivity to other environmental changes, e.g. illumination Cross-sensitivity sensitivity to environmental parameters that are orthogonal to the target parameters (e.g., compass responding to building materials) Error / Accuracy difference between the sensor s output and the true value error m = measured value v = true value
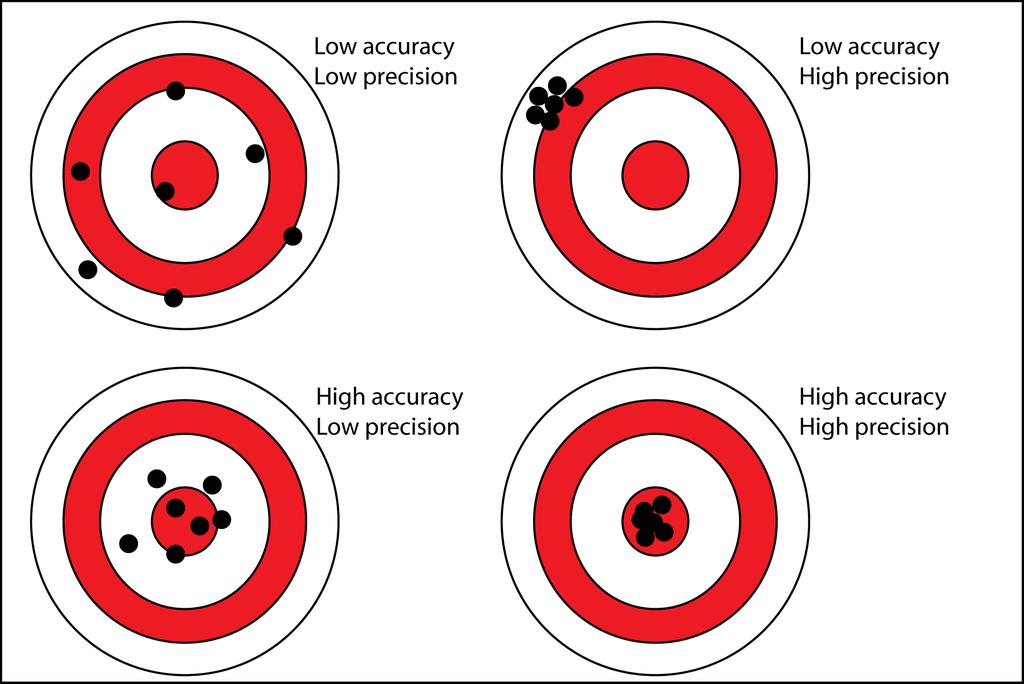
9 In Situ Sensor Performance (2) Characteristics that are especially relevant for real world environments Systematic error deterministic errors caused by factors that can (in theory) be modeled prediction Random error non-deterministic no prediction possible however, they can be described probabilistically Precision reproducibility of sensor results
10 Characterizing Error: Challenges in Mobile Robotics Mobile Robot: perceive, analyze and interpret state Measurements are dynamically changing and error prone Examples: changing illuminations specular reflections light or sound absorbing surfaces cross-sensitivity of robot sensor to robot pose and robotenvironment dynamics rarely possible to model appear as random errors systematic errors and random errors may be well defined in controlled environment
11 Multi-Modal Error Distributions Behavior of sensors modeled by probability distribution (random errors) usually very little knowledge about causes of random errors often probability distribution is assumed to be symmetric or even Gaussian however, may be very wrong. Sonar (ultrasonic) sensor might overestimate the distance in real environment and is therefore not symmetric Sonar sensor might be best modeled by two modes: 1. the case that the signal returns directly 2. the case that the signals returns after multi-path reflections Stereo vision system might correlate to images incorrectly, thus causing results that make no sense at all
12 Wheel / Motor Encoders (1) measure position or speed of the wheels Integrate wheel movements to get an estimate of robots position odometry optical encoders are proprioceptive sensors position estimation in relation to a fixed reference frame is only valuable for short movements typical resolutions: 2000 increments per revolution.
