MTRX 4700 : Experimental Robotics
|
|
|
- Paula Henderson
- 6 years ago
- Views:
Transcription
1 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1
2 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic systems for practical applications. Slide 2
3 Administrative Details Lecturers : Stefan Williams, Robert Fitch Lecture Time : Tuesdays 9-11 Tutorials : Fridays, 9-12 Contact Details : stefanw@acfr.usyd.edu.au Phone : In person : Room 206, ACFR building, dial x18152 from front door. Don t just turn up and expect to be seen. Make an appointment first, preferably by . Slide 3
4 Administrative Details Details on Follow links to Teaching/Undergraduate/Mtrx 4700 Assignments, lectures and supplementary material will be posted Alternatively, we can set up a site on WebCT. Any preferences? Slide 4
5 Recommended Texts Manipulator Kinematics and Dynamics John J. Craig, to Robotics: Mechanics and Control, 3rd Edition, Prentice-Hall, 2003 Lorenzo Sciavicco, Bruno Siciliano, Modelling and Control of Robot Manipulators (Advanced Textbooks in Control and Signal Processing), Springer 2000 Mark W. Spong, M. Vidyasagar, Robot Dynamics and Control, Wiley, 1989 Computer Vision Ballard and Brown, Computer Vision, Prentice Hall, 1982 David A. Forsyth and Jean Ponce, Computer Vision -- A Modern Approach, Prentice Hall, 2002 Machine Learning Tom Mitchell, Machine Learning, McGraw-Hill, 1997 Stuart J. Russell and Peter Norvig, Artificial Intelligence, A Modern Approach, 2nd Edition, Prentice Hall, 2002 Mobile Robotics Sebastian Thrun, Dieter Fox and Wolfram Burgard, Probabilistic Robotics, The MIT Press, 2005 Greg Dudek and Michael Jenkin, Computational Principles of Mobile Robotics, Cambridge University Press, 2000 Roland Siegwart and Illah R. Nourbakhsh, to Autonomous Mobile Robots (Intelligent Robotics and Autonomous Agents), The MIT Press, 2004 Slide 5
6 Course Outline Week Date Content Labs Due Dates 1 5 Mar, history & philosophy of robotics 2 12 Mar Robot kinematics & dynamics Kinematics/Dynamics Lab 3 19 Mar Sensors, measurements and perception 4 26 Mar Robot vision and vision processing. No Tute (Good Friday) Kinematics Lab 2 Apr BREAK 5 9 Apr Localization and navigation Sensing with lasers 6 16 Apr Estimation and Data Fusion Sensing with vision 7 23 Apr Extra tutorial session (sensing) Robot Navigation Sensing Lab 8 30 Apr Obstacle avoidance and path planning Robot Navigation 9 7 May Extra tutorial session (nav demo) Major project Navigation Lab May Robotic architectures, multiple robot systems May Robot learning May Case Study 13 4 June Extra tutorial session (Major Project) Major Project 14 Spare Slide 6
7 Assessment Introductory Labs (30%) Manipulator Lab: Due Week 4 (10%) Pioneer Lab: Due Week 6 (10%) Navigation Lab: Due Week 9 (10%) Major Project Presentation and Report (40%) Exam (30%) Slide 7
8 Learning Outcomes Following completion of this UoS students will: Be familiar with sensor technologies relevant to robotic systems Understand conventions used in robot kinematics and dynamics Understand the dynamics of mobile robotic systems and how they are modelled Have implemented navigation, sensing and control algorithms on a practical robotic system Apply a systematic approach to the design process for robotic systems Understand the practical application of robotic systems in applications such as manufacturing, automobile systems and assembly systems Develop the capacity to think creatively and independently about new design problems Undertake independent research and analysis and to think creatively about engineering problems Slide 8
9 What is a Robot? Robot (a Slavic word for worker) was first introduced in 1921 in a play by the Czech playwright, Karel Čapek. A traditional definition of a robot is a programmable multi-function manipulator designed to move material, parts, or specialized devices through variable programmed motions for the performance of a variety of tasks. Slide 9
10 What is a Robot? A robot is a machine that can help us perform a job They are often stronger than people Some are designed to go where we can t go They perform jobs that we can t Others undertake tasks we are not very good at Slide 10
11 What is a Robot? Robots help us to Assemble cars and other components Dispense medicines and other chemical agents Explore new places Perform dangerous jobs like cleaning up nuclear power plants, mine fields and explosives Slide 11
12 You might recognize these robots Slide 12

