Chapter 3. Components of the Robot
|
|
|
- Jack Bell
- 5 years ago
- Views:
Transcription

1 Chapter 3 Components of the Robot
2 Overview WHAT YOU WILL LEARN The differences between hydraulic, pneumatic, and electric power Some of the history behind hydraulic and pneumatic power What the controller does for the robot How we use the teach pendant and what you will find on one How the manipulator of the robot relates to the human body
3 Overview cont. What you will learn The difference between major and minor axes How to number the axes of the robot They ways we mount a robot and some of the options therein
4 Power Supply The power supply is what provides the force to move the robot around and without it, most robots are useless There are three main types of power used in robots: Electrical Hydraulic Pneumatic
5 Electric Power Electricity-is the flow of electrons from a place of excess electrons to a place of electron deficit; we route these electrons through components to do work Voltage-a measurement of the potential difference or imbalance of electrons between two points and the force that will cause electrons to flow
6 Electric Power cont. Amperes or amps-one amp is equal to 6.25 x electrons passing a point in one second, and this flow does the work in the circuit Resistance-the opposition to the flow of electrons in the circuit and the reason why electrical systems generate heat during normal operation
7 AC/DC Direct Current (DC) - Electrons flow in one direction This is the voltage we get from batteries, solar panels, thermocouples, and similar sources Alternating Current (AC) Electrons flow back and forth in the circuit This is the electricity in your home, business, industry, and other generated sources
8 DC DC systems have a set polarity or positive and negative orientation because electrons flow in one direction only Reversing the polarity of many DC components will result in improper operation or damage to the component
9 Notice how the side that traces back to the positive terminal of the battery is labeled with a +. This is to indicate the polarity of the circuit components
10 DC cont. conventional current flow theory - Originally, scientists believed that electrons flowed from the positive terminal of a battery, through the circuit, and back to the negative terminal electron flow theory - Experiments later proved that the electrons actually flow from the negative terminal, through the circuit, and back to the positive terminal
11 DC cont. Amp-hours (Ah) a measure of how many amps a power source can deliver over time For example, a 10 amp-hour battery could deliver 1 amp for 10 hours, or 2 amps for 5 hours To increase the Ah of a system, we hook the power sources in parallel When connected this way, we add the Ah of the sources together to find the new total Ah

12 Notice how the positives are hooked together, as are the negatives To the left is a parallel set of batteries to increase the Ah of a system. Below is a couple of examples of battery powered robots.
13 DC cont. Sometimes we need more electromotive force, or voltage, to drive electrons through the system To increase the voltage of a system, we hook the sources in series To determine the new voltage, add the voltage values of all the sources hooked together in series
14 Here is an example of how to hook up batteries to increase the voltage. Notice how the positive of one battery touches the negative of the other.
15 Here is an example of a battery bank where each cell is made of multiple batteries in series to raise the voltage. The cells are then connected in parallel to increase the overall Ah of the system.
16 AC AC power does not have a set polarity because it is constantly changing the direction it flows through the circuit With AC, there is no component polarity to worry about AC power starts at zero, rises to a positive value, drops back to zero, falls to a negative value, and then rises to zero once more.
17 DC voltage is consistent, thus the flat line. AC power is always changing, thus the sine wave form
18 AC cont. One complete wave from zero to positive to zero to negative and back to zero is called a cycle In America, we have 60-hertz (Hz) power, or 60 of the sine wave cycles per second we measure it in Root Mean Square (RMS), which is a mathematical average of the sine wave
19 Single-phase vs Three-phase Single-phase AC is AC power that has one sine wave provided to the system via a single hot wire and returned on a neutral wire Three-phase AC is AC power that has three sine waves that are 120 degrees apart electrically
20 Notice how there is only one sine wave on the left, leading to times of no electron flow. The three waves on the right creates a constant flow of electrons with no dead spots
21 Single-phase 120V electricity is an example of singlephase The power comes in on hot wire, which is usually black or red It leaves on the neutral wire, which is often white or grey It also has a ground wire that is there for protection in case of shorts
22 Three-phase This is the primary power source for most industrial facilities due to the great amount of work it can perform and the fact that it is very efficient The nature of the sine wave arrangement makes it so there is never a dead spot
23 Three-phase cont. Because of the nature of three-phase, these systems typically do not require neutral wires There will be three hot wires and a ground for safety The hot wires split there time between being supply and return routes for the electrons
24 Hydraulic Power Hydraulic power involves the use of a non-compressible liquid given velocity and then piped somewhere to do work Originally we used water in hydraulic systems, but this was bad for metal parts, grew bacteria, and would freeze in cold conditions Today we use natural and synthetic oils in hydraulic systems to avoid these pitfalls

25 Here is an example of a hydraulic system complete with pump, chiller, filter, supply manifold, and return manifold.
26 Hydraulics cont. When dealing with hydraulic leaks, there are a few key points to remember: Hydraulic oil from a running system may be hot enough to burn skin, so try to avoid direct contact until you are sure it is safe. If a hydraulic oil puddle is uncontrolled, it can cover a much larger area than you might think. There are special barrier and damming devices that can help to control large spills.
27 Hydraulics cont. More on leaks Leaks that generate an oil mist can be a fire hazard. Most hydraulic oils are stable and take a lot of heat to ignite, except when dispersed as a mist in the air. Pinhole leaks can generate enough force to cut through metal or skin and bone Cleaning up hydraulic oil usually requires the use of some type of absorbing medium.
28 Hydraulics cont. More leak tips: You do not want to let hydraulic oil go down any drains connected to the sewer system; it is a contaminant and will wreak havoc at water treatment facilities or on any natural waterways it might reach. When finished with the cleanup, make sure you dispose of any oil and oil-soaked materials properly. (See the Safety Data Sheet [SDS] or a supervisor for more information on proper disposal. SDS sheets tell you about chemicals, their dangers, how to handle them properly, and how to dispose of them.)
29 Pneumatic Power Pneumatic power is very similar to hydraulic power with the primary difference being the use of compressible gas instead of noncompressible liquid to transmit power Because gas is compressible, it is nearly impossible to maintain position mid stroke or any position that is not under constant pressure
30 Pneumatic Power cont. Because the gas used in pneumatic power is usually the same air we breath, we can release it back into the area when we are done with it. This is often a loud process and can stir up dust We use mufflers to slow the air and reduce the noise generated to combat these problems
")
31 You can see a couple of examples of mufflers on the left side of this picture. (the brass colored cone and silver cylinder)
32 Pneumatic Power cont. Many early robots were air powered and held position by running into hard stops, which earned them the nick name Bang Bang robots Today pneumatics is commonly used to power the tooling of the robot
33 Which One to Use? The choice of power source for a robot typically comes down to three questions: 1. What do we want or need the robot to do? 2. What do we have available? 3. Where will the robot work or operate? Currently, electricity is the power source of choice for a majority of the robots

