Introduction to Computer Science
|
|
|
- Lindsey Perkins
- 6 years ago
- Views:
Transcription

1 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017

2 Schedule 1
3 Robotics ì Acting on the physical world 2
4 What is robotics? uthe study of the intelligent connection of perception to action [Brady] uoperationally: An intelligent robot is a machine able to extract information from its environment and use knowledge about its world to move safely and perform tasks in a meaningful and purposeful manner 3







5 What makes a robot? Sensors, effectors, locomotion/manipulation system, and an on-board computer system 4
6 What can be sensed? udepends on the sensors on the robot uthe robot exists in its sensor space (all possible values of sensory readings) ualso called perceptual space urobot sensors are very different from biological ones ua roboticist has to try to imagine the world in the robot s sensor space 5
7 State ua sufficient description of the system ucan be: v Observable: robot always knows its state v Hidden/inaccessible/unobservable: robot never knows its state v Partially observable: the robot knows a part of its state v Discrete (e.g., up, down, blue, red) v Continuous (e.g., mph) 6
8 Types of state uexternal state: state of the world v Sensed using the robot s sensors v E.g.: night, day, at-home, sleeping, sunny uinternal state: state of the robot v Sensed using internal sensors v Stored/remembered v E.g.: velocity, mood uthe robot s state is a combination of its external and internal state 7
9 State and intelligence ustate space: all possible states the system can be in ua challenge: sensors do not provide state! v Examples? uhow intelligent a robot appears is strongly dependent on how much it can sense about its environment and about itself 8
10 Internal models uinternal state can be used to remember information about the world (e.g., remember paths to the goal, remember maps, remember friends vs. enemies, etc.) uthis is called a representation or an internal model urepresentations/models have a lot to do with how complicated the control program on the robot needs to be 9
11 Actuators ua robot acts through its actuators (e.g. motors), which typically drive effectors (e.g., wheels) urobotic actuators are very different from biological ones, both are used for: v locomotion (moving around, going places) v manipulation (handling objects) u This divides robotics into two areas v mobile robotics v manipulator robotics 10
12 Actions and behavior ubehavior is what an external observer sees a robot doing. urobots are programmed to display desired behavior. ubehavior is a result of a sequence of robot actions. uobserving behavior may not tell us much about the internal control of a robot. Control can be a black box. 11
13 Autonomy uautonomy is the ability to make one s own decisions and act on them. ufor robots, autonomy means the ability to sense and act on a given situation appropriately. uautonomy can be: v complete (e.g., R2D2) v partial (e.g., tele-operated robots) 12
14 Control urobot control refers to the way in which the sensing and action of a robot are coordinated. uthe many different ways in which robots can be controlled all fall along a well-defined spectrum of control. v Reactive Control: Don t think, (re)act. v Behavior-Based Control: Think the way you act. v Deliberative Control: Think hard, act later. v Hybrid Control: Think & act independently, in parallel. 13
15 Control tradeoffs uthinking is slow ureaction must be fast uthinking enables looking ahead (planning) to avoid bad solutions uthinking too long can be dangerous (e.g., falling off a cliff, being run over) uto think, the robot needs (a lot of) accurate information => world models. 14
16 A historical note: reactive beginnings 15

17 A historical note: Shakey and planning u First general-purpose mobile robot to be able to reason about its own actions u Could analyze each human command and break it down into basic chunks autonomously a planning process u h?v=qxdn6ynwpii 16
18 Where we are today u Boston Dynamics leading robot firm v Specializes in humanoid and similar u 17







