Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
|
|
|
- Brenda Holland
- 5 years ago
- Views:
Transcription





1 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez
2 Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well!





3 Why Robotics? shift in robot numbers! Practice assembly pumping gas welding dancing packaging eating automobiles Promise



4 Current Robot Arm Applications Engineered environment Repeated motion Manufacturing 1 million arms in operation worldwide




5 Space - in-orbit, repair and maintenance, planetary exploration anthropomorphic design facilitates collaboration with humans Basic Science - computational models of cognitive systems, task learning, human interfaces Emerging Robotics Applications Health - clinical applications, "aging-inplace, physical and cognitive prosthetics in assisted-living facilities Military or Hazardous - supply chain and logistics support, refueling, bomb disposal, toxic/radioactive cleanup No or few robots currently operate reliably in these







6 kismet Why Robotics? Sony Aibo dogs had to LEARN to run Vibrant field other competitions Harold Cohen s Aaron




7 Why Robotics? A window to the soul... MIT s robotic fish with an unusual actuator! Rodney Brooks s Cog Advances in AI and in Robotics are one and the same. Monkey/machine interface at the Univ. of Pittsburgh AI-complete


8 Robotics challenges Navigation 05 Manipulation Humanoids 12-15



9 DARPA Robotics Challenge
10 Course Questions Why study robotics? What, exactly, is robotics about? Or at least what we learn here What work is involved?
11 What is a robot? Unicycling Autonomous : Robot :: Awake : Student Autonomous Choose one!


12 What is a robot? Physical instantiation (Hardware) System and properties



13 What is a robot? Robot : A physical system that autonomously senses the environment and acts in it. none Autonomy might be a continuous, not a discrete attribute Researchers disagree on what kind and how much autonomy is needed full Robot Wars, Battlebots FIRST Robotics Robocup There may be other axes along which to evaluate robots, too
14 World Modeling How much information about the world does the robot internalize? more Capabilities wow (10) less huh? (1) Who's making the decisions? human-controlled Autonomy independent
15 A E Bar Monkey B Al Gore ex-vp, Nobelian Genghis 11 robotic systems F C Robotic Insect da Vinci Robotic Surgeon D H G Roomba Robotic vacuum cleaner I Sims now with professor! J Stanford's Stanley/CMU's Boss each a $2 million winner K Shakey object- manipulator (pusher) from SRI (1969) Sojourner/Spirit/Opportunity Mars Exploration Rovers: 1997, 2004-now Perhaps include a robot of your own choosing Stanford Cart vision-based obstacle-avoider (1976) Unimate first industrial robotic arm, '61 (now in the hall of fame)
16 World Modeling more B Al Gore (11) Capabilities wow (10) less huh? (1) human-controlled Autonomy independent


 from SRI")

 Unimate first industrial")
17 A E Bar Monkey robotic barkeep B Al Gore ex-vp, Nobelian Genghis 11 robotic systems F C Robotic Insect da Vinci Robotic Surgeon D H G Roomba Robotic vacuum cleaner I Sims now with professor! J Stanford's Stanley/CMU's Boss each a $2 million winner K Shakey object- manipulator (pusher) from SRI (1969) Sojourner/Spirit/Opportunity Mars Exploration Rovers: 1997, 2004-now Perhaps include a robot of your own choosing Stanford Cart vision-based obstacle-avoider (1976) Unimate first industrial robotic arm, '61 (now in the hall of fame)
18 World Modeling Capability (0-10) Robot Plot more B Al Gore (11) E J Capabilities wow (10) Shakey (3) Stanford Cart (3) C less huh? (1) Genghis (3) human-controlled Autonomy independent
19 World Modeling Capability (0-10) Robot Plot more Al Gore (11) Sims (5) MERs (8) Stanley/Boss (9) Shakey (3) Stanford Cart (3) Bar Monkey (9) less da Vinci (2) Unimate (4) Roomba (7) Genghis (3) human-controlled Autonomy independent


 MERs (8)")
")
 Bar Monkey")
")
")

20 World Modeling Capability (0-10) Robot Plot more Al Gore (11) Sims (5) MERs (8) Stanley/Boss (9) Shakey (3) Stanford Cart (3) Bar Monkey (9) less da Vinci (2) Unimate (4) Roomba (7) Genghis (3) human-controlled Autonomy CS 154: algorithms for programming autonomous robots
21 Course Timeline Low-level robotics architecture motors/actuators sensors Vision 2wks regions and recognition features and matching Spatial Reasoning reasoning with uncertainty filtering and state estimation localization mapping localizing and mapping Spatial Planning 2wks 5wks 5wks configuration space kinematics, dynamics path planning pursuer/evader algorithms What am I? robots ~ bodies is seeing believing? where am I? how do I get there?
22 412 Course topics Introduction Robot hardware for mobile roobots, arms and UAV's Reactive robotics Modeling mobile robots, kinematics, navigation Robot sensors Robot arm types and kinematics Analytic and numerical arm inverse kinematics Machine vision and image processing Visual servo motion control Robot systems, mechatronics What am I? robots ~ bodies where am I? how do I get there? is seeing believing?
23 Robot timeline?