13 Wheel / Motor Encoders (2) Ok, how does this work? Speed? Position?

")
14 Wheel / Motor Encoders (2)

15 Wheel / Motor Encoders (3)
 Location + Orientation =")
16 Heading Sensors Proprioceptive (gyroscope, inclinometer) or Exteroceptive (compass) Determine the robot s orientation Heading + velocity integrates to position estimate Dead reckoning (ships) Location + Orientation = Pose
17 ~2000 B.C. Compass Chinese suspended a piece of naturally magnetite from a silk thread and used it to guide a chariot over land Magnetic field on earth absolute measure for orientation Large variety of solutions to measure the earth magnetic field Major drawbacks weakness of the earth field easily disturbed by magnetic objects or other sources not feasible for indoor environments

18 Gyrocompass Patented in 1885 Practical in 1906 (Germany) Find true north as determined by Earth s rotation Not affected by ship s composition, variety in magnetic field, etc.

19 Gyroscope Heading sensors keep the orientation to a fixed frame absolute measure for the heading of mobile system Mechanical Gyroscopes Drift: 0.1 in 6 hours Spinning axis is aligned with north-south meridian, earth s rotation has no effect on gyro s horizontal axis If points east-west, horizontal axis reads the earth rotation Optical Gyroscopes (1980s) 2 laser beams in opposite direction around circle Bandwidth >100 khz Resolution < degrees/hr
20 Optical Gyroscopes Early 1980: first installed in airplanes Angular speed (heading) sensors using two monochromic light / laser beams from same source On is traveling clockwise, the other counterclockwise Laser beam traveling in direction of rotation slightly shorter path -> shows a higher frequency difference in frequency Df of the two beams is proportional to the angular velocity W of the cylinder New solid-state optical gyroscopes based on the same principle are build using microfabrication technology MUCH more accurate than mechanical
21 Ground-Based Active and Passive Beacons Beacons are signaling guiding devices with a precisely known positions Beacon-base navigation is used since the humans started to travel Natural beacons (landmarks) like stars, mountains, or the sun Artificial beacons like lighthouses Global Positioning System revolutionized modern navigation technology key sensor for outdoor mobile robotics GPS not applicable indoors Major drawback with the use of beacons in indoor: Beacons require environment changes: costly Limit flexibility and adaptability to changing environments Key design choice in Robocup
22 Global Positioning System (GPS) (1) Developed for military use, now commercial 24 satellites (including some spares) Orbit earth every 12 hours at a height of km Location of GPS receiver determined through time of flight measurement Technical challenges: Time synchronization between individual satellites and GPS receiver Real time update of the exact location of the satellites Precise measurement of the time of flight Interferences with other signals
23 Global Positioning System (GPS) (2) How many satellites do you need to see?
 position accuracy proportional to precision of time measurement Real time update of exact location of satellites: Monitoring satellites from a number of widely distributed ground")
24 Global Positioning System (GPS) (3) Time synchronization: atomic clocks on each satellite, monitored from different ground stations electromagnetic radiation propagates at light speed (0.3 m / nanosecond) position accuracy proportional to precision of time measurement Real time update of exact location of satellites: Monitoring satellites from a number of widely distributed ground stations master station analyses all measurements & transmits actual position to each satellite Exact measurement of the time of flight: quartz clock on the GPS receivers are not very precise four satellite allows identification of position values (x, y, z) and clock correction ΔT Position accuracies down to a ~2 meters Improvement: Differential GPS ~10cm Need fixed, known location Piski: Project possibilities here!