19 Robotics today 18
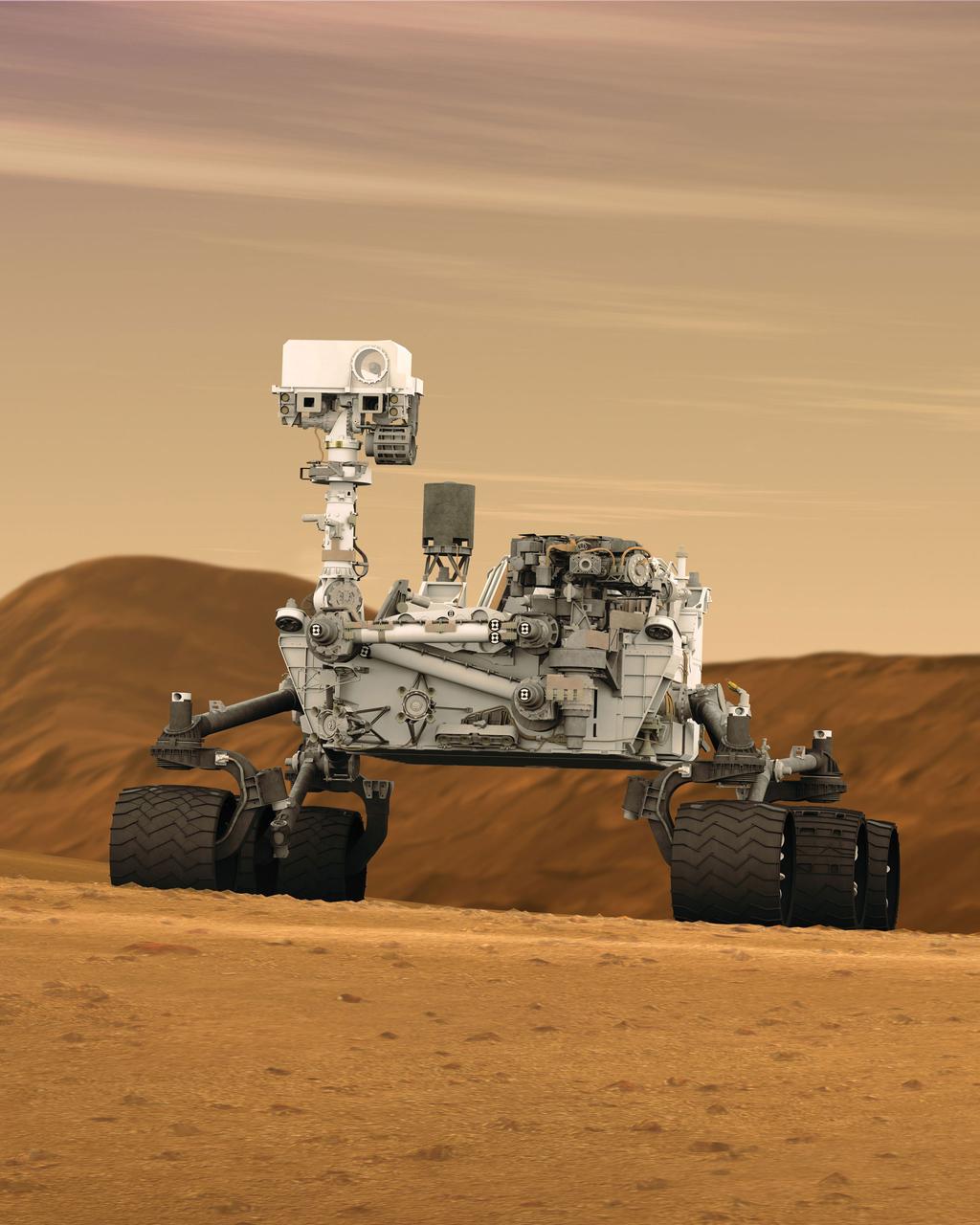
20 Robotics today uhow is the software/control on these organized? v Self-driving car v Industrial robots v Mars rovers v Underwater vehicle uhumanoids near LA v DARPA robotics challenge ( 19




21 Self driving cars 20

22 How many players? u 33 according to CB Insights, Aug 2016 u Could be as many as 100 worldwide 21
23 Sensing on a self-driving car u GPS unit, Inertial navigation system, Laser rangefinders, Radar, Cameras u Position and orientation from GPS + inertial navigation system (localization) u Laser, radar and cameras used to build a threedimensional image of environment (mapping) u Interplay of localization and mapping 22
24 Control u Control is hybrid (mix of deliberative and reactive) u Car maintains an internal map of their world u Uses the map to find an optimal path to destination that avoids obstacles (e.g., pedestrians and other vehicles) from a set of possible paths. u Once the best path is determined, it is broken down into commands, which are fed to the car s actuators. These control the car s steering, braking and throttle 23

