Cognitive Robotics 2017/2018
|
|
|
- Harold Lawson
- 5 years ago
- Views:
Transcription
1 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci Artificial Intelligence and Robotics Lab - Politecnico di Milano



2 About me and my lectures Lectures given by Matteo Matteucci Research Topics Robotics and Autonomous Systems Computer Vision and Perception Pattern Recognition & Machine Learning Benchmarking in Robotics Aims of these lectures: learning how to design and implement the software which makes autonomous an autonomous robot/system (e.g., symbolic planning, behavior based architectures, neural networks, human robot interaction, natural language processing, ) 2

3 Course objectives and disclaimer This course addresses the methodological aspects of Cognitive Robotics. Cognitive Robotics is about endowing robots and embodied agents with intelligent behavior by designing and deploying a processing architecture making them apt to deliberate, learn, and reason about how to behave in response to complex goals in a complex world. This is the 2 nd edition of this course, there will be lectures you ll like and lectures you won t, there ll be topics clearly explained other not, there will be teaching styles you ll enjoy while others will just bore you. Keep with us until the end and help us in improving the course so next edition will be marvelous and unforgettable! 3


 Seminars")

4 Course syllabus Cognitive Robotics introduction Cognition and the sense-plan-act architecture Deliberative, reactive, and hybrid approaches Deliberative systems for cognitive robots Symbolic planning and PDDL Bioinspired controllers for autonomous robots Behavior based architectures Neural networks and learning Human-Robot interaction Non verbal human robot interaction (Natural language processing) Seminars from the students How does a machine take intelligent decisions to interact with the world 30h lectures 20-30h lectures and seminars How does a machine interact with humans 4



5 It will sound less weird in a few weeks! 5
?")
6 What is going to happen in these few weeks??? Second course edition The program will be refined ongoing Lectures might look a little disconnected Little previous experience about exams not necessarily a negative thing ;-)??? Additional lecturers will help me: Andrea Bonarini (Non Verbal Human-Robot Interaction) Simone Mentasti (TBD) All the infos on the course website 6
7 Course organization / rules Classes (no distinction between lecture and exercise): Tuesday, 08:15 10:15, in V.S7-A Friday, 10:15 13:15, in V.S7-A These overlap with... Detailed calendar online (updated weekly) Grading policy: Topic proposed later in the semester, suggestions are welcome Written examination covering the whole program up to 27/32 Seminar on a course topic graded up to 5/32 Final score will be the sum of the two grades 32/32 Might be replaced by a coding project... Based on theoretical questions... 7
8 Questions?... 8
9 Cognitive Robotics Robotics Introduction Matteo Matteucci Artificial Intelligence and Robotics Lab - Politecnico di Milano
 11")
10 Rossum Universal Robots (1920) 11
 12")
11 Star Wars (1977) 12

12 Short Circuit (1986) 13
 14")
13 I Robot (2001) 14

14 Ex Machina (2015) 15

15 Sometimes reality is different... 16


16 ... and the winner is... 17

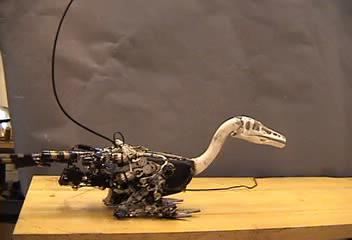
17 ... and check! Sometimes dreams come true (ATLAS 2016)... 18

18 ... and every year it gets better 19
19 Steps in robot history Mechanical era (1700): automata karakuri-ningyo 20



20 Automata: the robot ancestors Karakuri-ningyo Edo Period ( ) The Writer Pierre Jaquet-Droz ( ) The Turk Wolfgang von Kempelen ( ) 21
21 Steps in robot history Mechanical era (1700): automata karakuri-ningyo Fiction era ( 20s): Rossum Universal Robot Cybernetics era ( 40s): Turtle and telerobot Automation era (from the 60s): Industrial robots 22


22 First robots UNIMATE, the first industrial robot, began work at General Motors. Obeying step-bystep commands stored on a magnetic drum, the 4,000-pound arm sequenced and stacked hot pieces of die-cast metal Marvin Minsky developed the Tentacle Arm, which moved like an octopus. It had twelve joints designed to reach around obstacles. A PDP-6 computer controlled the arm, powered by hydraulic fluids. Mounted on a wall, it could lift the weight of a person. 23




