ENME 489L: Biologically Inspired Robotics
|
|
|
- Suzanna Beasley
- 6 years ago
- Views:
Transcription
1 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland
2 Course Introduction
3 Logistics Class Time: Tuesday and Thursday 2PM to 3:15PM Class Location: JMP Office Hours: Tuesday and Thursday 3:30PM to 5:00PM Course Instructor: Dr. Satyandra K. Gupta Phone: , Office: Room 2135 EGR Course Co-Instructor: Arvind Ananthanarayanan Phone: Office: Room 0124 EGR
4 Main Topics Fundamentals of Traditional Robots Fundamentals of Biologically Inspired Robots Design and Fabrication of Biologically Inspired Robots
5 Textbook Textbook and References J.J. Craig. Introduction to Robotics: Mechanics and Control. Prentice Hall; 3rd edition, Additional References G. A. Bekey. Autonomous Robots. MIT Press, Karl Williams. Amphibionics: Build Your Own Biologically Inspired Reptilian Robot. McGraw-Hill/TAB Electronics, David Cook. Robot Building for Beginners. Apress, 2002.
6 Homework, Exam, and Project 8 Homeworks (done individually) (20% of the overall grade) Projects (done in groups of 3) (40% of the overall grade) 1 Final Exam (40 % of the overall Grade)
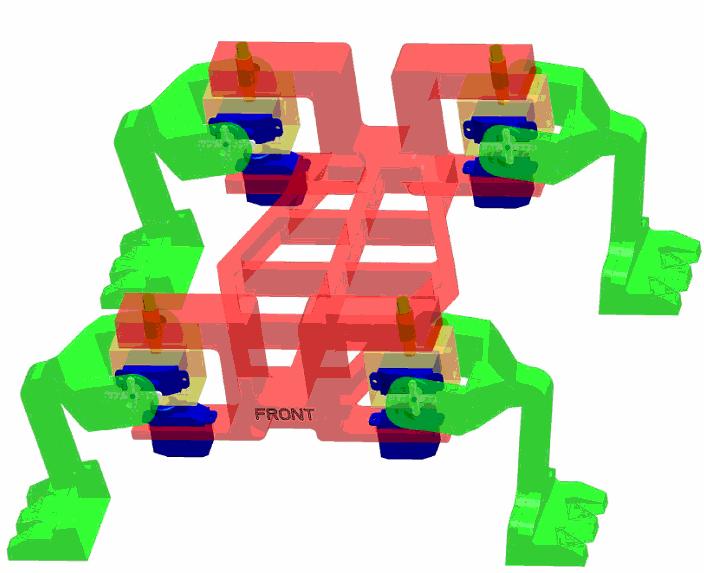
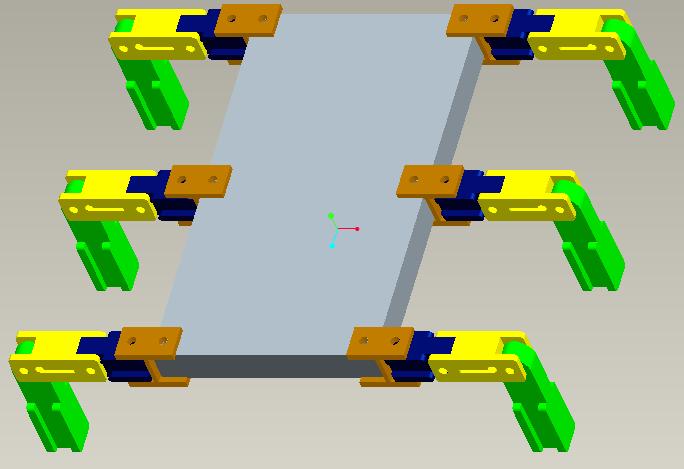
7 Project
8 Goal Design a 4 legged bio-inspired robot (no wheels) that can perform the following function Travel on a straight line 25 times its body s largest dimension in two minutes or less Other information Main emphasis is on mechanical design to reproduce kinematics of a gait Use FDM to make structures Some programming is needed Use off-the-shelf motors
9 Robot Testing You will need to demonstrate your robot on two different surfaces Parking lot Carpeted floor The slop of the surface will be less than 5 degrees and the test will be done on the dry surface
