The Future of AI A Robotics Perspective
|
|
|
- Lindsey Sharp
- 5 years ago
- Views:
Transcription
1 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany
2 The Future of AI My Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany
3 Autonomous Systems in AI Agents that perceive their environment and generate actions to achieve their goals sense agent environment act
4 in Robotics Physical agents that perceive their environment and generate actions to achieve their goals model sense environment act












5 Where are We?


6 Humanoids Overcoming the uncanny valley [Courtesy by Hiroshi Ishiguro]
7 RoboCup [Courtesy by Sven Behnke]

8 The DARPA Grand Challenge [Courtesy by Sebastian Thrun]
9 Tasks to be Solved by Robots Collision Avoidance Mapping Navigation Localization Path planning Perception Acting (under uncertainty) Interaction Manipulation and grasping Planning Learning Cooperation...
10 AI Disciplines Involved Machine learning Planning Distributed AI Probabilistic AI...
11 Problems Argued to be Solved in Robotics Localization Path planning Mapping SLAM

12 Path Planning [Courtesy by Dave Ferguson]
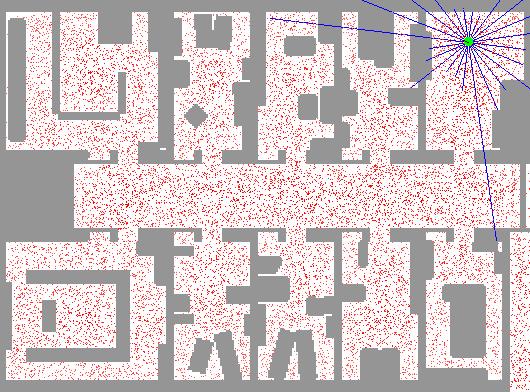
13 Localization
14 SLAM 14
15 SLAM 15
16 What are We Good At? Mechanical design Navigation Planning Multi-agent systems Learning
17 Limitations and Challenges Dynamic and changing environments Large-scale environments Object recognition Recognition of situations Representations Planning complex behaviors

18 Large-Scale Indoor/Outdoor Map size: 299 by 147m Cell resolution: 10cm Number of data points: 45,000,000

19 3D Map Example
20 Increasing Size

21 Increasing Complexity
22 Consequences Many existing algorithms are too complex to be applicable. Storage capacity eventually too small. We lack representations that cover all relevant aspects and can be efficiently updated upon sensory input
23 Reducing the Size of the Robot Minimization of energy consumption Low computational power Limited perception
 Battery Altitude sensor [Courtesy by mufly")
24 Micro Arial Vehicles Characteristics 80g 120mm span width 4mins flight time BT communication RC commands Up to 2000 MMACs Carbon cage Motor Stabilizer Propeller Swashplate Linear actuator Features Attitude control Altitude control Forward flight Indoor operation Manually launched Motor MTx IMU Peripheral PCBs holder Main board (PCB) Battery Altitude sensor [Courtesy by mufly Project]

25 Prototype of the mufly Project





26 The Blimp System Intel XScale PXA MHz, 32MB flash memory with a fullfledged Linux system Interface Card providing several communication interfaces like UART, SPI, I 2 C, GPIO, and USB USB camera Ultrasonic senor Battery, 3.7V, 1500mAh Total weight 180 grams

27 How to Scale Computing Intensive Algorithms?
28 Challenges Large-scale environments are too demanding with respect to storage and computational requirements Small-scale or low-cost robots require to down-scale computing-intensive algorithms Representations that cover all relevant aspects and can efficiently be updated

29 Robotics Tomorrow?
30



31 Service Robot Projects
32 Why do We Have this Gap? Why is there currently no real service robot that assists us in our everyday life? Let us assume we get a huge grant for building one, what are the technical challenges that we will be faced with?