23 What is a Robot? A reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks. (Robot Institute of America, 1980) An what about these??? We need a different defintion of robot! 24
: Rossum Universal Robot")
: Industrial robots Information era (from the 90s):")
24 Steps in robot history Mechanical era (1700): automata karakuri-ningyo Fiction era ( 20s): Rossum Universal Robot Cybernetics era ( 40s): Turtle and telerobot Automation era (from the 60s): Industrial robots Information era (from the 90s): Intelligence Autonomy Cooperation 25
 and")

25 Shakey (1972) and the Stanford Cart (1970) 26
26 ISO 8373: Robots and robotic devices A robot is an actuated mechanism programmable in two or more axes with a degree of autonomy, moving within its environment, to perform intended tasks. Autonomy in this context means the ability to perform intended tasks based on current state and sensing, without human intervention. A service robot is a robot that performs useful tasks for humans or equipment excluding industrial automation application. 27

27 Industrial vs Service Robotics 28
28 ISO 8373: Robots and robotic devices A robot is an actuated mechanism programmable in two or more axes with a degree of autonomy, moving within its environment, to perform intended tasks. Autonomy in this context means the ability to perform intended tasks based on current state and sensing, without human intervention. A service robot is a robot that performs useful tasks for humans or equipment excluding industrial automation application. A personal service robot or a service robot for personal use is a service robot used for a noncommercial task, usually by lay persons. E.g., domestic servant robot, automated wheelchair, personal mobility assist robot, and pet exercising robot. A professional service robot or a service robot for professional use is a service robot used for a commercial task, usually operated by a properly trained operator. E.g., cleaning robot for public places, delivery robot in offices or hospitals, fire-fighting robot, rehabilitation robot and surgery robot in hospitals. In this context an operator is a person designated to start, monitor and stop the intended operation of a robot or a robot system. 29

 http://www.")


29 The Bill Gates Prophecy 100 Market value (Billions of Euros) Service Robotics Space and security Industrial Robotics





30 Autonomous service robot 31
31 Some notes about the ISO definitions A robot system is a system comprising robot(s), end-effector(s) and any machinery, equipment, or sensors supporting the robot performing its task. According to the definition, "a degree of autonomy" is required for service robots ranging from partial autonomy (including human robot interaction) to full autonomy (without active human robot intervention). In this context human robot-interaction means information and action exchanges between human and robot to perform a task by means of a user interface. 32





32 Medical robots 33
33 Some notes about the ISO definitions A robot system is a system comprising robot(s), end-effector(s) and any machinery, equipment, or sensors supporting the robot performing its task. According to the definition, "a degree of autonomy" is required for service robots ranging from partial autonomy (including human robot interaction) to full autonomy (without active human robot intervention). In this context human robot-interaction means information and action exchanges between human and robot to perform a task by means of a user interface. Manipulating industrial robots (which can be either fixed in place or mobile) could also be regarded as service robots, provided they are installed in non-manufacturing operations. Service robots may or may not be equipped with an arm structure as is case with some industrial robots. Often, but not always, service robots are mobile. 34


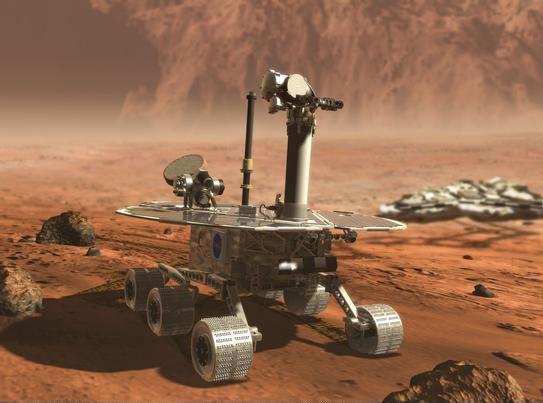
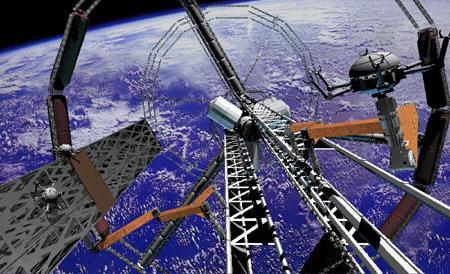
34 Space robots 35



