Chapter 1 Introduction to Robotics
|
|
|
- Rachel Weaver
- 5 years ago
- Views:
Transcription
1 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1
2 I. Definition of Robotics Definition (Robot Institute of America): A robot is a programmable multifunction manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks. Robots can be autonomous or semi-autonomous and range from humanoids to industrial robots, and even microscopic nano robots. By mimicking a lifelike appearance or automating movements, a robot may convey a sense of intelligence or thought of its own. 2
3 A typical robot upper arm shoulder elbow lower arm wrist Chest (base) end effector 3
4 Assembly Applications of robotics Welding, painting Surveys Medical applications Pick and place. Assisting disabled individuals Hazardous environments Underwater, space, and remote locations 4

5 Robot examples An experimental robot picks up a simulated pipe bomb during a demonstration for the media. This new technology enables to make bomb disposal easier and safer for police bomb squads. (Sandia National Laboratories in Albuquerque) 5

6 Robot examples The Nomad robot during its solo drive on an icy Antartic plain. The robot, a product of the university's Robotics Institute, began testing its wheels in January after it was taken by helicopter to a harsh region known as Elephant Moraine where it was left to inspect rocks and look for meteorites. (Carnegie Mellon Uniuversity ) 6

7 Robotics surgery Doctor Franckle watches a video monitor as he assists in a gall bladder (safra kesesi) operation using a robotic surgery machine called da Vinci Surgical System. Robot examples Franckle assited Dr. Andrew Boyarsky, who was manipulating small robotic instruments, one is seen on monitor, while looking at a threedimensional image of the patient's abdomen from a work station about 10 feet away from the patient. 7


8 Robot examples 8




9 Robot examples: Biomimetic Robots Using biological principles to reduce design space BigDog; Boston Dynamics MFI; Harvard & Berkeley Ayers; Northeastern 9
10 Basic components of robots Manipulators End effectors Sensors Software Actuators Controller Processor 10
11 Manipulator Open chain kinematic structure with mostly six DoF. Manipulator = arm + wrist 6 DoF = 3 DoF + 3 DoF Arm: Used for positioning the wrist Wrist: Used for angular positioning (orientation) the end effectors. 11
12 Types of robot arms 12


13 Types of robot arms Articulated robot arm 3R: Three revolute joint. 13


14 Articulated Configuration Features Light payload capacity Lower accuracy Easy to integrate with other manipulators 14

15 Types of robot arms Cartesian robot arm 3P: Three prismatic joint. 15


16 Cartesian Configuration Features High resolution High accuracy High payload capacity More volume needed for motion Difficult to integrate with other machines Uniform resolution Epson Cartesian Arm Reachable Workspace 16
17 Types of robot arms Cylindirical robot arm R2P 17


18 Cylindrical Configuration Joint coordinates map to cylindrical coordinates r, θ, z Non-uniform precision Horizontal precision highest along inside edge of work envelope Denso Cylindrical arm Reachable Workspace 18
19 Types of robot arms Spherical robot arm 2RP 19



20 Spherical Configuration Joint variables directly correspond to spherical coordinates φ θ r Reachable Workspace 20
 robot")
21 Types of robot arms SCARA (selective compliance assembly robot arm) robot arm 21


22 SCARA Configuration Introduced in 1979 Revolutionized manufacturing of small electronics Reachable Workspace 22

23 Types of robot arms Human arm 23
24 Types of robot arms Human arm model 24

25 ( 25
26 Wrist motions 26
27 Robots degrees of freedom Degrees of Freedom: Number of independent position variables which would has to be specified to locate all parts of a mechanism. In most manipulators this is usually the number of joints. 27
28 Robots degrees of freedom 1DoF 2DoF 3 DoF 28
29 Robots degrees of freedom Oussama Khatib, Lecture Notes. 29
30 Robots degrees of freedom 30
31 Robots degrees of freedom If the robot is a mobile robot, then, DoF of the system is n
32 32

