The project. General challenges and problems. Our subjects. The attachment and locomotion system
|
|
|
- Emily Watts
- 5 years ago
- Views:
Transcription
1
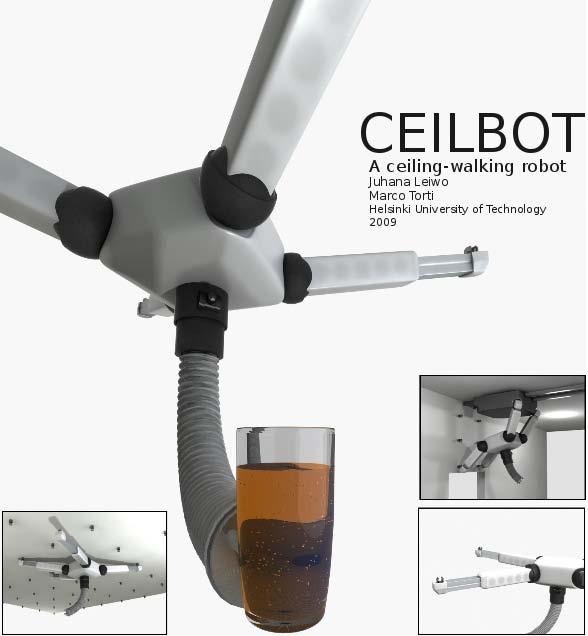
2 The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes advantage of the free uncluttered space at the ceiling of a building's interior. The main motivation in designing a ceiling-going robot is to avoid the many obstacles at floor level in a human-inhabited space. The robot could therefore be built simpler and perform tasks which couldn't previously be robotized. The first part of the project took place in the fall term of The participating students worked in groups of two and progress was reviewed each week in a meeting where each group held a presentation of their work. General challenges and problems The ceiling robot is intended to work in an environment designed for humans and it is supposed to be possible to install into a space not designed specially with the robot in mind. The challenges of operating must therefore be assessed in the robot s design alone, not by tailoring the operating environment to suit the robot. From a robot s point of view human living quarters are full of constantly changing elements that are difficult to categorize. Generally the only things that can be assumed to stay in the same place are the walls, floors, ceilings, doorways and windows. Even though moving on the ceiling solves the problem of navigating among furniture and other objects lying around the floor, there are other issues to be solved. Perhaps the most obvious challenge is how to attach the robot on the ceiling securely so that it can still move around freely. Another point to consider is that even ceilings are not completely obstacle-free. There are many kinds of fixtures, air-conditioning pipes, lamps, wires, sprinklers and projectors that the robot should avoid collision with. Doorways also pose a design challenge, since a doorway is almost always lower than the ceiling and the ceiling can be on different levels on different sides of a door. Doors also need to be able to open and close. Determining what the robot should be able to do and finding out how it might perform these tasks is a much bigger challenge than making it move around reliably. Many of the tasks discussed on the course are possible using currently existing technology. Others require a lot of research to become feasible. A good place to start could be to design a sensor system capable of providing the necessary information and feedback for a multipurpose robot. Our subjects In the beginning of the course each team selected a specific application of the robot on which they concentrated. Instead of developing another form of the robot, we decided to work on some aspects of the design which would be common for all suggested applications. We chose to develop a location and mapping system and to study different methods of locomotion and attachment of the robot on the ceiling. Additionally we studied what different types of sensors the robot would need and what sort of safety protocol it should employ. The attachment and locomotion system The requirements for the attachment and locomotion system were that it should first of all keep the robot securely attached to the ceiling even in case of power failure, and

3 allow it to easily move around and reach all parts of its operating environment. Secondly, the robot should be able to avoid obstacles like ceiling lamps and other fixtures, and preferably also pass through doorways. Initially several different types of system were discussed. Systems using magnets, suction cups or vacuum pumps were discarded as too unreliable, too weak and, except for suction cups, too energy-consuming. Rails were also left outside the scope of our group, because another group was already designing a railed system. In the end, we decided to present two separate systems, one which uses chains and another which uses tactile limbs. In the chain version, the robot is suspended by four chains, two on each side, from two actuators, one on each side of the ceiling of a rectangular room. The actuators are mounted on rails and are able to move along the length of the room. The robot is positioned laterally by moving the pair of actuators to cover one axis, and by adjusting the length of the chain pairs on each side to cover the other lateral axis. The vertical position is adjusted by giving slack or reeling in the chains on both sides. Two chains on each side allow the robot to resist torque perpendicular to the chains, and attaching the chains to moving actuators leaves more free space than hanging the robot from cables at each corner of the room. Chains are also stiffer than wires, which helps manage the pendulum motion of the suspended robot. Primarily the pendulum motion is to be cancelled by counter-moving the actuators with help of an acceleration feedback system. This system would be fast and relatively simple to control. It would allow the robot to pass under ceiling-mounted obstacles and reach all parts of a rectangular room easily provided there's no high furniture in the middle part of the room. It would also be easy to reach things that are low down without having to make the robot s manipulator arm very long. This system would however be restricted to one room, because it can't pass through doorways. High pieces of furniture like bookcases and cupboards also limit the use of this system. (Or vice versa, this system limits the use of high furniture.)