13 Or These Slide 13 Slide 13









14 What about these robots? Slide 14
15 What is a Robot? A robot system generally consists of 3 subsystems: Motion, Sensing and Control. The motion subsystem includes mechanisms that function like human arms. The sensing subsystem uses various sensors to gather information about the robot itself and the environment. The control subsystem commands the motion to achieve a given task using the recognition information. Slide 15
16 Robot Components The components of a robotic system can often be broken down into a hierarchy Sensing and interfacing to hardware is done at a low level and demands a high degree of responsiveness Estimation and control rely on interfaces to the mechanism Planning of paths and reasoning can be done at lower rates but is often more complex Complexity Pose Estimate Pose Estimation Sensing Goals Planning Pose Estimate Hardware Interface Desired Poses Controller Commands Responsiveness Slide 16
17 Robot Components You may recognize the diagram recast in a traditional control layout There are effectively two control loops here The inner loop achieves particular poses (note: there is often a rate controller in addition to the pose controller shown here) The outer loop is concerned with trajectory control Goals Planning Pose Error Controller Commands Pose Estimate Pose Estimate Pose Estimation Sensing Hardware Interface Slide 17
18 What does a robot need? A robotic system requires one or more of the following elements Mechanics (a frame to hold everything together) Actuation (something to move it) Energy (something to give it power) Sensing (something with which to observe) Directions (a description of how to do its job) Slide 18


19 Mechanical Mechanical requirements are also very application dependent The design of a robotic system will largely be dictated by the task it will perform but may include Chassis Propulsion Suspension Locomotion Slide 19
20 Actuators Actuators provide the motive power for the system Actuation power is usually provided by the energy system Careful consideration to the appropriate actuation will depend on the system requirements Examples include Electric motors Chemical engines Shape memory alloy Hydraulics Pneumatics Slide 20



21 Humanoids Slide 21

22 Humanoids Honda Asimo Honda secretly began developing a Humanoid program to encourage innovation in its engineers The requirement for high power density in small packages provided technical challenges Slide 22

23 Honda Asimov Humanoid Slide 23 Slide 23

24 Humanoids - Sony Slide 24


25 Energy Most robotic systems require some form of energy Sources depend largely on the application but may include Electric (AC/DC) Batteries Solar Diesel and gas Chemical Slide 25



26 Sensing - Vision Sensors measure relevant aspects of the world and convert them into signals to be processed by the system Once again, sensing depends on the application but may include Proprioceptive sensors (encoders, resolvers, tachometers, inertial, etc) External sensors (compass, GPS, inclinometer, etc) Perceptive sensors (vision, sonar, laser, force and torque, proximity, etc.) Slide 26



27 Edges, Segments, Colour, Texture Slide 27 Slide 27


28 3D Stereo Vision Slide 28 Slide 28

29 Perception: Touch Slide 29 Slide 29

30 Other Sensors: Laser Slide 30 Slide 30

31 Environment Understanding Slide 31 Slide 31


32 Control Control systems are used to enable a robot to perform its allocated task These days many controllers are implemented as digital systems, although analogue systems can often be used Control systems may include Velocity control Position control Trajectory control Environmental control get destination! while not at destination!!sample sensors!!calculate movement!!send commands! end!! Slide 32

33 Controlling a Robot Slide 33 Slide 33

34 Controlling Many Robots Slide 34 Slide 34

35 Control: Search and Exploration Slide 35 Slide 35


36 Control: Sensing and Planning Slide 36 Slide 36

37 Control: Making Iced Tea Slide 37 Slide 37


38 Throwing and Catching Slide 38 Slide 38


39 Learning to Walk and Play Slide 39




40 Big Dog: Walking by Balancing Slide 40 Slide 40
41 Entertainment Slide 41


42 Androids Slide 42 Slide 42


43 Space Robots NASA has been using robotic systems to explore Mars Many satellites can be considered robots Voyager recently became the first manmade object to leave the solar system Slide 43

