Hybrid architectures. IAR Lecture 6 Barbara Webb
|
|
|
- Austin Lambert
- 5 years ago
- Views:
Transcription
1 Hybrid architectures IAR Lecture 6 Barbara Webb
2 Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options? Build up toolbox of techniques Use learning or evolutionary methods Copy existing systems (i.e. biology) Formalise interactions as dynamical systems Difficult to do some traditional (and useful) tasks. Increasingly common to adopt hybrid approach, e.g. classical planner operating on top of basic behaviours
3 Can we get the best of both worlds? Behaviour-based architectures, using combinations of reactive controllers, rather than reasoning over world models, seem to be robust, real-time, modular good for robot control. But may still want world models and traditional reasoning for path planning, map making, performance monitoring, problem solving And have introduced new problem of how to compose behaviour interactions Solution: have the robot itself intelligently select, sequence or assemble behaviours to achieve a task
4 Introduce high-level capabilities without losing low-level advantages PLAN SENSE SENSE ACT ACT
5 AuRA: Autonomous Robot Architecture (Arkin, 1997) Mission Planner Spatial Reasoner Plan Sequencer Schema Controller Motor Perceptual R E P R E S E N T A T I O N Deliberative Component Reactive Component Actuation Sensing
6 AuRA: Autonomous Robot Architecture (Arkin, 1997) Mission planner: determines current goal Spatial reasoner: produces sequence of path legs to traverse Plan sequencer: translates each path leg into a set of behaviours linking sensor and motor schemas Schema manager: starts, stops and monitors schema execution As for the basic schema architecture (see lecture 5), the robot s action is the weighted sum of motor schema vector outputs
7 AuRA: Autonomous Robot Architecture (Arkin, 1997) Once reactive execution begins, deliberation is de-activated, unless detect failure. Failure recovery works up the hierarchy: Revise plan sequence based on input so far Have spatial reasoner devise new route Have mission planner revise goals
8 AuRA: Autonomous Robot Architecture (Arkin, 1997) Potential to substitute improved methods at each level independently Mission Planner Spatial Reasoner Plan Sequencer R E P R E S E N T A T I O N Schema Controller Motor Actuation Perceptual Sensing
9 AuRA: Autonomous Robot Architecture (Arkin, 1997) User Input Rich options for user interaction User Intentions Spatial Goals Mission Alterations Mission Planner Spatial Reasoner Plan Sequencer R E P R E S E N T A T I O N Schema Controller Teleautonomy Motor Actuation Perceptual Sensing
10 AuRA: Autonomous Robot Architecture (Arkin, 1997) Learning Can introduce learning mechanisms at different levels Plan Recognition User Profile Spatial Learning Opportunism Mission Planner Spatial Reasoner Plan Sequencer R E P R E S E N T A T I O N On-line Adaptation Schema Controller Motor Perceptual Actuation Sensing

11 Embedding ethical control (Arkin, 2009)


12 Reactive Component Deliberative Component SFX: sensor fusion effects (Murphy, 2000) Biomimetic inspiration for hybrid architecture
13 Low level behaviours can support abstractions that simplify planning Planning is difficult because of uncertainty Precise location of robot and things around it Accuracy/repeatability of robot actions Adequacy/reliability of sensor data Solution: If can off-load uncertainty handling to low level behaviours, planning becomes much more tractable
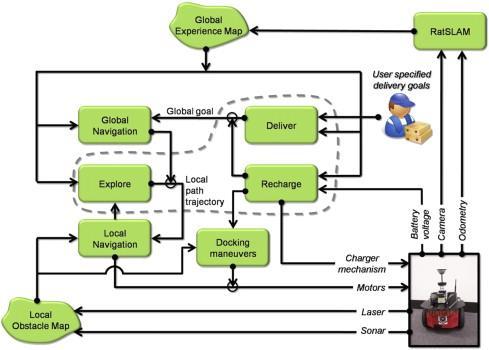
14 Hybrid control for navigation (Milford & Wyeth 2010) Use of low-level immediate sensing to build highlevel map. Effective if same control system is used in both creating and using this world representation. Robot placed in new office building environment, learns map (including its charger location) then makes deliveries continuously operating over two weeks in dynamic environment.