4 In the other one of our proposed systems, the robot uses four arms to grip metal anchor pins mounted on the ceiling. The arms are telescopic and they are attached to the robot with a two degree-of-freedom joint. The tip of each arm has an actuated gripping claw. The pin and claw are shaped so that when the claw is fastened to the pin, the pin is able to swivel like a ball joint. The pins are mounted on the ceiling in an evenly spaced grid. The robot moves around the room climbing from pin to pin with three of the arms fastened while one of them is changing grip. The advantage of this system is that it can be mounted on almost any shape of ceiling. Passing through doors is also possible, if anchor pins are mounted on the wall above the door. Using this system, the robot would not be restricted to moving in the ceiling, it could use the walls as well if needed. The downside of the climbing robot is complexity. The arms must move quickly and precisely for the robot to not be frustratingly slow. Also, it is probably not sufficient to rely on preprogrammed maps to locate the anchor pins, but some kind of active targetfinding system must be used. We also presented an idea of combining the two systems. The robot could use the climbing arms to attach itself to a mobile platform, which in turn uses the chain system to move in a room. This could be useful in an environment with one large room and many small ones. The large room would be equipped with the chain platform and the small rooms would only have anchor pins.

5 The mapping and locating system Our other objective was to study the robot's mapping and location system. We presented an outline for a system in which the robot would use a layered data structure for mapping its environment and locating itself. The idea of the layered map structure is to store things in the robot's environment in different data layers based on how often they change. The robot can be expected to be installed in a single operation environment for a long time. There can also be expected to be people in this operation environment, and people change things. Not everything changes, however. It can be safely assumed that the positions of walls, doorways, ceilings and such do not change at all, and much of the furniture remains in the same place for a long time. The mapping data structure would have one high-level map, which would contain the least-changing elements, one medium level map, which would contain elements that change seldom but aren't completely fixed, and a low-level map which only contains the most recently measured data. Also the frequency of change for different regions would be stored in a separate data layer. The robot would build these

6 maps by itself, starting when it is first introduced to a new environment and gathering more data as it works. The high-level map - The whole high-level map is used as a landmark when correcting location - Points in the high-level map have a reliability factor which denotes how often the point has been averaged over. - Further location-correction can use small spot scans of high-reliability areas instead of a full high resolution scan. - The spot scans will also be averaged to the high-level map. - To increase reliability evenly, spot scans will be taken from less reliable areas within reach in addition to the highest reliability portions. - The averaging is done using a distance threshold between points in the old map and the new map. - Also the unaveraged points are saved in the new map so that newly visited areas get saved. (With the exception of the medium-level points described later)þ - The high-level map contains features that have not changed.
