EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
|
|
|
- Stanley French
- 6 years ago
- Views:
Transcription
1 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics, covering its history, evolution, applications and recent technological advancements. Reference Text Robin R. Murphy, Introduction to AI Robotics, PHI, MIT Press, 2000 Prerequisites Mechanics, Linear algebra, MatLab Evaluation: 40% (mini projects) 20% tutorials 40% (final) Course web: TA: Upeka Premarathna upeka@ent.mrt.ac.lk (ext 3326) Note: we will be using MatLab Robotics ToolBox for lab classes
2 Course Contents Background Mechanical manipulation Manipulator control Robot sensors. Robot system Design Mobile Robots Robot Intelligence How to Identify a Robot A reprogrammable, multifunctional, manipulator designed to move materials, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks (RIA 1970) An automatic device that performs functions normally ascribed to humans or a machine in the form of a human (Webster 1993) A piece of machinery that could perform tasks which are generally ascribed to humans Voice recognition, speech synthesis, obstacle avoidance, face recognition, etc..






3 History of Robots and Robotics The word robot first appeared in a Czeck stage play Rossum s Universal Robots by Karel Capek in 1921 The Czeck word robot means forced labor The word robotics first appeared in the science fiction Runaround by Issac Asimov in Robotics is the science and engineering of using robots. Very Early Robots and Applications 1940s Gray Walter s tortoise 1960s s First modern master-slave teleoperator by Ramond Goertz at Argonne National Lab, USA for handling radioactive materials in a hot-cell using a antograph mechanism In 1954 electrical servomechanisms replaced direct mechanical linkages General Electric s walking truck Ralph Moser. First legged robot, Stanford Research 3000lb, four-legged, walk 4miles/h Institute s Shakey 1960s Force reflection and head-mounted devices for remote camera control. Mosher s Handyman Masterslave electro-hydraulic manipulator, General Electric Co. 2 hands, 10dof
 1967 1960s Teleoperators for welfare.")
.")




4 1960s Telemanipulators and video cameras (USA, USSR, France) Retrieval of an accidentally dropped nuclear bomb from the deep ocean by cable controlled underwater research vehicle (CURV) s Teleoperators for welfare. Commands are taken from the tongue, or other remaining motor signals to actuate wheelchairs, prosthetic arms, etc.. (Aaron Kobrinski, Moscow 1970 Race to the moon. Time delay and stability problem (Ferrel 1965, move-and-wait). 1970: first remotely controlled moon rover Lunakhod (USSR). 11km in 11months Teleoperation in undersea applications. 1970s Unimate, the first industrial A cheaper and safer substitution for robot developed by George divers in searching offshore oil using Devol and Joe Engleberger, small unmanned remote-controlled the father of robotics. submarines with video. France ERIC, - picks and place parts and Hawaii Undersea Research - CAD/CAM systems Laboratory RCV150 s.html Factory Roboticization The major reasons for the growth in the use of industrial robots are their Declining cost Human labor continues to become expensive Manual work within hazardous environments is slow and expensive Becoming faster, more accurate, more capable, and more flexible (re-programmability) Reprogrammability for a variety of jobs (welding, painting..) Deployability for tasks that might be dangerous, or impossible for human workers to perform
![Hard Automation and Soft Automation Small volumes use manual labor volume є [v1,v2] use robots volume > v2 go for hard automation Industrial robots are mostly used for welding or material handling](/docs-images/78/76833549/images/5-0.jpg "(78%), and assembly tasks (10%) according to the US statistics in year 2000.")
 Streams of Robotics Research Mobile")
5 Hard Automation and Soft Automation Small volumes use manual labor volume є [v1,v2] use robots volume > v2 go for hard automation Industrial robots are mostly used for welding or material handling (78%), and assembly tasks (10%) according to the US statistics in year The distinction between a robot and a factory machines (such as NC machines) lies somewhere in the sophistication of the programmability of the device. Robots can be reprogrammable to perform a wide variety of tasks, whereas factory machines, which are generally limited to one class of tasks (fixed automation) Streams of Robotics Research Mobile Robotics Realtime obstacle avoidance Telerobotics Micromanipulation Polybots (modular reconfigurable Robots) Medical robotics (telesurgery) Planetary exploration robots Micromechanical flying robots Climbing robots Milibots, millibot teams Soccer playing robots Walking machines Service and care-giving robots Robotic prosthetic limbs Exploration and mapping robots Grasping Biomimetic robots Expressive Robotic creatures Bipedal walking Entertainment robots Military