15


16 Milford & Wyeth (2010) Reactive docking procedure (potential field method) relies on assumption that recharge and global navigation have brought robot to suitable starting position Local obstacle avoidance generates safe trajectories, clusters these and takes midpoints. Comparison to trajectory desired by explore or global navigation determines choice of robot action
17 Temporal task decomposition One basic problem with the traditional sense-planact was that planning is slow, and the internal state gets out of synchrony with reality Reactive solution of minimal internal state increases risk of mistakes due to sensor error Solution: Use parallel layers to maintain internal states appropriate to the different speeds of processing
18 Temporal task decomposition Offline/episodic reasoning Map-based path planning 0.01Hz Strategic decisions Real time control Range-sensor based obstacle avoidance PID speed 1 Hz 100Hz
19 Three-layer architecture (Gat 1998) Deliberator utilises past, current and future state Sequencer utilises past and current state Controller depends on current state

20 Also called Three Tier or 3T architecture; used by NASA
21 Three-layer architecture (Gat 1998) Controller: Behaviour library of handcrafted sensorimotor transfer functions (e.g. wall follow with appropriately oriented sonar, servo on distance to wall) Must be fast enough for stable closed loop control Should avoid internal states, or use ephemeral states (e.g. filter sonar by rejecting sudden increases in distance) Internal state should not introduce behavioural discontinuities (these should be new behaviours)
22
23 Three-layer architecture (Gat 1998) Sequencer/Executive: Selects which behaviours are active Not just following fixed sequence but responds to situation in interpreting any plan Does not search into future to decide action Should not take a long time, relative to the environment and the behaviours E.g. in maze, first find wall; then follow it to confirm is wall not obstacle; then remember sequence of turns
24
25 Three-layer architecture (Gat 1998) Deliberator: Does any time consuming computations Typically plans May include complex sensor processing (e.g. vision) Running as separate thread/on separate processor Can either produce a plan for the sequencer, or respond to sequencer requests for deliberation E.g. in maze, compare sequence of turns to stored map; once recognise the location, plan moves to reach exit
26
27 Three-layer architecture (Gat 1998) lines between the components of the three layer architecture can be blurred to accommodate reality If, as seems likely, there is no One True Architecture, and intelligence relies on a hodgepodge of techniques, then the three layer architecture offers itself as a way to help organise the mess
28 Hybrid architectures Most robotic approaches today use some form of hybrid architecture, combining low-level reactivity with higher level reflection, in multiple parallel modules Many variants, and tendency towards hodge-podge solutions in real applications Substantial speed up in planning methods has made it more viable to include within real time control loops Also improvements in sensor algorithms & state estimation methods, so internal models more reliable Example: Stanley, winner of 2005 DARPA Grand Challenge (Thrun et al 2006)
29 Stanley Software Architecture SENSOR INTERFACE PERCEPTION PLANNING&CONTROL USER INTERFACE RDDF database corridor Top level control Touch screen UI Laser 1 interface pause/disable command Wireless E-Stop Laser 2 interface RDDF corridor (smoothed and original) driving mode Laser 3 interface Road finder road center Path planner Laser 4 interface laser map Laser 5 interface Camera interface Laser mapper Vision mapper map vision map trajectory VEHICLE INTERFACE Radar interface GPS position Radar mapper vehicle state (pose, velocity) UKF Pose estimation obstacle list vehicle state Steering control Throttle/brake control Touareg interface Power server interface GPS compass vehicle state (pose, velocity) IMU interface Surface assessment velocity limit Wheel velocity Brake/steering heart beats Linux processes start/stop emergency stop Process controller data health status Health monitor power on/off GLOBAL SERVICES Communication requests Data logger Communication channels File system clocks Inter-process communication (IPC) server Time server