35 Autonomous vehicles 36
36 The Race to Market 37
37 Some notes about the ISO definitions A robot system is a system comprising robot(s), end-effector(s) and any machinery, equipment, or sensors supporting the robot performing its task. According to the definition, "a degree of autonomy" is required for service robots ranging from partial autonomy (including human robot interaction) to full autonomy (without active human robot intervention). In this context human robot-interaction means information and action exchanges between human and robot to perform a task by means of a user interface. Manipulating industrial robots (which can be either fixed in place or mobile) could also be regarded as service robots, provided they are installed in non-manufacturing operations. Service robots may or may not be equipped with an arm structure as is case with some industrial robots. Often, but not always, service robots are mobile. In some cases, service robots consist of a mobile platform on which one or several arms are attached and controlled in the same mode as the arms of industrial robot. Furthermore, contrary to their industrial counterparts, service robots do not have to be fully automatic or autonomous. In many cases these machines may even assist a human user or be teleoperated. 38





38 Teleoperated and telepresence robots 39



39 What makes an autonomous robot? A machine gets information from a set of sensors and upon these accomplish its task autonomously by moving its body parts Plan Sense Act Note: The Sense-Plan-Act model is just one possible cognitive architecture for autonomous robots (Cognitive Robotics) 40
40 What does it make a mobile robot? Plan Algorithms Sense Sensors Actuators 41

41 Cognitive Robotics Cognitive Robotics Introduction Matteo Matteucci Artificial Intelligence and Robotics Lab - Politecnico di Milano



42 Two Kinds of Robots: From a D to a C! The Automaton Robot is characterized by the 3D of its tasks Dull Dirty Dangerous D as Dumb! The Autonomous Robot of our dreams is characterized by Cs Clever Charismatic Creative C as Cognitive! 43
43 What is Cognitive Robotics? The Cognitive Robotics group is concerned with endowing robotic or software agents with higher level cognitive functions that involve reasoning, for example, about goals, perception, actions, the mental states of other agents, collaborative task execution, etc. University of Toronto Cognitive Robotics group Cognitive robotics is a new approach to robot programming based on high level primitives for perception and action. These primitives draw inspiration from ideas in cognitive science CMU s Cognitive Robotics course website 44
44 What is Cognitive Robotics? Cognitive robotics (CR) is concerned with endowing robots with mammalian and human-like cognitive capabilities to enable the achievement of complex goals in complex environments. Cognitive robotics is focused on using animal cognition as a starting point for the development of robotic computational algorithms, as opposed to more traditional Artificial Intelligence techniques, which may or may not draw upon mammalian and human cognition as an inspiration for algorithm development. Wikipedia 45