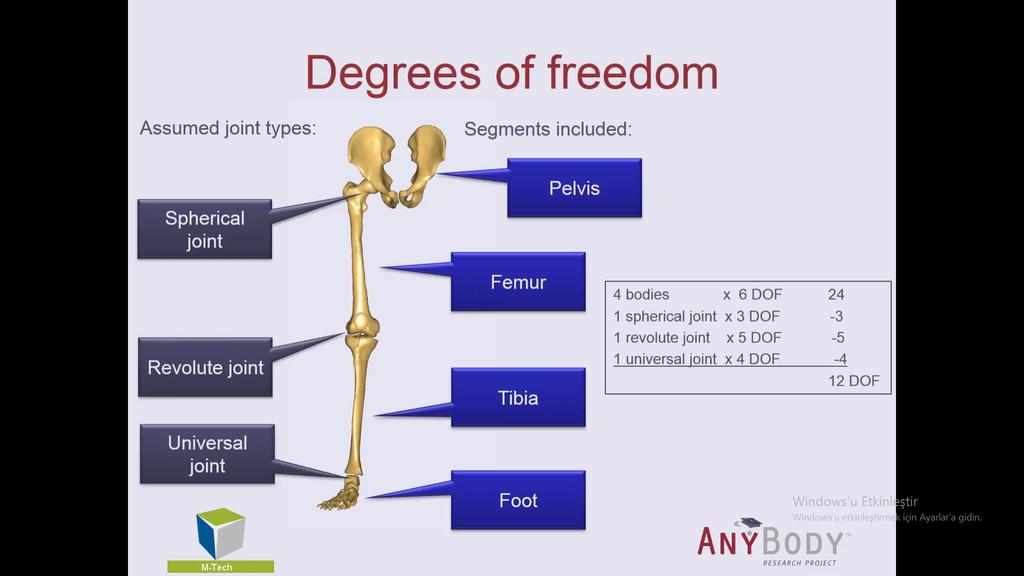
33 What is the DoF of this moving human model? Pelvis : 6 DoF body 3 DoF joint Total = 6+ 3x3 + 2x1 + 2x2 + 2x1 Total = 23 DoF 1 DoF joint 2 DoF joint 1 DoF joint Anderson&Pandy,



34 Robot Joints Prismatic Joint: Linear, No rotation involved. (Hydraulic or pneumatic cylinder) Revolute Joint: Rotary, (electrically driven with stepper motor, servo motor) 34

 Increased accuracy Higher payload Difficult to integrate Require")
35 Common Robot Configurations Revolute joints (R) Compact Increased dexterity easier to maneuver around obstacles Large kinematic and dynamic coupling between links Larger error accumulation Difficult control problem Prismatic joints (P) Increased accuracy Higher payload Difficult to integrate Require more volume 35


36 Example end-effector: Grippers Anthropomorphic or task-specific Force control v. position control Utah MIT hand 36

37 Actuators Common robotic actuators utilize combinations of different electro-mechanical devices Synchronous motor Stepper motor AC servo motor Brushless DC servo motor Brushed DC servo motor 37





38 Actuators Pneumatic Cylinder Hydraulic Motor Stepper Motor Pneumatic Motor DC Motor Servo Motor 38
 Robots often need information that is beyond 5 human senses (e.")
 Accelerometer Using Piezoelectric Effect Flexiforce Sensor 39")
39 Sensors Human senses: sight, sound, touch, taste, and smell provide us vital information to function and survive Robot sensors: measure robot configuration/condition and its environment and send such information to robot controller as electronic signals (e.g., arm position, presence of toxic gas) Robots often need information that is beyond 5 human senses (e.g., ability to: see in the dark, detect tiny amounts of invisible radiation, measure movement that is too small or fast for the human eye to see) Accelerometer Using Piezoelectric Effect Flexiforce Sensor 39


40 Sensors Vision Sensor: e.g., to pick bins, perform inspection, etc. Part-Picking: Robot can handle work pieces that are randomly piled by using 3-D vision sensor. Since alignment operation, a special parts feeder, and an alignment pallete are not required, an automatic system can be constructed at low cost. In-Sight Vision Sensors 40