7 The medium-level map - If a stored point is in a position which could be seen from both the old high-level map and the new scan, but exists in only one of them, it gets added to the medium level map. - This means that only such points get added that were introduced or removed AFTER the previous scan of the area, that is, the robot can now see behind these points, or has previously been able to do so. - Points added to the medium-level map get removed from the high-level map. - This way the high level map will not contain features that have been added or removed during the robot's operation in the area. - Features that already exist in the medium map will be re-added. - The re-added features are averaged and given a reliability factor. - If a feature that exists in the medium map is not found when later scanning the same area, it is removed from the map. - Thus the medium-level map contains features that have changed and may still exist. The change frequency map - The change frequency map contains an intensity distribution that describes how often an area has experienced change. - When a feature is added to or removed from the medium level map the intensity in the corresponding region of the change frequency map is incremented. - The intensity values are made to decline over time so that areas that often change have higher intensities than areas of sporadic change. With this sort of a mapping structure, the robot's navigation would become quicker as it grows used to its environment. It could plan its route ahead using the high-level map, and only perform quick spot-measurements to make sure the map still holds. A fullprecision scan would only be needed at the moment of performing a task or in case the spot measurements don't have enough in common with the stored map.

8 The sensor system For the sensor system, we concluded that the robot should rely on combining data from a number of basic senses instead of using proprietary sensors to support each individual function. We suggested the basic sensor system would contain proximity sensors, a multi-axis accelerometer and gyroscope, position information from the robot s servos, a video camera and a three-dimensional spatial scanner. The camera and the 3d-scanner could be combined, if the scanning was performed using structured light triangulation. A planar-beam laser would be mounted at a fixed distance below or above the camera so that its pointing angle can be steered with a stepper motor. The laser beam s projection in the environment would be extracted from the camera image, and the information of the laser source s angle and position would be used to triangulate the projection image into three dimensions. The 3d data would be fed to the mapping algorithm described earlier. For proximity sensing, we suggested ultrasound ranging, reflected light intensity measurement and touch whiskers. Ideally the robot would have all of its moving parts covered in a grid of proximity sensors. That way it could navigate in cramped spaces without knocking things over.

9 Because the robot is intended to operate in an environment with humans, it would help if it could distinguish between humans and objects. This would increase safety and allow more interaction with users. Primarily the robot would use facial detection from the camera image, but to aid this function we suggested using an infra-red heat sensor. The sensor would point in the same direction as the camera, and the robot would register the body heat of humans in its view. It could then try to stay out of the way or stop moving if people come close to it. The system would essentially emulate the function of a (very expensive) heat camera. The robot could also be equipped with a stereo microphone, but more as an auxiliary sensor than part of the basic sensing system. The microphone would be used for detecting operators voice commands and, for example, signal beeps from other household machinery in case of tasks like emptying a dishwashing machine after it has finished washing. Safety of operation The basic rule is that the robot should not in any way disturb the normal activity of people in its operating environment. It should itself attempt to keep out of the way of people or, failing that, avoid hard impact in case of collision. The sensor system designed earlier already carries most of the sensors required for this. In addition to the proximity sensor system on the robot's body, the manipulator arm could be equipped with extra touch sensors (whiskers). An unintended bump would then cause the manipulator to stop or even flinch away from the stimulus. An obvious safety feature to have is an emergency stop switch. Hitting the switch would cause the robot to stop immediately. Besides a switch, a voice command could also be used for emergency stopping. Rather than a specific word, any loud sudden noise would

10 be interpreted as a stop command. This way, even a barking dog could prevent the robot from doing something dangerous. (A thing worth considering is that most dogs are likely to bark at robots whatever it is the robots are doing. Perhaps the robot should have a constant false alarm rate algorithm to ignore unnecessary noise, or some form of human voice detection could be used.) The robot must also avoid damaging property, including itself. Force feedback in the manipulator and locomotion arms would be used to apply the minimum amount of force required for an action. Picking up a pair of eyeglasses must be done with less strength than carrying a cast-iron frying pan, and the robot can t just be made so weak that it couldn t break the glasses anyway. The robot should however not be strong enough to tear itself apart with its own actuators in any pose. Also the anchor pins on the ceiling must be able to support the combined weight of the robot and anything it is capable of lifting. At least two of the robot's locomotion arms must be attached on anchor pins at any moment (three arms are required for stability anyway) and the arms must maintain grip even if power is removed. The robot is connected to electrical power through plugs in the gripping claws. Each anchor pin has a socket with both electrical poles and each claw has a plug. This way the power source is always connected when the robot is on the ceiling. The power supply to the anchor pins' sockets is low voltage DC, so that the robot doesn't need to carry a transformer. To ensure operation even in case of a power cutoff the robot carries a reserve battery with enough capacity for about five minutes of normal operation and one hour of operation for the control computer. Of course the pin grid could also be fitted with an Uninterruptible Power Supply (UPS) system, but an onboard battery works even if the pin grid itself fails.

