Behaviour-Based Control. IAR Lecture 5 Barbara Webb
|
|
|
- Cory Foster
- 5 years ago
- Views:
Transcription
1 Behaviour-Based Control IAR Lecture 5 Barbara Webb
2 Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor control
3 Alternative is a horizontal (parallel) task decomposition Reason about objects Plan changes to world Identify objects Monitor changes Build maps Sensors Explore Wander Avoid objects Actuators
4 Some advantages of the horizontal approach: Don t have to build all parts before testing on robot Immediate appreciation of effects of embodiment and situatedness, possibility of reactive solutions Multiple goals pursued in parallel, late decision Multiple sensors without requiring fusion Each layer adds competence to already working robot graceful degradation if higher level fails Can map onto hardware e.g. new processors for each new level of behaviour - additivity
5 The behaviour-based approach Robot architecture is designed around a collection of behaviours: Typically, these are reactive, or use only local memory and minimalist representations Exploit physics and environmental interaction Each behaviour should function on its own as a complete sensorimotor loop in the real world (i.e. modular, but always building a complete agent)
")
6 E.g. subsumption architecture proposed by Brooks (1986) Decompose problem into layers of competence Each layer uses sensors, actuators and control Build and debug lowest layers first Add new layers without changing lower ones New layers will subsume the output of lower layers E.g. Polly (Horswill, 1993)
7 Subsumption on Polly : layer 0: avoid hazards Bump reflex: direct mapping from bump switches to motor controller to reverse and turn Allows sufficiently rapid response Actually disconnects main processor

8 Subsumption on Polly : layer 1: low level navigation Exploit physics of environment Texture filter to find free space/obstacles vp x Line detection to find corridor vanishing point vp x

9 Subsumption on Polly : layer 2: high level navigation Reactive place recognition: 32 place frames Corridor following, so can reduce map to simple grid Navigator makes turn request at junctions
10 Virtual sensor Camera image Subsumption on Polly : layer 3: person recognition Vertical symmetry Protusion Potential person: issue request Hello, I am Polly. Would you like a tour? If so, wave your foot around. Motion Person Low level navigation depth map
11 Subsumption on Polly : layer 4: tour sequence
12 Some problems of the horizontal approach: Hard to predict/verify the emergent outcome of the combined behaviours Have to decide how behaviours will interact: Hierarchical inhibition (e.g. subsumption architecture) Mixed outputs (e.g. motor schema architecture) Action selection mechanism: through bottom up emergent process through top-down control (see hybrid control lecture)
13 Motor schema architecture proposed by Arkin (1989) Schemas: independent asynchronous processes taking sensor inputs and generating velocity vectors Move-to-goal: Avoid-static-obstacle: Noise: Motor fusion: A weighted sum of the vectors determines the current reaction of the robot
14 Motor schema architecture Similar to potential field method, but only ever calculate the local vectors Relative gain of each behaviour can be varied according to robot s current mission state E.g. high gain noise for exploring, low gain noise when approaching goal (keeping some noise as behavioural grease to avoid local minima)
15 Action selection architectures A fixed hierarchy (as in subsumption) has to be predetermined and is not flexible to opportunities Motor fusion does not always produce the appropriate responses (particularly if behaviours conflict) Alternative is to have some form of action selection mechanism between behaviours, e.g.: Winner take all network Fuzzy logic Multiple objective optimisation Reinforcement learning or other adaptive methods More recent/complex systems may use several selection mechanisms, according to task and situation