45 Robotics + Cognitive Science = Cognitive Robotics Robotics + Cognitive Science Create robots with cognitive abilities Create robots that are human-like Cognitive Science Robotics Use cognitive science to improve robots Robotics Cognitive Science Use robots to test cognitive science theories Use robots to compare different cognitive architectures Use robots to identify problems and questions about cognition Use robots as a platform to learn about cognition 46
46 Improving robots capabilities with cognition Cognitive Robotics provides cognitive building blocks to robots: High-Level Perception and Action Attention Memory Learning Concept Formation Reasoning and Problem Solving Communication and Use of Language Theory of Mind Social Interaction... Cognitive Science Artificial Intelligence Robotics Robot Cognition 47
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Course Info. CS 486/686 Artificial Intelligence. Outline. Artificial Intelligence (AI)
") Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Chapter 31. Intelligent System Architectures
 Chapter 31. Intelligent System Architectures The Quest for Artificial Intelligence, Nilsson, N. J., 2009. Lecture Notes on Artificial Intelligence, Spring 2012 Summarized by Jang, Ha-Young and Lee, Chung-Yeon
Chapter 31. Intelligent System Architectures The Quest for Artificial Intelligence, Nilsson, N. J., 2009. Lecture Notes on Artificial Intelligence, Spring 2012 Summarized by Jang, Ha-Young and Lee, Chung-Yeon
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
CORC Exploring Robotics. Unit A: Introduction To Robotics
 CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
CS 486/686 Artificial Intelligence
 CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
Elements of Artificial Intelligence and Expert Systems
 Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1
 Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
COMP5121 Mobile Robots
 COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Robotics in Oil and Gas. Matt Ondler President / CEO
 Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
Appendices master s degree programme Artificial Intelligence
 Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Artificial Intelligence
 Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
History of Intelligent Robotics
 History of Intelligent Robotics August 29, 2002 Class Meeting 3 Announcement Remember Assignment #1 is due at beginning of class next time Objectives Understand historical precursors to intelligent robotics:
History of Intelligent Robotics August 29, 2002 Class Meeting 3 Announcement Remember Assignment #1 is due at beginning of class next time Objectives Understand historical precursors to intelligent robotics:
Artificial Intelligence and Robotics Getting More Human
 Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Robotics in Austria. 1 Introduction. 2 Robots
 ROBOTICS IN AUSTRIA 23 Robotics in Austria Peter Kopacek Intelligent Handling and Robotics IHRT Vienna University of Technology Favoritenstrasse 9; E325A6 1040 Wien Phone: +43 1 58801 31800 email: kopacek@ihrt.tuwien.ac.at
ROBOTICS IN AUSTRIA 23 Robotics in Austria Peter Kopacek Intelligent Handling and Robotics IHRT Vienna University of Technology Favoritenstrasse 9; E325A6 1040 Wien Phone: +43 1 58801 31800 email: kopacek@ihrt.tuwien.ac.at
Autonomous Robotic (Cyber) Weapons?
 Weapons?") Autonomous Robotic (Cyber) Weapons? Giovanni Sartor EUI - European University Institute of Florence CIRSFID - Faculty of law, University of Bologna Rome, November 24, 2013 G. Sartor (EUI-CIRSFID) Autonomous
Autonomous Robotic (Cyber) Weapons? Giovanni Sartor EUI - European University Institute of Florence CIRSFID - Faculty of law, University of Bologna Rome, November 24, 2013 G. Sartor (EUI-CIRSFID) Autonomous
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Challenges in emerging service robots
 MILITARY ISO TC299 Robotics SG1: Gaps and structure INDUSTRIAL ROBOTS PERSONAL CARE ROBOTS IEC TC62: Electrical equipment in medical practice SC 62A: Common aspects of electrical equipment used in medical
MILITARY ISO TC299 Robotics SG1: Gaps and structure INDUSTRIAL ROBOTS PERSONAL CARE ROBOTS IEC TC62: Electrical equipment in medical practice SC 62A: Common aspects of electrical equipment used in medical
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
BOOKMARK YOUR TALK AT STAR CONFERENCES MAY 30-31, 2019
 BOOKMARK YOUR TALK AT STAR CONFERENCES WORLD SUMMIT ON AUTOMATION, ARTIFICIAL INTELLIGENCE, ROBOTICS AND MECHATRONICS Invitation Dear Attendees, We are glad to announce the International Conference on
BOOKMARK YOUR TALK AT STAR CONFERENCES WORLD SUMMIT ON AUTOMATION, ARTIFICIAL INTELLIGENCE, ROBOTICS AND MECHATRONICS Invitation Dear Attendees, We are glad to announce the International Conference on
Artificial Intelligence
 Artificial Intelligence (Sistemas Inteligentes) Pedro Cabalar Depto. Computación Universidade da Coruña, SPAIN Chapter 1. Introduction Pedro Cabalar (UDC) ( Depto. AIComputación Universidade da Chapter
Artificial Intelligence (Sistemas Inteligentes) Pedro Cabalar Depto. Computación Universidade da Coruña, SPAIN Chapter 1. Introduction Pedro Cabalar (UDC) ( Depto. AIComputación Universidade da Chapter
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
ACHIEVING SEMI-AUTONOMOUS ROBOTIC BEHAVIORS USING THE SOAR COGNITIVE ARCHITECTURE
 2010 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 17-19 DEARBORN, MICHIGAN ACHIEVING SEMI-AUTONOMOUS ROBOTIC
2010 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) MINI-SYMPOSIUM AUGUST 17-19 DEARBORN, MICHIGAN ACHIEVING SEMI-AUTONOMOUS ROBOTIC
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
CSC 550: Introduction to Artificial Intelligence. Fall 2004
 CSC 550: Introduction to Artificial Intelligence Fall 2004 See online syllabus at: http://www.creighton.edu/~davereed/csc550 Course goals: survey the field of Artificial Intelligence, including major areas
CSC 550: Introduction to Artificial Intelligence Fall 2004 See online syllabus at: http://www.creighton.edu/~davereed/csc550 Course goals: survey the field of Artificial Intelligence, including major areas
Welcome to EGN-1935: Electrical & Computer Engineering (Ad)Ventures
Ventures") : ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
: ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
ISO INTERNATIONAL STANDARD. Robots for industrial environments Safety requirements Part 1: Robot
 INTERNATIONAL STANDARD ISO 10218-1 First edition 2006-06-01 Robots for industrial environments Safety requirements Part 1: Robot Robots pour environnements industriels Exigences de sécurité Partie 1: Robot
INTERNATIONAL STANDARD ISO 10218-1 First edition 2006-06-01 Robots for industrial environments Safety requirements Part 1: Robot Robots pour environnements industriels Exigences de sécurité Partie 1: Robot
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
E Technology: A. Innovations Activity: Introduction to Robotics
 Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
CMSC 372 Artificial Intelligence. Fall Administrivia
 CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF