Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
|
|
|
- Norah Wilkins
- 6 years ago
- Views:
Transcription
1 Intelligent Agents
2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
3 Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Human agent: eyes, ears, and other organs for sensors; hands, legs, mouth, and other body parts for actuators Robotic agent: cameras and infrared range finders for sensors; various motors for actuators
4 Agents and environments The agent function maps from percept histories to actions: [f: P* A] The agent program runs on the physical architecture to produce f
5 Vacuum-cleaner world Percepts: location and contents, e.g., [A,Dirty] Actions: Left, Right, Suck, NoOp
6 Rational agents An agent should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the agent to be most successful Performance measure: An objective criterion for success of an agent's behavior E.g., performance measure of a vacuum-cleaner agent could be amount of dirt cleaned up, amount of time taken, amount of electricity consumed, amount of noise generated, etc.
7 Rational agents Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has.
8 Rational agents Rationality is distinct from omniscience (all-knowing with infinite knowledge) Agents can perform actions in order to modify future percepts so as to obtain useful information (information gathering, exploration) An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt)
9 PEAS PEAS: Performance measure, Environment, Actuators, Sensors Must first specify the setting for intelligent agent design Consider, e.g., the task of designing an automated taxi driver: Performance measure Environment Actuators Sensors
10 PEAS Must first specify the setting for intelligent agent design Consider, e.g., the task of designing an automated taxi driver: Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn
11 PEAS Agent: Medical diagnosis system Performance measure: Healthy patient, minimize costs, lawsuits Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers)
12 PEAS Agent: Part-picking robot Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors
13 PEAS Agent: Interactive English tutor Performance measure: Maximize student's score on test Environment: Set of students Actuators: Screen display (exercises, suggestions, corrections) Sensors: Keyboard
14 Environment types Fully observable (vs. partially observable): An agent's sensors give it access to the complete state of the environment at each point in time. Deterministic (vs. stochastic): The next state of the environment is completely determined by the current state and the action executed by the agent. (If the environment is deterministic except for the actions of other agents, then the environment is strategic) Episodic (vs. sequential): The agent's experience is divided into atomic "episodes" (each episode consists of the agent perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself.
15 Environment types Static (vs. dynamic): The environment is unchanged while an agent is deliberating. (The environment is semidynamic if the environment itself does not change with the passage of time but the agent's performance score does) Discrete (vs. continuous): A limited number of distinct, clearly defined percepts and actions. Single agent (vs. multiagent): An agent operating by itself in an environment.
16 Environment types Chess with Chess without Taxi driving a clock a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single agent No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
17 Properties of a Chess agent. Property Fully Observable Static Determistic Episodic Multi-Agent Description The Chess board is fully observable to the Chess agent, nothing is hidden. The environment changes based on actions of the Chess agent and those of the opponent. But during the period when the Chess agent is making a decision for a move, the environment (Chess board) does not change. The Chess board changes based on the move selected by the agent, and therefore the environment is deterministic. The Chess agent operates in episodes, alternating between agent moves and opponent moves. The Chess board environment can be classified as single agent (if the opponent is not considered) or as multi-agent, considering that an opponent operates on the environment in a competitive fashion
18 Properties of a non-player character agent. Property Partial Observability Dynamic Stochastic Continuous Multi-Agent Description Another character in the game may not be visible to the player, Players and NPCs compete or cooperate in the environment i n real-time, An action taken by an agent at one time may not result in the same response when taken again (such as shooting at another player). The FPS environment is continuous, as compared to an episodic environment such as a turn-based strategy game. Typically, these are competitive environments, though some also include cooperative elements through support NPC agents.
19 AGENT TAXONOMIES Interface Agents To minimize information overload on a user, and reduce the amount of information presented to a user as a way to help the user focus on what is most important at any given time A user scenario for and UseNet. Virtual Character Agents A useful agent application that takes on a number of forms An intelligent interface agent to minimize distractions.
