Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
|
|
|
- Jessie Hodges
- 6 years ago
- Views:
Transcription
1 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
2 Origin of Automation: replacing human muscle power 10,000 BC Stone tools used in early civilization: tools make better tools. Design of simple automation (150 BC) moving engine, Herons door etc. in Greece AD saw the creation of automatic dolls which could write, draw pictures etc. Punch cards used in power looms in France in 1801 for manufacture of textiles Joseph-Marie-Jacquard.


3 Automation in ancient Greece (150 BC) Steam engine Herons Door

4 Programmed textile loom: 1801 in France
5 Hard Automation in Ford Motor Company 1904 Idea of transfer lines in which a car was assembled at different stations. First use of hard automation alignment devices, transfer devices etc Henry Ford s mass production of vehicles in the USA.

6 Just for History! 1921 Karel Kapec s play depicting human like mechanical man - robots Isaac Asimov first used the term Robotics.


7 Origin of robots 1945 master slave manipulator made for radioactive material handling for the Atom Bomb project. A strictly mechanical device Motion transfer by wire rope and pulleys master slave
8 What changed everything? Mechanical systems became electro-mechanical!

9 What changed everything? Microprocessor (1949) : concept of reprogram! SHAKY : First robot- Stanford University George Dovel : teach / play back devices for NC machines/ robots.

10 Clumsy robots to sophisticated humanoids

11 Evolution of NC technology
12 Flexible Manufacturing System

13 Computer integrated manufacturing
14 Automated material handling
15 What is the definition of a Robot? Nobody seems to agree! To be called a robot it should do some or all of the following: - move around - sense and manipulate the environment. - display intelligent behavior Is a CNC machine a Robot?
16 Differences between Robotics and Automation? Robotics focuses on systems incorporating sensors and actuators that operate autonomously or semiautonomously in cooperation with humans. Robotics research emphasizes intelligence and adaptability to cope with unstructured environments. Automation research emphasizes efficiency, productivity, quality, and reliability, focusing on systems that operate autonomously, often in structured environments over extended periods, and on the explicit structuring of such environments.
17 Three generations of robotics / engineering First generation of robots: simple pick and place devices with no external sensors. Second generation robots: external Sensors (vision, tactile, etc) for interaction with the environment. Third generation robots: intelligence, smart materials, bio, etc. Future robots: bio-robots, micro, nano, cybogs, aneroids etc.

18 First Generation Robots : NC technology Simple motion capabilities for pick and place applications Robots made of revolute joints actuated by open loop or closed loop control.
19 Second generation of robots ( ) Electronics: smaller, faster and cheaper processors External sensors : interaction with the environment - vision - advanced sensors : gyros, inclination, force, slip. - advanced controllers : microcontroller, DSP - speech recognition - AI
20 Third generation robots New materials smart materials, smart actuators. Interest in emulating biological design paradigms. New areas like: Micro, Nano-robotics, Vision, bio-robotics, etc.
21 Actuation in robots/numerical Control Size Effect??
22 Future robots ---???? Bio-robotics: emulating biology, Micro, Nano. Exoskeletons: wearable devices. Neuro robotics: cyborgs, aneroids. Robotic drugs : nano robots for curing diseases, surgery. Assistive / Rehabilitation robotics. Outer space / nuclear applications Defense: soldier, autonomous armaments. Replacement of body functions: artificial muscles. IOT, CPS????