44 Space Robots Spirit Opportunity Slide 44

45 Transport CMU Navlab Navlab is an on-going program that investigates the application of robotic technologies in the transport arena One of the most ambitious demonstrations was entitled No Hands Across America in which a robotic vehicle drove from Pittsburgh to San Diego with little human intervention Slide 45

46 DARPA Grand Challenge DARPA Grand Challenge is a field test intended to accelerate research and development in autonomous ground vehicles An autonomous ground vehicle to finish designated route most quickly within 10 hours will receive $2 million. Route will be no more than 175 miles over desert terrain featuring natural and man-made obstacles. Exact route will not be revealed until two hours before event Slide 46
47 DARPA Urban Grand Challenge Slide 47

48 Automated Container Handling Relatively Simple Problem: A structured environment Well defined task Well defined pay-off Research Challenges: Control a large, fast platform Guarantee performance Ensure Safety Objectives: Best manned performance 24/7 operation Safe, low-maintenance Innovations: Navigation Integrity Control Performance Multi-vehicle optimisation Slide 48



49 Robot Mining (Western Australia) Slide 49 Slide 49


50 Multi-UAV Data Fusion ANSER Project Research: Data Fusion Information Networks Time-Critical Data Demonstration: Ground Picture Compilation Multi-Platform Multi-Sensor Network Centric Slide 50

51 ANSER Flight Trials Outcomes World-First Cooperative UAV demonstrations Shows fully autonomous network-centric operations Received BAE Systems Chairman Gold Award Follow-on Programs: BAE Systems UK MOD US Air Force and Navy Slide 51

52 Land Vehicle Systems Research Long term, autonomous navigation in unstructured environments Perception Cooperative data fusion and control Applications Defence Agriculture Mining Firefighting Slide 52

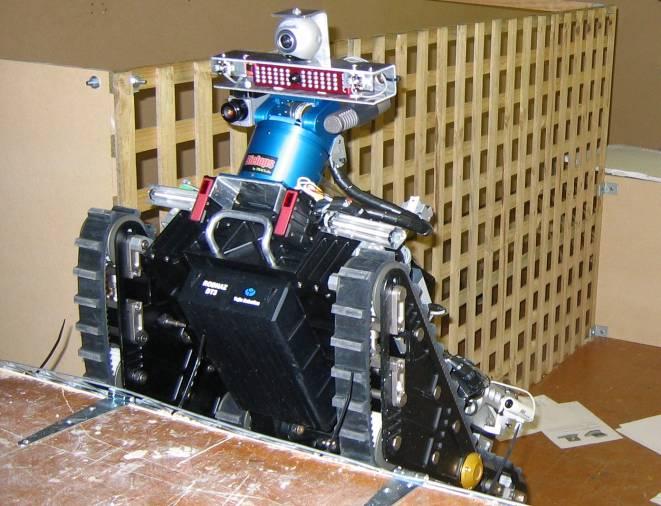
53 Robot Sniper Training Robots Slide 53 Slide 53

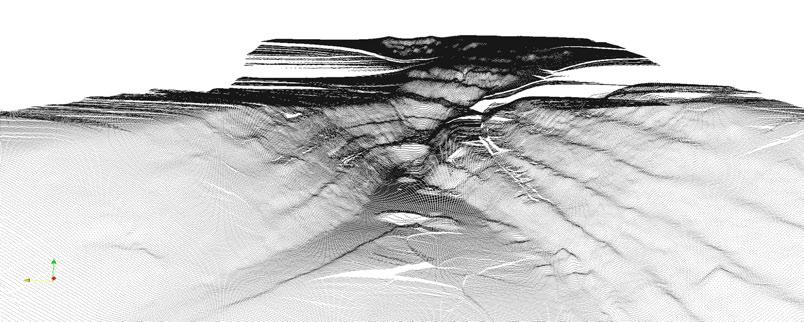
54 Unmanned Underwater Vehicles (UUVs) Constraints No GPS Low cost IMU Unstructured Terrain Research Challenges Sensing and Perception Localisation and Mapping Adaptive Control Slide 54
55 Terrain Models Slide 55
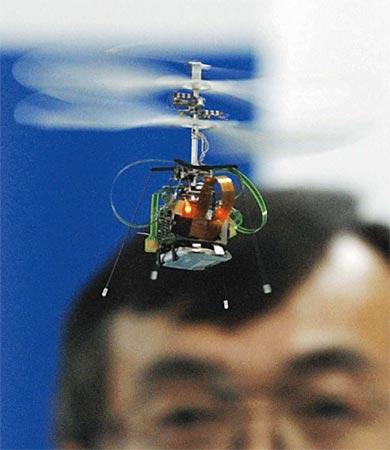