20 AGENT TAXONOMIES Entertainment Agents used as characters in computer-generated (CG) movies or for training purposes in military simulations. Game Agents Non-Player Characters in games (NPCs), bring life to a variety of games by introducing characters that are autonomous and add to the realism of video games. ChatterBots, or conversational agents Mobile Agents the agents have the ability to migrate from one host computer to another. User Assistance Agent for the purpose of simplifying our experiences when dealing with computers Examples: filtering, Information Gathering and Filtering and other user assistance application Hybrid Agents Instead of a single characteristic, such as mobile, agents implement multiple characteristics, such as mobile and communicative.
21 Agent functions and programs An agent is completely specified by the agent function mapping percept sequences to actions One agent function (or a small equivalence class) is rational Aim: find a way to implement the rational agent function concisely
22 Table-lookup agent \input{algorithms/table-agent-algorithm} Drawbacks: Huge table Take a long time to build the table No autonomy Even with learning, need a long time to learn the table entries
23 Agent program for a vacuumcleaner agent \input{algorithms/reflex-vacuum-agentalgorithm}
24 Agent properties. Property Rationale Autonomous Persistent Communicative Cooperative Mobile Adaptive Description Able to act in a rational (or intelligent) way (does the right thing at the right time, given a known outcome.) Able to act independently, not subject to external control Able to run continuously Able to provide information, or command other agents Able to work with other agents to achieve goals Able to move (typically related to network mobility) Able to learn and adapt
25
26 Agent types Four basic types in order of increasing generality: Simple reflex agents Model-based reflex agents Goal-based agents Utility-based agents

27 Simple reflex agents
28 Simple reflex agents \input{algorithms/d-agent-algorithm}
29 Model-based reflex agents
30 Model-based reflex agents \input{algorithms/d+-agent-algorithm}
31 Goal-based agents
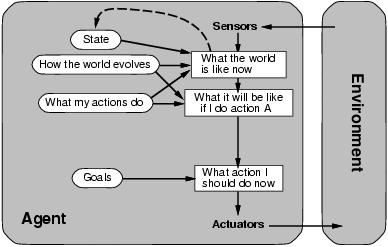
32 Utility-based agents

33 Learning agents





34 AGENT ARCHITECTURES Reactive/ Reflex Architectures agent behaviors are simply a mapping between stimulus and response. The agent has no decision-making skills, only reactions to the environment in which it exists An example is Subsumption agent Behavior networks, created by Pattie Maes in the late 1980s, is another reactive architecture that is distributed in nature Deliberative Architectures one that includes some deliberation over the action to perform given the current set of inputs Example is ATLANTIS Behaviour network for a simple game agent
 Architecture follows the theory of human reasoning as defined by Michael Bratman.")
.")
35 AGENT ARCHITECTURES Blackboard Architectures operates around a global work area call the blackboard (a common work area for a number of agents that work cooperatively to solve a given problem Belief-Desire-Intention (BDI) Architecture follows the theory of human reasoning as defined by Michael Bratman. Belief represents the view of the world by the agent (what it believes to be the state of the environment in which it exists). Desires are the goals that define the motivation of the agent (what it wants to achieve). Intentions specify that the agent uses the Beliefs and Desires in order to choose one or more actions in order to meet the desires. The blackboard architecture supports multi-agent problem solving.