34 In the early years of robotics, a system to move something of this size and weight would have been hydraulically powered. Today we have electric motors that can handle the load just fine
35 Controller/Logic Function Controller-the brains of the operation and the part of the robot responsible for executing actions in a specific order under specified conditions It takes whatever sensor input is available for the robot makes decisions based on a system of logic filters and commands called a program then activates various outputs as instructed by the program


36 Here are a couple of examples of robot controllers


37 Here are a couple of controllers for the hobby robotics world
38 Controller/Logic Function cont. Older robots used something called relay logic to control the operation of the system Relay logic uses devices know as relays to create various logic-sorting situations, which would in turn control the operation of the system Relays use a small control voltage to make or break connections between field devices Relays have contacts that are normally open (NO) which do not allow power through when the relay is deenergized, and normally closed (NC) contacts that do pass power when the relay is de-energized
39 Teach Pendant/Interface The interface device allows us to communicate with the controller, monitor what is going on, and make changes as needed In industrial robots, this is typically the teach pendant In the hobby robotics world this is often a computer of smart phone app

40 Here is an ABB teach pendant used to communicate with the robot and monitor what is going on
41 Teach Pendant/Interface cont. For the industrial robot, the teach pendant will be the part of the robot you interact with the most Remember, anytime you are in the danger zone you MUST have the teach pendant with you! Industrial teach pendants will have an E- stop and dead man s switch The dead man s switch, usually a trigger- or bumpertype switch on the back of the pendant, is required to move the robot manually if you release the switch or press down too hard, the robot stops moving

42 The yellow triggers shown here are dead man s switches. When in manual, at lease one of these must be depressed to move the robot.


43 Here are a couple more industrial teach pendants. The Baxter robot, which is an industrial robot, uses a tablet as its controller, proving that they come in all varieties
44 Manipulator, DOF, and Axis Numbering Manipulators come in all shapes and sizes and are what the robot uses to interact with and affect the world around it They come in all shapes and sizes, though the arm style is a favorite of industry


45 To the right is an example of an arm style robot and on the left is the Delta overhead style that is gaining popularity due to its speed and accuracy
46 Degree of Freedom (DOF) Each axis of the manipulator adds one more way the robot can move or a Degree of Freedom (DOF) The more DOF of a manipulator, the greater the flexibility of the system When it comes to labeling the axes of a robot, we start counting at the base, where it mounts, and then continue to the end where the tooling attaches
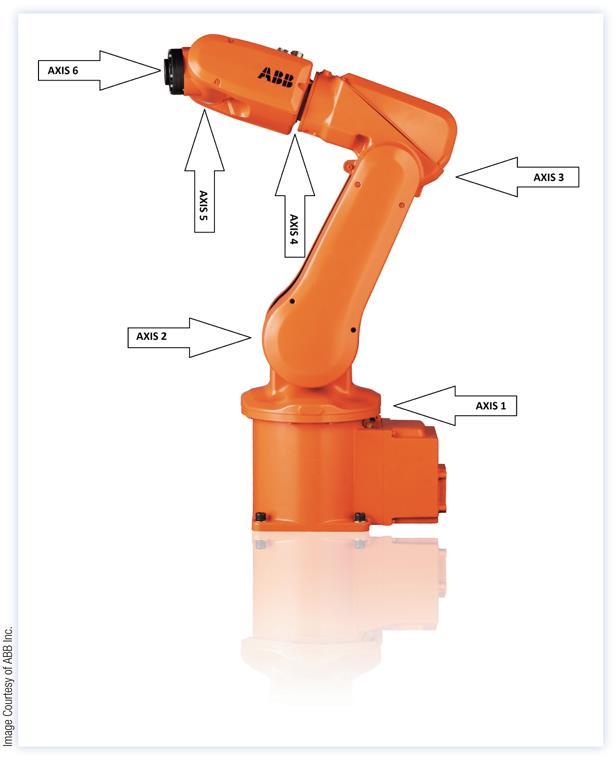
47
48 Axes There are two main groupings of the axes we often refer to: major axes - responsible for getting whatever tooling we are using into the general area it needs to be Typically axes 1-3 on most robots Equated to the motion of the human torso and shoulder minor axes - responsible for the orientation and positioning of robot tooling Typically axes 4-6 on most robots

49 Here you can see the major axes at work, getting the tooling near where the work will be done
50 Minor Axes We further break down the minor axes into: Pitch, (axis 4), which is the up and down orientation of the wrist Yaw, (axis 5), which is the side to side orientation of the wrist Roll, (axis 6), which is the rotation of the wrist These three are often equated to the motion of the human wrist
51 External Axes External axes - axes of motion that often move parts, position tooling for quick changes, or in some other way help with the tasks of the robot These are under the control of the robot, but are not part of the manipulator nor counted in the major or minor axes


52 Not all robots have just 6 axes. The MOTOMAN system on the left has at least 12 and the NAO on the right has 25
53 Base Types The base is where the robot is mounted and there are several options here as well For many of the systems used in industry, solid-mount bases are the preferred way to go These involve mounting the robot firmly to the floor or other structures using bolts and fastening systems

54 Here are a couple examples of solid-mounted robots
55 Solid-Mount Base cont. Here are a few key points to remember with the solid mount base: Make sure that whatever holds the robot in place is robust enough to bear the forces and weight of the system. Make sure that what you mount the robot on can handle the weight of the system as well as whatever load it will be maneuvering.
56 Solid-Mount Base cont. Key points continued: Make sure to check the security/tightness of any mounting hardware periodically, paying special attention to any noted wear. Crashes are conditions where the robot endures unexpected forces, so make sure to check the base when you are inspecting the system, especially for wall or overhead mounts.
57 Mobile Bases mobile bases - systems used to move the manipulator to various location so that it can perform its functions We often refer to a linear base with a finite reach as a gantry base Another common mobile base is the wheeled or tracked system These systems give the robot the ability to cover large areas and even traverse difficult terrains

58 The robot mounted to the white, overhead system is a gantry based robot

59 Here is the Robonaut on his mobile wheeled base, known as the centaur configuration.
60 Mobile Bases cont. Another popular mobile base is to add legs to the robot for mobility Two legs is still hard to balance a robot on Four or more legs tend to make mobility easier for the robot Hexapods have six legs and are a popular configuration in the hobby world Any type of movement we can use for other systems can be adapted for the robot to use as well


