PSU Centaur Hexapod Project
|
|
|
- Hilary Hicks
- 6 years ago
- Views:
Transcription
1 PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining methods Imitation and Interaction Use FPGAs and FPAAs Use faculty expertise High-school, undergraduate, graduate classes External collaborations with top groups
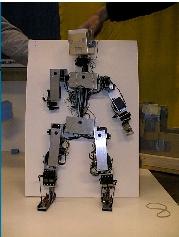
2 What we have? 1. Lower body (motors too weak) 2. Torso (no hands) 3. Head (no cameras yet) 4. Image Processing, Obstacle avoiding, navigation and planning from PSUBOT (not yet connected) 5. Speech analysis and synthesis software (from OGI) 6. Planning and obstacle avoiding software (separately developed) 7. Natural language conversation with text-to-speech 8. Machine Learning software (Grygiel, Files, Mishchenko) 9. Close collaboration with three top world researchers in robotics
3 Computer Vision PCB/FPGA Design Hall,Perkowski Xubo,Jabri, Hammerstrom Reinforcement Learning IC Design Song,Jeske,Perkowski Massey Neural Nets Lendaris Motor control DNF, Decision Trees, etc logic methods Song, Jeske,Mishchenko, Perkowski Decomposition Mishchenko, Perkowski Fuzzy Logic Lendaris, Perkowski Humanoid Robot Centaur Hexapod Game Theory Zwick Evolutionary Programming Greenwood Robot Mechanics Buller,DeGaris Tymerski Speech Synthesis and Analysis Hermansky and OGI Zielinska,Lentz, Barney,Wern Humanoid Robotics Project
4 Learning in Humanoid Robotics, as exemplified by Centaur Human faces Facial, hand, body gestures Own body movements - walk Own body movements - grasp learning Body Motors Smell actuators Music Synthesis Speaker - sound Own body movements - make faces Speech with emotion Natural language syntax Neural Nets Decomposition Fuzzy Logic Evolutionary Programming Reinforcement Learning DNF, Decision Trees, etc
5 Hardware Architecture of PSU s Hexapod Centaur Left eye TV camera Bi-Directional Radio sonar sonar Right eye TV camera Laser scanner Touch sensors Touch sensors PC laptop computer STAMP microcontroller Infrared sensors Infrared sensors Movement FPGAs Force sensors microphones microphones Speech and Music System with Analog FPGAs gyroscopes Smell actuators Music Synthesis Speaker PC network Super Joysticks TV screens Servo Controllers Servo Controllers Servo Controllers Servo Controllers Servo Controllers Servo Controllers Body Motors
6 Software Architecture of PSU s Hexapod Centaur Processing of sensor information Speech Analysis Visual Image Processing and Feature Extraction Sonar DSP and extraction Sensor integration Behavior Planning Library of high level behaviors Bi-Directional Radio Behavior execution Speech and Music Generation Smell synthesis Library of low level behaviors Servo Controllers Servo Controllers Servo Controllers Servo Controllers Servo Controllers Low level movement controls
7 Faster!! World Model MUVAL architecture Dual Trace Syntha Image Processing Mvgud Lotus FPGA programming Image Acquisition camera State machines Robot knowledge sensors
8 Hexapod I control - phase one stamp
9 Hexapod I control - phase two PC stamp radio radio
10 Hexapod I control - phase three camera radio radio Image grabber PC stamp radio radio

11 camera camera radio Hexapod I control - phase five: supercomputer radio DEC PERLE Universal Logic Machine DecStation stamp radio radio Turbochannel

12 Future work... Light weight! Robot Puppet Theatre Humanoid robot in human theatre - Faithful Robot by Stanislaw Lem
13 You can help... Robotics and Automation IEEE Society - the only student chapter in Oregon Go recruit to high schools Help to build one of our robots Perform in our theatre as radio-operator Classes in robotics and projects M.S. and Ph.D. theses Capstone Projects

14 Building a head
 5. Make a latex mask of your face 6. Put the mask on the skull 7.")
15 Clone your head in 8 easy steps 1. Cut the skull from playwood or plastic 2. Glue in the servos 3. Connect servos to interface 4. Program for your head movements (use ready C++ interface or Basic interface) 5. Make a latex mask of your face 6. Put the mask on the skull 7. Record your voice 8. Synchronize

16 Who will be cloned first? Dr. Hall Dr. Lendaris Dr. Greenwood Dr. Mishchenko Mrs. Jady Bates Dr. Perkowski

17 How to animate limbs?

18 Goboy In 1992, Garvey initiated a form of humorous, non-violent guerrilla warfare against the so-called artworld, playground of the paranoid, narcissistic and vacuous rich. He unleashed his robot panhandler Goboy on places of institutional power such as museums, symphony halls, opera houses and shopping malls, and videotaped the astonishing results. These records of the notorious unannounced (and most-times unwelcome) visits of Omnicircus robots have become legendary comic critiques of our triviabesotten times.