36 AGENT ARCHITECTURES Hybrid Architectures Based on the needs of the agent system, different architectural elements can be chosen to meet those needs Mobile Architectures introduces the ability for agents to migrate themselves between hosts
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents p.1/25. Intelligent Agents. Chapter 2
 Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
CMSC 372 Artificial Intelligence What is AI? Thinking Like Acting Like Humans Humans Thought Processes Behaviors
 CMSC 372 Artificial Intelligence Fall 2017 What is AI? Machines with minds Decision making and problem solving Machines with actions Robots Thinking Like Humans Acting Like Humans Cognitive modeling/science
CMSC 372 Artificial Intelligence Fall 2017 What is AI? Machines with minds Decision making and problem solving Machines with actions Robots Thinking Like Humans Acting Like Humans Cognitive modeling/science
HIT3002: Introduction to Artificial Intelligence
 HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS. Santiago Ontañón
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
Administrivia. CS 188: Artificial Intelligence Spring Agents and Environments. Today. Vacuum-Cleaner World. A Reflex Vacuum-Cleaner
 CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
CS 380: ARTIFICIAL INTELLIGENCE
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Structure of Intelligent Agents. Examples of Agents 1. Examples of Agents 2. Intelligent Agents and their Environments. An agent:
 Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Inf2D 01: Intelligent Agents and their Environments
 Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Artificial Intelligence
 Artificial Intelligence Chapter 1 Chapter 1 1 Outline What is AI? A brief history The state of the art Chapter 1 2 What is AI? Systems that think like humans Systems that think rationally Systems that
Artificial Intelligence Chapter 1 Chapter 1 1 Outline What is AI? A brief history The state of the art Chapter 1 2 What is AI? Systems that think like humans Systems that think rationally Systems that
COMP9414/ 9814/ 3411: Artificial Intelligence. Week 2. Classifying AI Tasks
 COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Introduction to Multiagent Systems
 Introduction to Multiagent Systems Michal Jakob Agent Technology Center, Dept. of Cybernetics, FEE Czech Technical University A4M33MAS Autumn 2010 - Lect. 1 Michal Jakob (Agent Technology Center, Dept.
Introduction to Multiagent Systems Michal Jakob Agent Technology Center, Dept. of Cybernetics, FEE Czech Technical University A4M33MAS Autumn 2010 - Lect. 1 Michal Jakob (Agent Technology Center, Dept.
Introduction to Multi-Agent Systems. Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn Lect. 1
 Introduction to Multi-Agent Systems Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn 2016 - Lect. 1 General Information Lecturers: Prof. Michal Pěchouček and Dr. Branislav Bošanský Tutorials: Branislav
Introduction to Multi-Agent Systems Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn 2016 - Lect. 1 General Information Lecturers: Prof. Michal Pěchouček and Dr. Branislav Bošanský Tutorials: Branislav
COMP9414/ 9814/ 3411: Artificial Intelligence. 2. Environment Types. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
Outline. Introduction to AI. Artificial Intelligence. What is an AI? What is an AI? Agents Environments
 Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Our 2-course meal for this evening
 1 CSEP 573 Applications of Artificial Intelligence (AI) Rajesh Rao (Instructor) Abe Friesen (TA) http://www.cs.washington.edu/csep573 UW CSE AI faculty Our 2-course meal for this evening Part I Goals Logistics
1 CSEP 573 Applications of Artificial Intelligence (AI) Rajesh Rao (Instructor) Abe Friesen (TA) http://www.cs.washington.edu/csep573 UW CSE AI faculty Our 2-course meal for this evening Part I Goals Logistics
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Informatics 2D: Tutorial 1 (Solutions)
") Informatics 2D: Tutorial 1 (Solutions) Agents, Environment, Search Week 2 1 Agents and Environments Consider the following agents: A robot vacuum cleaner which follows a pre-set route around a house and
Informatics 2D: Tutorial 1 (Solutions) Agents, Environment, Search Week 2 1 Agents and Environments Consider the following agents: A robot vacuum cleaner which follows a pre-set route around a house and
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2017 http://www.ics.uci.edu/~kkask/fall-2017 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2017 http://www.ics.uci.edu/~kkask/fall-2017 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
CPS331 Lecture: Intelligent Agents last revised July 25, 2018
 CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
2. Environment Types. COMP9414/ 9814/ 3411: Artificial Intelligence. Agent Model. Agents as functions. The PEAS model of an Agent
 COM9414/9814/3411 15s1 Environments 1 COM9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types gent Model sensors environment percepts actions? agent actuators COM9414/9814/3411 15s1 Environments
COM9414/9814/3411 15s1 Environments 1 COM9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types gent Model sensors environment percepts actions? agent actuators COM9414/9814/3411 15s1 Environments
Course Info. CS 486/686 Artificial Intelligence. Outline. Artificial Intelligence (AI)
") Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
CS 486/686 Artificial Intelligence
 CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Artificial Intelligence (Introduction to)
") Artificial Intelligence (Introduction to) 2003-2004 Instructor Dr Sergio Tessaris Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 315 652 room 229
Artificial Intelligence (Introduction to) 2003-2004 Instructor Dr Sergio Tessaris Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 315 652 room 229
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Cognitive Robotics. Behavior Control. Hans-Dieter Burkhard June 2014
 Cognitive Robotics Behavior Control Hans-Dieter Burkhard June 2014 Introduction Control Architectures Aspects of Rationality BDI Architectures Behavior Based Robotics Overview Burkhard Cognitive Robotics
Cognitive Robotics Behavior Control Hans-Dieter Burkhard June 2014 Introduction Control Architectures Aspects of Rationality BDI Architectures Behavior Based Robotics Overview Burkhard Cognitive Robotics
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Instructor. Artificial Intelligence (Introduction to) What is AI? Introduction. Dr Sergio Tessaris
 What is AI? Introduction. Dr Sergio Tessaris") Instructor Dr Sergio Tessaris Artificial Intelligence (Introduction to) Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 016 125 room 229 (2nd floor,
Instructor Dr Sergio Tessaris Artificial Intelligence (Introduction to) Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 016 125 room 229 (2nd floor,
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Agent-Based Systems. Agent-Based Systems. Agent-Based Systems. Five pervasive trends in computing history. Agent-Based Systems. Agent-Based Systems
 Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Artificial Intelligence
 Artificial Intelligence CS482, CS682, MW 1 2:15, SEM 201, MS 227 Prerequisites: 302, 365 Instructor: Sushil Louis, sushil@cse.unr.edu, http://www.cse.unr.edu/~sushil Games and game trees Multi-agent systems
Artificial Intelligence CS482, CS682, MW 1 2:15, SEM 201, MS 227 Prerequisites: 302, 365 Instructor: Sushil Louis, sushil@cse.unr.edu, http://www.cse.unr.edu/~sushil Games and game trees Multi-agent systems
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
CITS3001. Algorithms, Agents and Artificial Intelligence. Semester 1, 2015
 CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
3.1 Agents. Foundations of Artificial Intelligence. 3.1 Agents. 3.2 Rationality. 3.3 Summary. Introduction: Overview. 3. Introduction: Rational Agents
 Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Logical Agents (AIMA - Chapter 7)
") Logical Agents (AIMA - Chapter 7) CIS 391 - Intro to AI 1 Outline 1. Wumpus world 2. Logic-based agents 3. Propositional logic Syntax, semantics, inference, validity, equivalence and satifiability Next
Logical Agents (AIMA - Chapter 7) CIS 391 - Intro to AI 1 Outline 1. Wumpus world 2. Logic-based agents 3. Propositional logic Syntax, semantics, inference, validity, equivalence and satifiability Next
11/18/2015. Outline. Logical Agents. The Wumpus World. 1. Automating Hunt the Wumpus : A different kind of problem
 Outline Logical Agents (AIMA - Chapter 7) 1. Wumpus world 2. Logic-based agents 3. Propositional logic Syntax, semantics, inference, validity, equivalence and satifiability Next Time: Automated Propositional
Outline Logical Agents (AIMA - Chapter 7) 1. Wumpus world 2. Logic-based agents 3. Propositional logic Syntax, semantics, inference, validity, equivalence and satifiability Next Time: Automated Propositional
Autonomous Robotic (Cyber) Weapons?