11
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
OPTICS IN MOTION. Introduction: Competing Technologies: 1 of 6 3/18/2012 6:27 PM.
 1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
1 Abstract and Motivation
 1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
Robo-Sloth: A Rope-Climbing Robot
 Robo-Sloth: A Rope-Climbing Robot Sandeep Urankar, Pranjal Jain, Anurag Singh, Anupam Saxena and Bhaskar Dasgupta Department of Mechanical Engineering Indian Institute of Technology Kanpur 208016 Abstract
Robo-Sloth: A Rope-Climbing Robot Sandeep Urankar, Pranjal Jain, Anurag Singh, Anupam Saxena and Bhaskar Dasgupta Department of Mechanical Engineering Indian Institute of Technology Kanpur 208016 Abstract
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
Dumpster Optics BENDING LIGHT REFLECTION
 Dumpster Optics BENDING LIGHT REFLECTION WHAT KINDS OF SURFACES REFLECT LIGHT? CAN YOU FIND A RULE TO PREDICT THE PATH OF REFLECTED LIGHT? In this lesson you will test a number of different objects to
Dumpster Optics BENDING LIGHT REFLECTION WHAT KINDS OF SURFACES REFLECT LIGHT? CAN YOU FIND A RULE TO PREDICT THE PATH OF REFLECTED LIGHT? In this lesson you will test a number of different objects to
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
An Introduction to Programming using the NXT Robot:
 An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics
 A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics Part Three: how sensors and actuators work and how to hook them up to a microcontroller There are gazillions of different
A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics Part Three: how sensors and actuators work and how to hook them up to a microcontroller There are gazillions of different
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
AgilEye Manual Version 2.0 February 28, 2007
 AgilEye Manual Version 2.0 February 28, 2007 1717 Louisiana NE Suite 202 Albuquerque, NM 87110 (505) 268-4742 support@agiloptics.com 2 (505) 268-4742 v. 2.0 February 07, 2007 3 Introduction AgilEye Wavefront
AgilEye Manual Version 2.0 February 28, 2007 1717 Louisiana NE Suite 202 Albuquerque, NM 87110 (505) 268-4742 support@agiloptics.com 2 (505) 268-4742 v. 2.0 February 07, 2007 3 Introduction AgilEye Wavefront
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
contents in detail PART I GETTING STARTED acknowledgments...xvii
 contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
FLL Robot Design Workshop
 FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
P3 Essential Questions X Rays, CT Scans and Ultrasound
 P3 Essential Questions X Rays, CT Scans and Ultrasound Ultrasound and X-rays are waves used in hospitals to create images of the inside of the human body. To produce the images below, the waves must enter
P3 Essential Questions X Rays, CT Scans and Ultrasound Ultrasound and X-rays are waves used in hospitals to create images of the inside of the human body. To produce the images below, the waves must enter
KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016
 KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016 Hojin Jeon, Donghyun Ahn, Yeunhee Kim, Yunho Han, Jeongmin Park, Soyeon Oh, Seri Lee, Junghun Lee, Namkyun Kim, Donghee Han, ChaeEun
KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016 Hojin Jeon, Donghyun Ahn, Yeunhee Kim, Yunho Han, Jeongmin Park, Soyeon Oh, Seri Lee, Junghun Lee, Namkyun Kim, Donghee Han, ChaeEun
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION 1. INTRODUCTION
 USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION Brad Armstrong 1, Dana Gronau 2, Pavel Ikonomov 3, Alamgir Choudhury 4, Betsy Aller 5 1 Western Michigan University, Kalamazoo, Michigan;
USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION Brad Armstrong 1, Dana Gronau 2, Pavel Ikonomov 3, Alamgir Choudhury 4, Betsy Aller 5 1 Western Michigan University, Kalamazoo, Michigan;
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Rack Attack. EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M.