23 Future?? 2016 Micro robot drugs to cure diseases Fig. Killing viruses or bacteria

24 Micro Robot Surgeon for bypass surgery!
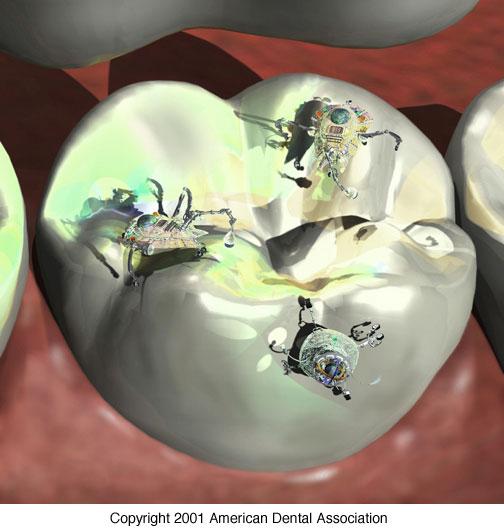
25 Micro-robot Dentist!

26 Micro Robotic Hair Cut!

27 Hand with no joints : Artificial muscles Five finger hand with artificial muscles (EAP)


28 Snake, bird made of artificial muscles Emulating biology

29 Social robots
 Univ.")
30 Robots for rehabilitation Fig. HAL (Human assistive locomotion) Univ. of Tsukuba, Japan

31 Physical therapy for stroke patients

32 Recover after surgery or stroke

33 Autonomous transport

34 Happy robot or sad robot??

35 Brain Computer Interfaces

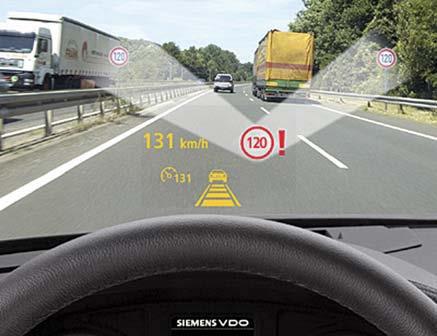
36 Automatic road tracking

37 Driver tracking

38 Ethics, laws etc.
39 Lastly we need to remember: One robot can do the task of a hundred men but a hundred robots cannot do the task of one extraordinary man.
40 Robot Joints and work volume Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering IIT Kanpur, INDIA