 Weapons?") Autonomous Robotic (Cyber) Weapons? Giovanni Sartor EUI - European University Institute of Florence CIRSFID - Faculty of law, University of Bologna Rome, November 24, 2013 G. Sartor (EUI-CIRSFID) Autonomous
Autonomous Robotic (Cyber) Weapons? Giovanni Sartor EUI - European University Institute of Florence CIRSFID - Faculty of law, University of Bologna Rome, November 24, 2013 G. Sartor (EUI-CIRSFID) Autonomous
Integrating Learning in a Multi-Scale Agent
 Integrating Learning in a Multi-Scale Agent Ben Weber Dissertation Defense May 18, 2012 Introduction AI has a long history of using games to advance the state of the field [Shannon 1950] Real-Time Strategy
Integrating Learning in a Multi-Scale Agent Ben Weber Dissertation Defense May 18, 2012 Introduction AI has a long history of using games to advance the state of the field [Shannon 1950] Real-Time Strategy
Outline. Game Playing. Game Problems. Game Problems. Types of games Playing a perfect game. Playing an imperfect game
 Outline Game Playing ECE457 Applied Artificial Intelligence Fall 2007 Lecture #5 Types of games Playing a perfect game Minimax search Alpha-beta pruning Playing an imperfect game Real-time Imperfect information
Outline Game Playing ECE457 Applied Artificial Intelligence Fall 2007 Lecture #5 Types of games Playing a perfect game Minimax search Alpha-beta pruning Playing an imperfect game Real-time Imperfect information
CS343 Artificial Intelligence
 CS343 Artificial Intelligence Prof: Department of Computer Science The University of Texas at Austin Good Morning, Colleagues Good Morning, Colleagues Are there any questions? Logistics Questions about
CS343 Artificial Intelligence Prof: Department of Computer Science The University of Texas at Austin Good Morning, Colleagues Good Morning, Colleagues Are there any questions? Logistics Questions about
Autonomous Agents and MultiAgent Systems* Lecture 2
 * These slides are based on the book byinspitinpired Prof. M. Woodridge An Introduction to Multiagent Systems and the online slides compiled by Professor Jeffrey S. Rosenschein. Modifications introduced
* These slides are based on the book byinspitinpired Prof. M. Woodridge An Introduction to Multiagent Systems and the online slides compiled by Professor Jeffrey S. Rosenschein. Modifications introduced
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
LECTURE 26: GAME THEORY 1
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 26: GAME THEORY 1 INSTRUCTOR: GIANNI A. DI CARO ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 26: GAME THEORY 1 INSTRUCTOR: GIANNI A. DI CARO ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation
Game Artificial Intelligence ( CS 4731/7632 )
") Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
CMU-Q Lecture 20:
 CMU-Q 15-381 Lecture 20: Game Theory I Teacher: Gianni A. Di Caro ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation in (rational) multi-agent
CMU-Q 15-381 Lecture 20: Game Theory I Teacher: Gianni A. Di Caro ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation in (rational) multi-agent
MACHINE EXECUTION OF HUMAN INTENTIONS. Mark Waser Digital Wisdom Institute
 MACHINE EXECUTION OF HUMAN INTENTIONS Mark Waser Digital Wisdom Institute MWaser@DigitalWisdomInstitute.org TEAMWORK To be truly useful, robotic systems must be designed with their human users in mind;
MACHINE EXECUTION OF HUMAN INTENTIONS Mark Waser Digital Wisdom Institute MWaser@DigitalWisdomInstitute.org TEAMWORK To be truly useful, robotic systems must be designed with their human users in mind;
Interacting Agent Based Systems
 Interacting Agent Based Systems Dean Petters 1. What is an agent? 2. Architectures for agents 3. Emailing agents 4. Computer games 5. Robotics 6. Sociological simulations 7. Psychological simulations What
Interacting Agent Based Systems Dean Petters 1. What is an agent? 2. Architectures for agents 3. Emailing agents 4. Computer games 5. Robotics 6. Sociological simulations 7. Psychological simulations What