19 This is Slave Zero, a halfscale robotic actor with 21 servo actuators & 42 degrees of freedom. Designed and built by Carl Pisaturo in , shown here with sculpted body panels by Frank Garvey. She and a mate are blurring the boundaries between sculpture, dance and theater while extending the language of each.
20 Prototype of future walking robot We take ideas from Honda, Elvis and several other robots
21
22 Specifics Inexpensive techniques PC + micro-controllers + FPGA/FPAA boards for Lattice Corporation R/C servos Serial communication Standard Intel Cameras 3-D mouse for balance A mixture of Lisp and Visual C++

23 Control Architecture Reasoning Model Building Reactive Control Differs from human
24 Senses Vision Hearing Balance Pressure sensors (Cannot smell and taste..:)
25 Experiments Balance Walking Navigation Hearing Vision Manipulation Planning

26 Experimental set-up of Elvis

27 Give me a hand...

28 Hand..two fingers and a thumb...

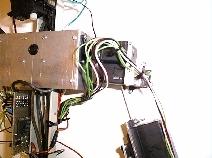
29 Controller card on leg
30 Foot
31 Balance Two Electronic Gyros (From 3-D mouse)

32 Knee

33 Head and ears:
34 Shoulder

35 Hip and arm

36 Controller card Own construction Controls 8 servos Read 8 A/D ports Serial communication Cascade serial bus Can close servos down
37 Experiments Balance (First experiments performed) Hearing (Direction of sound) Vision (3-D Map) Planning (Path planning)
38 Building humanoid robots is tough but it can be done in University environment We plan to accomplish several tasks from very simple to very complicated High school students, hobbyists, undergraduate and graduate students, visiting specialists and faculty will be working arm-by-arm to accomplish practical goals.
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
OREGON CYBER THEATRE. Marek Perkowski
 OREGON CYBER THEATRE Marek Perkowski MAIN THESES All existing Brain/Robot/Human theories such as symbol manipulation or evolutionary computing are no more than powerful metaphors. New Metaphors for Intelligent
OREGON CYBER THEATRE Marek Perkowski MAIN THESES All existing Brain/Robot/Human theories such as symbol manipulation or evolutionary computing are no more than powerful metaphors. New Metaphors for Intelligent
A New Approach to Robot s Imitation of Behaviors by Decomposition of Multiple-Valued Relations
 A New Approach to Robot s Imitation of Behaviors by Decomposition of Multiple-Valued Relations Uland Wong and Marek Perkowski Department of Electrical and Computer Engineering, Portland State University
A New Approach to Robot s Imitation of Behaviors by Decomposition of Multiple-Valued Relations Uland Wong and Marek Perkowski Department of Electrical and Computer Engineering, Portland State University
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
ROBOTICS & EMBEDDED SYSTEMS
 ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
SPY ROBOT CONTROLLING THROUGH ZIGBEE USING MATLAB
 SPY ROBOT CONTROLLING THROUGH ZIGBEE USING MATLAB MD.SHABEENA BEGUM, P.KOTESWARA RAO Assistant Professor, SRKIT, Enikepadu, Vijayawada ABSTRACT In today s world, in almost all sectors, most of the work
SPY ROBOT CONTROLLING THROUGH ZIGBEE USING MATLAB MD.SHABEENA BEGUM, P.KOTESWARA RAO Assistant Professor, SRKIT, Enikepadu, Vijayawada ABSTRACT In today s world, in almost all sectors, most of the work
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Modern Robotics with OpenCV. Widodo Budiharto
 Modern Robotics with OpenCV Widodo Budiharto Science Publishing Group 548 Fashion Avenue New York, NY 10018 Published by Science Publishing Group 2014 Copyright Widodo Budiharto 2014 All rights reserved.
Modern Robotics with OpenCV Widodo Budiharto Science Publishing Group 548 Fashion Avenue New York, NY 10018 Published by Science Publishing Group 2014 Copyright Widodo Budiharto 2014 All rights reserved.
A*STAR Unveils Singapore s First Social Robots at Robocup2010
 MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Advanced Distributed Architecture for a Small Biped Robot Control M. Albero, F. Blanes, G. Benet, J.E. Simó, J. Coronel
 Advanced Distributed Architecture for a Small Biped Robot Control M. Albero, F. Blanes, G. Benet, J.E. Simó, J. Coronel Departamento de Informática de Sistemas y Computadores. (DISCA) Universidad Politécnica
Advanced Distributed Architecture for a Small Biped Robot Control M. Albero, F. Blanes, G. Benet, J.E. Simó, J. Coronel Departamento de Informática de Sistemas y Computadores. (DISCA) Universidad Politécnica
Realization of Humanoid Robot Playing Golf
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 6 Special issue with selection of extended papers from 6th International Conference on Logistic, Informatics and Service
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 6 Special issue with selection of extended papers from 6th International Conference on Logistic, Informatics and Service
REPORT NUMBER 3500 John A. Merritt Blvd. Nashville, TN
 REPORT DOCUMENTATION PAGE Form Apprved ous Wo 0704-018 1,,If w to1ii~ b I It smcm;7 Itw-xE, ~ ira.;, v ý ý 75sc It i - - PLEASE DO NOT RETURN YOUR FORM TO THE ABOVE ADDRESS. 1. REPORT DATE (DD.MM-YYYV)
REPORT DOCUMENTATION PAGE Form Apprved ous Wo 0704-018 1,,If w to1ii~ b I It smcm;7 Itw-xE, ~ ira.;, v ý ý 75sc It i - - PLEASE DO NOT RETURN YOUR FORM TO THE ABOVE ADDRESS. 1. REPORT DATE (DD.MM-YYYV)
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Use of Machine Learning based on Constructive Induction in Dialogs with Robotic Heads
 Proceedings of the ICORR 2003(The Eighth International Conference on Rehabilitation Robotics), 22-25 April 2003 Use of Machine Learning based on Constructive Induction in Dialogs with Robotic Heads Marek
Proceedings of the ICORR 2003(The Eighth International Conference on Rehabilitation Robotics), 22-25 April 2003 Use of Machine Learning based on Constructive Induction in Dialogs with Robotic Heads Marek
A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES
 A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES THAIR A. SALIH, OMAR IBRAHIM YEHEA COMPUTER DEPT. TECHNICAL COLLEGE/ MOSUL EMAIL: ENG_OMAR87@YAHOO.COM, THAIRALI59@YAHOO.COM ABSTRACT It is difficult to find
A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES THAIR A. SALIH, OMAR IBRAHIM YEHEA COMPUTER DEPT. TECHNICAL COLLEGE/ MOSUL EMAIL: ENG_OMAR87@YAHOO.COM, THAIRALI59@YAHOO.COM ABSTRACT It is difficult to find
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Cost Oriented Humanoid Robots
 Cost Oriented Humanoid Robots P.Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien (Tel:++43 1 58801 31800, e-mail: kopacek@ihrt.tuwien.ac.at)
Cost Oriented Humanoid Robots P.Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien (Tel:++43 1 58801 31800, e-mail: kopacek@ihrt.tuwien.ac.at)
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Implementing Physical Capabilities for an Existing Chatbot by Using a Repurposed Animatronic to Synchronize Motor Positioning with Speech
 Implementing Physical Capabilities for an Existing Chatbot by Using a Repurposed Animatronic to Synchronize Motor Positioning with Speech Alex Johnson, Tyler Roush, Mitchell Fulton, Anthony Reese Kent
Implementing Physical Capabilities for an Existing Chatbot by Using a Repurposed Animatronic to Synchronize Motor Positioning with Speech Alex Johnson, Tyler Roush, Mitchell Fulton, Anthony Reese Kent
VOICE CONTROL BASED PROSTHETIC HUMAN ARM
 VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Fabrication of the kinect remote-controlled cars and planning of the motion interaction courses
 Available online at www.sciencedirect.com ScienceDirect Procedia - Social and Behavioral Sciences 174 ( 2015 ) 3102 3107 INTE 2014 Fabrication of the kinect remote-controlled cars and planning of the motion
Available online at www.sciencedirect.com ScienceDirect Procedia - Social and Behavioral Sciences 174 ( 2015 ) 3102 3107 INTE 2014 Fabrication of the kinect remote-controlled cars and planning of the motion
1 Introduction. 2 Embedded Electronics Primer. 2.1 The Arduino
 Beginning Embedded Electronics for Botballers Using the Arduino Matthew Thompson Allen D. Nease High School matthewbot@gmail.com 1 Introduction Robotics is a unique and multidisciplinary field, where successful
Beginning Embedded Electronics for Botballers Using the Arduino Matthew Thompson Allen D. Nease High School matthewbot@gmail.com 1 Introduction Robotics is a unique and multidisciplinary field, where successful
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory GetMAD Final Report
 Date: 12/8/2009 Student Name: Sarfaraz Suleman TA s: Thomas Vermeer Mike Pridgen Instuctors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering
Date: 12/8/2009 Student Name: Sarfaraz Suleman TA s: Thomas Vermeer Mike Pridgen Instuctors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
A User Friendly Software Framework for Mobile Robot Control
 A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING
 HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING K.Gopal, Dr.N.Suthanthira Vanitha, M.Jagadeeshraja, and L.Manivannan, Knowledge Institute of Technology Abstract: - The advancement
HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING K.Gopal, Dr.N.Suthanthira Vanitha, M.Jagadeeshraja, and L.Manivannan, Knowledge Institute of Technology Abstract: - The advancement
Cost Oriented Humanoid Robots
 Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
DSP VLSI Design. DSP Systems. Byungin Moon. Yonsei University
 Byungin Moon Yonsei University Outline What is a DSP system? Why is important DSP? Advantages of DSP systems over analog systems Example DSP applications Characteristics of DSP systems Sample rates Clock
Byungin Moon Yonsei University Outline What is a DSP system? Why is important DSP? Advantages of DSP systems over analog systems Example DSP applications Characteristics of DSP systems Sample rates Clock
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT
 DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT Ranjani.R, M.Nandhini, G.Madhumitha Assistant Professor,Department of Mechatronics, SRM University,Kattankulathur,Chennai. ABSTRACT Library robot is an
DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT Ranjani.R, M.Nandhini, G.Madhumitha Assistant Professor,Department of Mechatronics, SRM University,Kattankulathur,Chennai. ABSTRACT Library robot is an
Abstract. 1. Introduction
 Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Initial Report on Wheelesley: A Robotic Wheelchair System
 Initial Report on Wheelesley: A Robotic Wheelchair System Holly A. Yanco *, Anna Hazel, Alison Peacock, Suzanna Smith, and Harriet Wintermute Department of Computer Science Wellesley College Wellesley,
Initial Report on Wheelesley: A Robotic Wheelchair System Holly A. Yanco *, Anna Hazel, Alison Peacock, Suzanna Smith, and Harriet Wintermute Department of Computer Science Wellesley College Wellesley,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Development of Running Robot Based on Charge Coupled Device
 Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette
 Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Electrical Engineering Electrical Engineering Electrical Engineering Electrical Engineering Contents 1 2 3 4 5 6 7 8 9 Motivation
Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Electrical Engineering Electrical Engineering Electrical Engineering Electrical Engineering Contents 1 2 3 4 5 6 7 8 9 Motivation
Controlling Humanoid Robot Using Head Movements
 Volume-5, Issue-2, April-2015 International Journal of Engineering and Management Research Page Number: 648-652 Controlling Humanoid Robot Using Head Movements S. Mounica 1, A. Naga bhavani 2, Namani.Niharika
Volume-5, Issue-2, April-2015 International Journal of Engineering and Management Research Page Number: 648-652 Controlling Humanoid Robot Using Head Movements S. Mounica 1, A. Naga bhavani 2, Namani.Niharika
Tele-Operated Anthropomorphic Arm and Hand Design
 Tele-Operated Anthropomorphic Arm and Hand Design Namal A. Senanayake, Khoo B. How, and Quah W. Wai Abstract In this project, a tele-operated anthropomorphic robotic arm and hand is designed and built
Tele-Operated Anthropomorphic Arm and Hand Design Namal A. Senanayake, Khoo B. How, and Quah W. Wai Abstract In this project, a tele-operated anthropomorphic robotic arm and hand is designed and built
Implementation of a Self-Driven Robot for Remote Surveillance
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
Team Description Paper
 Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
A Model Based Approach for Human Recognition and Reception by Robot
 16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Final Report. Chazer Gator. by Siddharth Garg
 Final Report Chazer Gator by Siddharth Garg EEL 5666: Intelligent Machines Design Laboratory A. Antonio Arroyo, PhD Eric M. Schwartz, PhD Thomas Vermeer, Mike Pridgen No table of contents entries found.
Final Report Chazer Gator by Siddharth Garg EEL 5666: Intelligent Machines Design Laboratory A. Antonio Arroyo, PhD Eric M. Schwartz, PhD Thomas Vermeer, Mike Pridgen No table of contents entries found.
Associated Emotion and its Expression in an Entertainment Robot QRIO
 Associated Emotion and its Expression in an Entertainment Robot QRIO Fumihide Tanaka 1. Kuniaki Noda 1. Tsutomu Sawada 2. Masahiro Fujita 1.2. 1. Life Dynamics Laboratory Preparatory Office, Sony Corporation,
Associated Emotion and its Expression in an Entertainment Robot QRIO Fumihide Tanaka 1. Kuniaki Noda 1. Tsutomu Sawada 2. Masahiro Fujita 1.2. 1. Life Dynamics Laboratory Preparatory Office, Sony Corporation,
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Development of excavator training simulator using leap motion controller
 Journal of Physics: Conference Series PAPER OPEN ACCESS Development of excavator training simulator using leap motion controller To cite this article: F Fahmi et al 2018 J. Phys.: Conf. Ser. 978 012034
Journal of Physics: Conference Series PAPER OPEN ACCESS Development of excavator training simulator using leap motion controller To cite this article: F Fahmi et al 2018 J. Phys.: Conf. Ser. 978 012034
Welcome to EGN-1935: Electrical & Computer Engineering (Ad)Ventures
Ventures") : ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
: ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Arduino Based Robot for Pick and Place Application
 Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT
 EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Logistics. Kinetic Art. Embedded Systems. Embedded Systems and Kinetic Art. Jim Campbell s Algorithm
 Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing Art4455: Paul Stout Department of Art and Art History Logistics Class meets M-W from 11:50-2:50 We ll start meeting in Sculpt
Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing Art4455: Paul Stout Department of Art and Art History Logistics Class meets M-W from 11:50-2:50 We ll start meeting in Sculpt
Embedded Systems and Kinetic Art. CS5968: Erik Brunvand School of Computing. Art4455: Paul Stout Department of Art and Art History.
 Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing Art4455: Paul Stout Department of Art and Art History Logistics Class meets M-W from 11:50-2:50 We ll start meeting in Sculpt
Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing Art4455: Paul Stout Department of Art and Art History Logistics Class meets M-W from 11:50-2:50 We ll start meeting in Sculpt
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robots, Androids, and Animatrons
 tool Robots, Androids, and Animatrons 12 Incredible Projects You Can Build John lovine %v. o y> 'o. ^.3. f^ A.-I \ %''1 4i ^y.yj
tool Robots, Androids, and Animatrons 12 Incredible Projects You Can Build John lovine %v. o y> 'o. ^.3. f^ A.-I \ %''1 4i ^y.yj
BIOMEDICAL ELECTRONICS. Date & Day II - SEMESTER ADVANCED MEDICAL IMAGING DIAGNOSTIC AND THERAPEUTIC EQUIPMENT MEDICAL PRODUCT DESIGN
 OSMANIA UNIVERSITY, HYDERABAD - 7 M. E. (BME) (Main) Examination, September 2013 EXAMINATION TIME TABLE Time : 2.00 PM to 5.00 PM Department of BME Date & Day BIOMEDICAL ELECTRONICS II - SEMESTER ADVANCED
OSMANIA UNIVERSITY, HYDERABAD - 7 M. E. (BME) (Main) Examination, September 2013 EXAMINATION TIME TABLE Time : 2.00 PM to 5.00 PM Department of BME Date & Day BIOMEDICAL ELECTRONICS II - SEMESTER ADVANCED
Cedarville University Little Blue
 Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
The Production and Research for Humanoid Robot
 The Production and Research for Humanoid Robot Can-Yu Liu, Bo Hu, Hai Tian, and Yang Li Communication and Engineering, Harbin Engineering University 309936424@qq.com 274625394@qq.com 1144022237@qq.com
The Production and Research for Humanoid Robot Can-Yu Liu, Bo Hu, Hai Tian, and Yang Li Communication and Engineering, Harbin Engineering University 309936424@qq.com 274625394@qq.com 1144022237@qq.com
For Experimenters and Educators
 For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
RoboPatriots: George Mason University 2009 RoboCup Team
 RoboPatriots: George Mason University 2009 RoboCup Team Keith Sullivan, Christopher Vo, Brian Hrolenok, and Sean Luke Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2009 RoboCup Team Keith Sullivan, Christopher Vo, Brian Hrolenok, and Sean Luke Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2010 RoboCup Team
 RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.