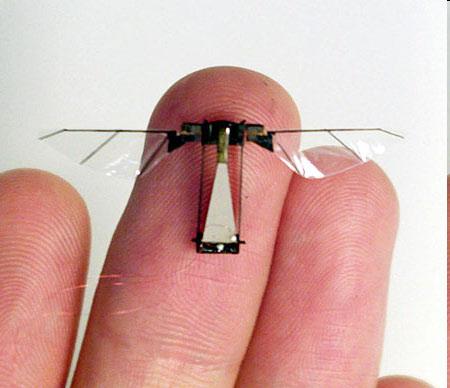



56 Biomimetic Robots Slide 56 Slide 56







57 Many More Robot Applications Slide 57 Slide 57

58 Maybe this isn t so far away Slide 58
59 Conclusions Robotic systems are playing an increasingly important, and diverse, role in our society The study of robotics involves an integration of a number of different areas including hardware, electronic and software Slide 59
60 Further Reading Slide 60
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
ENME 489L: Biologically Inspired Robotics
 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION
 ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
Safe Human-Robot Co-Existence
 Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Multi Robot Navigation and Mapping for Combat Environment
 Multi Robot Navigation and Mapping for Combat Environment Senior Project Proposal By: Nick Halabi & Scott Tipton Project Advisor: Dr. Aleksander Malinowski Date: December 10, 2009 Project Summary The Multi
Multi Robot Navigation and Mapping for Combat Environment Senior Project Proposal By: Nick Halabi & Scott Tipton Project Advisor: Dr. Aleksander Malinowski Date: December 10, 2009 Project Summary The Multi
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem
 Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem ELAD16 Associate Professor (Docent) KARLSTAD UNIVERSITY Faculty of Technology and Science Department of Physics and
Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem ELAD16 Associate Professor (Docent) KARLSTAD UNIVERSITY Faculty of Technology and Science Department of Physics and
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
COURSE MODULES LEVEL 3.1 & 3.2
 COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
Welcome to EGN-1935: Electrical & Computer Engineering (Ad)Ventures
Ventures") : ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
: ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
Intelligent Robotics Assignments
 Intelligent Robotics Assignments Luís Paulo Reis Assignment#1 Oral Presentation about an Intelligent Robotic New Trend Groups: 1 to 3 students 8 15 Minutes Oral Presentation 15 20 Slides (including appropriate
Intelligent Robotics Assignments Luís Paulo Reis Assignment#1 Oral Presentation about an Intelligent Robotic New Trend Groups: 1 to 3 students 8 15 Minutes Oral Presentation 15 20 Slides (including appropriate
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Field Robots. Abstract. Introduction. Chuck Thorpe and Hugh Durrant-Whyte
 Field Robots Chuck Thorpe and Hugh Durrant-Whyte Robotics Institute, Carnegie Mellon University, Pittsburgh USA; Australian Centre for Field Robotics, The University of Sydney, Sydney NSW 2006, Australia
Field Robots Chuck Thorpe and Hugh Durrant-Whyte Robotics Institute, Carnegie Mellon University, Pittsburgh USA; Australian Centre for Field Robotics, The University of Sydney, Sydney NSW 2006, Australia
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
A Quick history. Ioannis Rekleitis
 A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Acknowledgements INTRODUCTION. What is a robot? What is a robot
 Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements. Naturally, all errors introduced are my responsibility. cisc3415-fall2013-ozgelen-lect01 2
 INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl