Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
|
|
|
- Silvia Patrick
- 5 years ago
- Views:
Transcription
1 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
2 Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical concepts, geometry, linear algebra, calculus, CS 480, CS 580! Course web page cs.gmu.edu/~kosecka/cs685/! Homeworks about every 2 weeks, Midterm, Final Project! Choose from the list of projects, suggest your own! Implement one of the covered methods on robot/robot simulator, come up with new ideas of robotics tasks, implement techniques on real robot! Write a report and prepare the final presentation! I would encourage use of open source tools!!
3 Recommended Text! R. Siegwart and I. Nourbakhsh: Introduction to Autonomous Mobile Robots, MIT Press, 2004! [1] S. LaValle: Planning Algorithms, Cambridge Press,! [2] S. Thrun, W. Burghart, D. Fox: Probabilistic Robotics! [4] S. Russell and P. Norvig: Artificial Intelligence: A Modern Approach! [5] R. Sutton and A. G. Barto: Introduction to Reinforcement Learning (on-line materials see course www)!
4 Course Logistics! Required Software MATLAB (with Image Processing toolbox), Octave (open source Matlab like language)! Robot simulators, real robots! Availability of robotics platforms! Pioneers with range sensors, cameras! Turtlebot! Humanoid Small soccer league! Simulators! List of resources
5 Focus of the course! General introduction and techniques! Overview of the approaches in mobile robotics! Motion Planning! Perception, Decision/Control! Probabilistic robotics, Localization, Mapping! Reinforcement learning! Hand of experience with simulation! Possibilities of programming real robots equipped with range sensors, RGB-D cameras! Current trends and areas of robotic technologies!!
6 Applications - Robots in manufacturing/material handling!! Manhattan project (1942) handling and processing of radioactive! materials Telemanipulation! Manufacturing! - storage, transport delivery! - table top tasks, material sorting, part feeding conveyor belt! - microelectronics, packaging! - harbor transportation! - construction (automatic cranes)!! Suitable for hard repetitive tasks heavy handling or fine positioning! Successful in restricted environments, limited sensing is sufficient! limited autonomy!! Autonomous Robotic Systems! AGV s - automated guided vehicles! AUV s - automated unmanned vehicles!
7 Applications - Space Robotics! 50-ties US space program, exploration of planets, collecting samples! Astronauts bulky space suits difficult! NASA, JPL, DARPA sponsoring agencies! Space programs, military application surveillance, assistance! Planetary Rovers initially controlled by humans! - large time delays,! - poor communication connections! Need for (semi) autonomy!! Teleoperation Mars Rover!! Human operator controls the robot! Local site human views the sensory data, sends the commands! Remote site sensors acquire the information!

8 Example 1:Building Virtual Models of Mars! Example of stereo pipeline, from raw data, preprocessing,! meshes, texture maps! See


9 Apollo!! Lunar Rovers!! Current NASA Prototype!


10 ! Applications: Navigation in difficult terrain/harsh conditions! Antarctica search for samples of meteorites! Volcanos analyze gas samples from volcanos!


11 Applications: Underwater robotics! Sensor network! Remotely Operated robot for ocean exploration!



12 !! Robots in the service of humans! Robotic surgery - DaVinci robotic surgery robot human assisted! da_vinci_video_overview.aspx! Robotics in rehabilitation surgery (Hocomo Inc)! Mobile Robots! - courier in buildings and hospitals, vacuum cleaners,!






13 Variety of domains and tasks!




14 Games and Entertainment! Furbies! Aibos Latter & Macaron! Aibo soccer league - RoboCup!
!")
15 Rhino First Museum Tour giving robot! University of Bonn ( 96)!



16 Humanoid Robots! MIT Cog Project!






17 percepts! Environment! Models! actions!

18 Architecture!! Interface/ Language! Semantic Parser! Task planner! Deliberative decision making! Perception! Map Builder! Action! Localization! Perception! Collision Detection/ Kinematics Dynamics Control! Action! Path Planner! Feedback/Reactive control!

19 Architecture!! Interface/ Language! Semantic Parser! Task planner! Perception! Map Builder! Action! Localization! Perception! Collision Detection/ Kinematics Dynamics Control! Action! Path Planner! Feedback/Reactive control!
20 Architecture!! Interface/ Language! Semantic Parser! Mapping! and localization! Perception! Task planner! Map Builder! Action! Localization! Perception! Collision Detection/ Kinematics Dynamics Control! Action! Path Planner!