 04/22/08 Student Name: Barry Solomon TAs : Adam Barnett Mike Pridgen Sara Keen Rack Attack EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M. Schwartz,
04/22/08 Student Name: Barry Solomon TAs : Adam Barnett Mike Pridgen Sara Keen Rack Attack EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M. Schwartz,
L09. PID, PURE PURSUIT
 1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
BEST PRACTICES COURSE WEEK 14 PART 2 Advanced Mouse Constraints and the Control Box
 BEST PRACTICES COURSE WEEK 14 PART 2 Advanced Mouse Constraints and the Control Box Copyright 2012 by Eric Bobrow, all rights reserved For more information about the Best Practices Course, visit http://www.acbestpractices.com
BEST PRACTICES COURSE WEEK 14 PART 2 Advanced Mouse Constraints and the Control Box Copyright 2012 by Eric Bobrow, all rights reserved For more information about the Best Practices Course, visit http://www.acbestpractices.com
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Name & SID 1 : Name & SID 2:
 EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
UWYO VR SETUP INSTRUCTIONS
 UWYO VR SETUP INSTRUCTIONS Step 1: Power on the computer by pressing the power button on the top right corner of the machine. Step 2: Connect the headset to the top of the link box (located on the front
UWYO VR SETUP INSTRUCTIONS Step 1: Power on the computer by pressing the power button on the top right corner of the machine. Step 2: Connect the headset to the top of the link box (located on the front
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
CLICK HERE TO SUBSCRIBE
 Mike: Hey, what's happening? Mike here from The Membership Guys. Welcome to Episode 144 of The Membership Guys podcast. This is the show that helps you grow a successful membership website. Thanks so much
Mike: Hey, what's happening? Mike here from The Membership Guys. Welcome to Episode 144 of The Membership Guys podcast. This is the show that helps you grow a successful membership website. Thanks so much
QUICKSTART COURSE - MODULE 1 PART 2
 QUICKSTART COURSE - MODULE 1 PART 2 copyright 2011 by Eric Bobrow, all rights reserved For more information about the QuickStart Course, visit http://www.acbestpractices.com/quickstart Hello, this is Eric
QUICKSTART COURSE - MODULE 1 PART 2 copyright 2011 by Eric Bobrow, all rights reserved For more information about the QuickStart Course, visit http://www.acbestpractices.com/quickstart Hello, this is Eric
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Programming PIC Microchips
 Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Haptic control in a virtual environment
 Haptic control in a virtual environment Gerard de Ruig (0555781) Lourens Visscher (0554498) Lydia van Well (0566644) September 10, 2010 Introduction With modern technological advancements it is entirely
Haptic control in a virtual environment Gerard de Ruig (0555781) Lourens Visscher (0554498) Lydia van Well (0566644) September 10, 2010 Introduction With modern technological advancements it is entirely
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
16. Sensors 217. eye hand control. br-er16-01e.cdr
 16. Sensors 16. Sensors 217 The welding process is exposed to disturbances like misalignment of workpiece, inaccurate preparation, machine and device tolerances, and proess disturbances, Figure 16.1. sensor
16. Sensors 16. Sensors 217 The welding process is exposed to disturbances like misalignment of workpiece, inaccurate preparation, machine and device tolerances, and proess disturbances, Figure 16.1. sensor
Final Report Metallocalizer
 Date: 12/08/09 Student Name: Fernando N. Coviello TAs : Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Final Report Metallocalizer University of Florida Department
Date: 12/08/09 Student Name: Fernando N. Coviello TAs : Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Final Report Metallocalizer University of Florida Department
Stop and think! Tool changes are automatic but rigging, supervision and quality control are all manual operations.
 CNC Background CNC (Computer Numeric Control) is a collective term for computer controlled machine tools used in the fabrication and manufacture of parts. There are hundreds of different types of CNC machine.
CNC Background CNC (Computer Numeric Control) is a collective term for computer controlled machine tools used in the fabrication and manufacture of parts. There are hundreds of different types of CNC machine.
