Autonomous Mobile Robots
|
|
|
- Byron Gilmore
- 5 years ago
- Views:
Transcription
1 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given or autonomously built) perceive and analyze the environment find its position within the environment plan and execute the movement This course will deal with Locomotion and Navigation (Perception, Localization, Planning and motion generation)
2 Content of the Course. Introduction 2. Locomotion 3. Behaviour-based robotics 4. Mobile Robot Kinematics 5. Perception 6. Mobile Robot Localization 7. Planning and Navigation Other Aspects of Autonomous Mobile Systems Applications
3 Goal of today s lecture (/4) Introduce the basic problems of mobile robotics the basic questions examples and it s challenges Introduce some basic terminology Environment representation and modeling Introduce the key challenges of mobile robot navigation Localization and map-building Some examples/videos showing the state-of-the-art
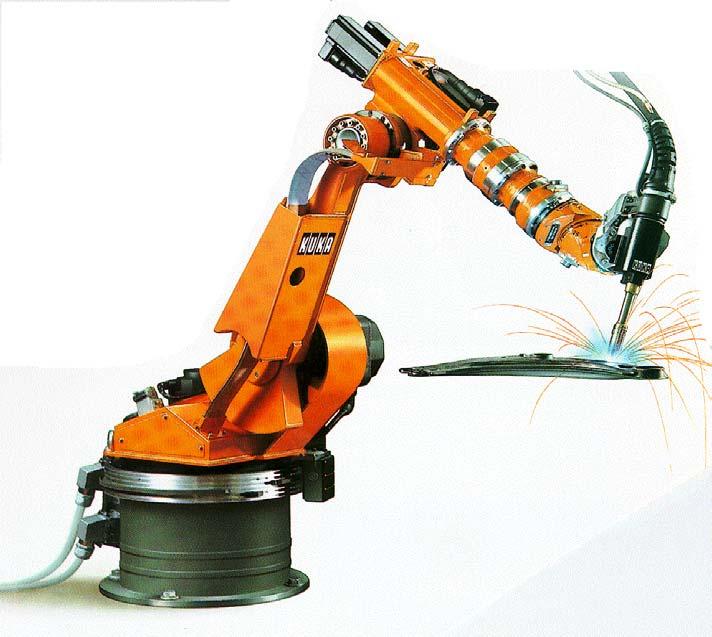

4 From Manipulators to Mobile Robots
5 General Control Scheme for Mobile Robot Systems Knowledge, Data Base Mission Commands Localization Map Building "Position" Global Map Cognition Path Planning Environment Model Local Map Path Perception Information Extraction Raw data Sensing Path Execution Actuator Commands Acting Motion Control Real World Environment
6 Applications of Mobile Robots Indoor Structured Environments Outdoor Unstructured Environments transportation industry & service space mining sewage tubes customer support museums, shops.. research, entertainment, toy cleaning.. large buildings surveillance buildings agriculture forest air construction demining underwater fire fighting military

7 Automatic Guided Vehicles Newest generation of Automatic Guided Vehicle of VOLVO used to transport motor blocks from on assembly station to an other. It is guided by an electrical wire installed in the floor but it is also able to leave the wire to avoid obstacles. There are over 4000 AGV only at VOLVO s plants.

. http://www.")
8 Helpmate HELPMATE is a mobile robot used in hospitals for transportation tasks. It has various on board sensors for autonomous navigation in the corridors. The main sensor for localization is a camera looking to the ceiling. It can detect the lamps on the ceiling as reference (landmark).

9 BR700 Cleaning Robot BR 700 cleaning robot developed and sold by Kärcher Inc., Germany. Its navigation system is based on a very sophisticated sonar system and a gyro. de
-")

10 ROV Tiburon Underwater Robot Picture of robot ROV Tiburon for underwater archaeology (teleoperated)- used by MBARI for deep-sea research, this UAV provides autonomous hovering capabilities for the human operator.

11 The Pioneer Picture of Pioneer, the teleoperated robot that is supposed to explore the Sarcophagus at Chernobyl

. http://www.")
12 The Pioneer PIONEER is a modular mobile robot offering various options like a gripper or an on board camera. It is equipped with a sophisticated navigation library developed at Stanford Research Institute (SRI).