61 On the right is the legged NAO robot. On the left is a solid mounted robot that is designed for the whole base to be picked up and moved when there is a need, making it a hybrid of solid-mount and mobile in a sense.
62 Review Power supply. This section was about the common forces used to run robots and covered information about how each of these power sources worked. Controller/logic function. Here you learned about the brain of the robot and its importance. Teach pendant/interface. This section was about how we communicate with the robot and direct actions or make changes to operation.
63 Review cont. Manipulator, DOF, and axis numbering. Here you learned how to number axes, how we move the robot around, and what degrees of freedom are. Base types. This section was about what we mount the robot to and why as well as some other things to keep in mind.
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM
 Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
IMPORTANCE OF INSULATION RESISTANCE
 IMPORTANCE OF INSULATION RESISTANCE What is Good Insulation? Every electric wire in your plant whether it s in a motor, generator, cable, switch, transformer, etc., is carefully covered with some form
IMPORTANCE OF INSULATION RESISTANCE What is Good Insulation? Every electric wire in your plant whether it s in a motor, generator, cable, switch, transformer, etc., is carefully covered with some form
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY
 INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
Operators Manual: Diamond Rock Saw Excavator Attachment Austramac Flashcut Series
 Operators Manual: Diamond Rock Saw Excavator Attachment Austramac Flashcut Series! WARNING! Inappropriate use of rock saw may cause serious injury or death. Operators must read this manual before use and
Operators Manual: Diamond Rock Saw Excavator Attachment Austramac Flashcut Series! WARNING! Inappropriate use of rock saw may cause serious injury or death. Operators must read this manual before use and
Please use the Q & A utility to ask us any questions concerning the material being presented.
 Meet Our Team Webinar Notes Please use the Q & A utility to ask us any questions concerning the material being presented. You can find a recording of this webinar and presentation on our Video Library
Meet Our Team Webinar Notes Please use the Q & A utility to ask us any questions concerning the material being presented. You can find a recording of this webinar and presentation on our Video Library
accidents which arise due to nonobservance and the safety information herein. SPECIFICATIONS
 7 TON ELECTRIC LOG SPLITTER Model: 05620 CALIFORNIA PROPOSITION 65 WARNING: You can create dust when you cut, sand, drill or grind materials such as wood, paint, metal, concrete, cement, or other masonry.
7 TON ELECTRIC LOG SPLITTER Model: 05620 CALIFORNIA PROPOSITION 65 WARNING: You can create dust when you cut, sand, drill or grind materials such as wood, paint, metal, concrete, cement, or other masonry.
Final Review Powerpoint
 Final Review Powerpoint Simple Machines- A device that makes work easier, faster, or changes the direction of force using few or no moving parts Rube Goldberg- a complex machine that does a simple task
Final Review Powerpoint Simple Machines- A device that makes work easier, faster, or changes the direction of force using few or no moving parts Rube Goldberg- a complex machine that does a simple task
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
THESE ARE NOT TOYS!! IF YOU CAN NOT FOLLOW THE DIRECTIONS, YOU WILL NOT USE THEM!!
 ROBOTICS If you were to walk into any major manufacturing plant today, you would see robots hard at work. Businesses have used robots for many reasons. Robots do not take coffee breaks, vacations, call
ROBOTICS If you were to walk into any major manufacturing plant today, you would see robots hard at work. Businesses have used robots for many reasons. Robots do not take coffee breaks, vacations, call
MECHATRONICS SYSTEM DESIGN
 MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
JARVIS. Model25CL-4,5,6 Hock Cutter and Loin Dropper. 25CL--5 Front Legs and Horns. 25CL--4 Hind Legs and Horns. 25CL--6 Loins
 Model25CL-4,5,6 Hock Cutter and Loin Dropper 25CL--4 Hind Legs and Horns 25CL--5 Front Legs and Horns 25CL--6 Loins EQUIPMENT SELECTION... Ordering No. TABLE OF CONTENTS... Page 25CL--4... 4025007 25CL--5...
Model25CL-4,5,6 Hock Cutter and Loin Dropper 25CL--4 Hind Legs and Horns 25CL--5 Front Legs and Horns 25CL--6 Loins EQUIPMENT SELECTION... Ordering No. TABLE OF CONTENTS... Page 25CL--4... 4025007 25CL--5...
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Resonance Tube. 1 Purpose. 2 Theory. 2.1 Air As A Spring. 2.2 Traveling Sound Waves in Air
 Resonance Tube Equipment Capstone, complete resonance tube (tube, piston assembly, speaker stand, piston stand, mike with adaptors, channel), voltage sensor, 1.5 m leads (2), (room) thermometer, flat rubber
Resonance Tube Equipment Capstone, complete resonance tube (tube, piston assembly, speaker stand, piston stand, mike with adaptors, channel), voltage sensor, 1.5 m leads (2), (room) thermometer, flat rubber
Tech Tutorials > H-Bridge
 Tech Tutorials > H-Bridge [Taken from: http://www.mcmanis.com/chuck/robotics/tutorial/h-bridge/index.html] Basic Theory Let's start with the name, H-bridge. Sometimes called a "full bridge" the H-bridge
Tech Tutorials > H-Bridge [Taken from: http://www.mcmanis.com/chuck/robotics/tutorial/h-bridge/index.html] Basic Theory Let's start with the name, H-bridge. Sometimes called a "full bridge" the H-bridge
ENGLISH (Original instructions) INSTRUCTION MANUAL. Drill DS4012 DOUBLE INSULATION. IMPORTANT: Read Before Using.
 INSTRUCTION MANUAL. Drill DS4012 DOUBLE INSULATION. IMPORTANT: Read Before Using.") ENGLISH (Original instructions) INSTRUCTION MANUAL Drill DS402 05402 DOUBLE INSULATION IMPORTANT: Read Before Using. ENGLISH (Original instructions) SPECIFICATIONS Model DS402 Capacities Steel 3 mm Wood
ENGLISH (Original instructions) INSTRUCTION MANUAL Drill DS402 05402 DOUBLE INSULATION IMPORTANT: Read Before Using. ENGLISH (Original instructions) SPECIFICATIONS Model DS402 Capacities Steel 3 mm Wood
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Thermal Imaging, Power Quality and Harmonics