10 Final Demonstrations The final project submission will consist of a written report describing the robot design, performance test results, manufacturing process description, and engineering drawings You will also need to submit Pro/Engineer models of your design
11 Main components Mechanical structure (created using FDM) Controller board (~ $25) Batteries (~ $20 to $30) Motors (~ $15 per motor) Department budget is $150 per robot
12 Samples of Robots Built in Spring 2007
13 Ant Robot

14 Beetle Robot
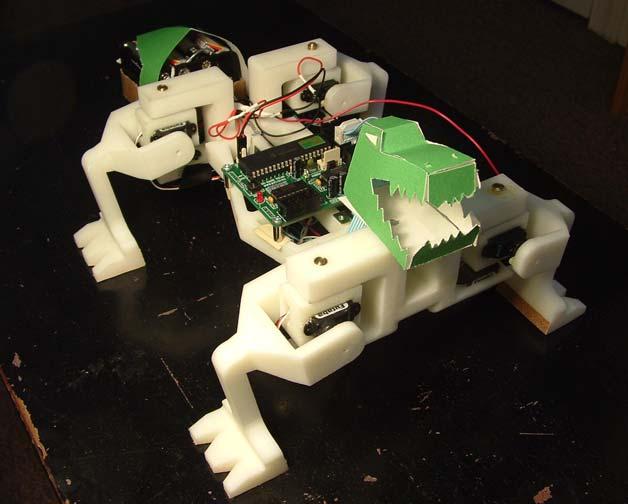
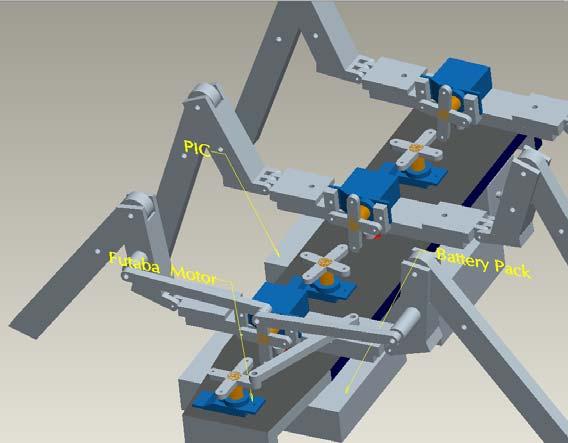
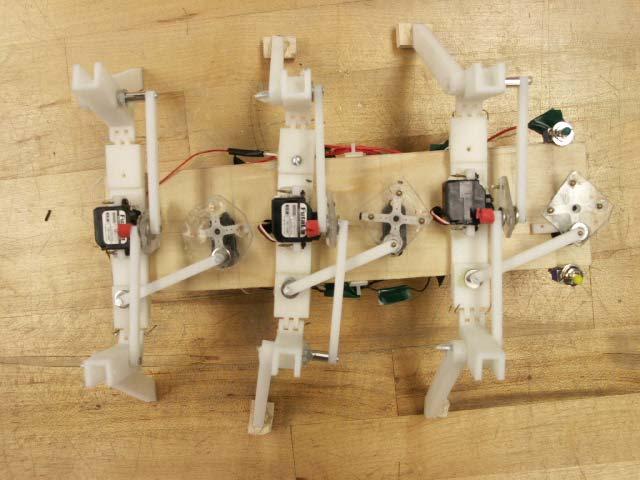
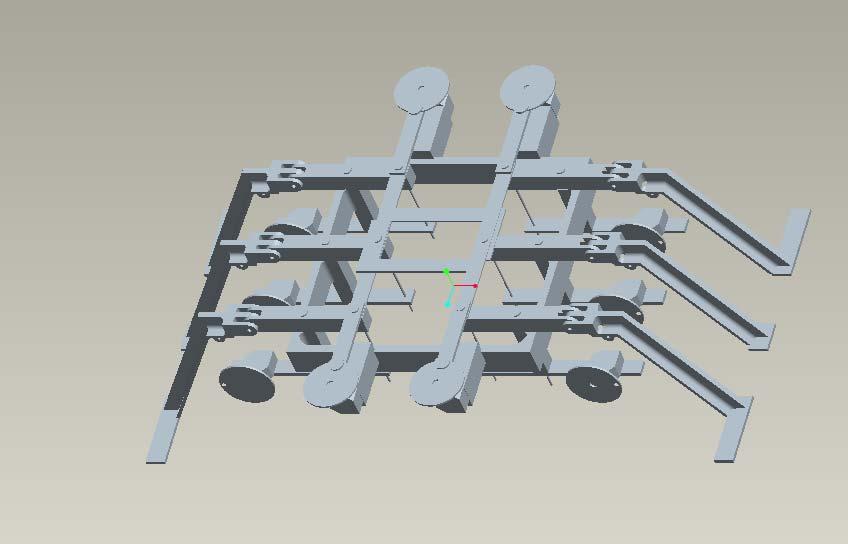
15 Crocobot

16 Fire Ant Robot


17 Ladybug Robot

18 Lizard Robot
19 Tiggerbot
20 Project Teams Team consisting of three students Team member names should be sent to by 6PM on Sunday February 3rd
21 Robotics Preliminaries
 Czech: robota servitude, forced labor A machine (sometimes resembling a human being in appearance) designed to function in place")

22 What is a robot? Origin: Karel Capek's play R.U.R. (1921) Czech: robota servitude, forced labor A machine (sometimes resembling a human being in appearance) designed to function in place of a living agent, esp. one which carries out a variety of tasks automatically or with a minimum of external impulse. - Oxford English Dictionary A reprogrammable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks. - The Robot Institute of America Sony Qrio
23 Why Use Robots?





24 Why Use Robots? For tasks that are... Hazardous Repetitious Dexterous LAPD Bomb Squad Automated car painting Automotive welding Precise Inaccessible Circuit board manufacturing DaVinci robot for cardiothoracic surgery