High-Efficiency Weld Robot
 Technical Paper High-Efficiency Weld Robot Nobuyoshi Yamanaka Tairo Samejima An anti-collision function and follow-up welding function to operate a system that uses plural weld robots at a high efficiency
Technical Paper High-Efficiency Weld Robot Nobuyoshi Yamanaka Tairo Samejima An anti-collision function and follow-up welding function to operate a system that uses plural weld robots at a high efficiency
Robotic Installation of OSI-Bolts
 Robotic Installation of OSI-Bolts 2015-01-2512 Mark W. Sydenham and Tim Brown Electroimpact Inc. CITATION: Sydenham, M. and Brown, T., "Robotic Installation of OSI-Bolts," SAE Technical Paper 2015-01-2512,
Robotic Installation of OSI-Bolts 2015-01-2512 Mark W. Sydenham and Tim Brown Electroimpact Inc. CITATION: Sydenham, M. and Brown, T., "Robotic Installation of OSI-Bolts," SAE Technical Paper 2015-01-2512,
FORCE LIMITATION WITH AUTOMATIC RETURN MECHANISM FOR RISK REDUCTION OF REHABILITATION ROBOTS. Noriyuki TEJIMA Ritsumeikan University, Kusatsu, Japan
 FORCE LIMITATION WITH AUTOMATIC RETURN MECHANISM FOR RISK REDUCTION OF REHABILITATION ROBOTS Noriyuki TEJIMA Ritsumeikan University, Kusatsu, Japan Abstract In this paper, a new mechanism to reduce the
FORCE LIMITATION WITH AUTOMATIC RETURN MECHANISM FOR RISK REDUCTION OF REHABILITATION ROBOTS Noriyuki TEJIMA Ritsumeikan University, Kusatsu, Japan Abstract In this paper, a new mechanism to reduce the
Learn about the RoboMind programming environment
 RoboMind Challenges Getting Started Learn about the RoboMind programming environment Difficulty: (Easy), Expected duration: an afternoon Description This activity uses RoboMind, a robot simulation environment,
RoboMind Challenges Getting Started Learn about the RoboMind programming environment Difficulty: (Easy), Expected duration: an afternoon Description This activity uses RoboMind, a robot simulation environment,
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
How to Design and Scratchbuild a Structure
 I wish I could learn how to scratchbuild. Is a comment I have heard many times. In this presentation I hope to demonstrate the basic techniques used in designing a building to be built from scratch. We
I wish I could learn how to scratchbuild. Is a comment I have heard many times. In this presentation I hope to demonstrate the basic techniques used in designing a building to be built from scratch. We
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
PULSE MATIC 9000 FULL DIGITAL New professional metal detector
 1 PULSE MATIC 9000 FULL DIGITAL New professional metal detector IMPORTANT NOTE: The battery charger of your PULSE MATIC is 110v-240v at 12v. Consequently this battery charger can be plugged in any (AC)
1 PULSE MATIC 9000 FULL DIGITAL New professional metal detector IMPORTANT NOTE: The battery charger of your PULSE MATIC is 110v-240v at 12v. Consequently this battery charger can be plugged in any (AC)
MITOCW watch?v=7bachnlg8co
 MITOCW watch?v=7bachnlg8co The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high-quality, educational resources for free.
MITOCW watch?v=7bachnlg8co The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high-quality, educational resources for free.