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
MEM380 Applied Autonomous Robots I Fall Introduction to Sensors & Perception
 MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems
 Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
Localization. of mobile devices. Seminar: Mobile Computing. IFW C42 Tuesday, 29th May 2001 Roger Zimmermann
 Localization of mobile devices Seminar: Mobile Computing IFW C42 Tuesday, 29th May 2001 Roger Zimmermann Overview Introduction Why Technologies Absolute Positioning Relative Positioning Selected Systems
Localization of mobile devices Seminar: Mobile Computing IFW C42 Tuesday, 29th May 2001 Roger Zimmermann Overview Introduction Why Technologies Absolute Positioning Relative Positioning Selected Systems
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Design Project Introduction DE2-based SecurityBot
 Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Lecture: Sensors , Fall 2008
 All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Chapter 1 Introduction
 Wireless Information Transmission System Lab. Chapter 1 Introduction National Sun Yat-sen University Table of Contents Elements of a Digital Communication System Communication Channels and Their Wire-line
Wireless Information Transmission System Lab. Chapter 1 Introduction National Sun Yat-sen University Table of Contents Elements of a Digital Communication System Communication Channels and Their Wire-line
ANNUAL OF NAVIGATION 16/2010
 ANNUAL OF NAVIGATION 16/2010 STANISŁAW KONATOWSKI, MARCIN DĄBROWSKI, ANDRZEJ PIENIĘŻNY Military University of Technology VEHICLE POSITIONING SYSTEM BASED ON GPS AND AUTONOMIC SENSORS ABSTRACT In many real
ANNUAL OF NAVIGATION 16/2010 STANISŁAW KONATOWSKI, MARCIN DĄBROWSKI, ANDRZEJ PIENIĘŻNY Military University of Technology VEHICLE POSITIONING SYSTEM BASED ON GPS AND AUTONOMIC SENSORS ABSTRACT In many real
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
GLOBAL POSITIONING SYSTEMS. Knowing where and when
 GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Technician Licensing Class
 Technician Licensing Class Talk to Outer Presented Space by Amateur Radio Technician Class Element 2 Course Presentation ELEMENT 2 SUB-ELEMENTS (Groupings) About Ham Radio Call Signs Control Mind the Rules
Technician Licensing Class Talk to Outer Presented Space by Amateur Radio Technician Class Element 2 Course Presentation ELEMENT 2 SUB-ELEMENTS (Groupings) About Ham Radio Call Signs Control Mind the Rules
RPLIDAR A3. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A3M1. Shanghai Slamtec.Co.,Ltd rev.1.
 www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
Satellite Sub-systems
 Satellite Sub-systems Although the main purpose of communication satellites is to provide communication services, meaning that the communication sub-system is the most important sub-system of a communication
Satellite Sub-systems Although the main purpose of communication satellites is to provide communication services, meaning that the communication sub-system is the most important sub-system of a communication
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Homework 10: Patent Liability Analysis
 Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Signals, Instruments, and Systems W7. Embedded Systems General Concepts and
 Signals, Instruments, and Systems W7 Introduction to Hardware in Embedded Systems General Concepts and the e-puck Example Outline General concepts: autonomy, perception, p action, computation, communication
Signals, Instruments, and Systems W7 Introduction to Hardware in Embedded Systems General Concepts and the e-puck Example Outline General concepts: autonomy, perception, p action, computation, communication
CHAPTER 8 ANTENNAS 1
 CHAPTER 8 ANTENNAS 1 2 Antennas A good antenna works A bad antenna is a waste of time & money Antenna systems can be very inexpensive and simple They can also be very expensive 3 Antenna Considerations
CHAPTER 8 ANTENNAS 1 2 Antennas A good antenna works A bad antenna is a waste of time & money Antenna systems can be very inexpensive and simple They can also be very expensive 3 Antenna Considerations
RPLIDAR A2. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A2M5 A2M6 OPTMAG. Shanghai Slamtec.Co.,Ltd rev.1.