24 Fictional Robot timeline Putting these robots in chronological order?

25 Fictional robot timeline Karl Capek Rossum s Universal Robots I, Robot Asimov

26 Robot timeline Karl Capek Rossum s Universal Robots First Law: Isaac Asimov s Laws of Robotics A robot may not injure a human being, or, through inaction, allow a human being to come to harm. Second Law: A robot must obey orders given it by human beings, except where such orders would conflict with the First Law. Third Law: A robot must protect its own existence as long as such protection does not conflict with the First or Second Law. I, Robot
27 Real robot timeline




28 Real robot timeline Tortoise Elsie 1951 by Neurophysiologist Grey Walter...
 Kitchen (K) sp sh")
29 Shakey Nils Stanford Research Inst. first general-purpose mobile platform Living Room (L) Kitchen (K) sp sh tv rem Bedroom (B)
30 Robotics's Shakey start START At(sh,L) At(sp,K) At(rem,B) At(tv,L) Go(L,B) Go(L,K) Push(tv,L,K) Push(tv,L,B) At(sh,K) At(sp,K) At(rem,B) At(tv,K) Go(from,to) Preconditions: At(sh,from) Postconditions: At(sh,to) Push(obj,fr,to) ACTIONS Preconditions: At(sh,fr) At(obj,fr) Postconditions: At(sh,to) At(obj,to) At(sh,L) At(sp,L) At(rem,L) At(tv,L) GOAL for details, see CS 151!


31 Stanford Cart: SPA Hans SAIL SENSING perception world modeling Planning task execution motor control ACTING functional task decomposition horizontal subtasks


32 Cartland (outdoors)
")

33 Cartland (indoors)



34 Robot Insects Rodney MIT behavioral task decomposition vertical subtasks SENSING planning and reasoning identify objects build maps explore wander ACTING avoid objects


35 Subsumption Architecture Genghis in action! complex behavior = simple rules + complex environment
36 Subsumption Genghis 1) Standing by tuning the parameters of two behaviors: the leg swing and the leg lift 2) Simple walking: one leg at a time 3) Force Balancing: via incorporated force sensors on the legs 4) Obstacle traversal: the legs should lift much higher if need be 5) Anticipation: uses touch sensors (whiskers) to detect obstacles 6) Pitch stabilization: uses an inclinometer to stabilize fore/aft pitch 7) Prowling: uses infrared sensors to start walking when a human approaches 8) Steering: uses the difference in two IR sensors to follow 57 modules wired together!
37 Subsumption Architecture navigate behavior wander behavior runaway behavior
38 Finite-state Architecture navigate behavior wander behavior runaway behavior FSM / DFA
39 Course Questions Why study robotics? What, exactly, is robotics about? What work is involved?
40 Details Reading no required text Calendar Web Page First week's paper: Achieving Artificial Intelligence through Building Robots Rodney Brooks class meetings: Tue, Th 3:30-4:50 Lab CSC 229: W 2:00-4:30 pm real office hours: after class or W,F by appt Assignments... Three lab assignments An individual reading and presentation A group project Two in class exams

41 Lab Projects - Options Choose a platform The EV3 Lego Robot Kit Default Lego EV3 Other possibilities: Robot arm AIBO dog Pioneer UAV Others! spatial reasoning tag / hide & seek Beyond Botball Choose a task itself publishable fire extinguisher Vision guided motion Tele-operation



42 Robot and Project Options BotBall exhibition MindSensors camera publishable implementations Lego Mapping?



43 Robot and Project Options Home built arm Pic of our small arm and controller
44


45 Robot and Project Options Sony's AIBO Robot Dog 1 AIBO Robotics, unleashed Soccer, machine learning, human-robot interaction '06: aligning and scoring a goal '07-'08: line-following and landmarks lots of software on which to build CMU's Tekkotsu



46 Unmanned Autonomous Ground Vehicle Heading Outdoors With Engineeering! International Ground Vehicle Competition cooper union's roberto Mini Grand Challenge



47 Robot and Project Options Mobilizing laptop computers someday '05: AAAI Scavenger Hunt framework for almost any design




