JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (
|
|
|
- Edwina Waters
- 6 years ago
- Views:
Transcription

1 Introduction to Robotics Materials Provided by Team

2 Definition Types Uses History Key components Applications Future MPCRL Outline
3 Robot Defined Word robot was coined by a Czech novelist Karel Capek in a 1920 play titled Rassum s Universal Robots (RUR) Robot in Czech is a word for worker or servant zdefinition of robot: Karel Capek Any machine made by by one our members: Robot Institute of America - A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools or specialized devices through variable programmed motions for the performance of a variety of tasks: Robot Institute of America, 1979


4 Types of Robots: I Manipulator


5 Types of Robots: II Legged Robot Wheeled Robot


6 Types of Robots: III Autonomous Underwater Vehicle Unmanned Aerial Vehicle

7 Robot Uses: I Decontaminating Robot Cleaning the main circulating pump housing in the nuclear power plant Jobs that are dangerous for humans

8 Welding Robot Robot Uses: II Repetitive jobs that are boring, stressful, or laborintensive for humans

9 The SCRUBMATE Robot Robot Uses: III Menial tasks that human don t want to do

10 Laws of Robotics Asimov proposed three Laws of Robotics and later added the zeroth law Law 0: A robot may not injure humanity or through inaction, allow humanity to come to harm Law 1: A robot may not injure a human being or through inaction, allow a human being to come to harm, unless this would violate a higher order law Law 2: A robot must obey orders given to it by human beings, except where such orders would conflict with a higher order law Law 3: A robot must protect its own existence as long as such protection does not conflict with a higher order law
.")
11 History of Robotics: I The first industrial robot: UNIMATE 1954: The first programmable robot is designed by George Devol, who coins the term Universal Automation. He later shortens this to Unimation, which becomes the name of the first robot company (1962). UNIMATE originally automated the manufacture of TV picture tubes

12 History of Robotics: II 1978: The Puma (Programmable Universal Machine for Assembly) robot is developed by Unimation with a General Motors design support PUMA 560 Manipulator



13 History of Robotics: III 1980s: The robot industry enters a phase of rapid growth. Many institutions introduce programs and courses in robotics. Robotics courses are spread across mechanical engineering, electrical engineering, and computer science departments. Adept s SCARA robots Cognex In-Sight Robot Barrett Technology Manipulator

14 History of Robotics: IV 1995-present: Emerging applications in small robotics and mobile robots drive a second growth of start-up companies and research 2003: NASA s Mars Exploration Rovers will launch toward Mars in search of answers about the history of water on Mars
15 Knowledgebase for Robotics Typical knowledgebase for the design and operation of robotics systems Dynamic system modeling and analysis Feedback control Sensors and signal conditioning Actuators (muscles) and power electronics Hardware/computer interfacing Computer programming Disciplines: mathematics, physics, biology, mechanical engineering, electrical engineering, computer engineering, and computer science
16 Key Components Sensors Actuators User interface Power conversion unit Controller Manipulat or linkage Base

17 Robot Base: Fixed v/s Mobile Robotic manipulators used in manufacturing are examples of fixed robots. They can not move their base away from the work being done. Mobile bases are typically platforms with wheels or tracks attached. Instead of wheels or tracks, some robots employ legs in order to move about.

18 Robot Mechanism Mechanical Elements
 Robots often need information that is beyond 5 human senses (e.")
 Accelerometer Using Piezoelectric Effect Flexiforce Sensor")
19 Sensors Human senses: sight, sound, touch, taste, and smell provide us vital information to function and survive Robot sensors: measure robot configuration/condition and its environment and send such information to robot controller as electronic signals (e.g., arm position, presence of toxic gas) Robots often need information that is beyond 5 human senses (e.g., ability to: see in the dark, detect tiny amounts of invisible radiation, measure movement that is too small or fast for the human eye to see) Accelerometer Using Piezoelectric Effect Flexiforce Sensor