 2016-10-28 rev.1.0 RPLIDAR A2 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M5 A2M6 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
2016-10-28 rev.1.0 RPLIDAR A2 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M5 A2M6 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
Ultrasonic Level Transducer Type: MPUL06 Article No.: ca. 122
 Type: Article No.: 0067720.006 Dimensions ø95 PG7 45.25 16 101 ca. 122 ø53 NPS 2" Figure 1: Ultrasonic Level Transducer Description and application The MPULxx is an ultrasonic transducer used for determining
Type: Article No.: 0067720.006 Dimensions ø95 PG7 45.25 16 101 ca. 122 ø53 NPS 2" Figure 1: Ultrasonic Level Transducer Description and application The MPULxx is an ultrasonic transducer used for determining
IVR: Sensing Self-Motion 26/02/2015
 IVR: Sensing Self-Motion 26/02/2015 Overview Proprioception Sensors for self-sensing in biological systems proprioception vestibular system in robotic systems velocity and acceleration sensing force sensing
IVR: Sensing Self-Motion 26/02/2015 Overview Proprioception Sensors for self-sensing in biological systems proprioception vestibular system in robotic systems velocity and acceleration sensing force sensing
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Sensors for orientation and control of satellites and space probes
 Sensors for orientation and control of satellites and space probes Ing. Ondrej Závodský GOSPACE s.r.o. ESA Contract No. 4000117400/16NL/NDe Specialized lectures Content 1) How to determine the orientation
Sensors for orientation and control of satellites and space probes Ing. Ondrej Závodský GOSPACE s.r.o. ESA Contract No. 4000117400/16NL/NDe Specialized lectures Content 1) How to determine the orientation
RPLIDAR A2. Introduction and Datasheet. Model: A2M3 A2M4 OPTMAG. Shanghai Slamtec.Co.,Ltd rev.1.0 Low Cost 360 Degree Laser Range Scanner
 RPLIDAR A2 2016-07-04 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M3 A2M4 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
RPLIDAR A2 2016-07-04 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M3 A2M4 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
ME 434 MEMS Tuning Fork Gyroscope Amanda Bristow Stephen Nary Travis Barton 12/9/10
 ME 434 MEMS Tuning Fork Gyroscope Amanda Bristow Stephen Nary Travis Barton 12/9/10 1 Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
ME 434 MEMS Tuning Fork Gyroscope Amanda Bristow Stephen Nary Travis Barton 12/9/10 1 Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Sensor Data Fusion Using Kalman Filter
 Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
Sonic Distance Sensors
 Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Chapter 3 Solution to Problems
 Chapter 3 Solution to Problems 1. The telemetry system of a geostationary communications satellite samples 100 sensors on the spacecraft in sequence. Each sample is transmitted to earth as an eight-bit
Chapter 3 Solution to Problems 1. The telemetry system of a geostationary communications satellite samples 100 sensors on the spacecraft in sequence. Each sample is transmitted to earth as an eight-bit
Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4
 Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4 B.Tech., Student, Dept. Of EEE, Pragati Engineering College,Surampalem,
Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4 B.Tech., Student, Dept. Of EEE, Pragati Engineering College,Surampalem,
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Agenda Motivation Systems and Sensors Algorithms Implementation Conclusion & Outlook
 Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Lecture 02. Introduction of Remote Sensing
 Lecture 02. Introduction of Remote Sensing Concept of Remote Sensing Picture of Remote Sensing Content of Remote Sensing Classification of Remote Sensing Passive Remote Sensing Active Remote Sensing Comparison
Lecture 02. Introduction of Remote Sensing Concept of Remote Sensing Picture of Remote Sensing Content of Remote Sensing Classification of Remote Sensing Passive Remote Sensing Active Remote Sensing Comparison
3D ULTRASONIC STICK FOR BLIND
 3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
Sensing and Perception: Localization and positioning. by Isaac Skog
 Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
PERSONS AND OBJECTS LOCALIZATION USING SENSORS
 Investe}te în oameni! FONDUL SOCIAL EUROPEAN Programul Operational Sectorial pentru Dezvoltarea Resurselor Umane 2007-2013 eng. Lucian Ioan IOZAN PhD Thesis Abstract PERSONS AND OBJECTS LOCALIZATION USING
