Building Perceptive Robots with INTEL Euclid Development kit
|
|
|
- Christian Flynn
- 5 years ago
- Views:
Transcription

1 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation







2 2 2


3 3



4 A modern robot should Perform a task Find its way in our world and move safely Understand the environment and adapt to it Interact (naturally) 4

5 Hi Fred, Water the flowers for me please. Intel


6 Robot Scene Understanding Intel




7 Intel Robot Scene Understanding Human Recognition Indoor navigation Obstacle identification Object Recognition
8 Human Robot Interaction Intel



")

9 Intel Hi Fred, Water the flowers for me please. Speech Recognition Human Robot Interaction Emotion Recognition Speech (text to speech) Humanoid Behavior Gesture Recognition Intent Understanding
10 Intel Robot Scene Understanding Human Robot Interaction Human Recognition Speech Recognition Speech (text to speech) Obstacle identification Indoor navigation Object Recognition Gesture Recognition Emotion Recognition Intent Understanding Humanoid Behavior


11 Intel Robotics capabilities Sensing and perception Human-robot interaction Task execution Mechanics System engineering Legend: Perception needed Relative position and velocity estimation Semantic understanding 3D perception Object recognition Object classification Scene understanding Sensor fusion Sensing materials Sources: NASA; eurobotics; internal analysis. Multi-modal interaction Relating over time (Know Me) Social interaction Emotion recognition Human activity recognition Intent recognition Meaningful expression Safe interaction User-aware design Dynamic and compliant control Task and motion planning Navigation, mapping, and localization Multi-agent coordination Automatic feedback and adaptation Training and skill acquisition Cost efficient arms and grippers Real-time reaction and replanning Modeling contact dynamics Cost efficient actuators Object Manipulation Inherently safe mechanics Locomotion System integration Serviceability and error recovery Modularity and interoperability Verification and validation Power-efficient computing Learning and data management Cooperative robot networks Security Privacy


12 Perception is in the heart of modern robotics Unstructured Environment Dynamic and changing environment Perception Multi Robot collaboration Operate around and with Humans Learn and adapt to new situations 12
13 Intel RealSense Robotics Innovation Support roboticists in their quest to innovate and create the next big thing in robotics 13
14 14


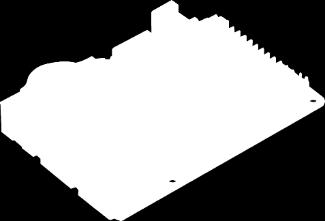
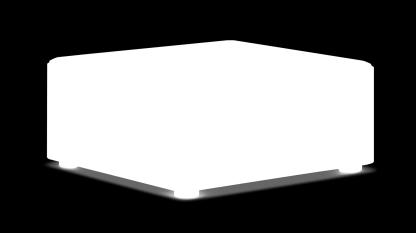
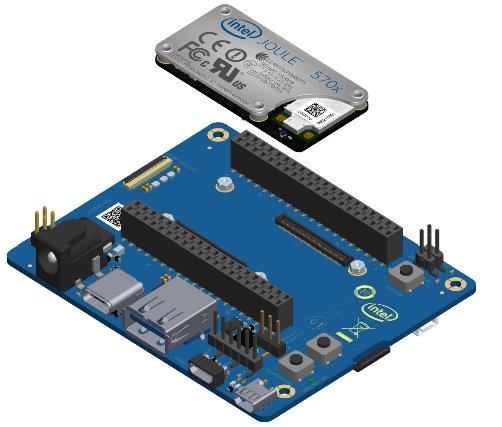
15 Intel Euclid Development Kit. *The product, product specifications and data may be subject to change without notice 15
16 Intel Euclid - Highlights Roboticist/Makers vision solution Complete Standard/Community Easy to use/ zero-installation *The product, product specifications and data may be subject to change without notice 16 16




17 Intel Euclid - Highlights Environmental Sensors Audio: Mics, Speaker Detachable Battery Soft buttons ZR300 (Depth & Motion) Intel Atom Quad-Core SOC Coms: WiFi, BT, USB3, UART, HDMI Roboticist/Makers vision solution Complete Standard/Community Easy to use/ zero-installation *The product, product specifications and data may be subject to change without notice Internal Storage Memory 17 Disclaimer THE PRODUCT, PRODUCT SPECIFICATIONS AND DATA MAY BE SUBJECT TO CHANGE WITHOUT NOTICE 17
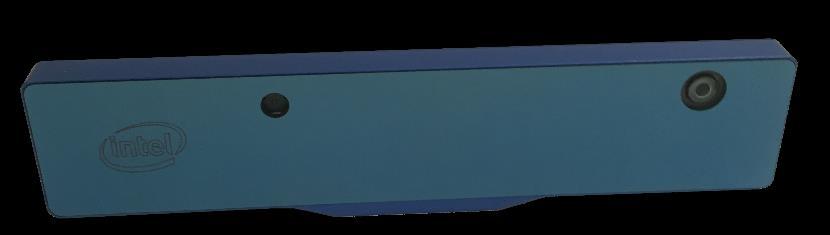
18 Intel Euclid - Highlights Tracking Module - Color - RGB Stream FOV (D x V x H) 2MP, Up to 30fps, 16:9, rolling shutter, fixed focus 75 x 41.5 x 68 Fisheye Stream 30 fps FOV (D V H): IMU - 3-axis accel. Time Stamp: 50 μsec accuracy & 3-axis gyro. Depth - Active IR Stereo Roboticist/Makers vision solution Complete Standard/Community Easy to use/ zero-installation Depth Stream Depth Output Format Range Stereo Imagers FOV (D x V x H) *The product, product specifications and data may be subject to change without notice Up to fps, global shutter 16-bit 0.5m (480x360) - 4m (Varies depending on light conditions) 70 x 46 x



19 Intel Euclid - Highlights Person Library SLAM Library Object Library Roboticist/Makers vision solution Complete Standard/Community Easy to use/ zero-installation *The product, product specifications and data may be subject to change without notice 19




20 Intel Euclid - Highlights * * Roboticist/Makers vision solution Complete Standard/Community Easy to use/ zero-installation *The product, product specifications and data may be subject to change without notice *




21 Intel Euclid - Highlights Roboticist/Makers vision solution Complete Standard/Community Easy to use/ zero-installation *The product, product specifications and data may be subject to change without notice 21 21



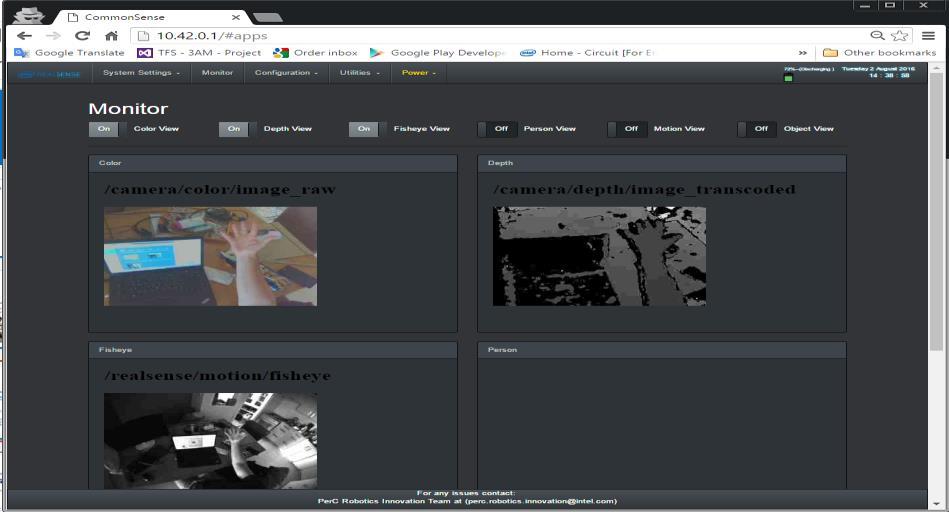
22 Intel Euclid - C&C Web interface Scenarios Dynamic Reconfigure ROS nodes configuration standard *The product, product specifications and data may be subject to change without notice 22 22