21 Architecture!! Deliberative Control and decision making! Semantic Parser! Interface/ Language! Task planner! Perception! Map Builder! Action! Localization! Perception! Collision Detection/ Kinematics Dynamics Control! Action! Path Planner!
22 Autonomous Driving! DARPA Grand Challenge 2005! 2004 CMU vehicle drove 7.36 miles out of 150! teams finished, Stanford won! DARPA Urban Challenge 2007! urban environment other vehicles present! 6 teams finished! Google Self-Driving Car! by July M miles, 14 minor accidents! Ernst Dickmans / Mercedes Benz 1987! 1758 Km, 60 miles per hour! Parking maneuvers, overtake maneuvers, skidding!


23 Robotic Navigation! Stanford Stanley Grand Challenge! Outdoors unstructured env., single vehicle! Urban Challenge! Outdoors structured env., mixed traffic, traffic rules!
24 Intelligent Robotic System! Mechanical System with some degree of autonomy! Three Basic Components of the Robotic System! SENSE process information from the sensors! PLAN compute the right commands/directives! ACT produces actuator commands! Different organization of these functionalities gives rise to different robot architectures!
25 Robot Components (Stanley)! Sensors! Actuators-Effectors! Locomotion System! Computer system Architectures (the brain)! Lasers, camera, radar, GPS, compass, antenna, IMU,! Steer by wire system! Rack of PC s with Ethernet for processing information! from sensors!

26 Stanley Software System!


27 Terrain mapping using lasers! Determining obstacle course!



28 APPLICATIONS Unmanned Aerial Vehicles (UAVs) Rate: 10Hz Accuracy: 5cm, 4 o Berkeley Aerial Robot (BEAR) Project


29 Robots and GMU! Marker based motion capture systems! Haptics phantoms! EEG!
30 Overview of the topics! Kinematics, Kinematic Chains, Mobile Robot kinematics! Notion of state, sensing state, elementary control! Potential Field Based Methods, Robot Behaviors! Motion planning, search! Robot Perception Sensors, Visual Perception, Computer Vision!! Foundations of Probabilistic Robotics! State estimation and Tracking! Localization using Particle Filters! Simultaneous Localization and Mapping using vision and RGB-D data!! Dynamic Programming and Markov Decision Processes! Learning how to act Reinforcement Learning!!
31 Course Overview PART I! Modeling aspects of the robotic system! Notion of state, state evolution, kinematics! x Systems view vector denotes the state of the system, vector u types of controls/actions the system can carry out we will discuss ways of characterizing the motion of the system! x t+1 = f(x t, u t ) x(t) =f(x(t), u(t))
32 Modeling Geometric transformation! Modeling Rigid Body Motion! Modeling Kinematic Chains!
33 Mobile Robot Kinematics! Two wheels! Three wheels! Omnidirectional Drive! Synchro Drive!
34 Motion Control: Open Loop Control! trajectory (path) divided in motion segments of clearly defined shape:! straight lines and segments of a circle.! control problem:! pre-compute a smooth trajectory! based on line and circle segments! y I goal x I
35 y R ω (t) start Motion Control: Feedback Control, Problem Statement! Find a control matrix K, if exists! v(t) θ x R e goal!!! K k = k with k ij =k(t,e)! such that the control of v(t) and ω(t)! R x v( t) = = K e K y ω ( t) θ drives the error e to zero.! k k lim e( t) = 0 t k k 13 23



36 Overview: Robot Perception! Original! image! Strong +! connected! weak edges! Interest points!

37 Jana Kosecka



38 Overview: Mapping and localization! Visual odometry!! 3D reconstruction!

39 Visual Odometry!


40 Overview: Semantic Segmentation!! Simultaneous Segmentation and Categorization! We usually distinguish two types of categories: stuff (sky, road, mountains all with not well defined shape) and objects! tree sky signsymbol building building building columnpole tree building columnpole sky columnpole car car building sidewalk sidewalk road




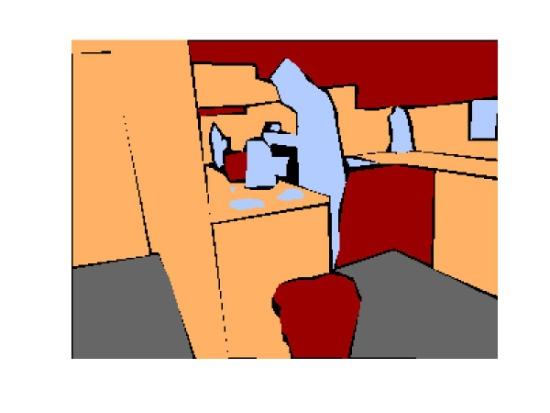







41 NYU v2 - Ground Truth! Ground Struct. Furnit. Props! Semantic Segmentation!!
42 !! Dealing with Uncertainty! Probabilistic Robotics! Taking into account uncertainty of sensors and actions! Localization in the presence of uncertainty,! Map building! Robot Perception! How to process information from sensors! Visual Sensing! Range Sensing!!

!")
43 Grid-Based Metric Approach! Grid Map of the Smithsonian s National Museum of American History in Washington DC. (Courtesy of Wolfram Burger et al.)!! Grid: ~ 400 x 320 = points! Courtesy S. Thrun, W. Burgard!
! Believe state! Courtesy S. Thrun, W.")
44 Gaining Information through motion: (Multihypotheses tracking)! Believe state! Courtesy S. Thrun, W. Burgard!
45 Markov Localization (4): Applying probability theory to robot localization! Bayes rule:!! Map from a belief state and a action to new belief state (ACT):! Summing over all possible ways in which the robot may have reached l.! Markov assumption: Update only depends on previous state and its most recent actions and perception.!
46 Environment Representation! Topological Maps! Metric Topological Maps! Fully Metric Maps (continuos Courtesy K. Arras! Recognizable Locations! or discrete)! y 200 m 50 km 2 km 100 km {W} x
47 57
48 58
49 59
50 60
51 61
52 62

53 63
54 64
55 65
56 66
57 67
58 68
59 69
60 70
61 71


62 5.5.2! Map Representation: Decomposition (2)! Fixed cell decomposition! Narrow passages disappear!
63 Motion Planning! Algorithms for determining movements of the robot in cluttered environments! General techniques 1 st assumption the environment is known! Continuous representations of environments! Discrete representations of the environments! Deterministic methods optimality, feasibility guarantees! Motion planning for mobile robots, arbitrary shaped parts, articulated structures! Randomized algorithms for motion planning!


! Agent!")
64 Reinforcement Learning! How to improve performance over time from our own/ systems experience! Goal directed learning from interaction! How to map situations to action to maximize reward! state(t)! Agent! reward(t+1)! action(t)! state(t+1)! Environment!
65 Recent Fun Demonstrations! Athletic power of quadcoptors! Kiva Systems warehouse material handling! Fetch industrial-robots/fetch-robotics-introduces-fetch-andfreight-your-warehouse-is-now-automated!
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
and : Principles of Autonomy and Decision Making. Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010
 16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION
 ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
Acknowledgements INTRODUCTION. What is a robot? What is a robot
 Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements. Naturally, all errors introduced are my responsibility. cisc3415-fall2013-ozgelen-lect01 2
 INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
Robot Mapping. Introduction to Robot Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
CSE 473 Artificial Intelligence (AI) Outline
 Outline") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Logistics Some Key Points
 Logistics Some Key Points For students just joined, read carefully first Sakai announcement and the slides of the first lecture on course logistics Use CS460F@gmail.com for any course related questions
Logistics Some Key Points For students just joined, read carefully first Sakai announcement and the slides of the first lecture on course logistics Use CS460F@gmail.com for any course related questions
CS686: Robot Motion Planning and Applications
 CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt.
 Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Services Mobile manipulation for handling hazardous material For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Services Mobile manipulation for handling hazardous material For each of the following aspects, especially
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
CPS331 Lecture: Intelligent Agents last revised July 25, 2018
 CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CSE 473 Artificial Intelligence (AI)
") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Intelligent Robotics Assignments
 Intelligent Robotics Assignments Luís Paulo Reis Assignment#1 Oral Presentation about an Intelligent Robotic New Trend Groups: 1 to 3 students 8 15 Minutes Oral Presentation 15 20 Slides (including appropriate
Intelligent Robotics Assignments Luís Paulo Reis Assignment#1 Oral Presentation about an Intelligent Robotic New Trend Groups: 1 to 3 students 8 15 Minutes Oral Presentation 15 20 Slides (including appropriate
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots
 A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
Field Robots. Abstract. Introduction. Chuck Thorpe and Hugh Durrant-Whyte
 Field Robots Chuck Thorpe and Hugh Durrant-Whyte Robotics Institute, Carnegie Mellon University, Pittsburgh USA; Australian Centre for Field Robotics, The University of Sydney, Sydney NSW 2006, Australia
Field Robots Chuck Thorpe and Hugh Durrant-Whyte Robotics Institute, Carnegie Mellon University, Pittsburgh USA; Australian Centre for Field Robotics, The University of Sydney, Sydney NSW 2006, Australia
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
2006 CCRTS THE STATE OF THE ART AND THE STATE OF THE PRACTICE. Network on Target: Remotely Configured Adaptive Tactical Networks. C2 Experimentation
 2006 CCRTS THE STATE OF THE ART AND THE STATE OF THE PRACTICE Network on Target: Remotely Configured Adaptive Tactical Networks C2 Experimentation Alex Bordetsky Eugene Bourakov Center for Network Innovation
2006 CCRTS THE STATE OF THE ART AND THE STATE OF THE PRACTICE Network on Target: Remotely Configured Adaptive Tactical Networks C2 Experimentation Alex Bordetsky Eugene Bourakov Center for Network Innovation
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as