25 A typical piece of a map 24
26 Modern approaches tradeoff u How much computation on the car vs. cloud u How much to rely on what is being sensed vs. what is already in the map u How often to update the map u How much to rely on human driver u How much to rely on sensors embedded in the road u How to signal intentions to human drivers u How much to automate the environment (e.g., traffic lights) 25
27 Next week: final review + quiz 26

28 Quiz #7 u 27
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
CORC Exploring Robotics. Unit A: Introduction To Robotics
 CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
HIT3002: Introduction to Artificial Intelligence
 HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS. Santiago Ontañón
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Structure of Intelligent Agents. Examples of Agents 1. Examples of Agents 2. Intelligent Agents and their Environments. An agent:
 Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Intelligent Agents p.1/25. Intelligent Agents. Chapter 2
 Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Inf2D 01: Intelligent Agents and their Environments
 Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Human-robot relation. Human-robot relation
 Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
CS 380: ARTIFICIAL INTELLIGENCE
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
CPS331 Lecture: Intelligent Agents last revised July 25, 2018
 CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
Key-Words: - Neural Networks, Cerebellum, Cerebellar Model Articulation Controller (CMAC), Auto-pilot
, Auto-pilot") erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
CS 486/686 Artificial Intelligence
 CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D.
 Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9
 Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Real-time Cooperative Behavior for Tactical Mobile Robot Teams. September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech
 Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Automation and Mechatronics Engineering Program. Your Path Towards Success
 Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Robotics Evolution: From Production Rate to Human Productivity
 Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
COMP9414/ 9814/ 3411: Artificial Intelligence. Week 2. Classifying AI Tasks
 COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
Course Info. CS 486/686 Artificial Intelligence. Outline. Artificial Intelligence (AI)
") Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Combining Artificial Neural Networks and Symbolic Processing for Autonomous Robot Guidance
 . ~ ~ Engng App/ic. ArliJ. Inrell. Vol. 4. No. 4, pp, 279-285, 1991 Printed in Grcat Bntain. All rights rcscrved OYS~-IY~~/YI $~.o()+o.oo Copyright 01991 Pcrgamon Prcss plc Contributed Paper Combining
. ~ ~ Engng App/ic. ArliJ. Inrell. Vol. 4. No. 4, pp, 279-285, 1991 Printed in Grcat Bntain. All rights rcscrved OYS~-IY~~/YI $~.o()+o.oo Copyright 01991 Pcrgamon Prcss plc Contributed Paper Combining
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Robosemantics: How Stanley the Volkswagen Represents the World
 Minds & Machines (2008) 18:169 178 DOI 10.1007/s11023-008-9098-2 Robosemantics: How Stanley the Volkswagen Represents the World Christopher Parisien Æ Paul Thagard Received: 1 June 2007 / Accepted: 21
Minds & Machines (2008) 18:169 178 DOI 10.1007/s11023-008-9098-2 Robosemantics: How Stanley the Volkswagen Represents the World Christopher Parisien Æ Paul Thagard Received: 1 June 2007 / Accepted: 21
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
SEMI AUTONOMOUS CONTROL OF AN EMERGENCY RESPONSE ROBOT. Josh Levinger, Andreas Hofmann, Daniel Theobald
 SEMI AUTONOMOUS CONTROL OF AN EMERGENCY RESPONSE ROBOT Josh Levinger, Andreas Hofmann, Daniel Theobald Vecna Technologies, 36 Cambridgepark Drive, Cambridge, MA, 02140, Tel: 617.864.0636 Fax: 617.864.0638
SEMI AUTONOMOUS CONTROL OF AN EMERGENCY RESPONSE ROBOT Josh Levinger, Andreas Hofmann, Daniel Theobald Vecna Technologies, 36 Cambridgepark Drive, Cambridge, MA, 02140, Tel: 617.864.0636 Fax: 617.864.0638
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Administrivia. CS 188: Artificial Intelligence Spring Agents and Environments. Today. Vacuum-Cleaner World. A Reflex Vacuum-Cleaner
 CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard