Robotics. Lecturer: Dr. Saeed Shiry Ghidary
|
|
|
- Thomasina Richards
- 6 years ago
- Views:
Transcription
1 Robotics Lecturer: Dr. Saeed Shiry Ghidary
2 Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis on research in and applications of autonomous mobile robots
3 Method The course consists of Lectures with discussions, Homework assignments, Reading assignments, One of these assignments might involve a (group) project.
4 Course Requirements Each student will: Explore and present a topic in depth, Carry out a small-scale research project, such as a software simulation or a mathematical model. Pass exams and tests.
5 Grading Scheme The grade will break down as follows: Classroom presence and participation: 5% Paper presentation 25% Assignments: 10% Research project: 35% Exams 25% An extra bonus for creative students
6 Text Book The following are suggested readings: Introduction to robotics mechanics and control, second edition. By JOHN J. CRAIG, Addison Wesley, Modeling and control of robot manuplators. By Lorenzo Sciavicco & Bruno Siciliano. McGraw Hill, 1996.
7 Content of the Course Lectures: Introduction Kinematics Inverse kinematics Dynamics Trajectory generation Robot programming languages
8 Content of the Course Presentations: Mobile robot kinematics Perception Mobile robot localization Obstacle avoidance Planning and navigation Sensor fusion Humanoid and legged robots
9 What Is Robotics? Robotics is the intelligent connection of perception to action. Or simply the science of dealing with robots.
10 What Is Robot? ISO, the international standard organization, have formulated the following definition with respect to robots and manipulators Manipulating industrial robot is an automatically controlled, re-programmable, multi-purpose, manipulative machine with several degrees of freedom, which may be either fixed in place or mobile for use in industrial automation applications
11 What Is a Robot? By general agreement a robot is: A programmable machine that imitates the actions or appearance of an intelligent creature usually a human.
12 What Is a Robot? To qualify as a robot, a machine must have the ability for: Sensing and perception: get information from its surroundings. Carry out different tasks: locomotion or manipulation, do something physical such as move or manipulate objects. Re-programmable: can do different things. Function autonomously and/or interact with human beings.
13 Robotics As an Interdisciplinary Science Arts, Politics, Economics, Mathematics, Physics, Control-theory, Cybernetics, Computer science, Artificial Intelligence, Biology, Psychology, Sociology, Social-Psychology, Philosophy, Artificial life, Sports
14 Historical Overview Leonardo da Vinci created many robot-like sketches and designs in the 1500 s. In 1920, the word robot was first used in a play by Karel Capek entitled Rossum s universal robots performed in Paris. In this play small artificial creatures strictly obeyed their master s orders. In Czech and Russian they were called Robotnic, from Robota meaning hard work and drudgery.

15 Historical Overview In 1950, Isaac Asimov introduced the idea of good robots (androids) in his stories and popularized the word robotics. The first robots were thought to be evil human-looking machines.
16 First Industrial Robots Robot manipulators were first realized in 1945 with the onset of nuclear age. In 1961 George C. Devol obtains the first U.S. Robot patent, no. 2,998,237. Joe Engelberger formed Unimation and was the first to market robots. In fact Joseph Engleberger and George Devol were the fathers of industrial robots the first PUMA (programmable universal machine for assembly) robot is developed by Unimation for general motors.
17 Impact Robotics offers benefits such as high reliability, accuracy, and speed of operation. Advantages of industrial robots. Flexibility in production. High productivity. Improve quality of products. Improve quality of human life (safety of personnel) by performing the undesirable jobs.
18 Asimov s Laws of Robotics Asimov invented the three laws of robotics: Robotics offers benefits such as high reliability, accuracy, and speed of operation. A robot may not injure a human being or, through inaction, allow a human being to come to harm. A robot must obey the orders given it by human beings except where such orders conflict with the first law. A robot must protect its own existence as long as such protection does not conflict with the first or second law.
19 Why Use Robots? Application in 4D environments Dangerous Dirty Dull Difficult Application 4A tasks Automation Augmentation Assistance Autonomous
20 Applications of Robotics Service robots Automatic cleaning of (large) areas Client support Agricultural Hazard environments Construction and demolishing Space Military Forests Material Handling Safety Civil Transportation Elderly and Handicapped Entertainment
21 Elements of a Robot System The mechanical structure comprises the links of a manipulator or the body and wheels of a mobile robot. The actuators cause the robot to move. Sensors measure robot motion and sense a robot s environment. A computer controller reads sensors, sends control signals to actuators, interacts with command.