RoboMind Challenges. Line Following. Description. Make robots navigate by itself. Make sure you have the latest software
 RoboMind Challenges Line Following Make robots navigate by itself Difficulty: (Medium), Expected duration: Couple of days Description In this activity you will use RoboMind, a robot simulation environment,
RoboMind Challenges Line Following Make robots navigate by itself Difficulty: (Medium), Expected duration: Couple of days Description In this activity you will use RoboMind, a robot simulation environment,
OpenROV. Guide 3 - Electronics. We will now move to the assembly of the electronics that will control the ROV. Written By: OpenROV
 OpenROV Guide 3 - Electronics We will now move to the assembly of the electronics that will control the ROV. Written By: OpenROV 2017 openrov.dozuki.com Page 1 of 33 INTRODUCTION We will introduce soldering
OpenROV Guide 3 - Electronics We will now move to the assembly of the electronics that will control the ROV. Written By: OpenROV 2017 openrov.dozuki.com Page 1 of 33 INTRODUCTION We will introduce soldering
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
1 Introduction. 2 Embedded Electronics Primer. 2.1 The Arduino
 Beginning Embedded Electronics for Botballers Using the Arduino Matthew Thompson Allen D. Nease High School matthewbot@gmail.com 1 Introduction Robotics is a unique and multidisciplinary field, where successful
Beginning Embedded Electronics for Botballers Using the Arduino Matthew Thompson Allen D. Nease High School matthewbot@gmail.com 1 Introduction Robotics is a unique and multidisciplinary field, where successful
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
PICO MASTER 200. UV direct laser writer for maskless lithography
 PICO MASTER 200 UV direct laser writer for maskless lithography 4PICO B.V. Jan Tinbergenstraat 4b 5491 DC Sint-Oedenrode The Netherlands Tel: +31 413 490708 WWW.4PICO.NL 1. Introduction The PicoMaster
PICO MASTER 200 UV direct laser writer for maskless lithography 4PICO B.V. Jan Tinbergenstraat 4b 5491 DC Sint-Oedenrode The Netherlands Tel: +31 413 490708 WWW.4PICO.NL 1. Introduction The PicoMaster
Fiber Optic Device Manufacturing
 Precision Motion Control for Fiber Optic Device Manufacturing Aerotech Overview Accuracy Error (µm) 3 2 1 0-1 -2 80-3 40 0-40 Position (mm) -80-80 80 40 0-40 Position (mm) Single-source supplier for precision
Precision Motion Control for Fiber Optic Device Manufacturing Aerotech Overview Accuracy Error (µm) 3 2 1 0-1 -2 80-3 40 0-40 Position (mm) -80-80 80 40 0-40 Position (mm) Single-source supplier for precision
DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY
 DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY Yutaro Fukase fukase@shimz.co.jp Hitoshi Satoh hitoshi_sato@shimz.co.jp Keigo Takeuchi Intelligent Space Project takeuchikeigo@shimz.co.jp Hiroshi
DEMONSTRATION OF ROBOTIC WHEELCHAIR IN FUKUOKA ISLAND-CITY Yutaro Fukase fukase@shimz.co.jp Hitoshi Satoh hitoshi_sato@shimz.co.jp Keigo Takeuchi Intelligent Space Project takeuchikeigo@shimz.co.jp Hiroshi
Gesture Identification Using Sensors Future of Interaction with Smart Phones Mr. Pratik Parmar 1 1 Department of Computer engineering, CTIDS
 Gesture Identification Using Sensors Future of Interaction with Smart Phones Mr. Pratik Parmar 1 1 Department of Computer engineering, CTIDS Abstract Over the years from entertainment to gaming market,
Gesture Identification Using Sensors Future of Interaction with Smart Phones Mr. Pratik Parmar 1 1 Department of Computer engineering, CTIDS Abstract Over the years from entertainment to gaming market,
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Mobile Robots Exploration and Mapping in 2D
 ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
Nao Devils Dortmund. Team Description for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Chair. Table. Robot. Laser Spot. Fiber Grating. Laser
 Obstacle Avoidance Behavior of Autonomous Mobile using Fiber Grating Vision Sensor Yukio Miyazaki Akihisa Ohya Shin'ichi Yuta Intelligent Laboratory University of Tsukuba Tsukuba, Ibaraki, 305-8573, Japan
Obstacle Avoidance Behavior of Autonomous Mobile using Fiber Grating Vision Sensor Yukio Miyazaki Akihisa Ohya Shin'ichi Yuta Intelligent Laboratory University of Tsukuba Tsukuba, Ibaraki, 305-8573, Japan
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Customer. KERN MICRO 5 axis Ultra Precision Machining Centre
 Customer KERN MICRO 5 axis Ultra Precision Machining Centre The KERN MICRO is an ultra precision machining centre with the highest level of accuracy in 5 axis configuration. The working envelope is 350
Customer KERN MICRO 5 axis Ultra Precision Machining Centre The KERN MICRO is an ultra precision machining centre with the highest level of accuracy in 5 axis configuration. The working envelope is 350
Azaad Kumar Bahadur 1, Nishant Tripathi 2
 e-issn 2455 1392 Volume 2 Issue 8, August 2016 pp. 29 35 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com Design of Smart Voice Guiding and Location Indicator System for Visually Impaired
e-issn 2455 1392 Volume 2 Issue 8, August 2016 pp. 29 35 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com Design of Smart Voice Guiding and Location Indicator System for Visually Impaired
THE PHYSICS AND THE ART OF COMMUNICATION VI I
 VI I PHYSICS AND THE ART OF COMMUNICATION THE rst important contribution of physics to the art of fi communication was the electric telegraph early in the last century. This was followed by the telephone
VI I PHYSICS AND THE ART OF COMMUNICATION THE rst important contribution of physics to the art of fi communication was the electric telegraph early in the last century. This was followed by the telephone
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Lab 8: Introduction to the e-puck Robot
 Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Spatial Sounds (100dB at 100km/h) in the Context of Human Robot Personal Relationships
 in the Context of Human Robot Personal Relationships") Spatial Sounds (100dB at 100km/h) in the Context of Human Robot Personal Relationships Edwin van der Heide Leiden University, LIACS Niels Bohrweg 1, 2333 CA Leiden, The Netherlands evdheide@liacs.nl Abstract.