 Thermal Imaging, Power Quality and Harmonics Authors: Matthew A. Taylor and Paul C. Bessey of AVO Training Institute Executive Summary Infrared (IR) thermal imaging (thermography) is an effective troubleshooting
Thermal Imaging, Power Quality and Harmonics Authors: Matthew A. Taylor and Paul C. Bessey of AVO Training Institute Executive Summary Infrared (IR) thermal imaging (thermography) is an effective troubleshooting
Drill INSTRUCTION MANUAL. WARNING: For your personal safety, READ and UNDERSTAND before using. SAVE THESE INSTRUCTIONS FOR FUTURE 1 REFERENCE.
 ENGLISH (Original instructions) INSTRUCTION MANUAL Drill 6411 6412 6413 007894 DOUBLE INSULATION WARNING: For your personal safety, READ and UNDERSTAND before using. SAVE THESE INSTRUCTIONS FOR FUTURE
ENGLISH (Original instructions) INSTRUCTION MANUAL Drill 6411 6412 6413 007894 DOUBLE INSULATION WARNING: For your personal safety, READ and UNDERSTAND before using. SAVE THESE INSTRUCTIONS FOR FUTURE
Standards and Regulations MRSD PROJECT - II
 Standards and Regulations TEAM HARP (TEAM D) MRSD PROJECT - II CARNEGIE MELLON UNIVERSITY ABHISHEK, ALEX, FEROZE, LEKHA, RICK Agenda ANSI/RIA R15.06 Parts 1 (American National Standard for Industrial Robots
Standards and Regulations TEAM HARP (TEAM D) MRSD PROJECT - II CARNEGIE MELLON UNIVERSITY ABHISHEK, ALEX, FEROZE, LEKHA, RICK Agenda ANSI/RIA R15.06 Parts 1 (American National Standard for Industrial Robots
KeyTrain Applied Technology Course Objectives, Outlines and Estimated Times of Completion
 KeyTrain Applied Technology Course Objectives, Outlines and Estimated Times of Completion Applied Technology Course Description: KeyTrain's Applied Technology course teaches the ability to solve work-place
KeyTrain Applied Technology Course Objectives, Outlines and Estimated Times of Completion Applied Technology Course Description: KeyTrain's Applied Technology course teaches the ability to solve work-place
Baxter Safety and Compliance Overview
 Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Mechanical Maintenance Guide
 Mechanical Maintenance Guide 1 If your Handibot is not performing as you expect it to it may be in need of some maintenance. Rough handling during shipping, a crash during cutting, or just typical wear
Mechanical Maintenance Guide 1 If your Handibot is not performing as you expect it to it may be in need of some maintenance. Rough handling during shipping, a crash during cutting, or just typical wear
ENGLISH (Original instructions) INSTRUCTION MANUAL. Drill DOUBLE INSULATION. IMPORTANT: Read Before Using.
 INSTRUCTION MANUAL. Drill DOUBLE INSULATION. IMPORTANT: Read Before Using.") ENGLISH (Original instructions) INSTRUCTION MANUAL Drill 64 642 643 007894 DOUBLE INSULATION IMPORTANT: Read Before Using. ENGLISH (Original instructions) SPECIFICATIONS Model 64 642 643 Capacities Steel
ENGLISH (Original instructions) INSTRUCTION MANUAL Drill 64 642 643 007894 DOUBLE INSULATION IMPORTANT: Read Before Using. ENGLISH (Original instructions) SPECIFICATIONS Model 64 642 643 Capacities Steel
AUT 107 Mechanical Systems I 3 Credits College Now/CTE Student Outcomes Checklist cocc.edu/departments/college-now Student s Name
 3 Credits College Now/CTE Student Outcomes Checklist cocc.edu/departments/college-now Student s Name Student s Signature Completion Date High School Teacher s Signature Recommended Grade High School COCC
3 Credits College Now/CTE Student Outcomes Checklist cocc.edu/departments/college-now Student s Name Student s Signature Completion Date High School Teacher s Signature Recommended Grade High School COCC
EE 233 Circuit Theory Lab 4: Second-Order Filters
 EE 233 Circuit Theory Lab 4: Second-Order Filters Table of Contents 1 Introduction... 1 2 Precautions... 1 3 Prelab Exercises... 2 3.1 Generic Equalizer Filter... 2 3.2 Equalizer Filter for Audio Mixer...
EE 233 Circuit Theory Lab 4: Second-Order Filters Table of Contents 1 Introduction... 1 2 Precautions... 1 3 Prelab Exercises... 2 3.1 Generic Equalizer Filter... 2 3.2 Equalizer Filter for Audio Mixer...
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Band-Master ATS Nano Pneumatic Banding Tool Operating Instructions
 Band-Master ATS 601-118 Nano Pneumatic Banding Tool CONTENTS 601-118 Overview... 3 Safety.... 5 Initial Tool Set-up... 5 Regulator assembly mounting... 5 Attach tool head to regulator.... 6 Operating instructions...
Band-Master ATS 601-118 Nano Pneumatic Banding Tool CONTENTS 601-118 Overview... 3 Safety.... 5 Initial Tool Set-up... 5 Regulator assembly mounting... 5 Attach tool head to regulator.... 6 Operating instructions...
Blue Point Engineering
 Blue Point Engineering Instruction I www.bpesolutions.com Pointing the Way to Solutions! Animatronic Wizard - 3 Board (BPE No. WAC-0030) Version 3.0 2009 Controller Page 1 The Wizard 3 Board will record
Blue Point Engineering Instruction I www.bpesolutions.com Pointing the Way to Solutions! Animatronic Wizard - 3 Board (BPE No. WAC-0030) Version 3.0 2009 Controller Page 1 The Wizard 3 Board will record
ENGLISH (Original instructions) INSTRUCTION MANUAL. Drill MT600 MT601 DOUBLE INSULATION. IMPORTANT: Read Before Using.
 INSTRUCTION MANUAL. Drill MT600 MT601 DOUBLE INSULATION. IMPORTANT: Read Before Using.") ENGLISH (Original instructions) INSTRUCTION MANUAL Drill MT600 MT60 003635 DOUBLE INSULATION IMPORTANT: Read Before Using. ENGLISH (Original instructions) SPECIFICATIONS Model MT600 MT60 Capacities Steel
ENGLISH (Original instructions) INSTRUCTION MANUAL Drill MT600 MT60 003635 DOUBLE INSULATION IMPORTANT: Read Before Using. ENGLISH (Original instructions) SPECIFICATIONS Model MT600 MT60 Capacities Steel
Risk Management Department. Control of Hazardous Energy
 Risk Management Department Control of 1 Introduction Power tools, machinery and devices make our lives easier and our jobs more productive. However, the tools, machines and systems we use every day can
Risk Management Department Control of 1 Introduction Power tools, machinery and devices make our lives easier and our jobs more productive. However, the tools, machines and systems we use every day can
Electromechanical Technology /Electromechanical Engineering Technology CIP Task Grid