20 Vision Sensors Vision Sensor: e.g., to pick bins, perform inspection, etc. Part-Picking: Robot can handle work pieces that are randomly piled by using 3-D vision sensor. Since alignment operation, a special parts feeder, and an alignment pallete are not required, an automatic system can be constructed at low cost. In-Sight Vision Sensors

21 Force Sensors Force Sensor: e.g., parts fitting and insertion, force feedback in robotic surgery Parts fitting and insertion: Robots can do precise fitting and insertion of machine parts by using force sensor. A robot can insert parts that have the phases after matching their phases in addition to simply inserting them. It can automate highskill jobs.



22 Infrared Ranging Sensor Proximity Sensors Example KOALA ROBOT 6 ultrasonic sonar transducers to explore wide, open areas Obstacle detection over a wide range from 15cm to 3m 16 built-in infrared proximity sensors (range 5-20cm) Infrared sensors act as a virtual bumper and allow for negotiating tight spaces



23 Tilt sensors: e.g., to balance a robot Tilt Sensor Tilt Sensors Example Planar Bipedal Robot

24 Actuators/Muscles: I Common robotic actuators utilize combinations of different electro-mechanical devices Synchronous motor Stepper motor AC servo motor Brushless DC servo motor Brushed DC servo motor
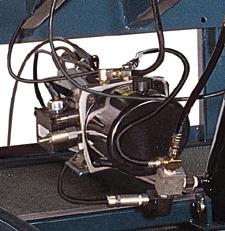

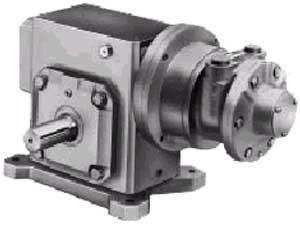


25 Actuators/Muscles: II Pneumatic Cylinder Hydraulic Motor Stepper Motor DC Motor Pneumatic Motor Muscle Wire Servo Motor
26 Controller z Provide necessary intelligence to control the manipulator/mobile robot z Process the sensory information and compute the control commands for the actuators to carry out specified tasks

27 Storage Hardware Storage devices: e.g., memory to store the control program and the state of the robot system obtained from the sensors

28 Computation Hardware Computational engine that computes the control commands RoboBoard Robotics Controller BASIC Stamp 2 Module
 Analog to Digital Converter Operational Amplifiers LM358 LM358 LM1458 dual operational")
29 Interface Hardware Interface units: Hardware to interface digital controller with the external world (sensors and actuators) Analog to Digital Converter Operational Amplifiers LM358 LM358 LM1458 dual operational amplifier
30 Robots in Industry Agriculture Automobile Construction Entertainment Health care: hospitals, patient-care, surgery, research, etc. Laboratories: science, engineering, etc. Law enforcement: surveillance, patrol, etc. Manufacturing Military: demining, surveillance, attack, etc. Mining, excavation, and exploration Transportation: air, ground, rail, space, etc. Utilities: gas, water, and electric Warehouses


31 Industrial Applications of Robots Material handling Material transfer Machine loading and/or unloading Spot welding Continuous arc welding Spray coating Assembly Inspection Material Handling Manipulator Spot Welding Manipulator Assembly Manipulator


32 Robots in Space NASA Space Station


33 Robots in Hazardous Environments TROV in Antarctica operating under water HAZBOT operating in atmospheres containing combustible gases


34 Robotic assistant for micro surgery Medical Robots





35 SPLIT STRIKE: Deployed from a sub s hull, Manta could dispatch tiny mine-seeking AUVs or engage in more explosive combat. Robots in Military PREDATOR GLOBAL HAWK ISTAR GOLDENEYE
36 Robots at Home Sony SDR-3X Entertainment Robot Sony Aido