Spatial Sounds (100dB at 100km/h) in the Context of Human Robot Personal Relationships Edwin van der Heide Leiden University, LIACS Niels Bohrweg 1, 2333 CA Leiden, The Netherlands evdheide@liacs.nl Abstract.
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot
 Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
A Place Beyond the Heart. Marc S. Buckley.
 A Place Beyond the Heart By Marc S. Buckley marc10buckley10@hotmail.com A storm rages outside seen through the large floor to ceiling window on the far side of the room. In the opening in the middle of
A Place Beyond the Heart By Marc S. Buckley marc10buckley10@hotmail.com A storm rages outside seen through the large floor to ceiling window on the far side of the room. In the opening in the middle of
Roborodentia Robot: Tektronix. Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016
 Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY
 INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
PS 1000 X-Scan Tips & Tricks. Quick Guide
 PS 1000 X-Scan Tips & Tricks Quick Guide en en QUICK GUIDE Tips & tricks 1. PS 1000 X-Scan Scanning on rough surfaces When the scanner is moved over a rough surface, the distance between the scanner and
PS 1000 X-Scan Tips & Tricks Quick Guide en en QUICK GUIDE Tips & tricks 1. PS 1000 X-Scan Scanning on rough surfaces When the scanner is moved over a rough surface, the distance between the scanner and
Design and Development of Novel Two Axis Servo Control Mechanism
 Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Team Description Paper
 Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
Shock Sensor Module This module is digital shock sensor. It will output a high level signal when it detects a shock event.
 Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Appendix Course Notes MIT Course Organizers. Chapter 7: LEGO Design
 EECS40/43 Appendix 4 Appendix 4 6.70 1999 Course Notes MIT 6.70 Course Organizers Chapter 7: LEGO Design 1 Chapter 7 LEGO Design When you're rst introduced to the LEGO Technic system, you may be amazed
EECS40/43 Appendix 4 Appendix 4 6.70 1999 Course Notes MIT 6.70 Course Organizers Chapter 7: LEGO Design 1 Chapter 7 LEGO Design When you're rst introduced to the LEGO Technic system, you may be amazed
Rotary Fixture M/V/X CLASS LASER SYSTEMS. Installation and Operation Instructions
 Rotary Fixture M/V/X CLASS LASER SYSTEMS Installation and Operation Instructions 02/01/2000 Introduction The Rotary Fixture controls in the Printer Driver are used along with the optional Rotary Fixture
Rotary Fixture M/V/X CLASS LASER SYSTEMS Installation and Operation Instructions 02/01/2000 Introduction The Rotary Fixture controls in the Printer Driver are used along with the optional Rotary Fixture
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Metal Fab 2017 Continuing Education. Field measuring tips & techniques
 Metal Fab 2017 Continuing Education Field measuring tips & techniques Class objectives Things to be looking for when field measuring Seeing the field measure / design through the eyes of the fabricator,
Metal Fab 2017 Continuing Education Field measuring tips & techniques Class objectives Things to be looking for when field measuring Seeing the field measure / design through the eyes of the fabricator,