41 Robot arm = links + joints + sensors + actuators
42 Prismatic joint : DOF 1
43 Revolute (DOF 1) / Cylindrical joint (DOF 2) Fig. Revolute Fig. Cylindrical
44 Spherical joint : DOF 3
45 Work Volume Volume inside which the robot can position its gripper. The job to be performed must be inside the work volume.
46 Cartesian robot
47 Cylindrical robot
48 Articulated
49 SCARA
50 How to decide How many degrees of freedom are required for a task? Link lengths? (for humans??) Link velocities during control??
51 Thank you
52 THANK YOU
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Android (Child android)
") Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Chapter 14 Automation of Manufacturing Processes and Systems
 Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Surgical Assist Devices & Systems aka Surgical Robots
 Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Automation and Mechatronics Engineering Program. Your Path Towards Success
 Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV)
") Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. 21 March 2018 Drawing Source: Edx, Delft University.
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. 21 March 2018 Drawing Source: Edx, Delft University.
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
FABRICATION OF PNEUMATIC PICK AND PLACE ROBOT
 International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 7, July 2017, pp. 594 600, Article ID: IJCIET_08_07_063 Available online at http://www.ia aeme.com/ijciet/issues.asp?jtype=ijciet&vtyp
International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 7, July 2017, pp. 594 600, Article ID: IJCIET_08_07_063 Available online at http://www.ia aeme.com/ijciet/issues.asp?jtype=ijciet&vtyp
ME 487 Mechatronics. Office: JH 515, Tel.: (505)
") ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
 A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.") WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck. What is a Robot The difference between a robot and a manipulator Run by
WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck. What is a Robot The difference between a robot and a manipulator Run by
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Breaking the Wall of Neurological Disorder. How Brain-Waves Can Steer Prosthetics.
 Miguel Nicolelis Professor and Co-Director of the Center for Neuroengineering, Department of Neurobiology, Duke University Medical Center, Duke University Medical Center, USA Breaking the Wall of Neurological
Miguel Nicolelis Professor and Co-Director of the Center for Neuroengineering, Department of Neurobiology, Duke University Medical Center, Duke University Medical Center, USA Breaking the Wall of Neurological
IIT PATNA PLACEMENT BROCHURE M.TECH MECHATRONICS
 IIT PATNA PLACEMENT BROCHURE 2017-2018 M.TECH MECHATRONICS CONTENTS 1. About Us 2. Course curriculum 3. Laboratory facilities 4. Student Profile 5. Research and Innovation 6. Workshops and Student activities
IIT PATNA PLACEMENT BROCHURE 2017-2018 M.TECH MECHATRONICS CONTENTS 1. About Us 2. Course curriculum 3. Laboratory facilities 4. Student Profile 5. Research and Innovation 6. Workshops and Student activities
EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
Implementation of a Self-Driven Robot for Remote Surveillance
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
Development of the Mechatronics Design course
 WELCOME TO THE PRESENTATION --------------------------------------------------------- Development of the Mechatronics Design course Dr. A. Mazid Monash University E-mail: Abdul.Mazid@eng.monash.edu.au
WELCOME TO THE PRESENTATION --------------------------------------------------------- Development of the Mechatronics Design course Dr. A. Mazid Monash University E-mail: Abdul.Mazid@eng.monash.edu.au
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics. Dr. Bob Williams, Mechanical Engineering, Ohio University. Table of Contents
 An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
Summary of the Report by Study Group for Higher Quality of Life through Utilization of IoT and Other Digital Tools Introduced into Lifestyle Products
 Summary of the Report by Study Group for Higher Quality of Life through Utilization of IoT and Other Digital Tools Introduced into Lifestyle Products 1. Problem awareness As consumers sense of value and
Summary of the Report by Study Group for Higher Quality of Life through Utilization of IoT and Other Digital Tools Introduced into Lifestyle Products 1. Problem awareness As consumers sense of value and
Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology
 ISSN No: 2454-9614 Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology S.Dineshkumar, M.Satheeswari, K.Moulidharan, R.Muthukumar Electronics and Communication Engineering,
ISSN No: 2454-9614 Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology S.Dineshkumar, M.Satheeswari, K.Moulidharan, R.Muthukumar Electronics and Communication Engineering,
AUOTOMATIC PICK AND PLACE ROBOT
 AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Les apports de la robotique collaborative en santé
 Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Technology trends in the digitalization era. ANSYS Innovation Conference Bologna, Italy June 13, 2018 Michele Frascaroli Technical Director, CRIT Srl
 Technology trends in the digitalization era ANSYS Innovation Conference Bologna, Italy June 13, 2018 Michele Frascaroli Technical Director, CRIT Srl Summary About CRIT Top Trends for Emerging Technologies
Technology trends in the digitalization era ANSYS Innovation Conference Bologna, Italy June 13, 2018 Michele Frascaroli Technical Director, CRIT Srl Summary About CRIT Top Trends for Emerging Technologies
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
ROBOTICS & EMBEDDED SYSTEMS
 ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
On Intelligence Jeff Hawkins
 On Intelligence Jeff Hawkins Chapter 8: The Future of Intelligence April 27, 2006 Presented by: Melanie Swan, Futurist MS Futures Group 650-681-9482 m@melanieswan.com http://www.melanieswan.com Building
On Intelligence Jeff Hawkins Chapter 8: The Future of Intelligence April 27, 2006 Presented by: Melanie Swan, Futurist MS Futures Group 650-681-9482 m@melanieswan.com http://www.melanieswan.com Building
