ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
|
|
|
- Gyles Sparks
- 5 years ago
- Views:
Transcription



1 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012
2 Overview French National Project labeled by Cluster Cap Digital Budget of 10M Funding of 4.9M Funded by: French Government, The Ile-de-France Region, the City of Paris January 2009 September partners Aim: to design a human-size humanoid robot, a real personal assistant for independent living of elderly and disabled people
3 Partners (4 SME, 8 Laboratories, 1 Institute)
4 Scenario Mr. Smith lives alone He is elder and visually impaired The robot helps him in the daily life The robot understands his voice and his gestures The robot plays with Mr. Smith s grand-children When Mr. Smith faints, the robot reacts Incident detection Alert

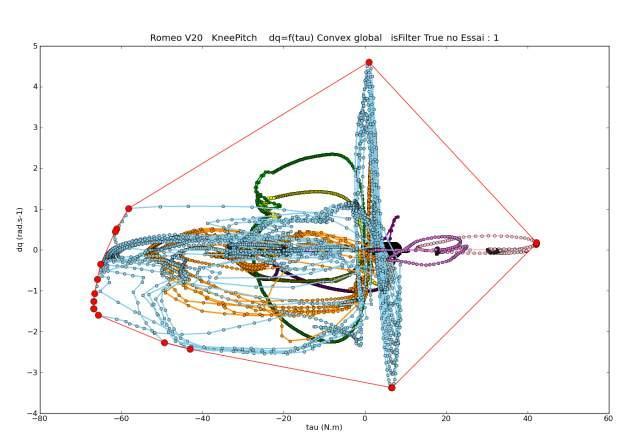
5 Dynamic modelling for dimensionning


6 Selected Design Human like aspect 1,4m 40kg Vertebral column Exoskeleton on legs Partially soft torso Mobile eyes Fix mouth


7 Kinematics : 37 DOF for the limbs + 4 for the eyes

8 Electronic Architecture 4 x CPU ATOM (Intel) 1.6 GHz 1 Gbyte on board memory Gigabit Ethernet Sensors 4 cameras 4 microphones Position sensors Motor Joint Inertial sensors Pressure sensors (feet) Tactile sensor (head) 3D sensor (option)




9 Leg Actuation based of cable and screw Differential joints in hip and ankle Centrod gear in the knee Composite Exoskeleton structure Flexible foot



10 Elbow and Shoulder Modules Cylinder-spherical module One version for elbow and neck One version for shoulder Integration of the control boards
 Cylinder joint")

11 Fore Arm Wrist 3 dof Spherical joint (pitch) Cylinder joint (roll) Actuation by wire (yaw) Hand 3 fingers 1 opposable thumb 1 actuator


12 Head Equipment 16 micros 2 loud speakers 4 cameras 2 mobile eyes Mouth with LEDS 3 ATOM boards Tactile sensor Ethernet switch New external design New internal design Easier assembly Better robustness


13 The Torso Structural framework The neck in mounted in it The arms are fixed on it The column is fixed on it The batteries are fixed on it Problem Difficult assembly Huge rigid piece The implementation of the arms are not relevant Solution New lattice structure More room for the integration




14 The vertebral column General principle 3 vertebras with 2 DOF à deux DDL (pitch and roll) The yaw joint is localized on the upper vertebra Actuated by electrical jacks
15 Joint control Cons Courant (100ms) Cons Vitesse (20 ms) Cons Pos (20 ms) Moteur MRE d/dt (10 ms) (1 ms) Current Measurement Position (10 ms)



16 First motions of Romeo In Choregraphe In Webots In the real life

17 Man Robot Interaction
18 Next steps Romeo walks for real in December Romeo is delivered to Vienna University in February Romeo are delivered to 4 French research labs in June Research on Romeo is going on Funding French project Romeo 2 (18 partners, 27 M, 4 years) European project RoboHow New hand, new arms Mobile manipulation, vision based control, Safety Evaluation