16 DAMN (Distributed architecture for mobile navigation) proposed by Rosenblatt (1995) As before have set of parallel asynchronous behaviours producing possible action outputs Final output determined by arbiters that count the weighted votes for each action

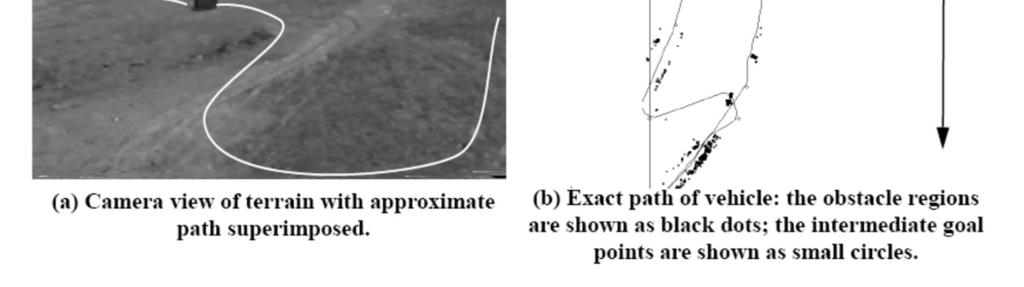
17 DAMN used on NAVLAB

18 Behaviour based approach: Conclusions Produced some very robust and successful robots: Still very widely used in robot and agent approaches But no continuous evolution to higher capabilities? Wide influence across AI and related fields: Importance of embodiment and situatedness; solving problems with physics and hardware as well as software Possibilities for low-level sensorimotor coupling, exploiting environments, emergent behaviours Use of world rather than internal representations New focus on action selection as critical problem to solve
19 Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options? Build up toolbox of techniques Use learning or evolutionary methods Copy existing systems (i.e. biology) Formalise interactions as dynamical systems Difficult to do some traditional (and useful) tasks. Increasingly common to adopt hybrid approach, e.g. classical planner operating on top of basic behaviours
20 References Brooks, R. A., "Elephants Don't Play Chess", Robotics and Autonomous Systems (6), 1990, pp Brooks, R. A. "A Robust Layered Control System for a Mobile Robot", IEEE Journal of Robotics and Automation, Vol. 2, No. 1, March 1986, pp ; also MIT AI Memo 864, September Available from Horswill, I. (1993) Polly: A Vision-Based Artificial Agent Proceedings of the 11th National Conference on Artificial Intelligence (AAAI-93) Arkin, R.C. (1989) Motor schema based mobile robot navigation. International Journal of Robotics Research, 8: Rosenblatt, J.K. (1997) DAMN: a distributed architecture for mobile navigation. Journal of Experimental and Theoretical Artificial Intelligence, 9:
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Robot Architectures. Prof. Yanco , Fall 2011
 Robot Architectures Prof. Holly Yanco 91.451 Fall 2011 Architectures, Slide 1 Three Types of Robot Architectures From Murphy 2000 Architectures, Slide 2 Hierarchical Organization is Horizontal From Murphy
Robot Architectures Prof. Holly Yanco 91.451 Fall 2011 Architectures, Slide 1 Three Types of Robot Architectures From Murphy 2000 Architectures, Slide 2 Hierarchical Organization is Horizontal From Murphy
Robot Architectures. Prof. Holly Yanco Spring 2014
 Robot Architectures Prof. Holly Yanco 91.450 Spring 2014 Three Types of Robot Architectures From Murphy 2000 Hierarchical Organization is Horizontal From Murphy 2000 Horizontal Behaviors: Accomplish Steps
Robot Architectures Prof. Holly Yanco 91.450 Spring 2014 Three Types of Robot Architectures From Murphy 2000 Hierarchical Organization is Horizontal From Murphy 2000 Horizontal Behaviors: Accomplish Steps
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Control Arbitration. Oct 12, 2005 RSS II Una-May O Reilly
 Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9
 Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Embodiment from Engineer s Point of View
 New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment
 Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment Fatma Boufera 1, Fatima Debbat 2 1,2 Mustapha Stambouli University, Math and Computer Science Department Faculty
Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment Fatma Boufera 1, Fatima Debbat 2 1,2 Mustapha Stambouli University, Math and Computer Science Department Faculty