 1 Secondary Task List 100 DEMONSTRATE KNOWLEDGE OF TECHNICAL REPORTS 101 Identify components of technical reports. 102 Demonstrate knowledge of the common components of technical documents. 103 Maintain
1 Secondary Task List 100 DEMONSTRATE KNOWLEDGE OF TECHNICAL REPORTS 101 Identify components of technical reports. 102 Demonstrate knowledge of the common components of technical documents. 103 Maintain
The Mathematics of the Stewart Platform
 The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
PS2-SMC-06 Servo Motor Controller Interface
 PS2-SMC-06 Servo Motor Controller Interface PS2-SMC-06 Full Board Version PS2 (Playstation 2 Controller/ Dual Shock 2) Servo Motor Controller handles 6 servos. Connect 1 to 6 Servos to Servo Ports and
PS2-SMC-06 Servo Motor Controller Interface PS2-SMC-06 Full Board Version PS2 (Playstation 2 Controller/ Dual Shock 2) Servo Motor Controller handles 6 servos. Connect 1 to 6 Servos to Servo Ports and
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
SSPMA Sump and Sewage Pump Manufacturers Association
 SSPMA Sump and Sewage Pump Manufacturers Association Since 1956, we are a North American trade organization of sump, effluent, and sewage pump manufacturers and their suppliers. Working together to: train
SSPMA Sump and Sewage Pump Manufacturers Association Since 1956, we are a North American trade organization of sump, effluent, and sewage pump manufacturers and their suppliers. Working together to: train
Perkins Statewide Articulation Agreement. Documentation item: Secondary Competency Task List Coversheet
 Perkins Statewide Articulation Agreement Documentation item: Secondary Task List Coversheet The Secondary School agrees to: A. Implement the approved PDE Program(s) of Study. B. Provide assessment of student
Perkins Statewide Articulation Agreement Documentation item: Secondary Task List Coversheet The Secondary School agrees to: A. Implement the approved PDE Program(s) of Study. B. Provide assessment of student
EE 233 Circuit Theory Lab 3: First-Order Filters
 EE 233 Circuit Theory Lab 3: First-Order Filters Table of Contents 1 Introduction... 1 2 Precautions... 1 3 Prelab Exercises... 2 3.1 Inverting Amplifier... 3 3.2 Non-Inverting Amplifier... 4 3.3 Integrating
EE 233 Circuit Theory Lab 3: First-Order Filters Table of Contents 1 Introduction... 1 2 Precautions... 1 3 Prelab Exercises... 2 3.1 Inverting Amplifier... 3 3.2 Non-Inverting Amplifier... 4 3.3 Integrating
Astro-Physics Inc. 400QMD Lubrication/Maintenance Guide
 Astro-Physics Inc. 400QMD Lubrication/Maintenance Guide The following guidelines should be followed to lubricate the three main parts of the 400QMD mount. The QMD stands for Quartz Micro-Drive controller.
Astro-Physics Inc. 400QMD Lubrication/Maintenance Guide The following guidelines should be followed to lubricate the three main parts of the 400QMD mount. The QMD stands for Quartz Micro-Drive controller.
DREAM BIG ROBOT CHALLENGE. DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course.
 DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
4. BASIC OPERATION AND DESCRIPTION
 3. FEATURES Rugged high-impact plastic enclosure with aluminum sensor pole Powerful magnetic speaker with waterproof Mylar cone Lightweight, comfortably balanced for easy handling Easy view LCD display
3. FEATURES Rugged high-impact plastic enclosure with aluminum sensor pole Powerful magnetic speaker with waterproof Mylar cone Lightweight, comfortably balanced for easy handling Easy view LCD display
MOUNT KIT. Ford Super Duty F 250/350/450/ Installation Instructions CAUTION. Read this document before installing the snowplow.
 November 15, 2014 Lit. No. 64680, Rev. 04 33259 MOUNT KIT Ford Super Duty F 250/350/450/550 2005-07 Installation Instructions Read this document before installing the snowplow. See your sales outlet/web
November 15, 2014 Lit. No. 64680, Rev. 04 33259 MOUNT KIT Ford Super Duty F 250/350/450/550 2005-07 Installation Instructions Read this document before installing the snowplow. See your sales outlet/web
PREVIEW COPY. Table of Contents. Introduction to Schematics and Symbols...3. Lesson Two Symbols on Schematics...21
 Table of Contents Lesson One Introduction to Schematics and Symbols...3 Lesson Two Symbols on Schematics...21 Lesson Three Electrical Symbols...37 Lesson Four Electrical Diagrams...53 Lesson Five Lesson
Table of Contents Lesson One Introduction to Schematics and Symbols...3 Lesson Two Symbols on Schematics...21 Lesson Three Electrical Symbols...37 Lesson Four Electrical Diagrams...53 Lesson Five Lesson
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Exploring the Necessity of the Hot Hipot Test
 Exploring the Necessity of the Hot Hipot Test Introduction In an industry comprised of workers with varying electronics knowledge, a Hipot test can seem a daunting task for some. Indeed, many test operators
Exploring the Necessity of the Hot Hipot Test Introduction In an industry comprised of workers with varying electronics knowledge, a Hipot test can seem a daunting task for some. Indeed, many test operators
Read all instructions before using the log splitter, especially safety instructions.
 Operation manual for log splitter ELH500, ELH700, ELH1100, TRH700 och TRH1100 Read all instructions before using the log splitter, especially safety instructions. Faxes Fabriks AB Hestravägen 7 330 26
Operation manual for log splitter ELH500, ELH700, ELH1100, TRH700 och TRH1100 Read all instructions before using the log splitter, especially safety instructions. Faxes Fabriks AB Hestravägen 7 330 26
50 Gordon Drive, Rockland, Maine MOUNT KIT. Ford Super Duty F250/350/450/ Installation Instructions
 Fisher Engineering 50 Gordon Drive, Rockland, Maine 04841-2139 www.fisherplows.com October 1, 2007 Lit. No. 64689, Rev. 03 MOUNT KIT Ford Super Duty F250/350/450/550 2005-07 Installation Instructions Read
Fisher Engineering 50 Gordon Drive, Rockland, Maine 04841-2139 www.fisherplows.com October 1, 2007 Lit. No. 64689, Rev. 03 MOUNT KIT Ford Super Duty F250/350/450/550 2005-07 Installation Instructions Read
In this equation, P is the power output, V is the voltage, and I is the current. This is an important equation and it will be used repeatedly.