19 Thank you
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Stabilize humanoid robot teleoperated by a RGB-D sensor
 Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) *
 *") Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) * Ill-Woo Park, Jung-Yup Kim, Jungho Lee
Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) * Ill-Woo Park, Jung-Yup Kim, Jungho Lee
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
sin( x m cos( The position of the mass point D is specified by a set of state variables, (θ roll, θ pitch, r) related to the Cartesian coordinates by:
 related to the Cartesian coordinates by:") Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Mechanical Design of the Humanoid Robot Platform, HUBO
 Mechanical Design of the Humanoid Robot Platform, HUBO ILL-WOO PARK, JUNG-YUP KIM, JUNGHO LEE and JUN-HO OH HUBO Laboratory, Humanoid Robot Research Center, Department of Mechanical Engineering, Korea
Mechanical Design of the Humanoid Robot Platform, HUBO ILL-WOO PARK, JUNG-YUP KIM, JUNGHO LEE and JUN-HO OH HUBO Laboratory, Humanoid Robot Research Center, Department of Mechanical Engineering, Korea
PSU Centaur Hexapod Project
 PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining
PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Robotics Laboratory. Report Nao. 7 th of July Authors: Arnaud van Pottelsberghe Brieuc della Faille Laurent Parez Pierre-Yves Morelle
 Robotics Laboratory Report Nao 7 th of July 2014 Authors: Arnaud van Pottelsberghe Brieuc della Faille Laurent Parez Pierre-Yves Morelle Professor: Prof. Dr. Jens Lüssem Faculty: Informatics and Electrotechnics
Robotics Laboratory Report Nao 7 th of July 2014 Authors: Arnaud van Pottelsberghe Brieuc della Faille Laurent Parez Pierre-Yves Morelle Professor: Prof. Dr. Jens Lüssem Faculty: Informatics and Electrotechnics
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech
 in Tokyo Tech") Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Project Number: P13203
 Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: P13203 TIGERBOT EXTENSION Mohammad Arefin Electrical
Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: P13203 TIGERBOT EXTENSION Mohammad Arefin Electrical
BehRobot Humanoid Adult Size Team
 BehRobot Humanoid Adult Size Team Team Description Paper 2014 Mohammadreza Mohades Kasaei, Mohsen Taheri, Mohammad Rahimi, Ali Ahmadi, Ehsan Shahri, Saman Saraf, Yousof Geramiannejad, Majid Delshad, Farsad
BehRobot Humanoid Adult Size Team Team Description Paper 2014 Mohammadreza Mohades Kasaei, Mohsen Taheri, Mohammad Rahimi, Ali Ahmadi, Ehsan Shahri, Saman Saraf, Yousof Geramiannejad, Majid Delshad, Farsad
GESTURE BASED HUMAN MULTI-ROBOT INTERACTION. Gerard Canal, Cecilio Angulo, and Sergio Escalera
 GESTURE BASED HUMAN MULTI-ROBOT INTERACTION Gerard Canal, Cecilio Angulo, and Sergio Escalera Gesture based Human Multi-Robot Interaction Gerard Canal Camprodon 2/27 Introduction Nowadays robots are able
GESTURE BASED HUMAN MULTI-ROBOT INTERACTION Gerard Canal, Cecilio Angulo, and Sergio Escalera Gesture based Human Multi-Robot Interaction Gerard Canal Camprodon 2/27 Introduction Nowadays robots are able
DETC EARLY DEVELOPMENTS OF A PARALLELLY ACTUATED HUMANOID, SAFFIR
 Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12590
Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12590
Design and Implementation of a Simplified Humanoid Robot with 8 DOF
 Design and Implementation of a Simplified Humanoid Robot with 8 DOF Hari Krishnan R & Vallikannu A. L Department of Electronics and Communication Engineering, Hindustan Institute of Technology and Science,
Design and Implementation of a Simplified Humanoid Robot with 8 DOF Hari Krishnan R & Vallikannu A. L Department of Electronics and Communication Engineering, Hindustan Institute of Technology and Science,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM
 VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING
 THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid
 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid Takahiro
2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid Takahiro
CIT Brains (Kid Size League)
") CIT Brains (Kid Size League) Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Taiki Fukuda 1, Victor Tee Sin Loong 1, Daiki Maekawa 1, Yusuke Ito 1, Takamasa Akiyama 1, Taiitiro Mashiko 1, Kohei
CIT Brains (Kid Size League) Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Taiki Fukuda 1, Victor Tee Sin Loong 1, Daiki Maekawa 1, Yusuke Ito 1, Takamasa Akiyama 1, Taiitiro Mashiko 1, Kohei