COMP310 Multi-Agent Systems Chapter 3 - Deductive Reasoning Agents. Dr Terry R. Payne Department of Computer Science
 COMP310 Multi-Agent Systems Chapter 3 - Deductive Reasoning Agents Dr Terry R. Payne Department of Computer Science Agent Architectures Pattie Maes (1991) Leslie Kaebling (1991)... [A] particular methodology
COMP310 Multi-Agent Systems Chapter 3 - Deductive Reasoning Agents Dr Terry R. Payne Department of Computer Science Agent Architectures Pattie Maes (1991) Leslie Kaebling (1991)... [A] particular methodology
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Game-playing AIs: Games and Adversarial Search I AIMA
 Game-playing AIs: Games and Adversarial Search I AIMA 5.1-5.2 Games: Outline of Unit Part I: Games as Search Motivation Game-playing AI successes Game Trees Evaluation Functions Part II: Adversarial Search
Game-playing AIs: Games and Adversarial Search I AIMA 5.1-5.2 Games: Outline of Unit Part I: Games as Search Motivation Game-playing AI successes Game Trees Evaluation Functions Part II: Adversarial Search
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
CMPT 310 Assignment 1
 CMPT 310 Assignment 1 October 16, 2017 100 points total, worth 10% of the course grade. Turn in on CourSys. Submit a compressed directory (.zip or.tar.gz) with your solutions. Code should be submitted
CMPT 310 Assignment 1 October 16, 2017 100 points total, worth 10% of the course grade. Turn in on CourSys. Submit a compressed directory (.zip or.tar.gz) with your solutions. Code should be submitted
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
CS510 \ Lecture Ariel Stolerman
 CS510 \ Lecture04 2012-10-15 1 Ariel Stolerman Administration Assignment 2: just a programming assignment. Midterm: posted by next week (5), will cover: o Lectures o Readings A midterm review sheet will
CS510 \ Lecture04 2012-10-15 1 Ariel Stolerman Administration Assignment 2: just a programming assignment. Midterm: posted by next week (5), will cover: o Lectures o Readings A midterm review sheet will
STRATEGO EXPERT SYSTEM SHELL
 STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Set 4: Game-Playing. ICS 271 Fall 2017 Kalev Kask
 Set 4: Game-Playing ICS 271 Fall 2017 Kalev Kask Overview Computer programs that play 2-player games game-playing as search with the complication of an opponent General principles of game-playing and search
Set 4: Game-Playing ICS 271 Fall 2017 Kalev Kask Overview Computer programs that play 2-player games game-playing as search with the complication of an opponent General principles of game-playing and search
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Artificial Intelligence for Games
 Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Who am I? AI in Computer Games. Goals. AI in Computer Games. History Game A(I?)
") Who am I? AI in Computer Games why, where and how Lecturer at Uppsala University, Dept. of information technology AI, machine learning and natural computation Gamer since 1980 Olle Gällmo AI in Computer
Who am I? AI in Computer Games why, where and how Lecturer at Uppsala University, Dept. of information technology AI, machine learning and natural computation Gamer since 1980 Olle Gällmo AI in Computer
Cyber-Physical Systems: Challenges for Systems Engineering
 Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Adversarial Search and Game Theory. CS 510 Lecture 5 October 26, 2017
 Adversarial Search and Game Theory CS 510 Lecture 5 October 26, 2017 Reminders Proposals due today Midterm next week past midterms online Midterm online BBLearn Available Thurs-Sun, ~2 hours Overview Game
Adversarial Search and Game Theory CS 510 Lecture 5 October 26, 2017 Reminders Proposals due today Midterm next week past midterms online Midterm online BBLearn Available Thurs-Sun, ~2 hours Overview Game
Introduction: What are the agents?