6 Realtime Obstacle Avoidance For robots to be able to inhabit human-populated dynamic environments such as offices, hotels, hospitals, etc.. Classical Potential Field O. Khatib, RI, Stanford Univ., USA Velocity Dipole Field S. R. Munasinghe Univ. of Moratuwa, SL Deliberative Behavior and Reactive Behavior (imagine how humans walk to the destination avoiding obstacles getting on the way) Telerobotic System Layout
")




7 Japan (LC) Local Controller Korea (RS) Remote Supervisor Telerobotic Minigolf Supervisory Control Task Resolved Motion Control 3 joints by the RS 2joints by the LC Master-Slave Teleoperation Ground-Space Teleoeration


8 Biotechnology Microsurgery Microassembly Microchips Micromanipulation Polybots Modular Reconfigurable Robots


9 Medical Robotics Minimum Invasive Surgery (MIS)



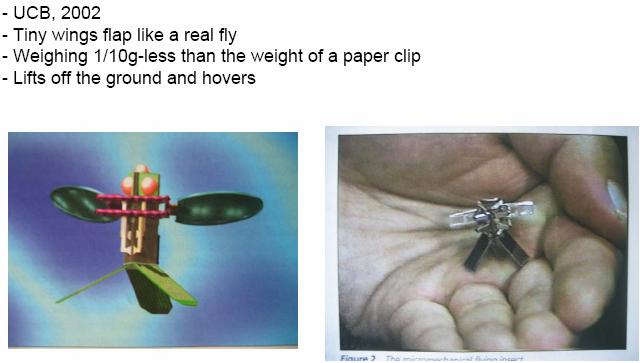
10 Planetary Exploration Robots Obstacle Avoidance Spirit moves on Mars Micromechanical Flying Insects





11 Miniature Climbing Robots Millibots Soccer Playing Robots


12 Walking Machines Service and Care-giving Robots


13 Robotic Prosthetic Limbs Exploration and Mapping Robots



14 Grasping Biomimetic Robots Extracting principles from biology and applying them to man-made devices, particularly robots. Uses nature s evolved way of doing things instead of adopting algorithmic-intense AI cockroaches can run over obstacles without slowing down, or knocking off the course We are not trying to copy a cockroach, which would be impractical. And, besides, who would want one? How birds fly, how fish swim, and how humans walk can best be discovered by trying to reproduce these activities in a device The knowledge gained might not be immediately useful. But it could some day lead to useful technologies based on, not necessarily mimicking these phenomena



15 Expressive Robotic Creatures Bipedal Walking and Humanoids New bipedal walking robots developed on simple techniques Honda Asimo runs at 3km/h (Dec. 2004) Is it human-like walking?