23 Intel Euclid Development Kit. *The product, product specifications and data may be subject to change without notice 23
24
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Safe Human-Robot Co-Existence
 Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
What was the first gestural interface?
 stanford hci group / cs247 Human-Computer Interaction Design Studio What was the first gestural interface? 15 January 2013 http://cs247.stanford.edu Theremin Myron Krueger 1 Myron Krueger There were things
stanford hci group / cs247 Human-Computer Interaction Design Studio What was the first gestural interface? 15 January 2013 http://cs247.stanford.edu Theremin Myron Krueger 1 Myron Krueger There were things
Advancing Autonomy on Man Portable Robots. Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008
 Advancing Autonomy on Man Portable Robots Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Advancing Autonomy on Man Portable Robots Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
KMUTT Kickers: Team Description Paper
 KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
TOUCH & FEEL VIRTUAL REALITY. DEVELOPMENT KIT - VERSION NOVEMBER 2017
 TOUCH & FEEL VIRTUAL REALITY DEVELOPMENT KIT - VERSION 1.1 - NOVEMBER 2017 www.neurodigital.es Minimum System Specs Operating System Windows 8.1 or newer Processor AMD Phenom II or Intel Core i3 processor
TOUCH & FEEL VIRTUAL REALITY DEVELOPMENT KIT - VERSION 1.1 - NOVEMBER 2017 www.neurodigital.es Minimum System Specs Operating System Windows 8.1 or newer Processor AMD Phenom II or Intel Core i3 processor
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Touch & Gesture. HCID 520 User Interface Software & Technology
 Touch & Gesture HCID 520 User Interface Software & Technology What was the first gestural interface? Myron Krueger There were things I resented about computers. Myron Krueger There were things I resented
Touch & Gesture HCID 520 User Interface Software & Technology What was the first gestural interface? Myron Krueger There were things I resented about computers. Myron Krueger There were things I resented
Space Robotic Capabilities David Kortenkamp (NASA Johnson Space Center)
") Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
AAU SUMMER SCHOOL PROGRAMMING SOCIAL ROBOTS FOR HUMAN INTERACTION LECTURE 10 MULTIMODAL HUMAN-ROBOT INTERACTION
 AAU SUMMER SCHOOL PROGRAMMING SOCIAL ROBOTS FOR HUMAN INTERACTION LECTURE 10 MULTIMODAL HUMAN-ROBOT INTERACTION COURSE OUTLINE 1. Introduction to Robot Operating System (ROS) 2. Introduction to isociobot
AAU SUMMER SCHOOL PROGRAMMING SOCIAL ROBOTS FOR HUMAN INTERACTION LECTURE 10 MULTIMODAL HUMAN-ROBOT INTERACTION COURSE OUTLINE 1. Introduction to Robot Operating System (ROS) 2. Introduction to isociobot
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Hanuman KMUTT: Team Description Paper
 Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Comau AURA - Advanced Use Robotic Arm AURA. Soft as a Human Touch
 AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AURA Soft as a Human Touch
 The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
GESTURE BASED HUMAN MULTI-ROBOT INTERACTION. Gerard Canal, Cecilio Angulo, and Sergio Escalera
 GESTURE BASED HUMAN MULTI-ROBOT INTERACTION Gerard Canal, Cecilio Angulo, and Sergio Escalera Gesture based Human Multi-Robot Interaction Gerard Canal Camprodon 2/27 Introduction Nowadays robots are able
GESTURE BASED HUMAN MULTI-ROBOT INTERACTION Gerard Canal, Cecilio Angulo, and Sergio Escalera Gesture based Human Multi-Robot Interaction Gerard Canal Camprodon 2/27 Introduction Nowadays robots are able
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Team Description
 NimbRo@Home 2014 Team Description Max Schwarz, Jörg Stückler, David Droeschel, Kathrin Gräve, Dirk Holz, Michael Schreiber, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science
NimbRo@Home 2014 Team Description Max Schwarz, Jörg Stückler, David Droeschel, Kathrin Gräve, Dirk Holz, Michael Schreiber, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION
 PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
CPE Lyon Robot Forum, 2016 Team Description Paper
 CPE Lyon Robot Forum, 2016 Team Description Paper Raphael Leber, Jacques Saraydaryan, Fabrice Jumel, Kathrin Evers, and Thibault Vouillon [CPE Lyon, University of Lyon], http://www.cpe.fr/?lang=en, http://cpe-dev.fr/robotcup/
CPE Lyon Robot Forum, 2016 Team Description Paper Raphael Leber, Jacques Saraydaryan, Fabrice Jumel, Kathrin Evers, and Thibault Vouillon [CPE Lyon, University of Lyon], http://www.cpe.fr/?lang=en, http://cpe-dev.fr/robotcup/
Prof. Subramanian Ramamoorthy. The University of Edinburgh, Reader at the School of Informatics
 Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
PSU Centaur Hexapod Project
 PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining
PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
Touch & Gesture. HCID 520 User Interface Software & Technology
 Touch & Gesture HCID 520 User Interface Software & Technology Natural User Interfaces What was the first gestural interface? Myron Krueger There were things I resented about computers. Myron Krueger
Touch & Gesture HCID 520 User Interface Software & Technology Natural User Interfaces What was the first gestural interface? Myron Krueger There were things I resented about computers. Myron Krueger
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
HMD based VR Service Framework. July Web3D Consortium Kwan-Hee Yoo Chungbuk National University
 HMD based VR Service Framework July 31 2017 Web3D Consortium Kwan-Hee Yoo Chungbuk National University khyoo@chungbuk.ac.kr What is Virtual Reality? Making an electronic world seem real and interactive
HMD based VR Service Framework July 31 2017 Web3D Consortium Kwan-Hee Yoo Chungbuk National University khyoo@chungbuk.ac.kr What is Virtual Reality? Making an electronic world seem real and interactive
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
SPL 2017 Team Description Paper
 Hibikino-Musashi@Home SPL 2017 Team Description Paper Sansei Hori, Yutaro Ishida, Yuta Kiyama, Yuichiro Tanaka, Yuki Kuroda, Masataka Hisano, Yuto Imamura, Tomotaka Himaki, Yuma Yoshimoto, Yoshiya Aratani,
Hibikino-Musashi@Home SPL 2017 Team Description Paper Sansei Hori, Yutaro Ishida, Yuta Kiyama, Yuichiro Tanaka, Yuki Kuroda, Masataka Hisano, Yuto Imamura, Tomotaka Himaki, Yuma Yoshimoto, Yoshiya Aratani,
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
Hopper Spacecraft Simulator. Billy Hau and Brian Wisniewski
 Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works Introduction Mission Overview Collaboration with Penn
Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works Introduction Mission Overview Collaboration with Penn
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
TurtleBot2&ROS - Learning TB2
 TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
REBO: A LIFE-LIKE UNIVERSAL REMOTE CONTROL
 World Automation Congress 2010 TSI Press. REBO: A LIFE-LIKE UNIVERSAL REMOTE CONTROL SEIJI YAMADA *1 AND KAZUKI KOBAYASHI *2 *1 National Institute of Informatics / The Graduate University for Advanced
World Automation Congress 2010 TSI Press. REBO: A LIFE-LIKE UNIVERSAL REMOTE CONTROL SEIJI YAMADA *1 AND KAZUKI KOBAYASHI *2 *1 National Institute of Informatics / The Graduate University for Advanced
Topic identification through sentiment analysis
 Progetti di Sistemi Intelligenti Alberto Borghese Università degli Studi di Milano Laboratorio di Sistemi Intelligenti Applicati (AIS-Lab) Dipartimento di Informatica alberto.borghese@unimi.it 1/16 Topic
Progetti di Sistemi Intelligenti Alberto Borghese Università degli Studi di Milano Laboratorio di Sistemi Intelligenti Applicati (AIS-Lab) Dipartimento di Informatica alberto.borghese@unimi.it 1/16 Topic
Controlling Humanoid Robot Using Head Movements
 Volume-5, Issue-2, April-2015 International Journal of Engineering and Management Research Page Number: 648-652 Controlling Humanoid Robot Using Head Movements S. Mounica 1, A. Naga bhavani 2, Namani.Niharika
