ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
|
|
|
- Nicholas Curtis
- 5 years ago
- Views:
Transcription
1 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino
2 What is Robotics? Robotics studies robots For history and definitions see the 2013 slides Robots can be used in different contexts and are classified as 1. Industrial robots 2. Humanoid & biomimetic robots 3. Service robots 4. Exploration robots 5. Service & exploration robots can be a) wheeled (rovers) b) flying (UAS,UAV, Quadcopters, etc.) c) legged There is a partial overlapping of these classes 2
 5-6 (rarely 7) dof Internal")

3 Industrial robots Similar to a human arm with a wrist and a final hand for holding tools Rigid mechanical structure to guarantee accuracy and precision (repeatability) 5-6 (rarely 7) dof Internal (proprioceptive) joint sensors only * recent developments include vision sensors High payloads Reduction gears Well known and quasi-static environment Strict safety requirements Externally supplied power 3





4 Humanoid robots Similar to human body with a torso, two arms, two legs, 2-5 fingered hands Complex mechanical structure to guarantee stable bipedal motion Many dofs Internal and external sensors Low payloads Reduction gears or direct drives Unknown and changing environment: land only Limited autonomy Safety requirements TBD HMI and social acceptance issues 4

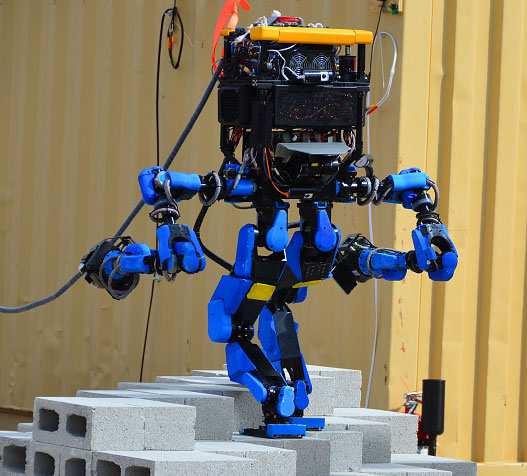



5 Examples from DRC


6 Lots of onboard sensors 6




7 Examples 7





8 Biomimetic robots Similar to animals, insects, fishes, birds, etc. May have more than two legs, no legs at all, wings, fins; can walk, crawl, swim, fly Internal and external sensors Low medium payloads, depending on structure No safety requirements Unknown and changing environment: sea, air, land 8
9 Service robots May have different motion structures: mostly wheeled (differential drives or 4-wheels), but UAVs are becoming popular Mechanical structure is important, but software is a critical issue Internal and external sensors Cameras (single, stereo 3D, ToF, omnidirectional) Laser scanners and Lidars Proximity sensors Special purpose, e.g., thermo-cameras Low to medium size payloads (according to use) HMI is important Unknown and changing environment: indoor (flat), outdoor (land, air, underwater) Privacy and legal issues important 9
10 UAVs Unmanned Aerial (or Autonomous) Vehicles are known due to their use as military drones, but now quadcopters are very common Civil applications are becoming important surveillance and patrolling of large structures and sites disaster area analysis; search and rescue (SAR) agricultural and environmental remote sensing leisure: commercial and filmmaking material transport Mainly outdoor, but indoor use is gaining interest Unknown environment Limited payload Limited autonomy (battery life is critical) and often tele-operated Mostly vision sensors (lightweight) Privacy and legal issues important 10