30 References: Arkin, R.C. & Balch, T.R. (1997) AuRA: principles and practice in review. J. Exp. Theor. Artif. Intell. 9(2-3): Arkin, R.C. (2009) Governing lethal behavior: embedding ethics in a hybrid deliberative/reactive control architecture. Tech. Report GIT-GVU Murphy, R.R. (2000) Introduction to AI Robotics MIT Press Gat, E. (1997) On three-layer architectures. In D. Kortenkamp, R. P. Bonnasso, and R. Murphy, editors, Artificial Intelligence and Mobile Robots. MIT/AAAI Press, Milford, M. & Wyatt, G. (2010) Hybrid robot control and SLAM for persistent navigation and mapping. Robotics and Autonomous Systems 58: Thrun, S. et al (2006) Winning the DARPA Grand Challenge, Journal of Field Robotics, 23(9):
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Robot Architectures. Prof. Yanco , Fall 2011
 Robot Architectures Prof. Holly Yanco 91.451 Fall 2011 Architectures, Slide 1 Three Types of Robot Architectures From Murphy 2000 Architectures, Slide 2 Hierarchical Organization is Horizontal From Murphy
Robot Architectures Prof. Holly Yanco 91.451 Fall 2011 Architectures, Slide 1 Three Types of Robot Architectures From Murphy 2000 Architectures, Slide 2 Hierarchical Organization is Horizontal From Murphy
Robot Architectures. Prof. Holly Yanco Spring 2014
 Robot Architectures Prof. Holly Yanco 91.450 Spring 2014 Three Types of Robot Architectures From Murphy 2000 Hierarchical Organization is Horizontal From Murphy 2000 Horizontal Behaviors: Accomplish Steps
Robot Architectures Prof. Holly Yanco 91.450 Spring 2014 Three Types of Robot Architectures From Murphy 2000 Hierarchical Organization is Horizontal From Murphy 2000 Horizontal Behaviors: Accomplish Steps
II. ROBOT SYSTEMS ENGINEERING
 Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9
 Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Visual Navigation for Flying Robots. Welcome
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Organization Tue 10:15-11:45 Lectures, discussions Lecturer: Jürgen Sturm Thu 14:15-15:45 Lab course,
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Organization Tue 10:15-11:45 Lectures, discussions Lecturer: Jürgen Sturm Thu 14:15-15:45 Lab course,
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
A Reactive Robot Architecture with Planning on Demand
 A Reactive Robot Architecture with Planning on Demand Ananth Ranganathan Sven Koenig College of Computing Georgia Institute of Technology Atlanta, GA 30332 {ananth,skoenig}@cc.gatech.edu Abstract In this
A Reactive Robot Architecture with Planning on Demand Ananth Ranganathan Sven Koenig College of Computing Georgia Institute of Technology Atlanta, GA 30332 {ananth,skoenig}@cc.gatech.edu Abstract In this
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Real-time Cooperative Behavior for Tactical Mobile Robot Teams. September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech
 Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Introduction to Robotics
 - Lecture 13 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems July
- Lecture 13 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems July
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Visual Navigation for Flying Robots. Welcome
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Advertisement: Machine Learning for Computer Vision 2 Dr. Rudolph Triebel Computer Vision Group Advertisement:
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Advertisement: Machine Learning for Computer Vision 2 Dr. Rudolph Triebel Computer Vision Group Advertisement:
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Robot control. Devika Subramanian Fall 2008 Comp 140
 Robot control Devika Subramanian Fall 2008 Comp 140 1 Robots 2 The sense-decide-act cycle World Actuators Sensors 3 Sensors for mobile robots Contact sensors bumpers Internal sensors accelerometers gyroscopes
Robot control Devika Subramanian Fall 2008 Comp 140 1 Robots 2 The sense-decide-act cycle World Actuators Sensors 3 Sensors for mobile robots Contact sensors bumpers Internal sensors accelerometers gyroscopes