Volume-5, Issue-2, April-2015 International Journal of Engineering and Management Research Page Number: 648-652 Controlling Humanoid Robot Using Head Movements S. Mounica 1, A. Naga bhavani 2, Namani.Niharika
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
VR in TSD. Frank Bahrmann Andre Minz Sven Hellbach Hans-Joachim Böhme. HTW Dresden - Artificial Intelligence Lab. 26th November 2016
 VR in TSD HTW Dresden - Artificial Intelligence Lab Frank Bahrmann Andre Minz Sven Hellbach Hans-Joachim Böhme 26th November 2016 Agenda F. Bahrmann VR in TSD 2 / 15 Current Workflow Current Workflow Current
VR in TSD HTW Dresden - Artificial Intelligence Lab Frank Bahrmann Andre Minz Sven Hellbach Hans-Joachim Böhme 26th November 2016 Agenda F. Bahrmann VR in TSD 2 / 15 Current Workflow Current Workflow Current
1 Abstract and Motivation
 1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments
 Book Title Book Editors IOS Press, 2003 1 HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments Tetsunari Inamura a,1, Masayuki Inaba a and Hirochika Inoue a a Dept. of
Book Title Book Editors IOS Press, 2003 1 HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments Tetsunari Inamura a,1, Masayuki Inaba a and Hirochika Inoue a a Dept. of
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Knowledge Representation and Cognition in Natural Language Processing
 Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perceptual Interfaces. Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces
 and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces") Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Towards Complex Human Robot Cooperation Based on Gesture-Controlled Autonomous Navigation
 CHAPTER 1 Towards Complex Human Robot Cooperation Based on Gesture-Controlled Autonomous Navigation J. DE LEÓN 1 and M. A. GARZÓN 1 and D. A. GARZÓN 1 and J. DEL CERRO 1 and A. BARRIENTOS 1 1 Centro de
CHAPTER 1 Towards Complex Human Robot Cooperation Based on Gesture-Controlled Autonomous Navigation J. DE LEÓN 1 and M. A. GARZÓN 1 and D. A. GARZÓN 1 and J. DEL CERRO 1 and A. BARRIENTOS 1 1 Centro de
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Open Source Voices Interview Series Podcast, Episode 03: How Is Open Source Important to the Future of Robotics? English Transcript
 [Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
[Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
U ROBOT March 12, 2008 Kyung Chul Shin Yujin Robot Co.
 U ROBOT March 12, 2008 Kyung Chul Shin Yujin Robot Co. Is the era of the robot around the corner? It is coming slowly albeit steadily hundred million 1600 1400 1200 1000 Public Service Educational Service
U ROBOT March 12, 2008 Kyung Chul Shin Yujin Robot Co. Is the era of the robot around the corner? It is coming slowly albeit steadily hundred million 1600 1400 1200 1000 Public Service Educational Service
3D Interaction using Hand Motion Tracking. Srinath Sridhar Antti Oulasvirta
 3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Ambient functionality : human interfaces for the digital life
 Enseignement et Recherche au service de la Société de l Information Ambient functionality : human interfaces for the digital life Digital technologies are disruptive Creators Experts Contents Users Author
Enseignement et Recherche au service de la Société de l Information Ambient functionality : human interfaces for the digital life Digital technologies are disruptive Creators Experts Contents Users Author
Progress on URUS: Ubiquitous Networking Robots in Urban Settings
 Progress on URUS: Ubiquitous Networking Robots in Urban Settings Prof. Alberto Sanfeliu Instituto de Robótica (IRI) (CSIC-UPC) Technical University of Catalonia October 29th, 2007 http://www-iri-upc.es/groups/lrobots
Progress on URUS: Ubiquitous Networking Robots in Urban Settings Prof. Alberto Sanfeliu Instituto de Robótica (IRI) (CSIC-UPC) Technical University of Catalonia October 29th, 2007 http://www-iri-upc.es/groups/lrobots