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Fuzzy-Heuristic Robot Navigation in a Simulated Environment
 Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
APPLICATION OF FUZZY BEHAVIOR COORDINATION AND Q LEARNING IN ROBOT NAVIGATION
 APPLICATION OF FUZZY BEHAVIOR COORDINATION AND Q LEARNING IN ROBOT NAVIGATION Handy Wicaksono 1, Prihastono 2, Khairul Anam 3, Rusdhianto Effendi 4, Indra Adji Sulistijono 5, Son Kuswadi 6, Achmad Jazidie
APPLICATION OF FUZZY BEHAVIOR COORDINATION AND Q LEARNING IN ROBOT NAVIGATION Handy Wicaksono 1, Prihastono 2, Khairul Anam 3, Rusdhianto Effendi 4, Indra Adji Sulistijono 5, Son Kuswadi 6, Achmad Jazidie
Human-robot relation. Human-robot relation
 Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Introduction to Robotics
 - Lecture 13 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems July
- Lecture 13 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems July
YODA: The Young Observant Discovery Agent
 YODA: The Young Observant Discovery Agent Wei-Min Shen, Jafar Adibi, Bonghan Cho, Gal Kaminka, Jihie Kim, Behnam Salemi, Sheila Tejada Information Sciences Institute University of Southern California Email:
YODA: The Young Observant Discovery Agent Wei-Min Shen, Jafar Adibi, Bonghan Cho, Gal Kaminka, Jihie Kim, Behnam Salemi, Sheila Tejada Information Sciences Institute University of Southern California Email:
II. ROBOT SYSTEMS ENGINEERING
 Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Control System Architectures for Autonomous Agents
 Control System Architectures for Autonomous Agents Lennart Pettersson Mechatronics Division, Department of Machine Design, Royal Institute of Technology, Stockholm, Sweden E-mail: lennartp@damek.kth.se
Control System Architectures for Autonomous Agents Lennart Pettersson Mechatronics Division, Department of Machine Design, Royal Institute of Technology, Stockholm, Sweden E-mail: lennartp@damek.kth.se
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
More Robots in Cages Exploring interactions between animals and robots.
 More Robots in Cages Exploring interactions between animals and robots. Marc Böhlen 1 Abstract Typically, roboticists have invoked the animal world conceptually as a source of inspiration for finding new
More Robots in Cages Exploring interactions between animals and robots. Marc Böhlen 1 Abstract Typically, roboticists have invoked the animal world conceptually as a source of inspiration for finding new
Fuzzy Logic Based Robot Navigation In Uncertain Environments By Multisensor Integration
 Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MF1 94) Las Vega, NV Oct. 2-5, 1994 Fuzzy Logic Based Robot Navigation In Uncertain
Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MF1 94) Las Vega, NV Oct. 2-5, 1994 Fuzzy Logic Based Robot Navigation In Uncertain
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
APPLICATION OF FUZZY BEHAVIOR COORDINATION AND Q LEARNING IN ROBOT NAVIGATION
 APPLICATION OF FUZZY BEHAVIOR COORDINATION AND Q LEARNING IN ROBOT NAVIGATION Handy Wicaksono 1,2, Prihastono 1,3, Khairul Anam 4, Rusdhianto Effendi 2, Indra Adji Sulistijono 5, Son Kuswadi 5, Achmad
APPLICATION OF FUZZY BEHAVIOR COORDINATION AND Q LEARNING IN ROBOT NAVIGATION Handy Wicaksono 1,2, Prihastono 1,3, Khairul Anam 4, Rusdhianto Effendi 2, Indra Adji Sulistijono 5, Son Kuswadi 5, Achmad
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots
 Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots Yu Zhang and Alan K. Mackworth Department of Computer Science, University of British Columbia, Vancouver B.C. V6T 1Z4, Canada,
Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots Yu Zhang and Alan K. Mackworth Department of Computer Science, University of British Columbia, Vancouver B.C. V6T 1Z4, Canada,
Q Learning Behavior on Autonomous Navigation of Physical Robot