3 rd Grade: April Lesson 6: Comic Strip, Recess Drawing
 3 rd Grade: April Lesson 6: Comic Strip, Recess Drawing Objective: To learn basic figure construction and to create a comic strip using pencil and markers. Technique: Drawing Set-up: (before lesson starts,
3 rd Grade: April Lesson 6: Comic Strip, Recess Drawing Objective: To learn basic figure construction and to create a comic strip using pencil and markers. Technique: Drawing Set-up: (before lesson starts,
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1
 DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1 Jungho Lee, KAIST, Republic of Korea, jungho77@kaist.ac.kr Jung-Yup Kim, KAIST, Republic of Korea, kirk1@mclab3.kaist.ac.kr Ill-Woo Park, KAIST, Republic of
DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1 Jungho Lee, KAIST, Republic of Korea, jungho77@kaist.ac.kr Jung-Yup Kim, KAIST, Republic of Korea, kirk1@mclab3.kaist.ac.kr Ill-Woo Park, KAIST, Republic of
RoboCup 2012 Best Humanoid Award Winner NimbRo TeenSize
 RoboCup 2012, Robot Soccer World Cup XVI, Springer, LNCS. RoboCup 2012 Best Humanoid Award Winner NimbRo TeenSize Marcell Missura, Cedrick Mu nstermann, Malte Mauelshagen, Michael Schreiber and Sven Behnke
RoboCup 2012, Robot Soccer World Cup XVI, Springer, LNCS. RoboCup 2012 Best Humanoid Award Winner NimbRo TeenSize Marcell Missura, Cedrick Mu nstermann, Malte Mauelshagen, Michael Schreiber and Sven Behnke
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
 2016 International Conference on Information, Communication Technology and System (ICTS) Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
2016 International Conference on Information, Communication Technology and System (ICTS) Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
Major Project SSAD. Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga ( ) Aman Saxena ( )
 Aman Saxena ( )") Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2)
") Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2) Ill-Woo Park, Jung-Yup Kim, Seo-Wook Park, and Jun-Ho Oh Department of Mechanical Engineering, Korea Advanced Institute of Science
Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2) Ill-Woo Park, Jung-Yup Kim, Seo-Wook Park, and Jun-Ho Oh Department of Mechanical Engineering, Korea Advanced Institute of Science
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize)
 and Darmstadt Dribblers (TeenSize)") Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
The Production and Research for Humanoid Robot
 The Production and Research for Humanoid Robot Can-Yu Liu, Bo Hu, Hai Tian, and Yang Li Communication and Engineering, Harbin Engineering University 309936424@qq.com 274625394@qq.com 1144022237@qq.com
The Production and Research for Humanoid Robot Can-Yu Liu, Bo Hu, Hai Tian, and Yang Li Communication and Engineering, Harbin Engineering University 309936424@qq.com 274625394@qq.com 1144022237@qq.com
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS
 KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
EROS TEAM. Team Description for Humanoid Kidsize League of Robocup2013
 EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
Mechatronic Design, Fabrication and Analysis of a Small-Size Humanoid Robot Parinat
 Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
Meet Pepper. Because of this, Pepper will truly change the way we live our lives.
 PRESS KIT Meet Pepper Pepper is a humanoid robot, engaging, surprising and above all kind. Pepper is the first emotional robot. He was not designed for an industrial function, rather to be a true companion
PRESS KIT Meet Pepper Pepper is a humanoid robot, engaging, surprising and above all kind. Pepper is the first emotional robot. He was not designed for an industrial function, rather to be a true companion
The Robot Program Episode 002: Building JD
 www.ez-robot.com The Robot Program Episode 002: Building JD This lesson will demonstrate how to build the [b]revolution JD[/b] robot. Follow along with [b]the Robot Program Episode 002: Building JD[/b].
www.ez-robot.com The Robot Program Episode 002: Building JD This lesson will demonstrate how to build the [b]revolution JD[/b] robot. Follow along with [b]the Robot Program Episode 002: Building JD[/b].
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
VATIO UP Team Description Paper for Humanoid KidSize League of RoboCup 2013