16 Humanitarian and Military CMU countermine robot can identify buried landmines. Uses ground penetrating radar for identifying underground utilities
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Teleoperation. History and applications
 Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Robotics Intelligent connection of the perception to action. Applications
 Robotics Intelligent connection of the perception to action Applications Applications Automotive industry Assembly Medical laboratories Medecine Nuclear energy Agriculture Spatial exploration Underwater
Robotics Intelligent connection of the perception to action Applications Applications Automotive industry Assembly Medical laboratories Medecine Nuclear energy Agriculture Spatial exploration Underwater
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
BOMB ROBOTS NASA CURIOSITY MARS ROVER
 BOMB ROBOTS This robot is used by FBI bomb-squads in Oklahoma. It allows access to the bomb without endangering human life as it investigates, moves, and when necessary, disables the bomb. NASA CURIOSITY
BOMB ROBOTS This robot is used by FBI bomb-squads in Oklahoma. It allows access to the bomb without endangering human life as it investigates, moves, and when necessary, disables the bomb. NASA CURIOSITY
Robotics, telepresence and minimal access surgery - A short and selective history
 Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
A Quick history. Ioannis Rekleitis
 A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
 A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.") WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck. What is a Robot The difference between a robot and a manipulator Run by
WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck. What is a Robot The difference between a robot and a manipulator Run by
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
History of Robotics. University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action.
 History of Robotics University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action Codrin Pasca May 5, 2003 Introduction Definitions The early stages Our times
History of Robotics University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action Codrin Pasca May 5, 2003 Introduction Definitions The early stages Our times
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Cost Oriented Humanoid Robots
 Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
E Technology: A. Innovations Activity: Introduction to Robotics
 Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Locomotion: Legs and Artificial Muscle. SUMMARY: Many labs at the forefront of robotic research, especially locomotive
 Topic: Locomotion, D1 Name: Gregg O Marr Date: March 2, 2000 Locomotion: Legs and Artificial Muscle SUMMARY: Many labs at the forefront of robotic research, especially locomotive research, are experimenting
Topic: Locomotion, D1 Name: Gregg O Marr Date: March 2, 2000 Locomotion: Legs and Artificial Muscle SUMMARY: Many labs at the forefront of robotic research, especially locomotive research, are experimenting
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
ENME 489L: Biologically Inspired Robotics
 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Design and function. How can technology make our lives easier? 1 d Technology helps us travel far. 2 It helps people keep in touch.
 Unit 1 Design and function How can technology make our lives easier? 1 How does technology help us? Match and write. Also think of your own ideas. 1 d Technology helps us travel far. 2 It helps people
Unit 1 Design and function How can technology make our lives easier? 1 How does technology help us? Match and write. Also think of your own ideas. 1 d Technology helps us travel far. 2 It helps people
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Conceptual and Mechanical Design of Master- Slave Robot for Painting Application
 UNIVERSITI TEKNIKAL MALAYSIA MELAKA Conceptual and Mechanical Design of Master- Slave Robot for Painting Application Thesis submitted in accordance with the partial requirements of the Universiti Teknikal
UNIVERSITI TEKNIKAL MALAYSIA MELAKA Conceptual and Mechanical Design of Master- Slave Robot for Painting Application Thesis submitted in accordance with the partial requirements of the Universiti Teknikal
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
COMP5121 Mobile Robots
 COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
VOICE CONTROL BASED PROSTHETIC HUMAN ARM
 VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Robotics in Austria. 1 Introduction. 2 Robots
 ROBOTICS IN AUSTRIA 23 Robotics in Austria Peter Kopacek Intelligent Handling and Robotics IHRT Vienna University of Technology Favoritenstrasse 9; E325A6 1040 Wien Phone: +43 1 58801 31800 email: kopacek@ihrt.tuwien.ac.at
ROBOTICS IN AUSTRIA 23 Robotics in Austria Peter Kopacek Intelligent Handling and Robotics IHRT Vienna University of Technology Favoritenstrasse 9; E325A6 1040 Wien Phone: +43 1 58801 31800 email: kopacek@ihrt.tuwien.ac.at
4/1/2011. Ken Goldberg UC Berkeley. Robot
 The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
Les apports de la robotique collaborative en santé
 Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics. AI and Robots. A History of Robots in AI
 Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
DREAM BIG ROBOT CHALLENGE. DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course.
 DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
TJHSST Senior Research Project Evolving Motor Techniques for Artificial Life
 TJHSST Senior Research Project Evolving Motor Techniques for Artificial Life 2007-2008 Kelley Hecker November 2, 2007 Abstract This project simulates evolving virtual creatures in a 3D environment, based
TJHSST Senior Research Project Evolving Motor Techniques for Artificial Life 2007-2008 Kelley Hecker November 2, 2007 Abstract This project simulates evolving virtual creatures in a 3D environment, based
Abbreviated Modern History of Intelligent Mobile Robotics. August 26, 2014
 Abbreviated Modern History of Intelligent Mobile Robotics August 26, 2014 Reading Assignment Read Chapter 2 of Siegwart text (Locomotion) We ll begin studying that material on Thursday Objectives Understand
Abbreviated Modern History of Intelligent Mobile Robotics August 26, 2014 Reading Assignment Read Chapter 2 of Siegwart text (Locomotion) We ll begin studying that material on Thursday Objectives Understand