 The 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 211) Nov. 23-26, 211 in Songdo ConventiA, Incheon, Korea Q Learning Behavior on Autonomous Navigation of Physical Robot
The 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 211) Nov. 23-26, 211 in Songdo ConventiA, Incheon, Korea Q Learning Behavior on Autonomous Navigation of Physical Robot
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
GA-based Learning in Behaviour Based Robotics
 Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Vision System for a Robot Guide System
 Vision System for a Robot Guide System Yu Wua Wong 1, Liqiong Tang 2, Donald Bailey 1 1 Institute of Information Sciences and Technology, 2 Institute of Technology and Engineering Massey University, Palmerston
Vision System for a Robot Guide System Yu Wua Wong 1, Liqiong Tang 2, Donald Bailey 1 1 Institute of Information Sciences and Technology, 2 Institute of Technology and Engineering Massey University, Palmerston
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach
 Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
A Reactive Robot Architecture with Planning on Demand
 A Reactive Robot Architecture with Planning on Demand Ananth Ranganathan Sven Koenig College of Computing Georgia Institute of Technology Atlanta, GA 30332 {ananth,skoenig}@cc.gatech.edu Abstract In this
A Reactive Robot Architecture with Planning on Demand Ananth Ranganathan Sven Koenig College of Computing Georgia Institute of Technology Atlanta, GA 30332 {ananth,skoenig}@cc.gatech.edu Abstract In this
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Introduction to Embedded and Real-Time Systems W10: Hardware Design Choices and Basic Control Architectures for Mobile Robots
 Introduction to Embedded and Real-Time Systems W10: Hardware Design Choices and Basic Control Architectures for Mobile Robots Outline Hardware design choices Hardware resource management Introduction to
Introduction to Embedded and Real-Time Systems W10: Hardware Design Choices and Basic Control Architectures for Mobile Robots Outline Hardware design choices Hardware resource management Introduction to
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
DiVA Digitala Vetenskapliga Arkivet
 DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
we would have preferred to present such kind of data. 2 Behavior-Based Robotics It is our hypothesis that adaptive robotic techniques such as behavior
 RoboCup Jr. with LEGO Mindstorms Henrik Hautop Lund Luigi Pagliarini LEGO Lab LEGO Lab University of Aarhus University of Aarhus 8200 Aarhus N, Denmark 8200 Aarhus N., Denmark http://legolab.daimi.au.dk
RoboCup Jr. with LEGO Mindstorms Henrik Hautop Lund Luigi Pagliarini LEGO Lab LEGO Lab University of Aarhus University of Aarhus 8200 Aarhus N, Denmark 8200 Aarhus N., Denmark http://legolab.daimi.au.dk
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
BIBLIOGRAFIA. Arkin, Ronald C. Behavior Based Robotics. The MIT Press, Cambridge, Massachusetts, pp
 BIBLIOGRAFIA BIBLIOGRAFIA CONSULTADA [Arkin, 1998] Arkin, Ronald C. Behavior Based Robotics. The MIT Press, Cambridge, Massachusetts, pp. 123 175. 1998. [Arkin, 1995] Arkin, Ronald C. "Reactive Robotic
BIBLIOGRAFIA BIBLIOGRAFIA CONSULTADA [Arkin, 1998] Arkin, Ronald C. Behavior Based Robotics. The MIT Press, Cambridge, Massachusetts, pp. 123 175. 1998. [Arkin, 1995] Arkin, Ronald C. "Reactive Robotic
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 4,100 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 4,100 116,000 120M Open access books available International authors and editors Downloads Our
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
A User Friendly Software Framework for Mobile Robot Control
 A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Situated Robotics INTRODUCTION TYPES OF ROBOT CONTROL. Maja J Matarić, University of Southern California, Los Angeles, CA, USA