22 Types of Robots Robot Manipulators Mobile Manipulators
23 Trends in Robotics Classical Robotics (mid-70 s) exact models no sensing necessary Hybrids (since 90 s) model-based at higher levels reactive at lower levels Reactive Paradigm (mid-80 s) no models relies heavily on good sensing Probabilistic Robotics (since mid-90 s) integration of models and sensing inaccurate models, inaccurate sensors
24 Industrial Robot Manipulator is a machine, the mechanism of which usually consists of a series of segments jointed or sliding relative to one another, for the purpose of grasping and/or moving objects (pieces or tools) usually in several degrees of freedom.
25 Industrial Robot
26 Robot Parts Base Shoulder Elbow Wrist Tool-plate End-effecter (not shown)
27 How are they used Industrial robots 70% welding and painting 20% pick and place 10% others Research focus on Manipulator control End-effectors design Compliance device Robot hand Visual and force feedback Flexible automation

28 Installed Industrial Robots Japan take the lead, why? Shortage of labor, high labor cost


29 Common Robot Designs Cartesian. Robots which have three linear (P, as opposed to rotational R joints) axes of movement (X, Y, Z). Used for pick and place tasks and to move heavy loads. They can trace out rectangular volumes in 3D space. Cartesian: PPP
. These robots are commonly used in assembly tasks and can trace out concentric cylinders in 3D space. Cylindrical: RPP")
30 Common robot designs Cylindrical The positions of these robots are controlled by a radius, a height and an angle (that is, two P joints and one R joint). These robots are commonly used in assembly tasks and can trace out concentric cylinders in 3D space. Cylindrical: RPP


31 Common robot designs Spherical Spherical robots have two rotational R axes and one transnational P (radius) axis. The robots endeffectors can trace out concentric spheres in 3D space. Spherical: RRP

.")
32 Common Robot Designs Articulated. The positions of articulated robots are controlled by three angles, via R joints. These robots resemble the human arm (anthropomorphic). They are the most versatile robots,but also the most difficult to program. Articulated: RRR


33 Common Robot Designs SCARA (selective compliance articulated robot arm). SCARA robots are a blend of the articulated and cylindrical robots. The robot arm unit can move up and down, and at an angle around the axis of the cylinder, but the arm itself is jointed like a revolute coordinate robot to allow precise and rapid positioning. It consists of three R and one P joints. SCARA: RRP
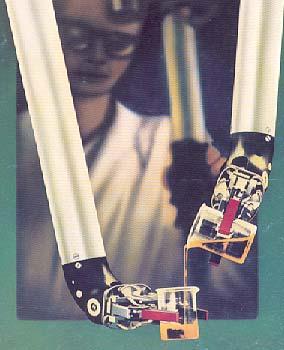
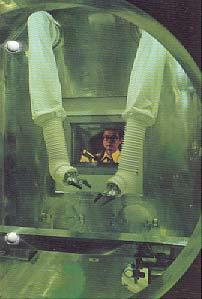
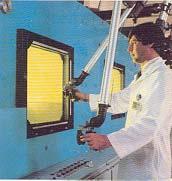
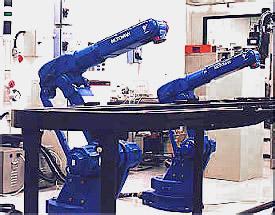
34 Master/slave Manipulators

35 Parallel Robots Parallel robots have many legs with active and passive joints and links, supporting the load in parallel. Can handle higher loads with greater accuracy, higher speeds, and lighter robot weight;

36 Parallel Robots Workspace of parallel robots is severely restricted compared to equivalent serial robots. Are used in expensive flight simulators, as machining tools, and can be used for highaccuracy, high-repeatability, high-precision robotic surgery
37 Technical Terms in Robotics Speed. The amount of distance per unit time at which the robot can move. M/s. Load bearing capacity (pay load). The maximum weight-carrying capacity of the robot. Accuracy. The ability of a robot to position itself to the desired location with the minimal error (example: 0.001inch).

38 Technical Terms in Robotics Repeatability. The ability of a robot to repeatedly position itself when asked to perform a task multiple times. Work envelope. The maximum reach, or volume within which a robot can operate.
39 Robot Power Sources/actuators Electric motors (DC servomotors). Uses electric motors to position the robot. These robots can be accurate, but are limited in their load-bearing capacity. Hydraulic cylinders (fluid pressure). It can carry very heavy objects, but may not be very accurate. Pneumatic cylinders (air pressure). It is similar to one with a hydraulic drive system; It can carry less weight, but is more compliant (less rigid to disturbing forces).
40 End Effectors Grippers. Grippers are the most common end-effectors. They provide the equivalent of a thumb and an opposing finger, allowing the robot to grasp small parts and manipulate them. Machine tools. Robot end-effectors can also be machine tools such as drills, grinding wheels, cutting wheels and sanders.
41 End Effectors Measuring Instruments Allow the robot to precisely measure parts by running the arm lightly over the part using a measuring probe or gauge. Laser & Water Jet Cutters Use high-intensity laser beams or high-pressure abrasive water jets to cut sheet metal or fiberglass parts to shape. Welding Torches Allow robots to weld parts together. These end-effectors are widely used in the automotive industry.
42 Smart Robot Sensors Vision. Used commonly in electronics assembly to place expensive circuit chips accurately through holes in the circuit boards. Voice. Useful in training the robots. Tactile. Sensors that provide the robot with the ability to touch and feel.
43 Smart Robot Sensors Force/Pressure Help the robot auto-correct for misalignments, or to sense the distribution of loads on irregular geometry. Can be used in conjunction with haptic interfaces to allow the human operator to feel what the robot is exerting on the environment during tele-operation tasks. Proximity Allow the robots to detect the presence of objects that are very close to the arm before the arm actually contacts the objects.
44 Smart Robot Sensors Other sensors Limit Switches Encoder (measures angle) Potentiometer (measures angle or length) LVDT (linear variable displacement transducer, measures length) Strain gauge (measures deflection) Ultrasonic sensor (measures distance) Infrared sensor (measures distance) Light sensor (detects presence)
45 Autonomous Mobile Robots Mobile robots have wheels, legs, or other means to navigate around the workspace under control. An autonomous robot is a machine that operates in a partially unknown and unpredictable environment.

46 Autonomous Mobile Robots Autonomous robots cannot always be programmed to execute predefined actions. These robots require good sensors to see the workspace, avoid collisions,and get the job done.
47 Mobile Robot Functional characteristics: Mobility: Total mobility relative to the environment A certain level of autonomy: Perception ability: Sensing and reacting in the environment
48 The Three Key Questions in Mobile Robotics Where am I? Robot localization Where am I going? Goal determination How do I get there? Motion planning
49 The Three Key Questions in Mobile Robotics To answer these questions the robot has to: Have a model of the environment (given or autonomously built) Perceive and analyze the environment Find its position within the environment Plan and execute the movement
50 Architecture of Robotic Systems Environmental sensors Motion planner Controller Mechanical Structure Mechanical Structure Kinematics model Dynamics model Configuration sensor Actuators: Electrical, Hydraulic, Pneumatic, Artificial Muscle Computation and controllers Sensors Communications User interface Power conversion unit
51 Humanoid Humanoid is an autonomous robot with human-like form and abilities. The autonomous humanoid combines advanced manipulation skills with human-like cognitive processes so as to be able to operate in unchanged man-made environments. There is much current research work aimed at creating human-like robots that can walk, talk, think, see, touch, etc.