41 Sensors Force Sensor: e.g., parts fitting and insertion, force feedback in robotic surgery Parts fitting and insertion: Robots can do precise fitting and insertion of machine parts by using force sensor. A robot can insert parts that have the phases after matching their phases in addition to simply inserting them. It can automate highskill jobs. 41
42 Accuracy, Repeatability and Resolution Accuracy: A measure of how close a manipulator can come to a given point within its workspace Repeatability: A measure of how close a manipulator can return to a previously taught point Resolution (Precision): The smallest increment of motion that can be sensed (executed). It is a function of distance traveled and the number of bits of encoder accuracy. Accuracy A B Resolution Actual Desired Position 42
43 Robot Specifications Joint Variable (joint): Relative displacement between adjacent links. Can be revolute or prismatic. End effector: Gripper or tool used to perform the robots tasks. Degree of freedom (DOF) Number of joints (DOF > 6 implies redundant robot) Workspace (work envelope): Total volume spread out by the end effector as the manipulator executes all possible motions Accuracy, Repeatability and Resolution Speed and Acceleration (min and max) Payload Capacity 43
44 Typical Robot Specifications Hydraulic or Electric Payload capacity Kgs (Hydraulic) 1 25 Kgs (Electric) Degrees of freedom: 4 to 7 based on application Repeatablity ± 1 mm 1.5mm (Hydraulic) ± 0.05mm 0.01mm (Electric) Cost $80,000 - $200,000 (Hydraulic) $40,000 $100,000 (Electric) 44
45 Robotic System Architecture Components Mechanical structure Drives Electric Hydraulic Pneumatic Computing and Control Sensors Encoders Force Vision many more Communication CAN, ethernet, Wireless, Serial link (RS232), USB, analog link, PROFIBus, GPIB, and many more Environment Sensors Planner Controller Computer Drives World space Output Mechanical Structure Configuration Sensor 45
46 Robot Programming 46
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Design and Analysis of Articulated Inspection Arm of Robot
 VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
AUOTOMATIC PICK AND PLACE ROBOT
 AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
An Introduction to Robotics. Dr. Bob Williams, Mechanical Engineering, Ohio University. Table of Contents
 An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
An Introduction to Robotics Dr. Bob Williams, williar4@ohio.edu Mechanical Engineering, Ohio University Table of Contents PHOTO GALLERY... 2 HISTORY... 9 DEFINITIONS... 10 APPLICATIONS... 12 COMMON ROBOT
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology
 ISSN No: 2454-9614 Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology S.Dineshkumar, M.Satheeswari, K.Moulidharan, R.Muthukumar Electronics and Communication Engineering,
ISSN No: 2454-9614 Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technology S.Dineshkumar, M.Satheeswari, K.Moulidharan, R.Muthukumar Electronics and Communication Engineering,
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
ROBOTICS & EMBEDDED SYSTEMS
 ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Robotics: Robot. Robotics
 Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot
 An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
, TECHNOLOGY. SAULT COLLEGE OF APPLIED ARTS SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: ROBOTIC & CONTROL SYSTEMS
 SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
GESTURE BASED ROBOTIC ARM
 GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING
 THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
Prof. Ciro Natale. Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri
 Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Chapter 14 Automation of Manufacturing Processes and Systems
 Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Automated Manufacturing
 Chapter 22 Automated Manufacturing LEARNING OBJECTIVES After studying this chapter, students will be able to: Define the term automation. Describe several automated production systems. Define the term
Chapter 22 Automated Manufacturing LEARNING OBJECTIVES After studying this chapter, students will be able to: Define the term automation. Describe several automated production systems. Define the term
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
FABRICATION OF PNEUMATIC PICK AND PLACE ROBOT
 International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 7, July 2017, pp. 594 600, Article ID: IJCIET_08_07_063 Available online at http://www.ia aeme.com/ijciet/issues.asp?jtype=ijciet&vtyp
International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 7, July 2017, pp. 594 600, Article ID: IJCIET_08_07_063 Available online at http://www.ia aeme.com/ijciet/issues.asp?jtype=ijciet&vtyp