25 Where Are Robots Being Used?
26 Robot Applications Assembly Automotive Welding Automotive Paining Space Applications Explosive Disposal Medical Entertainment Measurement and Inspection Machining Survey Reconnaissance
27 Robot Descriptors Stationary vs. mobile Manual vs. programmable vs. autonomous Remote operated vs. wired Payload size Speed of task or motion Work volume Number of degrees of freedom (DOF) Power consumption Lifetime





28 Stationary Robots Functions Gripping/translating Inspecting/measuring Operating/manipulating Applications Manufacturing - Machining - Assembling Medical devices Spacecraft Automobile manufacturing ISS and Endeavor handoff CMM CNC Mill M-850 Hexapod







29 Mobile Robots Mobile platforms, with other robots attached Primary function: locomotion Applications Transportation platform - Exploration - Reconnaissance - Surveillance Applications (continued) Consumer products Roomba vacuum Robomower Toys Honda Asimo NASA Mars rover Maridan 600 UUV Sony Aibo Remote controlled car
30 Examples of Bio-Inspired Robots
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
外国語作文 ( 英語 ) Foreign Language Essay (English)
 Foreign Language Essay (English)") 平成 22 年度 (2010 年度 ) 第 1 学年 4 月入学 第 2 学年 4 月編入学選抜検査 Spring Entrance Examination 2010 for 1 st and 2 nd Grade Applicants 外国語作文 ( 英語 ) Foreign Language Essay (English) 平成 22 年 (2010 年 )2 月 3 日 ( 水 ) 実施 Wednesday,
平成 22 年度 (2010 年度 ) 第 1 学年 4 月入学 第 2 学年 4 月編入学選抜検査 Spring Entrance Examination 2010 for 1 st and 2 nd Grade Applicants 外国語作文 ( 英語 ) Foreign Language Essay (English) 平成 22 年 (2010 年 )2 月 3 日 ( 水 ) 実施 Wednesday,
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
To boldly go where no man has gone before!