11 Examples 11


 Usually tele-operated, but partial autonomy")
12 Exploration robots Used for planetary or deep space exploration e.g., Spirit, Opportunity, Curiosity, future Moon and Mars rovers Some used for underwater or harsh environments (volcanoes, Antarctica exploration, etc.) Usually tele-operated, but partial autonomy necessary due to long time delays between Earth and Mars 12
13 Course content 1 Kinematic Chains: constitutive elements; KC types: open, closed; KC dofs: redundant, non redundant chains Industrial robot types: arms and wrists Kinematic chains: algorithms for fast computation of direct and inverse position and velocity kinematic functions Denavit-Hartenberg conventions and DH parameters Homogeneous matrices Jacobian matrices Statics: kineto-static relations Dynamics: Lagrange equations, general form for control Control algorithms: independent joints linear control, MIMO nonlinear control 13
14 Course content 2 Wheeled rovers structures, differential drive kinematics non-holonomy odometry issues Onboard sensors: some types will be briefly analyzed Mapping, localization and SLAM issues Path planning 14
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Content. Robotik: Möglichkeiten, Trends und Visionen. Introduction. Robotics the challenges and technology drivers. Robot Examples
 Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Kinematic And Dynamic Analysis Of A Robot Arm Used For All Terrain Robot
 Kinematic And Dynamic Analysis Of A Robot Arm Used For All Terrain Robot Amey V. Sutar Production Engineering Dept. Name of organization - COEP, Pune, India Dr. S. S. Ohol Mechanical Engineering Dept.
Kinematic And Dynamic Analysis Of A Robot Arm Used For All Terrain Robot Amey V. Sutar Production Engineering Dept. Name of organization - COEP, Pune, India Dr. S. S. Ohol Mechanical Engineering Dept.
Cost Oriented Humanoid Robots
 Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ATLAS. High Mobility, Humanoid Robot ROBOT 17 ALLSTARS -
 ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
ZJU Team Entry for the 2013 AUVSI. International Aerial Robotics Competition
 ZJU Team Entry for the 2013 AUVSI International Aerial Robotics Competition Lin ZHANG, Tianheng KONG, Chen LI, Xiaohuan YU, Zihao SONG Zhejiang University, Hangzhou 310027, China ABSTRACT This paper introduces
ZJU Team Entry for the 2013 AUVSI International Aerial Robotics Competition Lin ZHANG, Tianheng KONG, Chen LI, Xiaohuan YU, Zihao SONG Zhejiang University, Hangzhou 310027, China ABSTRACT This paper introduces
Implementation of a Self-Driven Robot for Remote Surveillance
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Services Mobile manipulation for handling hazardous material For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Services Mobile manipulation for handling hazardous material For each of the following aspects, especially
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Artificial Intelligence Game Playing/Robotics
 Artificial Intelligence Game Playing/Robotics Course 254482 Lecturer : Sukchatri PRASOMSUK University of Phayao, ICT Slide by Jeremy Gow Department of Computing, Imperial College, London Two Player Games
Artificial Intelligence Game Playing/Robotics Course 254482 Lecturer : Sukchatri PRASOMSUK University of Phayao, ICT Slide by Jeremy Gow Department of Computing, Imperial College, London Two Player Games
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
ENSTA Bretagne Robotics Topic Group
 ENSTA Bretagne Robotics Topic Group General presentation The Robotics Topic Group of STIC Department at ENSTA Bretagne works mainly on problems found in mobile robotics for marine, submarine, ground, aerial,
ENSTA Bretagne Robotics Topic Group General presentation The Robotics Topic Group of STIC Department at ENSTA Bretagne works mainly on problems found in mobile robotics for marine, submarine, ground, aerial,
Autonomous UAV support for rescue forces using Onboard Pattern Recognition
 Autonomous UAV support for rescue forces using Onboard Pattern Recognition Chen-Ko Sung a, *, Florian Segor b a Fraunhofer IOSB, Fraunhoferstr. 1, Karlsruhe, Country E-mail address: chen-ko.sung@iosb.fraunhofer.de
Autonomous UAV support for rescue forces using Onboard Pattern Recognition Chen-Ko Sung a, *, Florian Segor b a Fraunhofer IOSB, Fraunhoferstr. 1, Karlsruhe, Country E-mail address: chen-ko.sung@iosb.fraunhofer.de
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
PEGASUS : a future tool for providing near real-time high resolution data for disaster management. Lewyckyj Nicolas
 PEGASUS : a future tool for providing near real-time high resolution data for disaster management Lewyckyj Nicolas nicolas.lewyckyj@vito.be http://www.pegasus4europe.com Overview Vito in a nutshell GI
PEGASUS : a future tool for providing near real-time high resolution data for disaster management Lewyckyj Nicolas nicolas.lewyckyj@vito.be http://www.pegasus4europe.com Overview Vito in a nutshell GI
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
Industrial and service robotics: state of the art and trends Paolo Rocco
 Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs
 Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Mekanisme Robot - 3 SKS (Robot Mechanism)
") Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Toward autonomous airships: research and developments at LAAS/CNRS
 Toward autonomous airships: research and developments at LAAS/CNRS Simon LACROIX LAAS / CNRS 7, Ave du Colonel Roche F-31077 TOULOUSE Cedex FRANCE E-mail: Simon.Lacroix@laas.fr Phone: +33 561 33 62 66
Toward autonomous airships: research and developments at LAAS/CNRS Simon LACROIX LAAS / CNRS 7, Ave du Colonel Roche F-31077 TOULOUSE Cedex FRANCE E-mail: Simon.Lacroix@laas.fr Phone: +33 561 33 62 66
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks
 Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Visual Tracking and Surveillance System
 Visual Tracking and Surveillance System Neena Mani 1, Ammu Catherine Treesa 2, Anju Sivadas 3, Celus Sheena Francis 4, Neethu M.T. 5 Asst. Professor, Dept. of EEE, Mar Athanasius College of Engineering,
Visual Tracking and Surveillance System Neena Mani 1, Ammu Catherine Treesa 2, Anju Sivadas 3, Celus Sheena Francis 4, Neethu M.T. 5 Asst. Professor, Dept. of EEE, Mar Athanasius College of Engineering,
Heuristic localization and mapping for active sensing with humanoid robot NAO
 MOJTABA HEIDARYSAFA Heuristic localization and mapping for active sensing with humanoid robot NAO Master of Science thesis Examiners: Prof. Risto Ritala, Prof. Jose Martinez Lastra Examiner and topic approved
MOJTABA HEIDARYSAFA Heuristic localization and mapping for active sensing with humanoid robot NAO Master of Science thesis Examiners: Prof. Risto Ritala, Prof. Jose Martinez Lastra Examiner and topic approved
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles. Dr. Nick Krouglicof 14 June 2012
 Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Unmanned/Robotic Systems
 Unmanned/Robotic Systems A Revolutionary Technology on an Evolutionary Path ASEE Presentation February 9, 2016 Michael Toscano USZ (Unmanned Systems Zealot) Challenge or Tasker Policy Questions What should
Unmanned/Robotic Systems A Revolutionary Technology on an Evolutionary Path ASEE Presentation February 9, 2016 Michael Toscano USZ (Unmanned Systems Zealot) Challenge or Tasker Policy Questions What should
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Introduction to Robotics
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Introduction to Robotics Dr.-Ing. John Nassour 11.10.2016 Suggested literature General Information Prerequisites: Basic knowledge
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Introduction to Robotics Dr.-Ing. John Nassour 11.10.2016 Suggested literature General Information Prerequisites: Basic knowledge
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
The rise of the robots
 The rise of the robots PENDERS, Jacques Available from Sheffield Hallam University Research Archive (SHURA) at: http://shura.shu.ac.uk/8244/ This document is the
The rise of the robots PENDERS, Jacques Available from Sheffield Hallam University Research Archive (SHURA) at: http://shura.shu.ac.uk/8244/ This document is the
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
A STUDY ON HEXAPOD ROBOTS AND MODELING BY MEANS OF CAD TECHNIQUES
 A STUDY ON HEXAPOD ROBOTS AND MODELING BY MEANS OF CAD TECHNIQUES Thiago Augusto Ferreira, thiago_ferreir@ufrj.br Universidade Federal do Rio de Janeiro, Polytechnic School, Mechanical Engineering Department,
A STUDY ON HEXAPOD ROBOTS AND MODELING BY MEANS OF CAD TECHNIQUES Thiago Augusto Ferreira, thiago_ferreir@ufrj.br Universidade Federal do Rio de Janeiro, Polytechnic School, Mechanical Engineering Department,