Investe}te în oameni! FONDUL SOCIAL EUROPEAN Programul Operational Sectorial pentru Dezvoltarea Resurselor Umane 2007-2013 eng. Lucian Ioan IOZAN PhD Thesis Abstract PERSONS AND OBJECTS LOCALIZATION USING
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
Communication and Navigation Systems for Aviation
 Higher National Unit Specification General information for centres Unit title: Communication and Navigation Systems for Aviation Unit code: F0M3 35 Unit purpose: This Unit is designed to allow candidates
Higher National Unit Specification General information for centres Unit title: Communication and Navigation Systems for Aviation Unit code: F0M3 35 Unit purpose: This Unit is designed to allow candidates
Channel Modeling ETIN10. Wireless Positioning
 Channel Modeling ETIN10 Lecture no: 10 Wireless Positioning Fredrik Tufvesson Department of Electrical and Information Technology 2014-03-03 Fredrik Tufvesson - ETIN10 1 Overview Motivation: why wireless
Channel Modeling ETIN10 Lecture no: 10 Wireless Positioning Fredrik Tufvesson Department of Electrical and Information Technology 2014-03-03 Fredrik Tufvesson - ETIN10 1 Overview Motivation: why wireless
Development of Control Algorithm for Ring Laser Gyroscope
 International Journal of Scientific and Research Publications, Volume 2, Issue 10, October 2012 1 Development of Control Algorithm for Ring Laser Gyroscope P. Shakira Begum, N. Neelima Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 10, October 2012 1 Development of Control Algorithm for Ring Laser Gyroscope P. Shakira Begum, N. Neelima Department of Electronics
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
Chapter 23 Electromagnetic Waves Lecture 14
 Chapter 23 Electromagnetic Waves Lecture 14 23.1 The Discovery of Electromagnetic Waves 23.2 Properties of Electromagnetic Waves 23.3 Electromagnetic Waves Carry Energy and Momentum 23.4 Types of Electromagnetic
Chapter 23 Electromagnetic Waves Lecture 14 23.1 The Discovery of Electromagnetic Waves 23.2 Properties of Electromagnetic Waves 23.3 Electromagnetic Waves Carry Energy and Momentum 23.4 Types of Electromagnetic
Data and Computer Communications Chapter 4 Transmission Media
 Data and Computer Communications Chapter 4 Transmission Media Ninth Edition by William Stallings Data and Computer Communications, Ninth Edition by William Stallings, (c) Pearson Education - Prentice Hall,
Data and Computer Communications Chapter 4 Transmission Media Ninth Edition by William Stallings Data and Computer Communications, Ninth Edition by William Stallings, (c) Pearson Education - Prentice Hall,
Introduction to Total Station and GPS
 Introduction to Total Station and GPS Dr. P. NANJUNDASWAMY Professor of Civil Engineering J S S Science and Technology University S J College of Engineering Mysuru 570 006 Introduction History GPS Overview
Introduction to Total Station and GPS Dr. P. NANJUNDASWAMY Professor of Civil Engineering J S S Science and Technology University S J College of Engineering Mysuru 570 006 Introduction History GPS Overview
Small and easy to mount IP67 rated. distance to target 1 Weather station monitoring
 4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
Laboratory testing of LoRa modulation for CubeSat radio communications
 Laboratory testing of LoRa modulation for CubeSat radio communications Alexander Doroshkin, Alexander Zadorozhny,*, Oleg Kus 2, Vitaliy Prokopyev, and Yuri Prokopyev Novosibirsk State University, 639 Novosibirsk,
Laboratory testing of LoRa modulation for CubeSat radio communications Alexander Doroshkin, Alexander Zadorozhny,*, Oleg Kus 2, Vitaliy Prokopyev, and Yuri Prokopyev Novosibirsk State University, 639 Novosibirsk,
Measuring Galileo s Channel the Pedestrian Satellite Channel
 Satellite Navigation Systems: Policy, Commercial and Technical Interaction 1 Measuring Galileo s Channel the Pedestrian Satellite Channel A. Lehner, A. Steingass, German Aerospace Center, Münchnerstrasse
Satellite Navigation Systems: Policy, Commercial and Technical Interaction 1 Measuring Galileo s Channel the Pedestrian Satellite Channel A. Lehner, A. Steingass, German Aerospace Center, Münchnerstrasse
Modern Navigation. Thomas Herring
 12.215 Modern Navigation Thomas Herring Summary of Last class Finish up some aspects of estimation Propagation of variances for derived quantities Sequential estimation Error ellipses Discuss correlations:
12.215 Modern Navigation Thomas Herring Summary of Last class Finish up some aspects of estimation Propagation of variances for derived quantities Sequential estimation Error ellipses Discuss correlations:
Relative Navigation, Timing & Data. Communications for CubeSat Clusters. Nestor Voronka, Tyrel Newton
 Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