37 Future of Robots: I Artificial Intelligence Cog Kismet


38 Robot Work Crews Future of Robots: II Autonomy Garbage Collection Cart

39 Future of Robots: III Humanoids HONDA Humanoid Robot

40 MPCRL: Remote Robot Arm Manipulation


41 MPCRL: Smart Irrigation System

42 MPCRL: RoboDry
43 MPCRL: 4-Legged Hexapod

44 MPCRL: Hexapod for Disaster Recovery

45 MPCRL: Hexapod for Disaster Recovery

46 MPCRL: Robotic Vacuum Cleaner

47 MPCRL: Automated Distinguisher

48 MPCRL: Automated Distinguisher
49 To Explore Further Visit:
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Lecture 10. Thermal Sensors
 Lecture 10 Thermal Sensors DS1620 Digital thermometer Provides 9-bit temperature readings Temperature range from -55 o C to 125 o C Acts as a thermostat Detail Description DS1620 with BS2 Programming for
Lecture 10 Thermal Sensors DS1620 Digital thermometer Provides 9-bit temperature readings Temperature range from -55 o C to 125 o C Acts as a thermostat Detail Description DS1620 with BS2 Programming for
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS & EMBEDDED SYSTEMS
 ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
A Brief Survey on Robotics
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
ENME 489L: Biologically Inspired Robotics
 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 4: Applications of Robotics Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 4: Applications of Robotics Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
National Aeronautics and Space Administration
 National Aeronautics and Space Administration 2013 Spinoff (spin ôf ) -noun. 1. A commercialized product incorporating NASA technology or expertise that benefits the public. These include products or processes
National Aeronautics and Space Administration 2013 Spinoff (spin ôf ) -noun. 1. A commercialized product incorporating NASA technology or expertise that benefits the public. These include products or processes
Computer-Assisted Consumer Electronics in Manufacturing and Service Industries: Present Status and Future Challenges INTRODUCTION
 International Journal of Research Studies in Computer Science and Engineering (IJRSCSE) Volume 3, Issue 2, 2016, PP 15-20 ISSN 2349-4840 (Print) & ISSN 2349-4859 (Online) http://dx.doi.org/10.20431/2349-4859.0302003
International Journal of Research Studies in Computer Science and Engineering (IJRSCSE) Volume 3, Issue 2, 2016, PP 15-20 ISSN 2349-4840 (Print) & ISSN 2349-4859 (Online) http://dx.doi.org/10.20431/2349-4859.0302003
Teleoperation. History and applications
 Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
IMPROVEMENT OF PRODUCTIVITY IN AUTOMOTIVE PAINT SHOP USING ROBOTIC ARM: A CASE STUDY
 IMPROVEMENT OF PRODUCTIVITY IN AUTOMOTIVE PAINT SHOP USING ROBOTIC ARM: A CASE STUDY Baldev Singh Rana 1,Nisha Rana 2 Department of Mechanical Engineering, A.G.U Shimla Himachal Pradesh 171009 Department
IMPROVEMENT OF PRODUCTIVITY IN AUTOMOTIVE PAINT SHOP USING ROBOTIC ARM: A CASE STUDY Baldev Singh Rana 1,Nisha Rana 2 Department of Mechanical Engineering, A.G.U Shimla Himachal Pradesh 171009 Department
Robotics: Robot. Robotics
 Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
An Introduction to Robotics. Dr. Bob Williams, Mechanical Engineering, Ohio University. Table of Contents
 An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.
 A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck.") WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck. What is a Robot The difference between a robot and a manipulator Run by
WHAT IS A ROBOT? Fig. 1.1 (a) A Kuhnezug truck-mounted crane. Fig. 1.1 (b) Fanuc S-500 robots performing seam-sealing on a truck. What is a Robot The difference between a robot and a manipulator Run by
Robotics Intelligent connection of the perception to action. Applications
 Robotics Intelligent connection of the perception to action Applications Applications Automotive industry Assembly Medical laboratories Medecine Nuclear energy Agriculture Spatial exploration Underwater
Robotics Intelligent connection of the perception to action Applications Applications Automotive industry Assembly Medical laboratories Medecine Nuclear energy Agriculture Spatial exploration Underwater