33 What Would we Need to Build a Service Robot?
34 Requirements Complex representations and planning Object recognition Vision
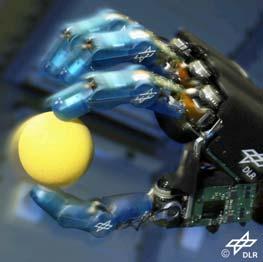
35 Object Recognition Object recognition is a fundamental requirement for service robots. Current technology is not robust enough to flexibly handle sufficiently many objects. Object identification Learning the geometry and object properties Learning how to handle the objects

36 Object and Scene Recognition [Courtesy by D. Hoiem, A.A. Efros, and M. Hebert]

37 Moving Objects Around [Courtesy by Stilman et al.]

38 Moving Objects Around [Courtesy by Stilman et al.]

39 Moving Objects Around [Courtesy by Stilman et al.]

40 To Go or Not To Go
41 To Go or Not To Go

42 Navigation in Environments with Deformable Objects
43 Knowledge Representation and Planning Uncertainty? Time? Optimality? Ambiguities? [Giacomo et al.]

44 Spatial Reasoning Take the second door on the left. Take the orange juice out of the fridge and put it on the kitchen table. Lay a dinner table for four people. Go straight for.1 miles, then take a right.
45 Conclusions Robotics is faced with many (AI) problems that are individually hard. Vision Object recognition Representation Planning and reasoning Scaling problems Perception and state estimation One key challenge for the future lies in the development of new robust solutions to these problems and their successful integration