52 RoboCup An international research and education which encourages investigation in the fields of robotics and artificial intelligence using game of soccer. It focuses on developing cooperation among autonomous agents in a dynamic multi-agent environment. The dream of the RoboCup: By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team.
53 Summary Robotics:interdisciplinary research Mechanical design Computer science and engineering Electrical engineering Cognitive psychology, perception and neuroscience Research open problems Manipulation, Locomotion Control, Navigation Human-Robot Interaction Learning & Adaptation (AI)
54 Next Course: Kinematics
An Introduction to Robotics. Dr. Bob Williams, Mechanical Engineering, Ohio University. Table of Contents
 An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
An Introduction to Robotics
 An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University EE/ME 4290/5290 Mechanics and Control of Robotic Manipulators 2018 Dr. Bob Productions Introduction
An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University EE/ME 4290/5290 Mechanics and Control of Robotic Manipulators 2018 Dr. Bob Productions Introduction
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
, TECHNOLOGY. SAULT COLLEGE OF APPLIED ARTS SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: ROBOTIC & CONTROL SYSTEMS
 SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Design and Analysis of Articulated Inspection Arm of Robot
 VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
A Brief Survey on Robotics
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Chapter 14 Automation of Manufacturing Processes and Systems
 Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Robotics: Robot. Robotics
 Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
FABRICATION OF PNEUMATIC PICK AND PLACE ROBOT
 International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 7, July 2017, pp. 594 600, Article ID: IJCIET_08_07_063 Available online at http://www.ia aeme.com/ijciet/issues.asp?jtype=ijciet&vtyp
International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 7, July 2017, pp. 594 600, Article ID: IJCIET_08_07_063 Available online at http://www.ia aeme.com/ijciet/issues.asp?jtype=ijciet&vtyp
ROBOTICS THE INTELLIGENT CONNECTION OF THE PERCEPTION TO ACTION.
 ROBOTICS THE INTELLIGENT CONNECTION OF THE PERCEPTION TO ACTION. A robot is defined in many ways: "A reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized
ROBOTICS THE INTELLIGENT CONNECTION OF THE PERCEPTION TO ACTION. A robot is defined in many ways: "A reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY
 INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
VTU NOTES QUESTION PAPERS NEWS RESULTS FORUMS
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
FUNDAMENTALS OF ROBOTICS
 FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
The Humanoid Robot ARMAR: Design and Control
 The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
Development Of a Simple Robot Arm Using Servo Motors
 Development Of a Simple Robot Arm Using Servo Motors June 2000 Oguz ASLANTÜRK, Research Assistant at Hacettepe University Dept. of Computer Science & Engineering e-mail: aslantur@hacettepe.edu.tr Ahmet
Development Of a Simple Robot Arm Using Servo Motors June 2000 Oguz ASLANTÜRK, Research Assistant at Hacettepe University Dept. of Computer Science & Engineering e-mail: aslantur@hacettepe.edu.tr Ahmet
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Tele-Operated Anthropomorphic Arm and Hand Design
 Tele-Operated Anthropomorphic Arm and Hand Design Namal A. Senanayake, Khoo B. How, and Quah W. Wai Abstract In this project, a tele-operated anthropomorphic robotic arm and hand is designed and built
Tele-Operated Anthropomorphic Arm and Hand Design Namal A. Senanayake, Khoo B. How, and Quah W. Wai Abstract In this project, a tele-operated anthropomorphic robotic arm and hand is designed and built
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Robots for Medicine and Personal Assistance. Guest lecturer: Ron Alterovitz
 Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1
 Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Richard Voyles Professor of Robotics School of Engineering Technology
 Richard Voyles Professor of Robotics School of Engineering Technology Unprecedented Optimism in Robotics & IOT! Education (all levels) Laypublic Government Leaders (jobs, innovation) Industry (buyers and
Richard Voyles Professor of Robotics School of Engineering Technology Unprecedented Optimism in Robotics & IOT! Education (all levels) Laypublic Government Leaders (jobs, innovation) Industry (buyers and
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Cognition & Robotics. EUCog - European Network for the Advancement of Artificial Cognitive Systems, Interaction and Robotics
 Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology
 ISSN No: 2454-9614 Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology S.Dineshkumar, M.Satheeswari, K.Moulidharan, R.Muthukumar Electronics and Communication Engineering,
ISSN No: 2454-9614 Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology S.Dineshkumar, M.Satheeswari, K.Moulidharan, R.Muthukumar Electronics and Communication Engineering,
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
GESTURE BASED ROBOTIC ARM
 GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING
 THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Automated Manufacturing
 Chapter 22 Automated Manufacturing LEARNING OBJECTIVES After studying this chapter, students will be able to: Define the term automation. Describe several automated production systems. Define the term
Chapter 22 Automated Manufacturing LEARNING OBJECTIVES After studying this chapter, students will be able to: Define the term automation. Describe several automated production systems. Define the term
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to