 Solar Fundamentals 0 people liked this 0 discussions READING ASSIGNMENT Fundamental Electrical Concepts You need to explore some fundamental concepts from electrical theory to understand how photovoltaic
Solar Fundamentals 0 people liked this 0 discussions READING ASSIGNMENT Fundamental Electrical Concepts You need to explore some fundamental concepts from electrical theory to understand how photovoltaic
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
The Active Heave Compensation (AHC) system makes the raising, lowering and handling of loads on floating vessels much safer and easier.
 system makes the raising, lowering and handling of loads on floating vessels much safer and easier.") Reducing the downtime of offshore operations to a minimum Rexroth hydraulic Active Heave Compensators The expression time is money is intensely relevant in the offshore, maritime and dredging sectors.
Reducing the downtime of offshore operations to a minimum Rexroth hydraulic Active Heave Compensators The expression time is money is intensely relevant in the offshore, maritime and dredging sectors.
35TON LOG SPLITTER Owner s Manual and Operating Instructions
 35TON LOG SPLITTER Owner s Manual and Operating Instructions GENERAL WARNINGS READ and UNDERSTAND this manual completely before using 35 Ton Log Splitter. Operator must read and understand all safety and
35TON LOG SPLITTER Owner s Manual and Operating Instructions GENERAL WARNINGS READ and UNDERSTAND this manual completely before using 35 Ton Log Splitter. Operator must read and understand all safety and
Application Case. Delta Industrial Automation Products for Vertical CNC Machining Centers with Automatic Tool Changers (ATC)
") Case Delta Industrial Automation Products for Vertical CNC Machining Centers with Automatic Tool Changers (ATC) Issued by Solution Center Date July, 2014 Pages 5 Applicable to Key words NC311 Series CNC
Case Delta Industrial Automation Products for Vertical CNC Machining Centers with Automatic Tool Changers (ATC) Issued by Solution Center Date July, 2014 Pages 5 Applicable to Key words NC311 Series CNC
MOUNT KIT. Nissan Titan XD. Installation Instructions CAUTION. Read this document before installing the snowplow. CAUTION
 September 1, 2017 Lit. No. 76667, Rev. 00 35067 MOUNT KIT Nissan Titan XD 2018 - Installation Instructions Read this document before installing the snowplow. See your sales outlet/website for specific
September 1, 2017 Lit. No. 76667, Rev. 00 35067 MOUNT KIT Nissan Titan XD 2018 - Installation Instructions Read this document before installing the snowplow. See your sales outlet/website for specific
JARVIS. Model H080 Carcass Splitting Band Saw
 Carcass Splitting Band Saw EQUIPMENT SELECTION... Ordering No. TABLE OF CONTENTS... Page... See Table 1, Page 4 Balancer... 4042042 Band Saw Blade... 1023099 Notice to Employer and Safety Director... 2
Carcass Splitting Band Saw EQUIPMENT SELECTION... Ordering No. TABLE OF CONTENTS... Page... See Table 1, Page 4 Balancer... 4042042 Band Saw Blade... 1023099 Notice to Employer and Safety Director... 2
I like to call this robot a rover, as I tried to pattern it after NASA s designs. Figure 1-1 shows the general outline of the finished rover.
 1 The task of building a robot is unlike any other in computer science. It s a strange amalgamation of computer, electrical, and mechanical engineering. Being able to program is great (and necessary),
1 The task of building a robot is unlike any other in computer science. It s a strange amalgamation of computer, electrical, and mechanical engineering. Being able to program is great (and necessary),
Mechatronics-Level 1
 Measuring What Matters in Job Ready Assessment Blueprint Mechatronics-Level 1 Test Code: 2040 / Version: 01 Copyright 2012 General Assessment Information General Assessment Information Written Assessment
Measuring What Matters in Job Ready Assessment Blueprint Mechatronics-Level 1 Test Code: 2040 / Version: 01 Copyright 2012 General Assessment Information General Assessment Information Written Assessment
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, August 18, ISSN
 AUTOMATION AND ROBOTICS IN INTELLIGENT ENVIRONMENT Prof. Y. P. Rao, Pravat Nayak & Gyanesh Dubey Mechanical Engineering Department, Electronics Maintenances, HR & PSD RVS College of Engineering & Technology,
AUTOMATION AND ROBOTICS IN INTELLIGENT ENVIRONMENT Prof. Y. P. Rao, Pravat Nayak & Gyanesh Dubey Mechanical Engineering Department, Electronics Maintenances, HR & PSD RVS College of Engineering & Technology,
MOUNT KIT PERSONAL PLOW
 May 15, 2016 Lit. No. 29230, Rev. 01 MOUNT KIT PERSONAL PLOW Jeep Grand Cherokee 2005-10 Installation Instructions Read this document before installing the snowplow. See your sales outlet/website for specific
May 15, 2016 Lit. No. 29230, Rev. 01 MOUNT KIT PERSONAL PLOW Jeep Grand Cherokee 2005-10 Installation Instructions Read this document before installing the snowplow. See your sales outlet/website for specific
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Bakiss Hiyana binti Abu Bakar JKE, POLISAS BHAB
 1 Bakiss Hiyana binti Abu Bakar JKE, POLISAS 1. Explain AC circuit concept and their analysis using AC circuit law. 2. Apply the knowledge of AC circuit in solving problem related to AC electrical circuit.
1 Bakiss Hiyana binti Abu Bakar JKE, POLISAS 1. Explain AC circuit concept and their analysis using AC circuit law. 2. Apply the knowledge of AC circuit in solving problem related to AC electrical circuit.
CNC Using the FlexiCam CNC and HMI Software. Guldbergsgade 29N, P0 E: T:
 CNC Using the FlexiCam CNC and HMI Software Guldbergsgade 29N, P0 E: makerlab@kea.dk T: +46 46 03 90 This grey box is the NC controller. Let s start by turning the red switch to the ON position, then press
CNC Using the FlexiCam CNC and HMI Software Guldbergsgade 29N, P0 E: makerlab@kea.dk T: +46 46 03 90 This grey box is the NC controller. Let s start by turning the red switch to the ON position, then press
WebSeminar: Signal Chain Overview
 WebSeminar: December, 2005 Hello, and welcome to the Microchip Technology Web Seminar overview of signal chains. My name is Kevin Tretter and I am a Product Marketing Engineer within Microchip Technology