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Structure Design of a Feeding Assistant Robot
 Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
3-Degrees of Freedom Robotic ARM Controller for Various Applications
 3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
Lecture 10. Thermal Sensors
 Lecture 10 Thermal Sensors DS1620 Digital thermometer Provides 9-bit temperature readings Temperature range from -55 o C to 125 o C Acts as a thermostat Detail Description DS1620 with BS2 Programming for
Lecture 10 Thermal Sensors DS1620 Digital thermometer Provides 9-bit temperature readings Temperature range from -55 o C to 125 o C Acts as a thermostat Detail Description DS1620 with BS2 Programming for
Modelling and Structural, Analysis of a 6-DOF Robot Spray Coating Manipulator
 The International Journal of Engineering and Science (IJES) Volume 7 Issue 1 Pages PP 48-56 2018 ISSN (e): 2319 1813 ISSN (p): 2319 1805 Modelling and Structural, Analysis of a 6-DOF Robot Spray Coating
The International Journal of Engineering and Science (IJES) Volume 7 Issue 1 Pages PP 48-56 2018 ISSN (e): 2319 1813 ISSN (p): 2319 1805 Modelling and Structural, Analysis of a 6-DOF Robot Spray Coating
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY
 INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Familiarization with the Servo Robot System
 Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Haptic Tele-Assembly over the Internet
 Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
Design and Implementation of FPGA-Based Robotic Arm Manipulator
 Design and Implementation of FPGABased Robotic Arm Manipulator Mohammed Ibrahim Mohammed Ali Military Technical College, Cairo, Egypt Supervisors: Ahmed S. Bahgat 1, Engineering physics department Mahmoud
Design and Implementation of FPGABased Robotic Arm Manipulator Mohammed Ibrahim Mohammed Ali Military Technical College, Cairo, Egypt Supervisors: Ahmed S. Bahgat 1, Engineering physics department Mahmoud
Since FLEXIBLE MANUFACTURING SYSTEM
 Since 1992 www.hytecheducation.in FLEXIBLE MANUFACTURING SYSTEM Flexible Manufacturing System with Conveyor Floor mounted machines Vertical axes are with brake motors Pneumatic grippers for loading and
Since 1992 www.hytecheducation.in FLEXIBLE MANUFACTURING SYSTEM Flexible Manufacturing System with Conveyor Floor mounted machines Vertical axes are with brake motors Pneumatic grippers for loading and
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
ห นยนต ขนาดเล ก ก บ อ ตสาหกรรมการผล ตสม ยใหม
 ห นยนต ขนาดเล ก ก บ อ ตสาหกรรมการผล ตสม ยใหม SMALL ROBOTS IN MODERN MANUFACTURING INDUSTRY ดร.ถว ดา มณ วรรณ สถาบ นว ทยาการห น ยนต ภาคสนาม FIBO มหาว ทยาล ยเทคโนโลย พระจอมเกล าธนบ ร KMUTT praew@fibo.kmutt.ac.th
ห นยนต ขนาดเล ก ก บ อ ตสาหกรรมการผล ตสม ยใหม SMALL ROBOTS IN MODERN MANUFACTURING INDUSTRY ดร.ถว ดา มณ วรรณ สถาบ นว ทยาการห น ยนต ภาคสนาม FIBO มหาว ทยาล ยเทคโนโลย พระจอมเกล าธนบ ร KMUTT praew@fibo.kmutt.ac.th
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
The Humanoid Robot ARMAR: Design and Control
 The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
Design of a Pick and Place Serial Manipulator
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design of a Pick and Place Serial Manipulator To cite this article: Oyetunji Oluremilekun Ropo et al 2018 IOP Conf. Ser.: Mater.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design of a Pick and Place Serial Manipulator To cite this article: Oyetunji Oluremilekun Ropo et al 2018 IOP Conf. Ser.: Mater.
ENME 489L: Biologically Inspired Robotics
 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
A DISTRIBUTED MICROPROCESSOR CONTROL
 A DISTRIBUTED MICROPROCESSOR CONTROL SYSTEM FOR AN INDUSTRIAL ROBOT, \ Raad by F. Rafauli. B. Eng. A Thesis Submitted to the School of Gr?duate Studies ~, in Partial Fulfilment of the Requirements for
A DISTRIBUTED MICROPROCESSOR CONTROL SYSTEM FOR AN INDUSTRIAL ROBOT, \ Raad by F. Rafauli. B. Eng. A Thesis Submitted to the School of Gr?duate Studies ~, in Partial Fulfilment of the Requirements for
MECHATRONICS SYSTEM DESIGN
 MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Servo Robot Training Systems
 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 07/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins 4 Included
Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 07/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins 4 Included
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
Mekanisme Robot - 3 SKS (Robot Mechanism)
") Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
ASPECTS ON THE DESIGN OF A TRACKED MINI ROBOT DESTINED FOR MILITARY ENGINEERING APPLICATIONS
 Petrişor, S.M., Bârsan, G. and Moşteanu, D.E., 2017. Aspects on the design of a tracked mini robot destined for military engineering applications. Romanian Journal of Technical Sciences Applied Mechanics,
Petrişor, S.M., Bârsan, G. and Moşteanu, D.E., 2017. Aspects on the design of a tracked mini robot destined for military engineering applications. Romanian Journal of Technical Sciences Applied Mechanics,
Actuators, sensors and control architecture
 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Low cost robotic arm and cobotic
 Low cost robotic arm and cobotic Autofina and University of Le Havre Autofina Session Agenda Introduction to Autofina Paresh Parekh, CEO Introduction to GREAH, University of Le Havre Jean-Francois Brethe
Low cost robotic arm and cobotic Autofina and University of Le Havre Autofina Session Agenda Introduction to Autofina Paresh Parekh, CEO Introduction to GREAH, University of Le Havre Jean-Francois Brethe
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
5250 Servo Robot Training Systems
 5250 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 02/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins
5250 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 02/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins
VTU NOTES QUESTION PAPERS NEWS RESULTS FORUMS
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Research Activities of the Mechatronic and Robotic Systems Laboratory
 Research Activities of the Mechatronic and Robotic Systems Laboratory Scott Nokleby, PhD, PEng Director scott.nokleby@uoit.ca mars.engineering.uoit.ca Current Projects Automation of Nuclear Fuel Manufacturing
Research Activities of the Mechatronic and Robotic Systems Laboratory Scott Nokleby, PhD, PEng Director scott.nokleby@uoit.ca mars.engineering.uoit.ca Current Projects Automation of Nuclear Fuel Manufacturing
DESIGN AND OPERATION OF SYNCHRONIZED ROBOTIC ARM
 DESIGN AND OPERATION OF SYNCHRONIZED ROBOTIC ARM Goldy Katal 1, Saahil Gupta 2, Shitij Kakkar 3 1 Student, Electrical and Electronics Department, Maharaja Agrasen Institute of Technology, Delhi, India,
DESIGN AND OPERATION OF SYNCHRONIZED ROBOTIC ARM Goldy Katal 1, Saahil Gupta 2, Shitij Kakkar 3 1 Student, Electrical and Electronics Department, Maharaja Agrasen Institute of Technology, Delhi, India,
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
A comparisonal study on robot arm in terms of light weight handling
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-208 A comparisonal study on robot
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-208 A comparisonal study on robot
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
Robotic modeling and simulation of palletizer robot using Workspace5
 Robotic modeling and simulation of palletizer robot using Workspace5 Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad Jaya Department of Modeling and Industrial Computing Faculty of Computer
Robotic modeling and simulation of palletizer robot using Workspace5 Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad Jaya Department of Modeling and Industrial Computing Faculty of Computer
SEMI AUTONOMOUS CONTROL OF AN EMERGENCY RESPONSE ROBOT. Josh Levinger, Andreas Hofmann, Daniel Theobald
 SEMI AUTONOMOUS CONTROL OF AN EMERGENCY RESPONSE ROBOT Josh Levinger, Andreas Hofmann, Daniel Theobald Vecna Technologies, 36 Cambridgepark Drive, Cambridge, MA, 02140, Tel: 617.864.0636 Fax: 617.864.0638
SEMI AUTONOMOUS CONTROL OF AN EMERGENCY RESPONSE ROBOT Josh Levinger, Andreas Hofmann, Daniel Theobald Vecna Technologies, 36 Cambridgepark Drive, Cambridge, MA, 02140, Tel: 617.864.0636 Fax: 617.864.0638
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT
 FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT Jagtap Gautami 1, Alve Sampada 2, Malhotra Sahil 3, Pankaj Dadhich 4 Electronics and Telecommunication Department, Guru Gobind Singh Polytechnic, Nashik
FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT Jagtap Gautami 1, Alve Sampada 2, Malhotra Sahil 3, Pankaj Dadhich 4 Electronics and Telecommunication Department, Guru Gobind Singh Polytechnic, Nashik
Course Title: Foundations of Robotics Course Number: Course Credit: 1
 Course Title: Foundations of Robotics Course Number: 9410110 Course Credit: 1 Course Description: This course provides students with a foundation in content and skills associated with robotics and automation,
Course Title: Foundations of Robotics Course Number: 9410110 Course Credit: 1 Course Description: This course provides students with a foundation in content and skills associated with robotics and automation,
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT
 T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,