13 The B2 Robot B2 of Real World Interface is a sophisticated mobile robot with up to three Intel Pentium processors on board. It has all different kinds of on board sensors for high performance navigation tasks.


.")
14 The Khepera Robot KHEPERA is a small mobile robot for research and education. It is only about 60 mm in diameter. Additional modules with cameras, grippers and much more are available. More than 700 units were sold by the end of 998). K-Team.html


15 Forester Robot Pulstech developed the first industrial like walking robot. It is designed moving wood out of the forest. The leg coordination is automated, but navigation is still done by the human operator on the robot. /

16 Robots for Tube Inspection HÄCHER robots for sewage tube inspection and reparation. These systems are still fully teleoperated. EPFL / SEDIREP: Ventilation inspection robot
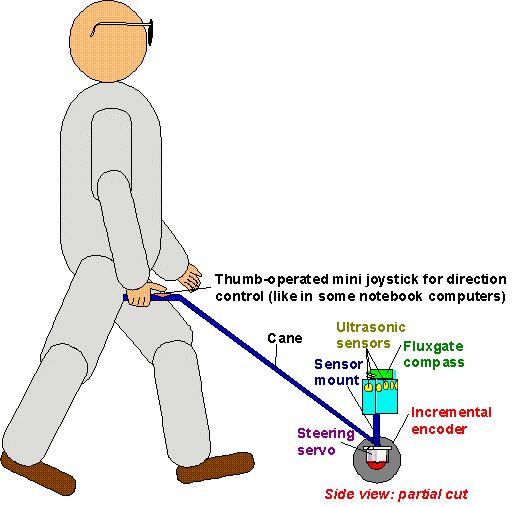



17 GuideCane, University of Michigan

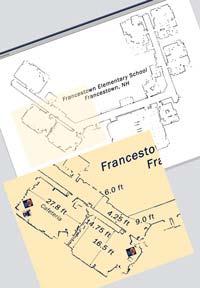
18 LaserPlans Architectural Tool (ActivMedia Robotics)


19 Sojourner, First Robot on Mars The mobile robot Sojourner was used during the Pathfinder mission to explore the mars in summer 997. It was nearly fully teleoperated from earth. However, some on board sensors allowed for obstacle detection. q.nasa.gov/telerob otics_page/telerob otics.shtm






20 NOMAD, Carnegie Mellon / NASA

21 Toy Robot Aibo from Sony Size length about 25 cm Sensors color camera stereo microphone

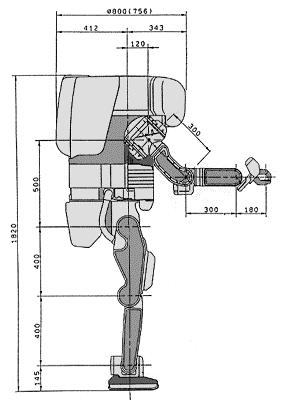
22 The Honda Walking Robot

23 Humanoid Robots (Sony Qrio)
24 General Control Scheme for Mobile Robot Systems Knowledge, Data Base Mission Commands Localization Map Building "Position" Global Map Cognition Path Planning Environment Model Local Map Path Perception Information Extraction Raw data Sensing Path Execution Actuator Commands Acting Motion Control Real World Environment
25 Control Architectures / Strategies Control Loop Two Approaches dynamically changing Classical AI no compact model available many sources of uncertainty o complete modeling o function based o horizontal decomposition Localization Environment Model Local Map Perception "Position" Global Map Real World Environment Cognition Path Motion Control New AI, AL o sparse or no modeling o behavior based o vertical decomposition o bottom up
26 Two Approaches Classical AI (model based navigation) complete modeling function based horizontal decomposition New AI, AL (behavior based navigation) sparse or no modeling behavior based vertical decomposition bottom up Possible Solution
27 Mixed Approach Depicted into the General Control Scheme Localization Environment Model Local Map Perception Position Position Local Map Local Map Real World Environment Perception to Action Obstacle Avoidance Cognition Position Feedback Path Motion Control
28 Environment Representation and Modeling: The Key for Autonomous Navigation Environment Representation Continuous Metric -> x,y,θ Discrete Metric -> metric grid Discrete Topological -> topological grid Environment Modeling Raw sensor data, e.g. laser range data, grayscale images o large volume of data, low distinctiveness o makes use of all acquired information Low level features, e.g. line other geometric features o medium volume of data, average distinctiveness o filters out the useful information, still ambiguities High level features, e.g. doors, a car, the Eiffel tower o low volume of data, high distinctiveness o filters out the useful information, few/no ambiguities, not enough information