WebSeminar: December, 2005 Hello, and welcome to the Microchip Technology Web Seminar overview of signal chains. My name is Kevin Tretter and I am a Product Marketing Engineer within Microchip Technology
Telemetry System. Semester 3rd. Chapter-1 Telemetry Principles. Prof Z D Mehta Instrumentation and control Department Government Polytechnic Ahmedabad
 Telemetry System Semester 3rd Chapter-1 Telemetry Principles Prof Z D Mehta Instrumentation and control Department Government Polytechnic Ahmedabad [Type text] Page 0 Telemetry Principles What is Telemetry?
Telemetry System Semester 3rd Chapter-1 Telemetry Principles Prof Z D Mehta Instrumentation and control Department Government Polytechnic Ahmedabad [Type text] Page 0 Telemetry Principles What is Telemetry?
b+m Training Maintenance
 b+m Training Maintenance Welcome to the training center of b+m Operating the Robot // T1-T2-BR 4 Robots are our passion yours as well? Do you want to stay up-to-date with the latest technology and expand
b+m Training Maintenance Welcome to the training center of b+m Operating the Robot // T1-T2-BR 4 Robots are our passion yours as well? Do you want to stay up-to-date with the latest technology and expand
The CyberSeat. A computer-driven consumer product for simulation A multi-media and internet-related project. Copyright Transforce Developments Ltd 1
 The CyberSeat A computer-driven consumer product for simulation A multi-media and internet-related project Copyright Transforce Developments Ltd 1 What is The CyberSeat? An exciting, durable, silent, extremely
The CyberSeat A computer-driven consumer product for simulation A multi-media and internet-related project Copyright Transforce Developments Ltd 1 What is The CyberSeat? An exciting, durable, silent, extremely
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
UNIT 11: PAINTING, STAINING, AND FINISHING
 KEY CONCEPTS 1. Equipment needed 2. Primary kinds of Paint: Interior/Exterior 3. Primary kinds of Stain: Interior/Exterior 4. Proper application techniques: Paint/Stain/Finish 5. Equipment care and clean
KEY CONCEPTS 1. Equipment needed 2. Primary kinds of Paint: Interior/Exterior 3. Primary kinds of Stain: Interior/Exterior 4. Proper application techniques: Paint/Stain/Finish 5. Equipment care and clean
Copeland Digital Scroll
 Copeland Digital Scroll Technology & Advantages Presented by: Bruce Hilsabeck Application Engineer Copeland Australia / New Zealand Introduction 1. Scroll Compressor Basics 2. Digital Compressor Technology
Copeland Digital Scroll Technology & Advantages Presented by: Bruce Hilsabeck Application Engineer Copeland Australia / New Zealand Introduction 1. Scroll Compressor Basics 2. Digital Compressor Technology
JARVIS. Model Brisket Scissor EQUIPMENT... TABLE OF
 Model 423-17 Brisket Scissor EQUIPMENT SELECTION... Ordering No. TABLE OF CONTENTS... Page Model 423--17... 4037003 Air Filter / Regulator / Lubricator 3022003 Air Hose Assembly... 3059018 Balancer...
Model 423-17 Brisket Scissor EQUIPMENT SELECTION... Ordering No. TABLE OF CONTENTS... Page Model 423--17... 4037003 Air Filter / Regulator / Lubricator 3022003 Air Hose Assembly... 3059018 Balancer...
The DeltaGrip System. Safety and Operating Instructions. Trigger. Air Supply Connection. Handle Assembly. Air Line Assembly.
 The DeltaGrip System Safety and Operating Instructions Trigger Air Supply Connection Handle Assembly Air Line Assembly Punch Die Pneumatic Diaphragm Assembly Shackle, Pin & Jam Nut Jaw Frame Shoulder Screw
The DeltaGrip System Safety and Operating Instructions Trigger Air Supply Connection Handle Assembly Air Line Assembly Punch Die Pneumatic Diaphragm Assembly Shackle, Pin & Jam Nut Jaw Frame Shoulder Screw
Care of Bonsai Tools
 Technical Care of Bonsai Tools Written, Illustrated, and First Published in the 1960's by John Patrick of the New Orleans Bonsai Society First Reprinted in the Journal in March, 1987 Edited by Norman Haddrick
Technical Care of Bonsai Tools Written, Illustrated, and First Published in the 1960's by John Patrick of the New Orleans Bonsai Society First Reprinted in the Journal in March, 1987 Edited by Norman Haddrick
MODEL C-71-5 TWO-MAN EARTH DRILL
 DO NOT THROW AWAY IMPORTANT MANUAL MODEL TWO-MAN EARTH DRILL Operator s Manual P.O.BOX 290 San Bernardino, CA. 92402 Phone (909) 478-5700 Fax (909) 478-5710 (800) 922-4680 E-mail: sales@groundhoginc.com
DO NOT THROW AWAY IMPORTANT MANUAL MODEL TWO-MAN EARTH DRILL Operator s Manual P.O.BOX 290 San Bernardino, CA. 92402 Phone (909) 478-5700 Fax (909) 478-5710 (800) 922-4680 E-mail: sales@groundhoginc.com
CHAPTER 7 FAULT DIAGNOSIS OF CENTRIFUGAL PUMP AND IMPLEMENTATION OF ACTIVELY TUNED DYNAMIC VIBRATION ABSORBER IN PIPING APPLICATION
 125 CHAPTER 7 FAULT DIAGNOSIS OF CENTRIFUGAL PUMP AND IMPLEMENTATION OF ACTIVELY TUNED DYNAMIC VIBRATION ABSORBER IN PIPING APPLICATION 7.1 INTRODUCTION Vibration due to defective parts in a pump can be
125 CHAPTER 7 FAULT DIAGNOSIS OF CENTRIFUGAL PUMP AND IMPLEMENTATION OF ACTIVELY TUNED DYNAMIC VIBRATION ABSORBER IN PIPING APPLICATION 7.1 INTRODUCTION Vibration due to defective parts in a pump can be
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
TABLE OF CONTENTS. SI No Contents Page No.
 TABLE OF CONTENTS SI No Contents Page No. 1 Basic Textile wet Processing Terms 1 2 Sequence of operations in Wet processing of Knitted fabric 2 3 Brief Note on soft flow dyeing 3 4 Details of soft flow
TABLE OF CONTENTS SI No Contents Page No. 1 Basic Textile wet Processing Terms 1 2 Sequence of operations in Wet processing of Knitted fabric 2 3 Brief Note on soft flow dyeing 3 4 Details of soft flow
Basic Principles and Operation of Transformer
 Basic Principles and Operation of Transformer CONSTRUCTIONAL ASPECTS Cores In order to enhance core s magnetic properties, it is constructed from an iron and silicon mixture (alloy). The magnetic core
Basic Principles and Operation of Transformer CONSTRUCTIONAL ASPECTS Cores In order to enhance core s magnetic properties, it is constructed from an iron and silicon mixture (alloy). The magnetic core
Name & SID 1 : Name & SID 2:
 EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Electrical Measurements
 Electrical Measurements INTRODUCTION In this section, electrical measurements will be discussed. This will be done by using simple experiments that introduce a DC power supply, a multimeter, and a simplified