Govt. Engineering College Jhalawar Model Question Paper Subject- Remote Sensing & GIS
 Govt. Engineering College Jhalawar Model Question Paper Subject- Remote Sensing & GIS Time: Max. Marks: Q1. What is remote Sensing? Explain the basic components of a Remote Sensing system. Q2. What is
Govt. Engineering College Jhalawar Model Question Paper Subject- Remote Sensing & GIS Time: Max. Marks: Q1. What is remote Sensing? Explain the basic components of a Remote Sensing system. Q2. What is
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Introduction to ROBOTICS. Robot Sensing and Sensors
 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu 1 Brief Review (Mobot Locomotion) 2 ICR of wheeled
Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu 1 Brief Review (Mobot Locomotion) 2 ICR of wheeled
Torque on a Current Loop: Motors. and Meters
 OpenStax-CNX module: m61560 1 Torque on a Current Loop: Motors * and Meters OpenStax Physics with Courseware Based on Torque on a Current Loop: Motors and Meters by OpenStax This work is produced by OpenStax-CNX
OpenStax-CNX module: m61560 1 Torque on a Current Loop: Motors * and Meters OpenStax Physics with Courseware Based on Torque on a Current Loop: Motors and Meters by OpenStax This work is produced by OpenStax-CNX
CSE 165: 3D User Interaction. Lecture #7: Input Devices Part 2
 CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
Aerobasics An Introduction to Aeronautics
 Aerobasics An Introduction to Aeronautics 14. Air Navigation Principles S P Govinda Raju S P Govinda Raju retired as professor from the Department of Aerospace Engineering, Indian Institute of Science
Aerobasics An Introduction to Aeronautics 14. Air Navigation Principles S P Govinda Raju S P Govinda Raju retired as professor from the Department of Aerospace Engineering, Indian Institute of Science
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
By Pierre Olivier, Vice President, Engineering and Manufacturing, LeddarTech Inc.
 Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Ultrasound-Based Indoor Robot Localization Using Ambient Temperature Compensation
 Acta Universitatis Sapientiae Electrical and Mechanical Engineering, 8 (2016) 19-28 DOI: 10.1515/auseme-2017-0002 Ultrasound-Based Indoor Robot Localization Using Ambient Temperature Compensation Csaba
Acta Universitatis Sapientiae Electrical and Mechanical Engineering, 8 (2016) 19-28 DOI: 10.1515/auseme-2017-0002 Ultrasound-Based Indoor Robot Localization Using Ambient Temperature Compensation Csaba
An Introduction to Geomatics. Prepared by: Dr. Maher A. El-Hallaq خاص بطلبة مساق مقدمة في علم. Associate Professor of Surveying IUG
 An Introduction to Geomatics خاص بطلبة مساق مقدمة في علم الجيوماتكس Prepared by: Dr. Maher A. El-Hallaq Associate Professor of Surveying IUG 1 Airborne Imagery Dr. Maher A. El-Hallaq Associate Professor
An Introduction to Geomatics خاص بطلبة مساق مقدمة في علم الجيوماتكس Prepared by: Dr. Maher A. El-Hallaq Associate Professor of Surveying IUG 1 Airborne Imagery Dr. Maher A. El-Hallaq Associate Professor
REVERBERATION CHAMBER FOR EMI TESTING
 1 REVERBERATION CHAMBER FOR EMI TESTING INTRODUCTION EMI Testing 1. Whether a product is intended for military, industrial, commercial or residential use, while it must perform its intended function in
1 REVERBERATION CHAMBER FOR EMI TESTING INTRODUCTION EMI Testing 1. Whether a product is intended for military, industrial, commercial or residential use, while it must perform its intended function in
Degree of mobility Degree of steerability
 1 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu Brief Review (Mobot Locomotion) 1 2 ICR of
1 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu Brief Review (Mobot Locomotion) 1 2 ICR of
Long range magnetic localization- accuracy and range study
 Journal of Physics: Conference Series OPEN ACCESS Long range magnetic localization- accuracy and range study To cite this article: J Vcelak et al 2013 J. Phys.: Conf. Ser. 450 012023 View the article online
Journal of Physics: Conference Series OPEN ACCESS Long range magnetic localization- accuracy and range study To cite this article: J Vcelak et al 2013 J. Phys.: Conf. Ser. 450 012023 View the article online
MB7760, MB7769, MB7780, MB7789
 4-20SC-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7760, MB7769, MB7780, MB7789 4 The 4-20SC-MaxSonar-WR sensor line is a high performance ultrasonic
4-20SC-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7760, MB7769, MB7780, MB7789 4 The 4-20SC-MaxSonar-WR sensor line is a high performance ultrasonic
RPLIDAR A1. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A1M8. Shanghai Slamtec.Co.,Ltd rev.1.