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Robot Learning by Demonstration using Forward Models of Schema-Based Behaviors
 Robot Learning by Demonstration using Forward Models of Schema-Based Behaviors Adam Olenderski, Monica Nicolescu, Sushil Louis University of Nevada, Reno 1664 N. Virginia St., MS 171, Reno, NV, 89523 {olenders,
Robot Learning by Demonstration using Forward Models of Schema-Based Behaviors Adam Olenderski, Monica Nicolescu, Sushil Louis University of Nevada, Reno 1664 N. Virginia St., MS 171, Reno, NV, 89523 {olenders,
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
A Hybrid Mobile Robot Architecture with Integrated Planning and Control
 A Hybrid Mobile Robot Architecture with Integrated Planning and Control Kian Hsiang Low Inst. Engineering Science National University of Singapore 7 Engineering Drive 1 Singapore 11926, Singapore ieslkh@nus.edu.sg
A Hybrid Mobile Robot Architecture with Integrated Planning and Control Kian Hsiang Low Inst. Engineering Science National University of Singapore 7 Engineering Drive 1 Singapore 11926, Singapore ieslkh@nus.edu.sg
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots
 Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots Yu Zhang and Alan K. Mackworth Department of Computer Science, University of British Columbia, Vancouver B.C. V6T 1Z4, Canada,
Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots Yu Zhang and Alan K. Mackworth Department of Computer Science, University of British Columbia, Vancouver B.C. V6T 1Z4, Canada,
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Cognitive robotics using vision and mapping systems with Soar
 Cognitive robotics using vision and mapping systems with Soar Lyle N. Long, Scott D. Hanford, and Oranuj Janrathitikarn The Pennsylvania State University, University Park, PA USA 16802 ABSTRACT The Cognitive
Cognitive robotics using vision and mapping systems with Soar Lyle N. Long, Scott D. Hanford, and Oranuj Janrathitikarn The Pennsylvania State University, University Park, PA USA 16802 ABSTRACT The Cognitive
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Robotics. Applied artificial intelligence (EDA132) Lecture Elin A. Topp
 Lecture Elin A. Topp") Robotics Applied artificial intelligence (EDA132) Lecture 10 2015-02-20 Elin A. Topp Course book (chapter 25), images & movies from various sources, and original material Images are film characters found
Robotics Applied artificial intelligence (EDA132) Lecture 10 2015-02-20 Elin A. Topp Course book (chapter 25), images & movies from various sources, and original material Images are film characters found
Control Arbitration. Oct 12, 2005 RSS II Una-May O Reilly
 Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION
 ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Incorporating a Software System for Robotics Control and Coordination in Mechatronics Curriculum and Research
 Paper ID #15300 Incorporating a Software System for Robotics Control and Coordination in Mechatronics Curriculum and Research Dr. Maged Mikhail, Purdue University - Calumet Dr. Maged B. Mikhail, Assistant
Paper ID #15300 Incorporating a Software System for Robotics Control and Coordination in Mechatronics Curriculum and Research Dr. Maged Mikhail, Purdue University - Calumet Dr. Maged B. Mikhail, Assistant
NCS Lecture 2 Case Study - Alice. Alice Overview
 NCS Lecture 2 Case Study - Alice Richard M. Murray 17 March 2008 Goals: Provide detailed overview of a a model networked control system Introduce NCS features to be addressed in upcoming lectures Reading:
NCS Lecture 2 Case Study - Alice Richard M. Murray 17 March 2008 Goals: Provide detailed overview of a a model networked control system Introduce NCS features to be addressed in upcoming lectures Reading:
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
Adaptive Multi-Robot Behavior via Learning Momentum
 Adaptive Multi-Robot Behavior via Learning Momentum J. Brian Lee (blee@cc.gatech.edu) Ronald C. Arkin (arkin@cc.gatech.edu) Mobile Robot Laboratory College of Computing Georgia Institute of Technology