Electrical Measurements INTRODUCTION In this section, electrical measurements will be discussed. This will be done by using simple experiments that introduce a DC power supply, a multimeter, and a simplified
9/28/2010. Chapter , The McGraw-Hill Companies, Inc.
 Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Easy-To-Use Graphic Interface
 Graphical Robot Programming Teachbox for Robot W 711 The Wittmann CNC 6.2 robot control with color graphics screens allows simpler robot teaching and use than ever before. The operator simply traces out
Graphical Robot Programming Teachbox for Robot W 711 The Wittmann CNC 6.2 robot control with color graphics screens allows simpler robot teaching and use than ever before. The operator simply traces out
Resonance Tube. 1 Purpose. 2 Theory. 2.1 Air As A Spring. 2.2 Traveling Sound Waves in Air
 Resonance Tube Equipment Capstone, complete resonance tube (tube, piston assembly, speaker stand, piston stand, mike with adapters, channel), voltage sensor, 1.5 m leads (2), (room) thermometer, flat rubber
Resonance Tube Equipment Capstone, complete resonance tube (tube, piston assembly, speaker stand, piston stand, mike with adapters, channel), voltage sensor, 1.5 m leads (2), (room) thermometer, flat rubber
Trumpet Wind Controller
 Design Proposal / Concepts: Trumpet Wind Controller Matthew Kelly Justin Griffin Michael Droesch The design proposal for this project was to build a wind controller trumpet. The performer controls the
Design Proposal / Concepts: Trumpet Wind Controller Matthew Kelly Justin Griffin Michael Droesch The design proposal for this project was to build a wind controller trumpet. The performer controls the
OXDALE PRODUCT LTD OPERATING AND MAINTENANCE MANUAL TM400 AND TM400 BIG BASE LOG SPLITTER KEEP FOR FUTURE USE
 OXDALE PRODUCT LTD OPERATING AND MAINTENANCE MANUAL TM400 AND TM400 BIG BASE LOG SPLITTER KEEP FOR FUTURE USE 1 CONTENTS Safety 3 Labels 5 Quick Guide 6 In Depth Instructions 8 Operating Instructions 12
OXDALE PRODUCT LTD OPERATING AND MAINTENANCE MANUAL TM400 AND TM400 BIG BASE LOG SPLITTER KEEP FOR FUTURE USE 1 CONTENTS Safety 3 Labels 5 Quick Guide 6 In Depth Instructions 8 Operating Instructions 12
Direct Current Motor Electrical Evaluation Using Motor Circuit Analysis
 Direct Current Motor Electrical Evaluation Using Motor Circuit Analysis Introduction Howard W. Penrose, Ph.D BJM Corp, ALL-TEST Division Old Saybrook, CT Electrical testing of Direct Current (DC) electric
Direct Current Motor Electrical Evaluation Using Motor Circuit Analysis Introduction Howard W. Penrose, Ph.D BJM Corp, ALL-TEST Division Old Saybrook, CT Electrical testing of Direct Current (DC) electric
Robotics II DESCRIPTION. EXAM INFORMATION Items
 EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
CARL HANSER VERLAG. Herbert Rees. Mold Engineering 2nd edition
 CARL HANSER VERLAG Herbert Rees Mold Engineering 2nd edition 3-446-21659-6 www.hanser.de 3 1 Introduction to Mold Engineering Mold Engineering deals with injection molds for thermoplastic molding materials.
CARL HANSER VERLAG Herbert Rees Mold Engineering 2nd edition 3-446-21659-6 www.hanser.de 3 1 Introduction to Mold Engineering Mold Engineering deals with injection molds for thermoplastic molding materials.
Electrical Components and their Functions
 Electrical Components and their Functions Electricity & Electronics All electrical appliances and electronic devices depend on electrical circuits. The main difference between electricity & electronics
Electrical Components and their Functions Electricity & Electronics All electrical appliances and electronic devices depend on electrical circuits. The main difference between electricity & electronics
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
25 TONNE HYDRAULIC PRESS MODEL NO: AHP 26
 WARNING: Read these instructions before using the machine 25 TONNE HYDRAULIC PRESS MODEL NO: AHP 26 PART NO: 7615115 OPERATION & MAINTENANCE INSTRUCTIONS LS1211 INTRODUCTION Thank you for purchasing this
WARNING: Read these instructions before using the machine 25 TONNE HYDRAULIC PRESS MODEL NO: AHP 26 PART NO: 7615115 OPERATION & MAINTENANCE INSTRUCTIONS LS1211 INTRODUCTION Thank you for purchasing this
MOUNT KIT. Dodge Ram 2500/3500 (All) Dodge Ram 2500/3500 (Gasoline only) Installation Instructions CAUTION
 Dodge Ram 2500/3500 (Gasoline only) Installation Instructions CAUTION") November 15, 2014 Lit. No. 41376, Rev. 05 33884 MOUNT KIT Dodge Ram 2500/3500 (All) 2010-12 Dodge Ram 2500/3500 (Gasoline only) 2013 - Installation Instructions Read this document before installing the
November 15, 2014 Lit. No. 41376, Rev. 05 33884 MOUNT KIT Dodge Ram 2500/3500 (All) 2010-12 Dodge Ram 2500/3500 (Gasoline only) 2013 - Installation Instructions Read this document before installing the
A3 Pro INSTRUCTION MANUAL. Oct 25, 2017 Revision IMPORTANT NOTES
 A3 Pro INSTRUCTION MANUAL Oct 25, 2017 Revision IMPORTANT NOTES 1. Radio controlled (R/C) models are not toys! The propellers rotate at high speed and pose potential risk. They may cause severe injury
A3 Pro INSTRUCTION MANUAL Oct 25, 2017 Revision IMPORTANT NOTES 1. Radio controlled (R/C) models are not toys! The propellers rotate at high speed and pose potential risk. They may cause severe injury
Electrical Theory. Power Principles and Phase Angle. PJM State & Member Training Dept. PJM /22/2018
 Electrical Theory Power Principles and Phase Angle PJM State & Member Training Dept. PJM 2018 Objectives At the end of this presentation the learner will be able to: Identify the characteristics of Sine
Electrical Theory Power Principles and Phase Angle PJM State & Member Training Dept. PJM 2018 Objectives At the end of this presentation the learner will be able to: Identify the characteristics of Sine
CNC Machining Center BAZ 895n IQ
 CNC Machining Center BAZ 895n IQ * Due to the continuous improvements of our products, some machine changes may apply. Features Use of SYNTEC control system, fully automatic production from labeling, loading,
CNC Machining Center BAZ 895n IQ * Due to the continuous improvements of our products, some machine changes may apply. Features Use of SYNTEC control system, fully automatic production from labeling, loading,