 www.slamtec.com RPLIDAR A1 2018-03-23 rev.1.1 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A1M8 Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 SYSTEM CONNECTION...
www.slamtec.com RPLIDAR A1 2018-03-23 rev.1.1 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A1M8 Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 SYSTEM CONNECTION...
ASC IMU 7.X.Y. Inertial Measurement Unit (IMU) Description.
 Description.") Inertial Measurement Unit (IMU) 6-axis MEMS mini-imu Acceleration & Angular Rotation analog output 12-pin connector with detachable cable Aluminium housing Made in Germany Features Acceleration rate: ±2g
Inertial Measurement Unit (IMU) 6-axis MEMS mini-imu Acceleration & Angular Rotation analog output 12-pin connector with detachable cable Aluminium housing Made in Germany Features Acceleration rate: ±2g
36. Global Positioning System
 36. Introduction to the Global Positioning System (GPS) Why do we need GPS? Position: a basic need safe sea travel, crowed skies, resource management, legal questions Positioning: a challenging job local
36. Introduction to the Global Positioning System (GPS) Why do we need GPS? Position: a basic need safe sea travel, crowed skies, resource management, legal questions Positioning: a challenging job local
1. Introduction. 1.2 Harlie Overview
 HARLIE I, certify that the engineering design in the vehicle (original or changes) by the current student team has been significant and equivalent to what might be awarded credit in a senior design course.
HARLIE I, certify that the engineering design in the vehicle (original or changes) by the current student team has been significant and equivalent to what might be awarded credit in a senior design course.
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
Unguided Media and Matched Filter After this lecture, you will be able to Example?
 Unguided Media and Matched Filter After this lecture, you will be able to describe the physical and transmission characteristics of various unguided media Example? B.1 Unguided media Guided to unguided
Unguided Media and Matched Filter After this lecture, you will be able to describe the physical and transmission characteristics of various unguided media Example? B.1 Unguided media Guided to unguided
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU
 Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Study of small scale plasma irregularities. Đorđe Stevanović
 Study of small scale plasma irregularities in the ionosphere Đorđe Stevanović Overview 1. Global Navigation Satellite Systems 2. Space weather 3. Ionosphere and its effects 4. Case study a. Instruments
Study of small scale plasma irregularities in the ionosphere Đorđe Stevanović Overview 1. Global Navigation Satellite Systems 2. Space weather 3. Ionosphere and its effects 4. Case study a. Instruments
Wireless Localization Techniques CS441
 Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
A CubeSat-Based Optical Communication Network for Low Earth Orbit
 A CubeSat-Based Optical Communication Network for Low Earth Orbit Richard Welle, Alexander Utter, Todd Rose, Jerry Fuller, Kristin Gates, Benjamin Oakes, and Siegfried Janson The Aerospace Corporation
A CubeSat-Based Optical Communication Network for Low Earth Orbit Richard Welle, Alexander Utter, Todd Rose, Jerry Fuller, Kristin Gates, Benjamin Oakes, and Siegfried Janson The Aerospace Corporation