Adaptive Multi-Robot Behavior via Learning Momentum J. Brian Lee (blee@cc.gatech.edu) Ronald C. Arkin (arkin@cc.gatech.edu) Mobile Robot Laboratory College of Computing Georgia Institute of Technology
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Hierarchical Controller for Robotic Soccer
 Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Prof. Emil M. Petriu 17 January 2005 CEG 4392 Computer Systems Design Project (Winter 2005)
") Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Robotics and Autonomy. Control of Complex Systems (RMM)
") Robotics and Autonomy Richard M. Murray BE 107, 14 May 2015 Goals: Describe how behavior is implemented in robotic systems (vs biology) Discuss some of the ways that insights in robotics might impact biology
Robotics and Autonomy Richard M. Murray BE 107, 14 May 2015 Goals: Describe how behavior is implemented in robotic systems (vs biology) Discuss some of the ways that insights in robotics might impact biology
AIR FORCE INSTITUTE OF TECHNOLOGY
 Unified Behavior Framework in an Embedded Robot Controller THESIS Stephen S. Lin, Captain, USAF AFIT/GCE/ENG/09-04 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
Unified Behavior Framework in an Embedded Robot Controller THESIS Stephen S. Lin, Captain, USAF AFIT/GCE/ENG/09-04 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
INTELLIGENT WHEELCHAIRS
 INTELLIGENT WHEELCHAIRS Patrick Carrington INTELLWHEELS: MODULAR DEVELOPMENT PLATFORM FOR INTELLIGENT WHEELCHAIRS Rodrigo Braga, Marcelo Petry, Luis Reis, António Moreira INTRODUCTION IntellWheels is a
INTELLIGENT WHEELCHAIRS Patrick Carrington INTELLWHEELS: MODULAR DEVELOPMENT PLATFORM FOR INTELLIGENT WHEELCHAIRS Rodrigo Braga, Marcelo Petry, Luis Reis, António Moreira INTRODUCTION IntellWheels is a
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
and : Principles of Autonomy and Decision Making. Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010
 16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell
 Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell 2004.12.01 Abstract I propose to develop a comprehensive and physically realistic virtual world simulator for use with the Swarthmore Robotics
Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell 2004.12.01 Abstract I propose to develop a comprehensive and physically realistic virtual world simulator for use with the Swarthmore Robotics
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
A Cognitive Architecture for Autonomous Robots
 Advances in Cognitive Systems 2 (2013) 257-275 Submitted 12/2012; published 12/2013 A Cognitive Architecture for Autonomous Robots Adam Haber ADAMH@CSE.UNSW.EDU.AU Claude Sammut CLAUDE@CSE.UNSW.EDU.AU
Advances in Cognitive Systems 2 (2013) 257-275 Submitted 12/2012; published 12/2013 A Cognitive Architecture for Autonomous Robots Adam Haber ADAMH@CSE.UNSW.EDU.AU Claude Sammut CLAUDE@CSE.UNSW.EDU.AU
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
An Agent-Based Architecture for an Adaptive Human-Robot Interface
 An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
A User Friendly Software Framework for Mobile Robot Control
 A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
C-ELROB 2009 Technical Paper Team: University of Oulu
 C-ELROB 2009 Technical Paper Team: University of Oulu Antti Tikanmäki, Juha Röning University of Oulu Intelligent Systems Group Robotics Group sunday@ee.oulu.fi Abstract Robotics Group is a part of Intelligent
C-ELROB 2009 Technical Paper Team: University of Oulu Antti Tikanmäki, Juha Röning University of Oulu Intelligent Systems Group Robotics Group sunday@ee.oulu.fi Abstract Robotics Group is a part of Intelligent
Gilbert Peterson and Diane J. Cook University of Texas at Arlington Box 19015, Arlington, TX
 DFA Learning of Opponent Strategies Gilbert Peterson and Diane J. Cook University of Texas at Arlington Box 19015, Arlington, TX 76019-0015 Email: {gpeterso,cook}@cse.uta.edu Abstract This work studies
DFA Learning of Opponent Strategies Gilbert Peterson and Diane J. Cook University of Texas at Arlington Box 19015, Arlington, TX 76019-0015 Email: {gpeterso,cook}@cse.uta.edu Abstract This work studies
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by