29 Environment Representation and Modeling: How we do it! Odometry Modified Environments Feature-based Navigation Elevator door Corridor crossing How to find a treasure not applicable Landing at night expensive, inflexible Eiffel Tower Entrance still a challenge for artificial systems Courtesy K. Arras
30 Environment Representation: The Map Categories Recognizable Locations Topological Maps Courtesy K. Arras Metric Topological Maps Fully Metric Maps (continuous or discrete) y 50 km 200 m 2 km 00 km {W} x
31 Environment Models: Continuous <-> Discrete ; Raw data <-> Features Continuous position in x,y,θ Discrete metric grid topological grid Raw Data as perceived by sensor A feature (or natural landmark) is an environmental structure which is static, always perceptible with the current sensor system and locally unique. Examples geometric elements (lines, walls, column..) a railway station a river the Eiffel Tower a human being fixed stars
32 Human Navigation: Topological with imprecise metric information ~ 400 m ~ 200 m ~ km Courtesy K. Arras ~ 50 m ~ 0 m
33 Methods for Navigation: Approaches with Limitations Incrementally (dead reckoning) Modifying the environments (artificial landmarks / beacons) Inductive or optical tracks (AGV) Courtesy K. Arras Odometric or initial sensors (gyro) not applicable Reflectors or bar codes expensive, inflexible
34 Methods for Localization: The Quantitative Metric Approach. A priori Map: Graph, metric y w y r {W} lw θ r w x r x 3. Matching: Find correspondence of features Courtesy K. Arras 2. Feature Extraction (e.g. line segments) 4. Position Estimation: e.g. Kalman filter, Markov Odometry Observation representation of uncertainties optimal weighting acc. to a priori statistics
 Belief state Courtesy S.")
35 Gaining Information through motion: (Multi-hypotheses tracking) Belief state Courtesy S. Thrun, W. Burgard

 Grid: ~ 400 x 320 = 28 000 points Courtesy S.")
36 Grid-Based Metric Approach Grid Map of the Smithsonian s National Museum of American History in Washington DC. (Courtesy of Wolfram Burger et al.) Grid: ~ 400 x 320 = points Courtesy S. Thrun, W. Burgard

37 Methods for Localization: The Quantitative Topological Approach. A priori Map: Graph locally unique points edges 3. Library of driving behaviors e.g. wall or midline following, blind step, enter door, application specific behaviors Example: Video-based navigation with natural landmarks 2. Method for determining the local uniqueness e.g. striking changes on raw data level or highly distinctive features Courtesy of [Lanser et al. 996]

, partially few vertical")
38 Autonomous Indoor Navigation (Pygmalion EPFL) very robust on-the-fly localization one of the first systems with probabilistic sensor fusion 47 steps,78 meter length, realistic office environment, conducted 6 times > km overall distance partially difficult surfaces (laser), partially few vertical edges (vision)

39 Autonomous Indoor Navigation (Thrun, CMU)
40 Map Building: How to Establish a Map. By Hand 2. Automatically: Map Building The robot learns its environment Motivation: - by hand: hard and costly - dynamically changing environment - different look due to different perception Basic Requirements of a Map: a way to incorporate newly sensed information into the existing world model information and procedures for estimating the robot s position information to do path planning and other navigation task (e.g. obstacle avoidance) predictability Measure of Quality of a map topological correctness metrical correctness But: Most environments are a mixture of predictable and unpredictable features hybrid approach Courtesy K. Arras
41 Map Building: The Problems. Map Maintaining: Keeping track of changes in the environment e.g. disappearing cupboard 2. Representation and Reduction of Uncertainty position of robot -> position of wall Courtesy K. Arras? position of wall -> position of robot - e.g. measure of belief of each environment feature probability densities for feature positions additional exploration strategies
42 Map Building: Exploration and Graph Construction. Exploration 2. Graph Construction explore on stack already examined Courtesy K. Arras Where to put the nodes? Topology-based: at distinctive locations - provides correct topology - must recognize already visited location - backtracking for unexplored openings Metric-based: where features disappear or get visible
43 High-Speed Explotation and Mapping Courtesy of Sebastian Thrun
44 Control of Mobile Robots global Knowledge, Data Base Localization Map Building "Position" Global Map Mission Commands Cognition Path Planning Most functions for save navigation are local not involving localization nor cognition local Perception Environment Model Local Map Information Extraction Raw data Sensing Real World Environment Path Path Execution Actuator Commands Acting Motion Control Localization and global path planning slower update rate, only when needed This approach is pretty similar to what human beings do.
45 Tour-Guide Robot (Nourbakhsh, CMU)

46 Tour-Guide Robot expo.02)
 map (trees) and")

47 Outdoor Mapping (no GPS) map (trees) and path University of Sydney Courtesy of Eduardo Nebot
48 Human-Robot Interaction (Kismet MIT)

49 The Dyson Vacuum Cleaner Robot


 Options:")
50 The Cye Personal Robot Two-wheeled differential drive robot Controlled by remote PC (9.2 kb) Options: vacuum cleaner trailer

51 Cye s Navigation Concept Known Obstacle s Home Base Known Free Space Dange r Zone Unexplored Areas Check-In Point Hot Point
52 Summary This lecture has introduced: Some of the more important issues in autonomous mobile robotics Some of the solutions that have been identified and Some of the huge variety of robots that are running around the world (and indeed other planets). Next lecture we start to look at the details.
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Acknowledgements INTRODUCTION. What is a robot? What is a robot
 Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements. Naturally, all errors introduced are my responsibility. cisc3415-fall2013-ozgelen-lect01 2
 INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Outline of today s lecture. Mobile Robotics Mobile robot classification. Outline of today s lecture. What is a mobile robot? What is a mobile robot?
 Mobile Robotics Mobile robot classification Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany What is a mobile robot? Outline of today s lecture Mobile robot classification Review of research
Mobile Robotics Mobile robot classification Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany What is a mobile robot? Outline of today s lecture Mobile robot classification Review of research
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Outline. DD2426 Robotics and Autonomous Systems Lecture 1: Introduction. Swedish robotics. ABB - Industrial robots
 Outline DD2426 Robotics and Autonomous Systems Lecture 1: Introduction Examples of swedish robotics Some application domains A case study Video from last year Kungl Tekniska Högskolan patric@kth.se October
Outline DD2426 Robotics and Autonomous Systems Lecture 1: Introduction Examples of swedish robotics Some application domains A case study Video from last year Kungl Tekniska Högskolan patric@kth.se October
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Space Robotic Capabilities David Kortenkamp (NASA Johnson Space Center)
") Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA. University of Tsukuba. Tsukuba, Ibaraki, 305 JAPAN
 Long distance outdoor navigation of an autonomous mobile robot by playback of Perceived Route Map Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA Intelligent Robot Laboratory Institute of Information Science
Long distance outdoor navigation of an autonomous mobile robot by playback of Perceived Route Map Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA Intelligent Robot Laboratory Institute of Information Science
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Robot Mapping. Introduction to Robot Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Visual Based Localization for a Legged Robot
 Visual Based Localization for a Legged Robot Francisco Martín, Vicente Matellán, Jose María Cañas, Pablo Barrera Robotic Labs (GSyC), ESCET, Universidad Rey Juan Carlos, C/ Tulipán s/n CP. 28933 Móstoles
Visual Based Localization for a Legged Robot Francisco Martín, Vicente Matellán, Jose María Cañas, Pablo Barrera Robotic Labs (GSyC), ESCET, Universidad Rey Juan Carlos, C/ Tulipán s/n CP. 28933 Móstoles
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Robot Navigation in Centimeter Range Labyrinths
 Robot Navigation in Centimeter Range Labyrinths G. Caprari, K.O. Arras and R. Siegwart Institute of Robotics Systems Swiss Federal Institute of Technology Lausanne (EPFL) CH 1015 Lausanne E-mail: gilles.caprari@epfl.ch
Robot Navigation in Centimeter Range Labyrinths G. Caprari, K.O. Arras and R. Siegwart Institute of Robotics Systems Swiss Federal Institute of Technology Lausanne (EPFL) CH 1015 Lausanne E-mail: gilles.caprari@epfl.ch
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Cooperative Tracking with Mobile Robots and Networked Embedded Sensors
 Institutue for Robotics and Intelligent Systems (IRIS) Technical Report IRIS-01-404 University of Southern California, 2001 Cooperative Tracking with Mobile Robots and Networked Embedded Sensors Boyoon
Institutue for Robotics and Intelligent Systems (IRIS) Technical Report IRIS-01-404 University of Southern California, 2001 Cooperative Tracking with Mobile Robots and Networked Embedded Sensors Boyoon
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Field Robots. Abstract. Introduction. Chuck Thorpe and Hugh Durrant-Whyte
 Field Robots Chuck Thorpe and Hugh Durrant-Whyte Robotics Institute, Carnegie Mellon University, Pittsburgh USA; Australian Centre for Field Robotics, The University of Sydney, Sydney NSW 2006, Australia
Field Robots Chuck Thorpe and Hugh Durrant-Whyte Robotics Institute, Carnegie Mellon University, Pittsburgh USA; Australian Centre for Field Robotics, The University of Sydney, Sydney NSW 2006, Australia
Robotics. Applied artificial intelligence (EDA132) Lecture Elin A. Topp
 Lecture Elin A. Topp") Robotics Applied artificial intelligence (EDA132) Lecture 10 2015-02-20 Elin A. Topp Course book (chapter 25), images & movies from various sources, and original material Images are film characters found
Robotics Applied artificial intelligence (EDA132) Lecture 10 2015-02-20 Elin A. Topp Course book (chapter 25), images & movies from various sources, and original material Images are film characters found
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
UChile Team Research Report 2009
 UChile Team Research Report 2009 Javier Ruiz-del-Solar, Rodrigo Palma-Amestoy, Pablo Guerrero, Román Marchant, Luis Alberto Herrera, David Monasterio Department of Electrical Engineering, Universidad de
UChile Team Research Report 2009 Javier Ruiz-del-Solar, Rodrigo Palma-Amestoy, Pablo Guerrero, Román Marchant, Luis Alberto Herrera, David Monasterio Department of Electrical Engineering, Universidad de
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
RoBotanic: a Robot Guide for Botanical Gardens. Early steps.
 RoBotanic: a Robot Guide for Botanical Gardens. Early steps. Antonio Chella, Irene Macaluso, Daniele Peri, and Lorenzo Riano Department of Computer Engineering (DINFO) University of Palermo, Ed.6 viale
RoBotanic: a Robot Guide for Botanical Gardens. Early steps. Antonio Chella, Irene Macaluso, Daniele Peri, and Lorenzo Riano Department of Computer Engineering (DINFO) University of Palermo, Ed.6 viale
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt.
 Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Cooperative Tracking using Mobile Robots and Environment-Embedded, Networked Sensors
 In the 2001 International Symposium on Computational Intelligence in Robotics and Automation pp. 206-211, Banff, Alberta, Canada, July 29 - August 1, 2001. Cooperative Tracking using Mobile Robots and
In the 2001 International Symposium on Computational Intelligence in Robotics and Automation pp. 206-211, Banff, Alberta, Canada, July 29 - August 1, 2001. Cooperative Tracking using Mobile Robots and
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
POSITIONING AN AUTONOMOUS OFF-ROAD VEHICLE BY USING FUSED DGPS AND INERTIAL NAVIGATION. T. Schönberg, M. Ojala, J. Suomela, A. Torpo, A.
 POSITIONING AN AUTONOMOUS OFF-ROAD VEHICLE BY USING FUSED DGPS AND INERTIAL NAVIGATION T. Schönberg, M. Ojala, J. Suomela, A. Torpo, A. Halme Helsinki University of Technology, Automation Technology Laboratory
POSITIONING AN AUTONOMOUS OFF-ROAD VEHICLE BY USING FUSED DGPS AND INERTIAL NAVIGATION T. Schönberg, M. Ojala, J. Suomela, A. Torpo, A. Halme Helsinki University of Technology, Automation Technology Laboratory
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Simulation of a mobile robot navigation system
 Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
An Agent-Based Architecture for an Adaptive Human-Robot Interface
 An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University