48 Other Options '04: NES Duck Hunt Wii, anyone? A robot system that partners in a game robotics.cs.brown.edu/projects/embodied_gaming/ A Turing machine Design and build a platform from scratch: wheeled or walking (not aerial or underwater, however )
4/30/13. + Admin. + What is a robot? Robotics. "I can't define a robot, but I know one when I see one. --Joseph Engelberger (1966)
") + Robotics http://www.youtube.com/watch?v=3eejcln5kyg CS311, Spring 2013 David Kauchak Some material adapted from slides from Zach Dodds + Admin + What is a robot? n Assignment 5 graded n Exam #2 available
+ Robotics http://www.youtube.com/watch?v=3eejcln5kyg CS311, Spring 2013 David Kauchak Some material adapted from slides from Zach Dodds + Admin + What is a robot? n Assignment 5 graded n Exam #2 available
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
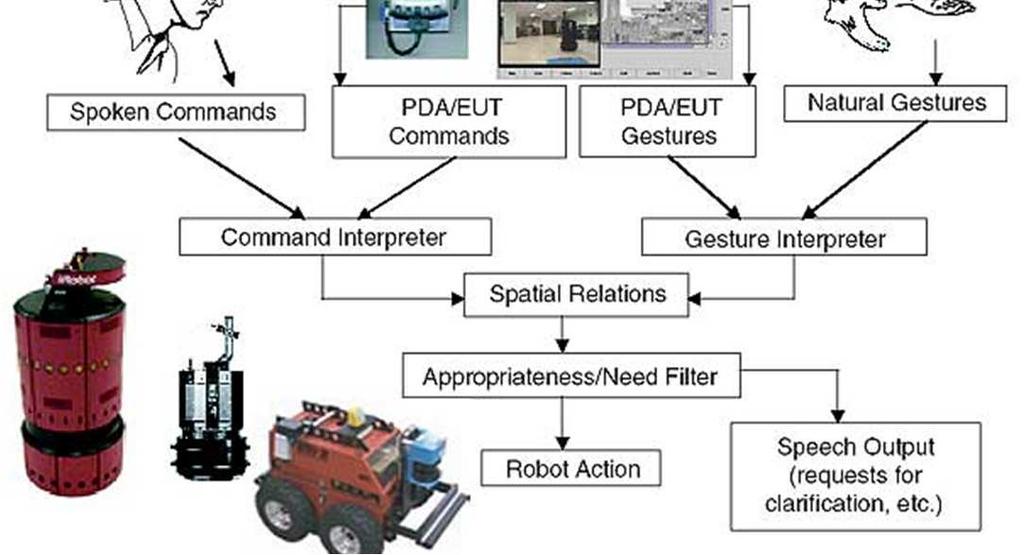
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics. AI and Robots. A History of Robots in AI
 Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Indoor vs Outdoor: Water, air, ground Autonomy depends on the need:
 I and Robotics Whatis a robot? Different types of robots. utonomy What do you find on an autonomous robot? Planning and Robotics STRIPS onjunctive goals Horisontal architecture Subsumption architecture
I and Robotics Whatis a robot? Different types of robots. utonomy What do you find on an autonomous robot? Planning and Robotics STRIPS onjunctive goals Horisontal architecture Subsumption architecture
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
A Quick history. Ioannis Rekleitis
 A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Abbreviated Modern History of Intelligent Mobile Robotics. August 26, 2014
 Abbreviated Modern History of Intelligent Mobile Robotics August 26, 2014 Reading Assignment Read Chapter 2 of Siegwart text (Locomotion) We ll begin studying that material on Thursday Objectives Understand
Abbreviated Modern History of Intelligent Mobile Robotics August 26, 2014 Reading Assignment Read Chapter 2 of Siegwart text (Locomotion) We ll begin studying that material on Thursday Objectives Understand
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Behavior-based robotics
 Chapter 3 Behavior-based robotics The quest to generate intelligent machines has now (2007) been underway for about a half century. While much progress has been made during this period of time, the intelligence
Chapter 3 Behavior-based robotics The quest to generate intelligent machines has now (2007) been underway for about a half century. While much progress has been made during this period of time, the intelligence
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Outline. DD2426 Robotics and Autonomous Systems Lecture 1: Introduction. Swedish robotics. ABB - Industrial robots
 Outline DD2426 Robotics and Autonomous Systems Lecture 1: Introduction Examples of swedish robotics Some application domains A case study Video from last year Kungl Tekniska Högskolan patric@kth.se October
Outline DD2426 Robotics and Autonomous Systems Lecture 1: Introduction Examples of swedish robotics Some application domains A case study Video from last year Kungl Tekniska Högskolan patric@kth.se October
Chapter 1 Part II. History of Robotics
 Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Chapter 1 Part II History of Robotics Overview What you will learn: The difference between industrial robots and other robots The four Ds of robotics Where and why we use robots in the modern world Overview
Cognitive robotics using vision and mapping systems with Soar
 Cognitive robotics using vision and mapping systems with Soar Lyle N. Long, Scott D. Hanford, and Oranuj Janrathitikarn The Pennsylvania State University, University Park, PA USA 16802 ABSTRACT The Cognitive
Cognitive robotics using vision and mapping systems with Soar Lyle N. Long, Scott D. Hanford, and Oranuj Janrathitikarn The Pennsylvania State University, University Park, PA USA 16802 ABSTRACT The Cognitive
Adapting for Unmanned Systems
 Adapting for Unmanned Systems LTG Michael A. Vane Deputy Commanding General, Futures, and Director, Army Capabilities Integration Center US Army Training and Doctrine Command 23 Mar 11 1 Isaac Asimov's
Adapting for Unmanned Systems LTG Michael A. Vane Deputy Commanding General, Futures, and Director, Army Capabilities Integration Center US Army Training and Doctrine Command 23 Mar 11 1 Isaac Asimov's
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
Introduction to Robotic Systems
 ENGR 207 Section 1: Introduction to Robotic Systems 1 Introduction to Robotic Systems What is a Robot? The term robot was first used in a 1920 science fiction play by the Czech writer Karel Čapek about
ENGR 207 Section 1: Introduction to Robotic Systems 1 Introduction to Robotic Systems What is a Robot? The term robot was first used in a 1920 science fiction play by the Czech writer Karel Čapek about
Richard Voyles Professor of Robotics School of Engineering Technology
 Richard Voyles Professor of Robotics School of Engineering Technology Unprecedented Optimism in Robotics & IOT! Education (all levels) Laypublic Government Leaders (jobs, innovation) Industry (buyers and
Richard Voyles Professor of Robotics School of Engineering Technology Unprecedented Optimism in Robotics & IOT! Education (all levels) Laypublic Government Leaders (jobs, innovation) Industry (buyers and
Using Reactive and Adaptive Behaviors to Play Soccer
 AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Robotics and Artificial Intelligence. Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp
 Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
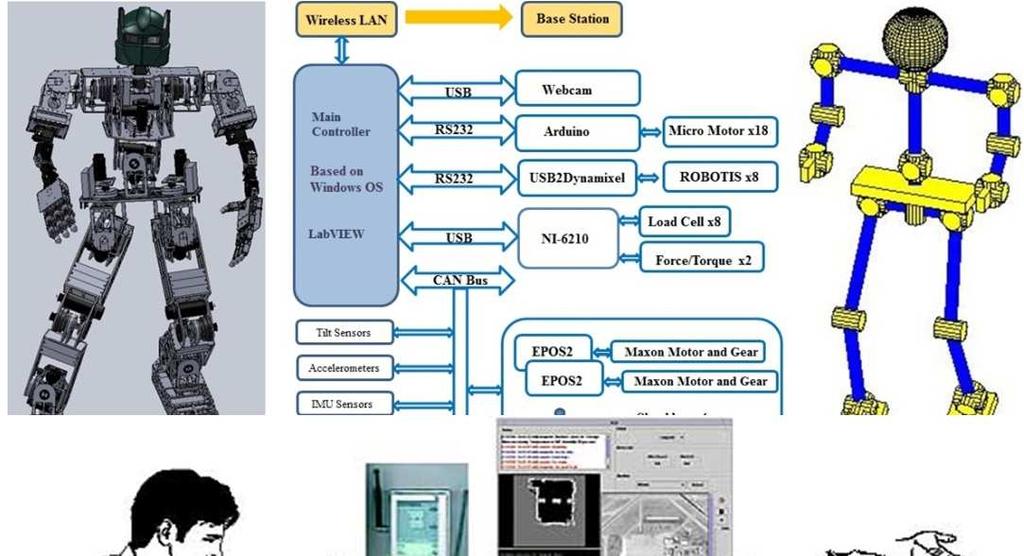
Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
ENME 489L: Biologically Inspired Robotics
 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
CS 393R. Lab Introduction. Todd Hester
 CS 393R Lab Introduction Todd Hester todd@cs.utexas.edu Outline The Lab: ENS 19N Website Software: Tekkotsu Robots: Aibo ERS-7 M3 Assignment 1 Lab Rules My information Office hours Wednesday 11-noon ENS
CS 393R Lab Introduction Todd Hester todd@cs.utexas.edu Outline The Lab: ENS 19N Website Software: Tekkotsu Robots: Aibo ERS-7 M3 Assignment 1 Lab Rules My information Office hours Wednesday 11-noon ENS