 This article appears in the Encyclopedia of Cognitive Science, Nature Publishers Group, Macmillian Reference Ltd., 2002. Situated Robotics Level 2 Maja J Matarić, University of Southern California, Los
This article appears in the Encyclopedia of Cognitive Science, Nature Publishers Group, Macmillian Reference Ltd., 2002. Situated Robotics Level 2 Maja J Matarić, University of Southern California, Los
AI Magazine Volume 18 Number 1 (1997) ( AAAI)
 ( AAAI)") AI Magazine Volume 18 Number 1 (1997) ( AAAI) Articles YODA The Young Observant Discovery Agent Wei-Min Shen, Jafar Adibi, Bonghan Cho, Gal Kaminka, Jihie Kim, Behnam Salemi, and Sheila Tejada The YODA
AI Magazine Volume 18 Number 1 (1997) ( AAAI) Articles YODA The Young Observant Discovery Agent Wei-Min Shen, Jafar Adibi, Bonghan Cho, Gal Kaminka, Jihie Kim, Behnam Salemi, and Sheila Tejada The YODA
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Internalized Plans for Communication-Sensitive Robot Team Behaviors
 Internalized Plans for Communication-Sensitive Robot Team Behaviors Alan R.Wagner, Ronald C. Arkin Mobile Robot Laboratory, College of Computing Georgia Institute of Technology, Atlanta, USA, {alan.wagner,
Internalized Plans for Communication-Sensitive Robot Team Behaviors Alan R.Wagner, Ronald C. Arkin Mobile Robot Laboratory, College of Computing Georgia Institute of Technology, Atlanta, USA, {alan.wagner,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
CYBERPHYSICAL LABORATORY
 5/23/2018 Andrea Calanca - Altair Lab 1 CYBERPHYSICAL LABORATORY Andrea Calanca 5/23/2018 Andrea Calanca - Altair Lab 2 The Practical Guy It works! But I don t know why. 5/23/2018 Andrea Calanca - Altair
5/23/2018 Andrea Calanca - Altair Lab 1 CYBERPHYSICAL LABORATORY Andrea Calanca 5/23/2018 Andrea Calanca - Altair Lab 2 The Practical Guy It works! But I don t know why. 5/23/2018 Andrea Calanca - Altair
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Key-Words: - Neural Networks, Cerebellum, Cerebellar Model Articulation Controller (CMAC), Auto-pilot
, Auto-pilot") erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
Reactive Deliberation: An Architecture for Real-time Intelligent Control in Dynamic Environments
 From: AAAI Technical Report SS-95-02. Compilation copyright 1995, AAAI (www.aaai.org). All rights reserved. Reactive Deliberation: An Architecture for Real-time Intelligent Control in Dynamic Environments
From: AAAI Technical Report SS-95-02. Compilation copyright 1995, AAAI (www.aaai.org). All rights reserved. Reactive Deliberation: An Architecture for Real-time Intelligent Control in Dynamic Environments
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller
 From:MAICS-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller Douglas S. Blank and J. Oliver
From:MAICS-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller Douglas S. Blank and J. Oliver
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Transactions on Information and Communications Technologies vol 1, 1993 WIT Press, ISSN
 A blackboard approach to the mission management for autonomous underwater vehicle E.A.P. Silva, F.L. Pereira & J. Borges de Sousa Institute of Systems and Robotics (I.S.R.) and D.E.E.C. Faculdade de Engenharia
A blackboard approach to the mission management for autonomous underwater vehicle E.A.P. Silva, F.L. Pereira & J. Borges de Sousa Institute of Systems and Robotics (I.S.R.) and D.E.E.C. Faculdade de Engenharia
Towards Integrated Soccer Robots
 Towards Integrated Soccer Robots Wei-Min Shen, Jafar Adibi, Rogelio Adobbati, Bonghan Cho, Ali Erdem, Hadi Moradi, Behnam Salemi, Sheila Tejada Information Sciences Institute and Computer Science Department