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
Foreword Editorial Contents Executive Summary World Robotics 2017 Service Robots... 12
 Contents 7 Contents Foreword... 3 Editorial... 5 Contents... 7 Executive Summary World Robotics 2017 Service Robots... 12 1 Introduction into Service Robotics... 22 1.1 Structure of the World Robotics
Contents 7 Contents Foreword... 3 Editorial... 5 Contents... 7 Executive Summary World Robotics 2017 Service Robots... 12 1 Introduction into Service Robotics... 22 1.1 Structure of the World Robotics
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
E Technology: A. Innovations Activity: Introduction to Robotics
 Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
4/1/2011. Ken Goldberg UC Berkeley. Robot
 The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Design and analysis of Autonomous Robots
 Design and analysis of Autonomous Robots A.Rethinavelsubramanian 1 Assistant Professor & Head, Department of Mechanical Engineering K.S.K College of engineering & Technology,Kumbakonam Email:rvsm_me@yahoo.co.in
Design and analysis of Autonomous Robots A.Rethinavelsubramanian 1 Assistant Professor & Head, Department of Mechanical Engineering K.S.K College of engineering & Technology,Kumbakonam Email:rvsm_me@yahoo.co.in
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
GESTURE BASED ROBOTIC ARM
 GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
Adapting for Unmanned Systems
 Adapting for Unmanned Systems LTG Michael A. Vane Deputy Commanding General, Futures, and Director, Army Capabilities Integration Center US Army Training and Doctrine Command 23 Mar 11 1 Isaac Asimov's
Adapting for Unmanned Systems LTG Michael A. Vane Deputy Commanding General, Futures, and Director, Army Capabilities Integration Center US Army Training and Doctrine Command 23 Mar 11 1 Isaac Asimov's
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
CORC Exploring Robotics. Unit A: Introduction To Robotics
 CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
Noel Brown Head, School of Engineering University of Technology, Jamaica
 1 Noel Brown Head, School of Engineering University of Technology, Jamaica 2 Definitions Why do we need Robots? Is there a need to replace human labour with robots? Implications for: Engineering Agriculture
1 Noel Brown Head, School of Engineering University of Technology, Jamaica 2 Definitions Why do we need Robots? Is there a need to replace human labour with robots? Implications for: Engineering Agriculture
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
ROBOTICS A. WHAT IS A ROBOT?
 ROBOTICS In this Unit we will talk about a new branch of Computer Science, Robotics, and you will read about robots, their characteristics, uses and possible future developments. A. WHAT IS A ROBOT? 1
ROBOTICS In this Unit we will talk about a new branch of Computer Science, Robotics, and you will read about robots, their characteristics, uses and possible future developments. A. WHAT IS A ROBOT? 1
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, August 18, ISSN
 AUTOMATION AND ROBOTICS IN INTELLIGENT ENVIRONMENT Prof. Y. P. Rao, Pravat Nayak & Gyanesh Dubey Mechanical Engineering Department, Electronics Maintenances, HR & PSD RVS College of Engineering & Technology,
AUTOMATION AND ROBOTICS IN INTELLIGENT ENVIRONMENT Prof. Y. P. Rao, Pravat Nayak & Gyanesh Dubey Mechanical Engineering Department, Electronics Maintenances, HR & PSD RVS College of Engineering & Technology,
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting
 An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
FUNDAMENTALS OF ROBOTICS
 FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
What Is Robotics? What Is a Robot? Basic Components of a Robot
 What Is a Robot? A robot is a programmable mechanical device that can perform tasks and interact with its environment (with no human interaction). The word robot was coined by the Czech playwright Karel
What Is a Robot? A robot is a programmable mechanical device that can perform tasks and interact with its environment (with no human interaction). The word robot was coined by the Czech playwright Karel
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it
 MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.