 VATIO UP Team Description Paper for Humanoid KidSize League of RoboCup 2013 Efraín Hernández, Roberto Carlos Ramírez, Jonathan Alcántar, Alberto Petrilli, Andrea Santillana, Antonio Salvador Gómez Robotics
VATIO UP Team Description Paper for Humanoid KidSize League of RoboCup 2013 Efraín Hernández, Roberto Carlos Ramírez, Jonathan Alcántar, Alberto Petrilli, Andrea Santillana, Antonio Salvador Gómez Robotics
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Human Robot Interaction
 Human Robot Interaction Taxonomy 1 Source Material About This Class Classifying Human-Robot Interaction an Updated Taxonomy Topics What is this taxonomy thing? Some ways of looking at Human-Robot relationships.
Human Robot Interaction Taxonomy 1 Source Material About This Class Classifying Human-Robot Interaction an Updated Taxonomy Topics What is this taxonomy thing? Some ways of looking at Human-Robot relationships.
Realization of Humanoid Robot Playing Golf
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 6 Special issue with selection of extended papers from 6th International Conference on Logistic, Informatics and Service
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 6 Special issue with selection of extended papers from 6th International Conference on Logistic, Informatics and Service
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Chapter 3. Components of the Robot
 Chapter 3 Components of the Robot Overview WHAT YOU WILL LEARN The differences between hydraulic, pneumatic, and electric power Some of the history behind hydraulic and pneumatic power What the controller
Chapter 3 Components of the Robot Overview WHAT YOU WILL LEARN The differences between hydraulic, pneumatic, and electric power Some of the history behind hydraulic and pneumatic power What the controller
NimbRo AdultSize Team Description 2017
 NimbRo AdultSize Team Description 2017 Grzegorz Ficht, Hafez Farazi, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science Institute VI: Autonomous Intelligent Systems Friedrich-Ebert-Allee
NimbRo AdultSize Team Description 2017 Grzegorz Ficht, Hafez Farazi, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science Institute VI: Autonomous Intelligent Systems Friedrich-Ebert-Allee
Team MU-L8 Humanoid League TeenSize Team Description Paper 2014
 Team MU-L8 Humanoid League TeenSize Team Description Paper 2014 Adam Stroud, Kellen Carey, Raoul Chinang, Nicole Gibson, Joshua Panka, Wajahat Ali, Matteo Brucato, Christopher Procak, Matthew Morris, John
Team MU-L8 Humanoid League TeenSize Team Description Paper 2014 Adam Stroud, Kellen Carey, Raoul Chinang, Nicole Gibson, Joshua Panka, Wajahat Ali, Matteo Brucato, Christopher Procak, Matthew Morris, John
ALOIS TOMÁNEK FORMS OF PUPPETS
 ALOIS TOMÁNEK FORMS OF PUPPETS CONTENTS INTRODUCTION...7 HOW TO USE THIS BOOK...9 I. THE TRANSFORMATION OF THE PUPPET... 11 II. PUPPETS IN THE CLASSICAL PUPPET THEATRE... 15 (A) Puppets Operated from Below...
ALOIS TOMÁNEK FORMS OF PUPPETS CONTENTS INTRODUCTION...7 HOW TO USE THIS BOOK...9 I. THE TRANSFORMATION OF THE PUPPET... 11 II. PUPPETS IN THE CLASSICAL PUPPET THEATRE... 15 (A) Puppets Operated from Below...
Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2) Development
 for Humanoid Robot (HRP-2) Development") Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
Introduction to Talking Robots
 Introduction to Talking Robots Graham Wilcock Adjunct Professor, Docent Emeritus University of Helsinki 20.9.2016 1 Walking and Talking Graham Wilcock 20.9.2016 2 Choregraphe Box Libraries Animations Breath,
Introduction to Talking Robots Graham Wilcock Adjunct Professor, Docent Emeritus University of Helsinki 20.9.2016 1 Walking and Talking Graham Wilcock 20.9.2016 2 Choregraphe Box Libraries Animations Breath,
HUMANOID ROBOT SIMULATOR: A REALISTIC DYNAMICS APPROACH. José L. Lima, José C. Gonçalves, Paulo G. Costa, A. Paulo Moreira
 HUMANOID ROBOT SIMULATOR: A REALISTIC DYNAMICS APPROACH José L. Lima, José C. Gonçalves, Paulo G. Costa, A. Paulo Moreira Department of Electrical Engineering Faculty of Engineering of University of Porto
HUMANOID ROBOT SIMULATOR: A REALISTIC DYNAMICS APPROACH José L. Lima, José C. Gonçalves, Paulo G. Costa, A. Paulo Moreira Department of Electrical Engineering Faculty of Engineering of University of Porto
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
The UT Austin Villa 3D Simulation Soccer Team 2008