Towards Integrated Soccer Robots Wei-Min Shen, Jafar Adibi, Rogelio Adobbati, Bonghan Cho, Ali Erdem, Hadi Moradi, Behnam Salemi, Sheila Tejada Information Sciences Institute and Computer Science Department
Sonar Behavior-Based Fuzzy Control for a Mobile Robot
 Sonar Behavior-Based Fuzzy Control for a Mobile Robot S. Thongchai, S. Suksakulchai, D. M. Wilkes, and N. Sarkar Intelligent Robotics Laboratory School of Engineering, Vanderbilt University, Nashville,
Sonar Behavior-Based Fuzzy Control for a Mobile Robot S. Thongchai, S. Suksakulchai, D. M. Wilkes, and N. Sarkar Intelligent Robotics Laboratory School of Engineering, Vanderbilt University, Nashville,
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Path Planning for Mobile Robots Based on Hybrid Architecture Platform
 Path Planning for Mobile Robots Based on Hybrid Architecture Platform Ting Zhou, Xiaoping Fan & Shengyue Yang Laboratory of Networked Systems, Central South University, Changsha 410075, China Zhihua Qu
Path Planning for Mobile Robots Based on Hybrid Architecture Platform Ting Zhou, Xiaoping Fan & Shengyue Yang Laboratory of Networked Systems, Central South University, Changsha 410075, China Zhihua Qu
STRATEGO EXPERT SYSTEM SHELL
 STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
ON THE WATCH. Tony Belpaeme and Andreas Birk AI-lab, Vrije Universiteit Brussel Belgium
 ON THE WATCH Tony Belpaeme and Andreas Birk AI-lab, Vrije Universiteit Brussel Belgium 97RO007 Draft version Accepted at the ISATA Conference 97, Florence, Italy, 1997. ABSTRACT In this paper we describe
ON THE WATCH Tony Belpaeme and Andreas Birk AI-lab, Vrije Universiteit Brussel Belgium 97RO007 Draft version Accepted at the ISATA Conference 97, Florence, Italy, 1997. ABSTRACT In this paper we describe
An Integrated HMM-Based Intelligent Robotic Assembly System
 An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
The Architecture of the Neural System for Control of a Mobile Robot
 The Architecture of the Neural System for Control of a Mobile Robot Vladimir Golovko*, Klaus Schilling**, Hubert Roth**, Rauf Sadykhov***, Pedro Albertos**** and Valentin Dimakov* *Department of Computers
The Architecture of the Neural System for Control of a Mobile Robot Vladimir Golovko*, Klaus Schilling**, Hubert Roth**, Rauf Sadykhov***, Pedro Albertos**** and Valentin Dimakov* *Department of Computers
A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED ON INTELLIGENT MULTI-AGENTS
 A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED ON INTELLIGENT MULTI-AGENTS Tianhao Tang and Gang Yao Department of Electrical & Control Engineering, Shanghai Maritime University 1550 Pudong Road, Shanghai,
A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED ON INTELLIGENT MULTI-AGENTS Tianhao Tang and Gang Yao Department of Electrical & Control Engineering, Shanghai Maritime University 1550 Pudong Road, Shanghai,
COMPACT FUZZY Q LEARNING FOR AUTONOMOUS MOBILE ROBOT NAVIGATION
 COMPACT FUZZY Q LEARNING FOR AUTONOMOUS MOBILE ROBOT NAVIGATION Handy Wicaksono, Khairul Anam 2, Prihastono 3, Indra Adjie Sulistijono 4, Son Kuswadi 5 Department of Electrical Engineering, Petra Christian
COMPACT FUZZY Q LEARNING FOR AUTONOMOUS MOBILE ROBOT NAVIGATION Handy Wicaksono, Khairul Anam 2, Prihastono 3, Indra Adjie Sulistijono 4, Son Kuswadi 5 Department of Electrical Engineering, Petra Christian
Behavior-Based Control for Autonomous Underwater Exploration
 Behavior-Based Control for Autonomous Underwater Exploration Julio Rosenblatt, Stefan Willams, Hugh Durrant-Whyte Australian Centre for Field Robotics University of Sydney, NSW 2006, Australia {julio,stefanw,hugh}@mech.eng.usyd.edu.au
Behavior-Based Control for Autonomous Underwater Exploration Julio Rosenblatt, Stefan Willams, Hugh Durrant-Whyte Australian Centre for Field Robotics University of Sydney, NSW 2006, Australia {julio,stefanw,hugh}@mech.eng.usyd.edu.au