46 Don t Panic! AI will provide key technologies!
47 The Future Advances will be due to advances in the individual sub-disciplines or areas increase of computing power integration The improvements in the performance of the robots will directly illustrate the advance. Robotics is an ideal benchmark for AI
48 References Giuseppe De Giacomo, Yves Lespérance, and Hector Levesque. ConGolog, a concurrent programming language based on the situation calculus. Artificial Intelligence, 121(1-2): , Derek Hoiem, Alexei A. Efros, Martial Hebert. Putting Objects in Perspective. In CVPR J.J. Kuffner, K. Nishiwaki, S. Kagami, M. Inaba, and H. Inoue. Motion planning for humanoid robots under obstacle and dynamic balance constraints. In Proc. IEEE Int'l Conf. on Robotics and Automation (ICRA'2001),
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots
 A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
NimbRo 2005 Team Description
 In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Physics-Based Manipulation in Human Environments
 Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Mobile Robots Exploration and Mapping in 2D
 ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Graphical Simulation and High-Level Control of Humanoid Robots
 In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
High Speed vslam Using System-on-Chip Based Vision. Jörgen Lidholm Mälardalen University Västerås, Sweden
 High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EROS TEAM. Team Description for Humanoid Kidsize League of Robocup2013
 EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
The Robotic Busboy: Steps Towards Developing a Mobile Robotic Home Assistant
 The Robotic Busboy: Steps Towards Developing a Mobile Robotic Home Assistant Siddhartha SRINIVASA a, Dave FERGUSON a, Mike VANDE WEGHE b, Rosen DIANKOV b, Dmitry BERENSON b, Casey HELFRICH a, and Hauke
The Robotic Busboy: Steps Towards Developing a Mobile Robotic Home Assistant Siddhartha SRINIVASA a, Dave FERGUSON a, Mike VANDE WEGHE b, Rosen DIANKOV b, Dmitry BERENSON b, Casey HELFRICH a, and Hauke
DelFly Versions. See Figs. A.1, A.2, A.3, A.4 and A.5.
 DelFly Versions A See Figs. A.1, A.2, A.3, A.4 and A.5. Springer Science+Bussiness Media Dordrecht 2016 G.C.H.E. de Croon et al., The DelFly, DOI 10.1007/978-94-017-9208-0 209 210 Appendix A: DelFly Versions
DelFly Versions A See Figs. A.1, A.2, A.3, A.4 and A.5. Springer Science+Bussiness Media Dordrecht 2016 G.C.H.E. de Croon et al., The DelFly, DOI 10.1007/978-94-017-9208-0 209 210 Appendix A: DelFly Versions
DESIGN CONSTRAINTS ANALYSIS
 TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Simulation of a mobile robot navigation system
 Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Human-robot relation. Human-robot relation
 Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting
 An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
NimbRo KidSize 2006 Team Description
 NimbRo KidSize 2006 Team Description Sven Behnke, Michael Schreiber, Jörg Stückler, Hauke Strasdat, and Maren Bennewitz Albert-Ludwigs-University of Freiburg, Computer Science Institute Georges-Koehler-Allee
NimbRo KidSize 2006 Team Description Sven Behnke, Michael Schreiber, Jörg Stückler, Hauke Strasdat, and Maren Bennewitz Albert-Ludwigs-University of Freiburg, Computer Science Institute Georges-Koehler-Allee
Benchmarking Intelligent Service Robots through Scientific Competitions. Luca Iocchi. Sapienza University of Rome, Italy
 RoboCup@Home Benchmarking Intelligent Service Robots through Scientific Competitions Luca Iocchi Sapienza University of Rome, Italy Motivation Development of Domestic Service Robots Complex Integrated
RoboCup@Home Benchmarking Intelligent Service Robots through Scientific Competitions Luca Iocchi Sapienza University of Rome, Italy Motivation Development of Domestic Service Robots Complex Integrated
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
Team Description
 NimbRo@Home 2014 Team Description Max Schwarz, Jörg Stückler, David Droeschel, Kathrin Gräve, Dirk Holz, Michael Schreiber, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science
NimbRo@Home 2014 Team Description Max Schwarz, Jörg Stückler, David Droeschel, Kathrin Gräve, Dirk Holz, Michael Schreiber, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4
 Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4 B.Tech., Student, Dept. Of EEE, Pragati Engineering College,Surampalem,
Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4 B.Tech., Student, Dept. Of EEE, Pragati Engineering College,Surampalem,
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Team Description Paper
 Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Cognitive robotics using vision and mapping systems with Soar
 Cognitive robotics using vision and mapping systems with Soar Lyle N. Long, Scott D. Hanford, and Oranuj Janrathitikarn The Pennsylvania State University, University Park, PA USA 16802 ABSTRACT The Cognitive
Cognitive robotics using vision and mapping systems with Soar Lyle N. Long, Scott D. Hanford, and Oranuj Janrathitikarn The Pennsylvania State University, University Park, PA USA 16802 ABSTRACT The Cognitive
CS686: Robot Motion Planning and Applications
 CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize)
 and Darmstadt Dribblers (TeenSize)") Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft
 Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
IEEE-CYBER 2018 Conference Program
 IEEE-CYBER 2018 Conference Program July 19 (Thursday) 14:00-17:40 Workshop on Advanced Theory and Technologies in Intelligent Automation (The Residence 1) Speakers: Prof. Jianru Xue, Prof. Hong Chen, Prof.
IEEE-CYBER 2018 Conference Program July 19 (Thursday) 14:00-17:40 Workshop on Advanced Theory and Technologies in Intelligent Automation (The Residence 1) Speakers: Prof. Jianru Xue, Prof. Hong Chen, Prof.
Intuitive Vision Robot Kit For Efficient Education
 Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Senior Design I. Fast Acquisition and Real-time Tracking Vehicle. University of Central Florida
 Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Robot Mapping. Introduction to Robot Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Design of an office guide robot for social interaction studies
 Design of an office guide robot for social interaction studies Elena Pacchierotti, Henrik I. Christensen & Patric Jensfelt Centre for Autonomous Systems Royal Institute of Technology, Stockholm, Sweden
Design of an office guide robot for social interaction studies Elena Pacchierotti, Henrik I. Christensen & Patric Jensfelt Centre for Autonomous Systems Royal Institute of Technology, Stockholm, Sweden
Learning Probabilistic Models for Mobile Manipulation Robots
 Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence Learning Probabilistic Models for Mobile Manipulation Robots Jürgen Sturm and Wolfram Burgard University of Freiburg
Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence Learning Probabilistic Models for Mobile Manipulation Robots Jürgen Sturm and Wolfram Burgard University of Freiburg
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
CMDragons 2009 Team Description
 CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
Limits of a Distributed Intelligent Networked Device in the Intelligence Space. 1 Brief History of the Intelligent Space
 Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt
 Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Major Project SSAD. Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga ( ) Aman Saxena ( )
 Aman Saxena ( )") Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia
 Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Designing an Embedded System for Autonomous Building Map Exploration Robot
 Designing an Embedded System for Autonomous Building Map Exploration Robot V. Ramya Assist. Prof, Dept of CSE Annamalai University Annamalai Nagar T. Akilan Dept. of CSE Annamalai University Annamalai
Designing an Embedded System for Autonomous Building Map Exploration Robot V. Ramya Assist. Prof, Dept of CSE Annamalai University Annamalai Nagar T. Akilan Dept. of CSE Annamalai University Annamalai
Introduction to Robotics
 - Lecture 13 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems July
- Lecture 13 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems July
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?