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Wearable Robotics Funding Opportunities and Commercialization of Robotics and Mobility Systems Bruce Floersheim, Ph.D., P.E.
 Wearable Robotics Funding Opportunities and Commercialization of Robotics and Mobility Systems Bruce Floersheim, Ph.D., P.E. www.wearablerobotics.com Help shape a global future leveraging technology in
Wearable Robotics Funding Opportunities and Commercialization of Robotics and Mobility Systems Bruce Floersheim, Ph.D., P.E. www.wearablerobotics.com Help shape a global future leveraging technology in
IT and Systems Science Transformational Impact on Technology, Society, Work, Life, Education, Training
 IT and Systems Science Transformational Impact on Technology, Society, Work, Life, Education, Training John S. Baras Institute for Systems Research and Dept. of Electrical and Computer Engin. University
IT and Systems Science Transformational Impact on Technology, Society, Work, Life, Education, Training John S. Baras Institute for Systems Research and Dept. of Electrical and Computer Engin. University
Chapter 1: Introduction to Control Systems Objectives
 Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed
Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed
Accelerating innovations in science and technology (S&T) are having profound effects on global civilization These developments will have strategic
 are having profound effects on global civilization These developments will have strategic") World Future Society Meeting 24 July 2015 Dr. James Kadtke National Defense University and U.C. San Diego jkadtke@aol.com Accelerating innovations in science and technology (S&T) are having profound effects
World Future Society Meeting 24 July 2015 Dr. James Kadtke National Defense University and U.C. San Diego jkadtke@aol.com Accelerating innovations in science and technology (S&T) are having profound effects
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Responsible AI & National AI Strategies
 Responsible AI & National AI Strategies European Union Commission Dr. Anand S. Rao Global Artificial Intelligence Lead Today s discussion 01 02 Opportunities in Artificial Intelligence Risks of Artificial
Responsible AI & National AI Strategies European Union Commission Dr. Anand S. Rao Global Artificial Intelligence Lead Today s discussion 01 02 Opportunities in Artificial Intelligence Risks of Artificial
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1
 Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
Familiarization with the Servo Robot System
 Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
Artificial Intelligence and Robotics Getting More Human
 Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Faurecia : Smart Life on board An innovative company
 Faurecia : Smart Life on board An innovative company Anna Rossi December 6,th, 2017 Les interactions confort et santé dans l habitacle automobile Faurecia is a leading equipment manufacturer 35 countries
Faurecia : Smart Life on board An innovative company Anna Rossi December 6,th, 2017 Les interactions confort et santé dans l habitacle automobile Faurecia is a leading equipment manufacturer 35 countries
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Design and Analysis of Articulated Inspection Arm of Robot
 VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
Logic Programming. Dr. : Mohamed Mostafa
 Dr. : Mohamed Mostafa Logic Programming E-mail : Msayed@afmic.com Text Book: Learn Prolog Now! Author: Patrick Blackburn, Johan Bos, Kristina Striegnitz Publisher: College Publications, 2001. Useful references
Dr. : Mohamed Mostafa Logic Programming E-mail : Msayed@afmic.com Text Book: Learn Prolog Now! Author: Patrick Blackburn, Johan Bos, Kristina Striegnitz Publisher: College Publications, 2001. Useful references
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
ETICA E GOVERNANCE DELL INTELLIGENZA ARTIFICIALE
 Conferenza NEXA su Internet e Società, 18 Dicembre 2017 ETICA E GOVERNANCE DELL INTELLIGENZA ARTIFICIALE Etica e Smart Cities Le nuove frontiere dell Intelligenza Artificiale per la città del futuro Giuseppe
Conferenza NEXA su Internet e Società, 18 Dicembre 2017 ETICA E GOVERNANCE DELL INTELLIGENZA ARTIFICIALE Etica e Smart Cities Le nuove frontiere dell Intelligenza Artificiale per la città del futuro Giuseppe
JAWAHARLAL NEHRU TECHNOLOGICAL UNIVERSITY HYDERABAD
 30-11-2018 03-12-2018 05-12-2018 08-12-2018 13-12-2018 FRIDAY SATURDAY GROUND WATER DEVELOPMENT AND DISASTER AND MITIGATION ADVANCED STRUCTURAL ESTIMATING AND FINITE ELEMENT CIVIL DESIGN GIS AND REMOTE
30-11-2018 03-12-2018 05-12-2018 08-12-2018 13-12-2018 FRIDAY SATURDAY GROUND WATER DEVELOPMENT AND DISASTER AND MITIGATION ADVANCED STRUCTURAL ESTIMATING AND FINITE ELEMENT CIVIL DESIGN GIS AND REMOTE
GUIDELINES FOR DESIGN LOW COST MICROMECHANICS. L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul
 GUIDELINES FOR DESIGN LOW COST MICROMECHANICS L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul Center of Applied Sciences and Technological Development, UNAM Laboratory of Mechatronics and Micromechanics,
GUIDELINES FOR DESIGN LOW COST MICROMECHANICS L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul Center of Applied Sciences and Technological Development, UNAM Laboratory of Mechatronics and Micromechanics,
Jim Mangione June, 2017
 Jim Mangione 22-23 June, 2017 Placeholder for Cholesterol VR Video https://vimeo.com/208537130 PLAY VIDEO FROM: 00:35 01:42 2 This presentation outlines a general technology direction. Pfizer Inc. has
Jim Mangione 22-23 June, 2017 Placeholder for Cholesterol VR Video https://vimeo.com/208537130 PLAY VIDEO FROM: 00:35 01:42 2 This presentation outlines a general technology direction. Pfizer Inc. has
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Human and Machine Intelligence: Implications for the future of education
 Human and Machine Intelligence: Implications for the future of education Gallman & Weiss, 1969 Kendrick, 1961 BEA, 2010 Knowledge is a pattern of connections New knowledge builds on (relates to) what
Human and Machine Intelligence: Implications for the future of education Gallman & Weiss, 1969 Kendrick, 1961 BEA, 2010 Knowledge is a pattern of connections New knowledge builds on (relates to) what
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the