 UT Austin Computer Sciences Technical Report AI09-01, February 2009. The UT Austin Villa 3D Simulation Soccer Team 2008 Shivaram Kalyanakrishnan, Yinon Bentor and Peter Stone Department of Computer Sciences
UT Austin Computer Sciences Technical Report AI09-01, February 2009. The UT Austin Villa 3D Simulation Soccer Team 2008 Shivaram Kalyanakrishnan, Yinon Bentor and Peter Stone Department of Computer Sciences
Cost Oriented Humanoid Robots
 Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot
 Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot Kiyoshi
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot Kiyoshi
The Humanoid Robot ARMAR: Design and Control
 The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016
 WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Adaptive Dynamic Simulation Framework for Humanoid Robots
 Adaptive Dynamic Simulation Framework for Humanoid Robots Manokhatiphaisan S. and Maneewarn T. Abstract This research proposes the dynamic simulation system framework with a robot-in-the-loop concept.
Adaptive Dynamic Simulation Framework for Humanoid Robots Manokhatiphaisan S. and Maneewarn T. Abstract This research proposes the dynamic simulation system framework with a robot-in-the-loop concept.
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks
 Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks Muh Anshar Faculty of Engineering and Information Technology
Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks Muh Anshar Faculty of Engineering and Information Technology
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Classification for Motion Game Based on EEG Sensing
 Classification for Motion Game Based on EEG Sensing Ran WEI 1,3,4, Xing-Hua ZHANG 1,4, Xin DANG 2,3,4,a and Guo-Hui LI 3 1 School of Electronics and Information Engineering, Tianjin Polytechnic University,
Classification for Motion Game Based on EEG Sensing Ran WEI 1,3,4, Xing-Hua ZHANG 1,4, Xin DANG 2,3,4,a and Guo-Hui LI 3 1 School of Electronics and Information Engineering, Tianjin Polytechnic University,
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
arxiv: v1 [cs.ro] 22 Apr 2016
![arxiv: v1 [cs.ro] 22 Apr 2016](/thumbs/86/93666401.jpg "arxiv: v1 [cs.ro] 22 Apr 2016") Validation of computer simulations of the HyQ robot arxiv:164.6818v1 [cs.ro] 22 Apr 216 Dynamic Legged Systems lab Technical Report 1 DLS-TR-1 Version 1. Marco Frigerio, Victor Barasuol, Michele Focchi
Validation of computer simulations of the HyQ robot arxiv:164.6818v1 [cs.ro] 22 Apr 216 Dynamic Legged Systems lab Technical Report 1 DLS-TR-1 Version 1. Marco Frigerio, Victor Barasuol, Michele Focchi
TigerBot IV Rochester Institute of Technology
 TigerBot IV Rochester Institute of Technology Group Members Mike Lew (ISE) Dan Wiatroski (ME) Tom Whitmore (ME) Geoff Herman (ME) Sean Lillis (CE) Brian Stevenson (EE) James O Donoghue (CE) Mohammad Arefin
TigerBot IV Rochester Institute of Technology Group Members Mike Lew (ISE) Dan Wiatroski (ME) Tom Whitmore (ME) Geoff Herman (ME) Sean Lillis (CE) Brian Stevenson (EE) James O Donoghue (CE) Mohammad Arefin
The design and making of a humanoid robotic hand
 The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS
 EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS Presented By : B.GOPYA College: Usha Rama College of Engineering and technology. Branch & Year: ECE-III YEAR E-Mail: battegopya@gmail.com
EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS Presented By : B.GOPYA College: Usha Rama College of Engineering and technology. Branch & Year: ECE-III YEAR E-Mail: battegopya@gmail.com
Technique of Standing Up From Prone Position of a Soccer Robot
 EMITTER International Journal of Engineering Technology Vol. 6, No. 1, June 2018 ISSN: 2443-1168 Technique of Standing Up From Prone Position of a Soccer Robot Nur Khamdi 1, Mochamad Susantok 2, Antony
EMITTER International Journal of Engineering Technology Vol. 6, No. 1, June 2018 ISSN: 2443-1168 Technique of Standing Up From Prone Position of a Soccer Robot Nur Khamdi 1, Mochamad Susantok 2, Antony
Team TH-MOS Abstract. Keywords. 1 Introduction 2 Hardware and Electronics
 Team TH-MOS Pei Ben, Cheng Jiakai, Shi Xunlei, Zhang wenzhe, Liu xiaoming, Wu mian Department of Mechanical Engineering, Tsinghua University, Beijing, China Abstract. This paper describes the design of
Team TH-MOS Pei Ben, Cheng Jiakai, Shi Xunlei, Zhang wenzhe, Liu xiaoming, Wu mian Department of Mechanical Engineering, Tsinghua University, Beijing, China Abstract. This paper describes the design of