 To boldly go where no man has gone before! T.J. Kirk (from Star Trek) University of Texas at Arlington CSE 4360/5364 Autonomous Robots Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and
To boldly go where no man has gone before! T.J. Kirk (from Star Trek) University of Texas at Arlington CSE 4360/5364 Autonomous Robots Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
FUNDAMENTALS OF ROBOTICS
 FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
BOMB ROBOTS NASA CURIOSITY MARS ROVER
 BOMB ROBOTS This robot is used by FBI bomb-squads in Oklahoma. It allows access to the bomb without endangering human life as it investigates, moves, and when necessary, disables the bomb. NASA CURIOSITY
BOMB ROBOTS This robot is used by FBI bomb-squads in Oklahoma. It allows access to the bomb without endangering human life as it investigates, moves, and when necessary, disables the bomb. NASA CURIOSITY
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
New Solution for Walking Robot
 New Solution for Walking Robot Tadeusz Mikolajczyk 1,a*, Tomasz Fas 1,b, Tomasz Malinowski 1,c, ukasz Romanowski 1,d 1 University of Technology and Life Sciences, Department of Production Engineering 85-876
New Solution for Walking Robot Tadeusz Mikolajczyk 1,a*, Tomasz Fas 1,b, Tomasz Malinowski 1,c, ukasz Romanowski 1,d 1 University of Technology and Life Sciences, Department of Production Engineering 85-876
Robotics Intelligent connection of the perception to action. Applications
 Robotics Intelligent connection of the perception to action Applications Applications Automotive industry Assembly Medical laboratories Medecine Nuclear energy Agriculture Spatial exploration Underwater
Robotics Intelligent connection of the perception to action Applications Applications Automotive industry Assembly Medical laboratories Medecine Nuclear energy Agriculture Spatial exploration Underwater
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
History of Robotics. University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action.
 History of Robotics University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action Codrin Pasca May 5, 2003 Introduction Definitions The early stages Our times
History of Robotics University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action Codrin Pasca May 5, 2003 Introduction Definitions The early stages Our times
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics. AI and Robots. A History of Robots in AI
 Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES
 A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT
 EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
Activity Template. Subject Area(s): Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:
: Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:") Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT *
 EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT * N.J. KOHUT, D. W. HALDANE Department of Mechanical Engineering, University of California, Berkeley Berkeley, CA 94709, USA D. ZARROUK, R.S.
EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT * N.J. KOHUT, D. W. HALDANE Department of Mechanical Engineering, University of California, Berkeley Berkeley, CA 94709, USA D. ZARROUK, R.S.
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Automated Manufacturing
 Chapter 22 Automated Manufacturing LEARNING OBJECTIVES After studying this chapter, students will be able to: Define the term automation. Describe several automated production systems. Define the term
Chapter 22 Automated Manufacturing LEARNING OBJECTIVES After studying this chapter, students will be able to: Define the term automation. Describe several automated production systems. Define the term
ME 487 Mechatronics. Office: JH 515, Tel.: (505)
") ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
CS686: Robot Motion Planning and Applications
 CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
Outline. DD2426 Robotics and Autonomous Systems Lecture 1: Introduction. Swedish robotics. ABB - Industrial robots
 Outline DD2426 Robotics and Autonomous Systems Lecture 1: Introduction Examples of swedish robotics Some application domains A case study Video from last year Kungl Tekniska Högskolan patric@kth.se October
Outline DD2426 Robotics and Autonomous Systems Lecture 1: Introduction Examples of swedish robotics Some application domains A case study Video from last year Kungl Tekniska Högskolan patric@kth.se October
A Brief Survey on Robotics
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Logistics Some Key Points
 Logistics Some Key Points For students just joined, read carefully first Sakai announcement and the slides of the first lecture on course logistics Use CS460F@gmail.com for any course related questions
Logistics Some Key Points For students just joined, read carefully first Sakai announcement and the slides of the first lecture on course logistics Use CS460F@gmail.com for any course related questions
ROBOTICS. Museum Classroom Programs. Pre- and Postvisit Activities. Grades 4 8. courtesy NASA/ JPL LL-050
 ROBOTICS Museum Classroom Programs Pre- and Postvisit Activities LL-050 INFORMATION & ACTIVITIES: Robotics We re Glad You re Coming! Thank you for selecting this Museum Classroom Programs class at the
ROBOTICS Museum Classroom Programs Pre- and Postvisit Activities LL-050 INFORMATION & ACTIVITIES: Robotics We re Glad You re Coming! Thank you for selecting this Museum Classroom Programs class at the
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 1 Aug 21 st, 2018 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 Instructor Pranav Mantini Email: pmantini@uh.edu
Digital Image Processing COSC 6380/4393 Lecture 1 Aug 21 st, 2018 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 Instructor Pranav Mantini Email: pmantini@uh.edu
CORC Exploring Robotics. Unit A: Introduction To Robotics
 CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
REQUEST FOR PROPOSAL FOR ENGINEERING DESIGN ROBO INCHWORM. EGR 3380 Engineering Design I SPRING 2011
 REQUEST FOR PROPOSAL FOR ENGINEERING DESIGN ROBO INCHWORM photo by Travis Stansbury EGR 3380 Engineering Design I SPRING 2011 Department of Electrical and Computer Engineering Department of Mechanical
REQUEST FOR PROPOSAL FOR ENGINEERING DESIGN ROBO INCHWORM photo by Travis Stansbury EGR 3380 Engineering Design I SPRING 2011 Department of Electrical and Computer Engineering Department of Mechanical
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Robotics: Robot. Robotics
 Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
What Is Robotics? What Is a Robot? Basic Components of a Robot
 What Is a Robot? A robot is a programmable mechanical device that can perform tasks and interact with its environment (with no human interaction). The word robot was coined by the Czech playwright Karel
What Is a Robot? A robot is a programmable mechanical device that can perform tasks and interact with its environment (with no human interaction). The word robot was coined by the Czech playwright Karel
Development of a Controlling Program for Six-legged Robot by VHDL Programming
 Development of a Controlling Program for Six-legged Robot by VHDL Programming Saroj Pullteap Department of Mechanical Engineering, Faculty of Engineering and Industrial Technology Silpakorn University
Development of a Controlling Program for Six-legged Robot by VHDL Programming Saroj Pullteap Department of Mechanical Engineering, Faculty of Engineering and Industrial Technology Silpakorn University
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
E Technology: A. Innovations Activity: Introduction to Robotics
 Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Topic: Building Robot Model (D10) Names: Christian Feisel, Chad Lauffer, Joseph Yagloski Jr. Date: March 2, Building Model
 Names: Christian Feisel, Chad Lauffer, Joseph Yagloski Jr. Date: March 2, Building Model") Topic: Building Robot Model (D10) Names: Christian Feisel, Chad Lauffer, Joseph Yagloski Jr. Date: March 2, 2000 Building Model Summary Timely production of models and prototypes allows accurate evaluation
Topic: Building Robot Model (D10) Names: Christian Feisel, Chad Lauffer, Joseph Yagloski Jr. Date: March 2, 2000 Building Model Summary Timely production of models and prototypes allows accurate evaluation
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 4: Applications of Robotics Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 4: Applications of Robotics Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Kinematic And Dynamic Analysis Of A Robot Arm Used For All Terrain Robot
 Kinematic And Dynamic Analysis Of A Robot Arm Used For All Terrain Robot Amey V. Sutar Production Engineering Dept. Name of organization - COEP, Pune, India Dr. S. S. Ohol Mechanical Engineering Dept.
Kinematic And Dynamic Analysis Of A Robot Arm Used For All Terrain Robot Amey V. Sutar Production Engineering Dept. Name of organization - COEP, Pune, India Dr. S. S. Ohol Mechanical Engineering Dept.
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
4/1/2011. Ken Goldberg UC Berkeley. Robot
 The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Contents. Oxford University Press
 Contents 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical
Contents 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical
DREAM BIG ROBOT CHALLENGE. DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course.
 DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
I like to call this robot a rover, as I tried to pattern it after NASA s designs. Figure 1-1 shows the general outline of the finished rover.
 1 The task of building a robot is unlike any other in computer science. It s a strange amalgamation of computer, electrical, and mechanical engineering. Being able to program is great (and necessary),
1 The task of building a robot is unlike any other in computer science. It s a strange amalgamation of computer, electrical, and mechanical engineering. Being able to program is great (and necessary),
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Topic: Robots and Job-Bots Teacher Information
 Topic: Robots and Job-Bots Teacher Information Time Allowance 90 min. Background The idea of artificial beings dates back to 2000 B.C., when the Egyptians used a lever action door in a tomb. In the Middle
Topic: Robots and Job-Bots Teacher Information Time Allowance 90 min. Background The idea of artificial beings dates back to 2000 B.C., when the Egyptians used a lever action door in a tomb. In the Middle
Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
History and Philosophy of Robotics
 Foundations of Robotics Rod Grupen Department of Computer Science University of Massachusetts Amherst History and Philosophy of Robotics 2 The Iliad (850 BC) a great epic describing the Trojan war, a world
Foundations of Robotics Rod Grupen Department of Computer Science University of Massachusetts Amherst History and Philosophy of Robotics 2 The Iliad (850 BC) a great epic describing the Trojan war, a world