 Introduction: What are the agents? Roope Raisamo (rr@cs.uta.fi) Department of Computer Sciences University of Tampere http://www.cs.uta.fi/sat/ Definitions of agents The concept of agent has been used
Introduction: What are the agents? Roope Raisamo (rr@cs.uta.fi) Department of Computer Sciences University of Tampere http://www.cs.uta.fi/sat/ Definitions of agents The concept of agent has been used
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
Discussion of Emergent Strategy
 Discussion of Emergent Strategy When Ants Play Chess Mark Jenne and David Pick Presentation Overview Introduction to strategy Previous work on emergent strategies Pengi N-puzzle Sociogenesis in MANTA colonies
Discussion of Emergent Strategy When Ants Play Chess Mark Jenne and David Pick Presentation Overview Introduction to strategy Previous work on emergent strategies Pengi N-puzzle Sociogenesis in MANTA colonies
Chapter 31. Intelligent System Architectures
 Chapter 31. Intelligent System Architectures The Quest for Artificial Intelligence, Nilsson, N. J., 2009. Lecture Notes on Artificial Intelligence, Spring 2012 Summarized by Jang, Ha-Young and Lee, Chung-Yeon
Chapter 31. Intelligent System Architectures The Quest for Artificial Intelligence, Nilsson, N. J., 2009. Lecture Notes on Artificial Intelligence, Spring 2012 Summarized by Jang, Ha-Young and Lee, Chung-Yeon
CS 188 Introduction to Fall 2014 Artificial Intelligence Midterm
 CS 88 Introduction to Fall Artificial Intelligence Midterm INSTRUCTIONS You have 8 minutes. The exam is closed book, closed notes except a one-page crib sheet. Please use non-programmable calculators only.
CS 88 Introduction to Fall Artificial Intelligence Midterm INSTRUCTIONS You have 8 minutes. The exam is closed book, closed notes except a one-page crib sheet. Please use non-programmable calculators only.
AI in Computer Games. AI in Computer Games. Goals. Game A(I?) History Game categories
 History Game categories") AI in Computer Games why, where and how AI in Computer Games Goals Game categories History Common issues and methods Issues in various game categories Goals Games are entertainment! Important that things
AI in Computer Games why, where and how AI in Computer Games Goals Game categories History Common issues and methods Issues in various game categories Goals Games are entertainment! Important that things
Multi-Robot Cooperative System For Object Detection
 Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Algorithms and Networking for Computer Games
 Algorithms and Networking for Computer Games Chapter 1: Introduction http://www.wiley.com/go/smed Definition for play [Play] is an activity which proceeds within certain limits of time and space, in a
Algorithms and Networking for Computer Games Chapter 1: Introduction http://www.wiley.com/go/smed Definition for play [Play] is an activity which proceeds within certain limits of time and space, in a
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 2 February, 2018
 DIT411/TIN175, Artificial Intelligence Chapters 4 5: Non-classical and adversarial search CHAPTERS 4 5: NON-CLASSICAL AND ADVERSARIAL SEARCH DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 2 February,
DIT411/TIN175, Artificial Intelligence Chapters 4 5: Non-classical and adversarial search CHAPTERS 4 5: NON-CLASSICAL AND ADVERSARIAL SEARCH DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 2 February,
ARTIFICIAL INTELLIGENCE (CS 370D)
") Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) (CHAPTER-5) ADVERSARIAL SEARCH ADVERSARIAL SEARCH Optimal decisions Min algorithm α-β pruning Imperfect,
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) (CHAPTER-5) ADVERSARIAL SEARCH ADVERSARIAL SEARCH Optimal decisions Min algorithm α-β pruning Imperfect,
Workshops Elisava Introduction to programming and electronics (Scratch & Arduino)
") Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
How to build an autonomous anything
 How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides