CS 393R. Lab Introduction. Todd Hester
|
|
|
- Lawrence Dixon
- 6 years ago
- Views:
Transcription
1 CS 393R Lab Introduction Todd Hester
2 Outline The Lab: ENS 19N Website Software: Tekkotsu Robots: Aibo ERS-7 M3 Assignment 1 Lab Rules
3 My information Office hours Wednesday 11-noon ENS 19N
4 Lab information The lab is in the basement of ENS Room 19N The lab has 9 workstations The server: luigi.csres.utexas.edu NIF+NFS server and wireless gateway Use other machines if possible Do not reboot!! Machine login Username: your last name Password: cs393r Change your password! (type passwd) Door code!
5 Lab information Lab security Be aware when leaving anything unattended in the lab Never leave the robots unattended! Always lock up your robots when you leave Do not give out the room code to anyone Let me know of the following issues: Wireless network latency Workstation unavailability Lack of supplies Hardware issues
6 Tekkotsu Assignments will use Tekkotsu Version A C++ framework for Aibo development (from CMU) Contains many built in features you will need: Color image segmentation Pre-programmed walks To get started, see webpage resource section for: Tutorial on getting setup and compiling a stick Tekkotsu Tutorial
7 Tekkotsu Architecture You will be writing Aibo behaviors in C++ Behaviors Receive events (sensor signals, buttons, images, etc) Create motion commands (motor commands) Can also create events (state transitions) Tekkotsu provides many high level events Color segmented images Blob locations Tekkotsu provides many motion commands Pre-programmed walks Some analogies: Behavior:VisionObject - Agent Sensor Behavior:MotionControl - Agent Effector
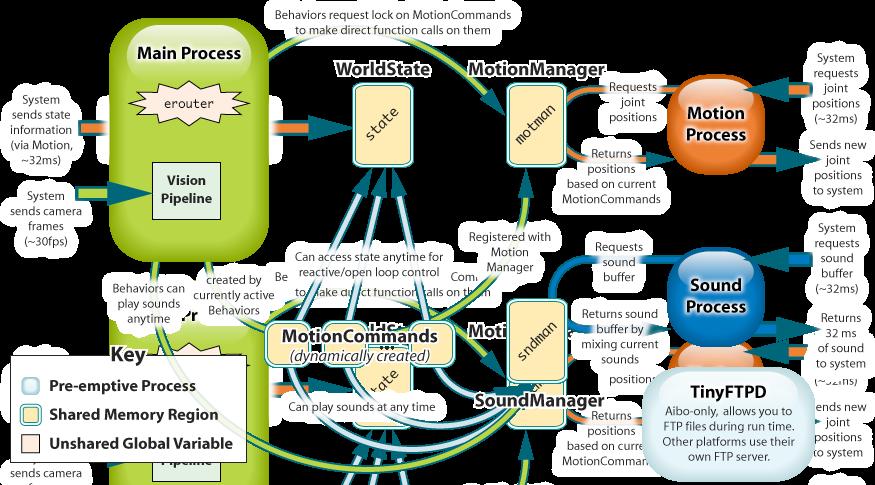
8 Tekkotsu Architecture


9 Tekkotsu Controller GUI Joystick control of walk and head movements View of camera and segmentd image Can start and stop behaviors Can interactively create new poses and motion files
 and 64 MB RAM Communication through wireless LAN")
10 AIBO ERS-7 M3 Multiple Sensors Vision Touch sensors Accelerometers IR, etc Multiple Effectors 4 legs with 3 DOF each Head with 3 DOF Tail, LEDs 64 bit RISC processor (576 MHz) and 64 MB RAM Communication through wireless LAN card
11 Robots Each team locker contains: One Aibo (with memory stick and battery) One charging cradle One Aibo ball You are responsible for returning all these items in working order! Each workstation will have a memstick writer 3 official robot soccer balls are stored in the lab Do not remove!
12 Battery Management A battery will last up to 45 minutes depending on the Aibo's actions May only last 15 minutes when playing soccer Each Aibo has its own charger The Aibo sits on the charger and charges the battery You can charge the Aibo while it is stored in your locker Each robot locker only has one key Coordinate among your team members!
13 Assignment One Goals Establish contact between workstation and Aibo Demonstrate you can read the sensors and display them Make the Aibo move its head and walk Get started using a colored blob tracker on the camera image Write a couple of simple control programs Control the Aibo's gaze to track the ball Walk towards a blue goal Hint: Take a look at the Tekkotsu Tutorial!
14 Assignment One Worth 1 point each: Demonstrate the ability to read and display the changing values from the Aibo's sensors as useful data in your program Same for camera image Demonstrate the ability to detect and track a pink blob in the camera image with the head held still Demonstrate that you can control sitting, standing, and headturning Demonstrate that you can control walking: forward and turning Demonstrate that your Aibo can walk in an arc: forward and turning at the same time Demonstrate that your Aibo can move its head to keep the visible blob from a pink ball near the center of the image Demonstrate that your Aibo can spot a colored patch in the distance and walk towards that patch until it fills half the camera image, and then stop.
15 Assignment One Some hints Good blob identification will be an essential aspect of future assignments Tekkotsu already provides a decent color map However, the chairs sometimes register as pink You can train your own color map edu/~dst/tekkotsu/tutorial/colorsegment.shtml Look at the Tekkotsu tutorial!
16 Assignment One Everything runs on the robot No using the joystick controls You can switch behaviors between evaluations You can also communicate with the robot via touch sensors Evaluations are done in person You will turn in your code and memo
17 Lab Rules Lab environment Food is okay. Mind your drinks near the electronics. Cleanup any mess when you leave. Throw away trash in the garbage cans in the hallway Security Do not leave your robots unattended! Robots can only be used in the lab. They are never allowed to be removed for any reason. If no team members are present, the team's robot must be locked in its locker. Never give your locker key to anyone outside your group. Never tell the door combination to anybody outside of class. Double check that your locker is secure if you are the last of your team to leave. Make sure the lab door locks if you are last to leave. Never give your robotics machine password to anyone. People who are not enrolled in cs393r: May not be in the lab unless a class member accompanies them. Many not use any of the lab computers. May not use any of the robots.
18 Administrative Form a team and fill out a team form You will receive a locker key Lockers already contain Aibo/Charger/Ball/Battery/Memstick
19 Questions?
Multi Robot Localization assisted by Teammate Robots and Dynamic Objects
 Multi Robot Localization assisted by Teammate Robots and Dynamic Objects Anil Kumar Katti Department of Computer Science University of Texas at Austin akatti@cs.utexas.edu ABSTRACT This paper discusses
Multi Robot Localization assisted by Teammate Robots and Dynamic Objects Anil Kumar Katti Department of Computer Science University of Texas at Austin akatti@cs.utexas.edu ABSTRACT This paper discusses
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System Functional Analysis Little Red Team Chankyu Park (Michael) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin System Overview robots, Play a
Team Project: A Surveillant Robot System Functional Analysis Little Red Team Chankyu Park (Michael) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin System Overview robots, Play a
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
Robotic Manipulation Lab 1: Getting Acquainted with the Denso Robot Arms Fall 2010
 15-384 Robotic Manipulation Lab 1: Getting Acquainted with the Denso Robot Arms Fall 2010 due September 23 2010 1 Introduction This lab will introduce you to the Denso robot. You must write up answers
15-384 Robotic Manipulation Lab 1: Getting Acquainted with the Denso Robot Arms Fall 2010 due September 23 2010 1 Introduction This lab will introduce you to the Denso robot. You must write up answers
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
An Open Robot Simulator Environment
 An Open Robot Simulator Environment Toshiyuki Ishimura, Takeshi Kato, Kentaro Oda, and Takeshi Ohashi Dept. of Artificial Intelligence, Kyushu Institute of Technology isshi@mickey.ai.kyutech.ac.jp Abstract.
An Open Robot Simulator Environment Toshiyuki Ishimura, Takeshi Kato, Kentaro Oda, and Takeshi Ohashi Dept. of Artificial Intelligence, Kyushu Institute of Technology isshi@mickey.ai.kyutech.ac.jp Abstract.
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Hanuman KMUTT: Team Description Paper
 Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
NUST FALCONS. Team Description for RoboCup Small Size League, 2011
 1. Introduction: NUST FALCONS Team Description for RoboCup Small Size League, 2011 Arsalan Akhter, Muhammad Jibran Mehfooz Awan, Ali Imran, Salman Shafqat, M. Aneeq-uz-Zaman, Imtiaz Noor, Kanwar Faraz,
1. Introduction: NUST FALCONS Team Description for RoboCup Small Size League, 2011 Arsalan Akhter, Muhammad Jibran Mehfooz Awan, Ali Imran, Salman Shafqat, M. Aneeq-uz-Zaman, Imtiaz Noor, Kanwar Faraz,
Reactive Cooperation of AIBO Robots. Iñaki Navarro Oiza
 Reactive Cooperation of AIBO Robots Iñaki Navarro Oiza October 2004 Abstract The aim of the project is to study how cooperation of AIBO robots could be achieved. In order to do that a specific problem,
Reactive Cooperation of AIBO Robots Iñaki Navarro Oiza October 2004 Abstract The aim of the project is to study how cooperation of AIBO robots could be achieved. In order to do that a specific problem,
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Teleoperated Robot Controlling Interface: an Internet of Things Based Approach
 Proc. 1 st International Conference on Machine Learning and Data Engineering (icmlde2017) 20-22 Nov 2017, Sydney, Australia ISBN: 978-0-6480147-3-7 Teleoperated Robot Controlling Interface: an Internet
Proc. 1 st International Conference on Machine Learning and Data Engineering (icmlde2017) 20-22 Nov 2017, Sydney, Australia ISBN: 978-0-6480147-3-7 Teleoperated Robot Controlling Interface: an Internet
Task Allocation: Role Assignment. Dr. Daisy Tang
 Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
KMUTT Kickers: Team Description Paper
 KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms
 Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
CMDragons 2009 Team Description
 CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Appendix 6 Wireless Interfaces
 Appendix 6 Wireless Interfaces This appendix describes the W800RF32 and MR26 wireless receiver and covers these topics: What are the W800RF32 and the MR26? Use and configuration MR26 W800RF32 Creating
Appendix 6 Wireless Interfaces This appendix describes the W800RF32 and MR26 wireless receiver and covers these topics: What are the W800RF32 and the MR26? Use and configuration MR26 W800RF32 Creating
Find Kick Play An Innate Behavior for the Aibo Robot
 Find Kick Play An Innate Behavior for the Aibo Robot Ioana Butoi 05 Advisors: Prof. Douglas Blank and Prof. Geoffrey Towell Bryn Mawr College, Computer Science Department Senior Thesis Spring 2005 Abstract
Find Kick Play An Innate Behavior for the Aibo Robot Ioana Butoi 05 Advisors: Prof. Douglas Blank and Prof. Geoffrey Towell Bryn Mawr College, Computer Science Department Senior Thesis Spring 2005 Abstract
Programming Design. ROBOTC Software
 Programming Design ROBOTC Software Behavior-Based Programming A behavior is anything your robot does Turning on a single motor or servo Three main types of behaviors 1. Complex behaviors Robot performs
Programming Design ROBOTC Software Behavior-Based Programming A behavior is anything your robot does Turning on a single motor or servo Three main types of behaviors 1. Complex behaviors Robot performs
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it
 MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller.
 This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller. Step : Make sure the KT-X battery is fully charged the controller programs have been uploaded into the
This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller. Step : Make sure the KT-X battery is fully charged the controller programs have been uploaded into the
Photography Department Lab Rules & Information. Open approximately 1 week a er classes begin and closing on the last day of reviews each semester.
 Photography Department Lab Rules & Information Cage Hours Monday-Thursday: 10:00am-9:30pm Friday: 10:00am-5:30pm Saturday: CLOSED Sunday: 1:00-5:30pm Holiday Hours 2:00-9:30pm T: 617.879.7489 Open approximately
Photography Department Lab Rules & Information Cage Hours Monday-Thursday: 10:00am-9:30pm Friday: 10:00am-5:30pm Saturday: CLOSED Sunday: 1:00-5:30pm Holiday Hours 2:00-9:30pm T: 617.879.7489 Open approximately
Quick Guide for. Version 1.0 Hardware setup Forsina Virtual Reality System
 Quick Guide for Version 1.0 Hardware setup Forsina Virtual Reality System Forsina system requirements Recommendation VR hardware specification 1- VR laptops XMG U727 Notebook (high performance VR laptops)
Quick Guide for Version 1.0 Hardware setup Forsina Virtual Reality System Forsina system requirements Recommendation VR hardware specification 1- VR laptops XMG U727 Notebook (high performance VR laptops)
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE
 EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE Mr. Hasani Burns Advisor: Dr. Chutima Boonthum-Denecke Hampton University Abstract This research explores the performance
EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE Mr. Hasani Burns Advisor: Dr. Chutima Boonthum-Denecke Hampton University Abstract This research explores the performance
Input devices and interaction. Ruth Aylett
 Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K.
 Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K. Roberts Page 1 See Appendix A, for Licensing Attribution information
Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K. Roberts Page 1 See Appendix A, for Licensing Attribution information
Programming Design ROBOTC Software
 Programming Design ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. Behavior-Based Programming A behavior is anything your robot does Example: Turn on a single motor or
Programming Design ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. Behavior-Based Programming A behavior is anything your robot does Example: Turn on a single motor or
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize)
 and Darmstadt Dribblers (TeenSize)") Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Release Notes v KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX
 Release Notes v1.1.4 KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX Contents Overview 3 System Requirements 3 Release Notes 4 v1.1.4 4 Release date 4 Software / firmware components release
Release Notes v1.1.4 KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX Contents Overview 3 System Requirements 3 Release Notes 4 v1.1.4 4 Release date 4 Software / firmware components release
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
NimbRo 2005 Team Description
 In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
Running the PR2. Chapter Getting set up Out of the box Batteries and power
 Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
SitiK KIT. Team Description for the Humanoid KidSize League of RoboCup 2010
 SitiK KIT Team Description for the Humanoid KidSize League of RoboCup 2010 Shohei Takesako, Nasuka Awai, Kei Sugawara, Hideo Hattori, Yuichiro Hirai, Takesi Miyata, Keisuke Urushibata, Tomoya Oniyama,
SitiK KIT Team Description for the Humanoid KidSize League of RoboCup 2010 Shohei Takesako, Nasuka Awai, Kei Sugawara, Hideo Hattori, Yuichiro Hirai, Takesi Miyata, Keisuke Urushibata, Tomoya Oniyama,
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Embedded & Robotics Training
 Embedded & Robotics Training WebTek Labs creates and delivers high-impact solutions, enabling our clients to achieve their business goals and enhance their competitiveness. With over 13+ years of experience,
Embedded & Robotics Training WebTek Labs creates and delivers high-impact solutions, enabling our clients to achieve their business goals and enhance their competitiveness. With over 13+ years of experience,
Embedded & Robotics Training
 Embedded & Robotics Training WebTek Labs creates and delivers high-impact solutions, enabling our clients to achieve their business goals and enhance their competitiveness. With over 13+ years of experience,
Embedded & Robotics Training WebTek Labs creates and delivers high-impact solutions, enabling our clients to achieve their business goals and enhance their competitiveness. With over 13+ years of experience,
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Detecting Intra-Room Mobility with Signal Strength Descriptors
 Detecting Intra-Room Mobility with Signal Strength Descriptors Authors: Konstantinos Kleisouris Bernhard Firner Richard Howard Yanyong Zhang Richard Martin WINLAB Background: Internet of Things (Iot) Attaching
Detecting Intra-Room Mobility with Signal Strength Descriptors Authors: Konstantinos Kleisouris Bernhard Firner Richard Howard Yanyong Zhang Richard Martin WINLAB Background: Internet of Things (Iot) Attaching
Team Description for Humanoid KidSize League of RoboCup Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee
 Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Shadowtracker User Manual
 Shadowtracker User Manual Shadowtracker is a helidon housed at the University of Oregon s Baker Lighting Lab College of Architecture and Allied Arts Department of Architecture Designed and constructed
Shadowtracker User Manual Shadowtracker is a helidon housed at the University of Oregon s Baker Lighting Lab College of Architecture and Allied Arts Department of Architecture Designed and constructed
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Part 1: Setting Up Your YouTube Account For Recordings
 Part 1: Setting Up Your YouTube Account For Recordings Before you start your first recording, you will need to make sure that you have a YouTube account setup and ready to upload videos to. Note: You are
Part 1: Setting Up Your YouTube Account For Recordings Before you start your first recording, you will need to make sure that you have a YouTube account setup and ready to upload videos to. Note: You are
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Robotics Engineering DoDEA Career Technology Education Robot Programming
 Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
SIU-CAVE. Cave Automatic Virtual Environment. Project Design. Version 1.0 (DRAFT) Prepared for. Dr. Christos Mousas JBU.
 Prepared for. Dr. Christos Mousas JBU.") SIU-CAVE Cave Automatic Virtual Environment Project Design Version 1.0 (DRAFT) Prepared for Dr. Christos Mousas By JBU on March 2nd, 2018 SIU CAVE Project Design 1 TABLE OF CONTENTS -Introduction 3 -General
SIU-CAVE Cave Automatic Virtual Environment Project Design Version 1.0 (DRAFT) Prepared for Dr. Christos Mousas By JBU on March 2nd, 2018 SIU CAVE Project Design 1 TABLE OF CONTENTS -Introduction 3 -General
Robot Autonomous and Autonomy. By Noah Gleason and Eli Barnett
 Robot Autonomous and Autonomy By Noah Gleason and Eli Barnett Summary What do we do in autonomous? (Overview) Approaches to autonomous No feedback Drive-for-time Feedback Drive-for-distance Drive, turn,
Robot Autonomous and Autonomy By Noah Gleason and Eli Barnett Summary What do we do in autonomous? (Overview) Approaches to autonomous No feedback Drive-for-time Feedback Drive-for-distance Drive, turn,
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
VoIP Paging Amplifier and Elastix Server
 VoIP Paging Amplifier and Elastix Server Setup Guide http://www.elastix.org 1.0 Setup Diagram Figure 1-1 is a setup diagram for a single VoIP Paging Amplifier configuration. In this configuration, the
VoIP Paging Amplifier and Elastix Server Setup Guide http://www.elastix.org 1.0 Setup Diagram Figure 1-1 is a setup diagram for a single VoIP Paging Amplifier configuration. In this configuration, the
Have you ever had one of the following situations happen in your photography endeavors?
 Image Stacking by Joe Wenninger I decided to write this article myself after having issues trying to do a Median blending technique from a book about Photoshop. You needed to have the extended version
Image Stacking by Joe Wenninger I decided to write this article myself after having issues trying to do a Median blending technique from a book about Photoshop. You needed to have the extended version
E11 Lecture 13: Feedback Control. Profs. David Money Harris & Sarah Harris Fall 2011
 E11 Lecture 13: Feedback Control Profs. David Money Harris & Sarah Harris Fall 2011 1 Coming Up in E11 This week s lab: line-following robot completed in teams (within same lab session) After fall break:
E11 Lecture 13: Feedback Control Profs. David Money Harris & Sarah Harris Fall 2011 1 Coming Up in E11 This week s lab: line-following robot completed in teams (within same lab session) After fall break:
Installation Manual. Ultra RF Analogue Transmitter QC0168. Manual Ref: QC0168. Version: March
 Installation Manual Ultra RF Analogue Transmitter QC0168 Manual Ref: QC0168 Version: March 17 1.0 System Concept RF Transmitters connect to sensors or meters and send data to the infrastructure internet
Installation Manual Ultra RF Analogue Transmitter QC0168 Manual Ref: QC0168 Version: March 17 1.0 System Concept RF Transmitters connect to sensors or meters and send data to the infrastructure internet
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
2 Our Hardware Architecture
 RoboCup-99 Team Descriptions Middle Robots League, Team NAIST, pages 170 174 http: /www.ep.liu.se/ea/cis/1999/006/27/ 170 Team Description of the RoboCup-NAIST NAIST Takayuki Nakamura, Kazunori Terada,
RoboCup-99 Team Descriptions Middle Robots League, Team NAIST, pages 170 174 http: /www.ep.liu.se/ea/cis/1999/006/27/ 170 Team Description of the RoboCup-NAIST NAIST Takayuki Nakamura, Kazunori Terada,
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016
 WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
TurboVUi Solo. User Guide. For Version 6 Software Document # S Please check the accompanying CD for a newer version of this document
 TurboVUi Solo For Version 6 Software Document # S2-61432-604 Please check the accompanying CD for a newer version of this document Remote Virtual User Interface For MOTOTRBO Professional Digital 2-Way
TurboVUi Solo For Version 6 Software Document # S2-61432-604 Please check the accompanying CD for a newer version of this document Remote Virtual User Interface For MOTOTRBO Professional Digital 2-Way
ECE 497 Introduction to Mobile Robotics Spring 09-10
 Lab 1 Getting to Know Your Robot: Locomotion and Odometry (Demonstration due in class on Thursday) (Code and Memo due in Angel drop box by midnight on Thursday) Read this entire lab procedure and complete
Lab 1 Getting to Know Your Robot: Locomotion and Odometry (Demonstration due in class on Thursday) (Code and Memo due in Angel drop box by midnight on Thursday) Read this entire lab procedure and complete
UChile RoadRunners 2009 Team Description Paper
 UChile RoadRunners 2009 Team Description Paper Javier Ruiz-del-Solar, Isao Parra, Luis A. Herrera, Javier Moya, Daniel Schulz, Daniel Hermman, Pablo Guerrero, Javier Testart, Paul Vallejos, Rodrigo Asenjo
UChile RoadRunners 2009 Team Description Paper Javier Ruiz-del-Solar, Isao Parra, Luis A. Herrera, Javier Moya, Daniel Schulz, Daniel Hermman, Pablo Guerrero, Javier Testart, Paul Vallejos, Rodrigo Asenjo
CMRoboBits: Creating an Intelligent AIBO Robot
 CMRoboBits: Creating an Intelligent AIBO Robot Manuela Veloso, Scott Lenser, Douglas Vail, Paul Rybski, Nick Aiwazian, and Sonia Chernova - Thanks to James Bruce Computer Science Department Carnegie Mellon
CMRoboBits: Creating an Intelligent AIBO Robot Manuela Veloso, Scott Lenser, Douglas Vail, Paul Rybski, Nick Aiwazian, and Sonia Chernova - Thanks to James Bruce Computer Science Department Carnegie Mellon
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
EROS TEAM. Team Description for Humanoid Kidsize League of Robocup2013
 EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
Building an autonomous light finder robot
 LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
6NAVY LANGUAGE ARTS Expectations & Guidelines for
 NAVY TEAM 2017-18 SCHOOL YEAR PAGE 1 6NAVY LANGUAGE ARTS Expectations & Guidelines for 2017-18 Dear Students, Welcome to Room 202! I know that some of you may be feeling a bit nervous or overwhelmed with
NAVY TEAM 2017-18 SCHOOL YEAR PAGE 1 6NAVY LANGUAGE ARTS Expectations & Guidelines for 2017-18 Dear Students, Welcome to Room 202! I know that some of you may be feeling a bit nervous or overwhelmed with
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
The activity looks at a sequence of growing patterns using sticks and blobs.
 Sticks and Blobs Key words: sequence, term Objectives Solve word problems and investigate in a range of contexts. Generate and describe sequences. Generate terms of a sequence using term-to-term and position-to-term
Sticks and Blobs Key words: sequence, term Objectives Solve word problems and investigate in a range of contexts. Generate and describe sequences. Generate terms of a sequence using term-to-term and position-to-term
Limits of a Distributed Intelligent Networked Device in the Intelligence Space. 1 Brief History of the Intelligent Space
 Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Fresh from the boat: Great Duck Island habitat monitoring. Robert Szewczyk Joe Polastre Alan Mainwaring June 18, 2003
 Fresh from the boat: Great Duck Island habitat monitoring Robert Szewczyk Joe Polastre Alan Mainwaring June 18, 2003 Outline Application overview System & node evolution Status & preliminary evaluations
Fresh from the boat: Great Duck Island habitat monitoring Robert Szewczyk Joe Polastre Alan Mainwaring June 18, 2003 Outline Application overview System & node evolution Status & preliminary evaluations
TM5. Guide Book. Hardware Version: 2.00 Software Version: 1.62
 TM5 Guide Book Hardware Version: 2.00 Software Version: 1.62 ii Release Date : 2017-07-10 The information contained herein is the property of Techman Robot Corporation (hereinafter referred to as the Corporation).
TM5 Guide Book Hardware Version: 2.00 Software Version: 1.62 ii Release Date : 2017-07-10 The information contained herein is the property of Techman Robot Corporation (hereinafter referred to as the Corporation).
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Easy Robot Software. And the MoveIt! Setup Assistant 2.0. Dave Coleman, PhD davetcoleman
 Easy Robot Software And the MoveIt! Setup Assistant 2.0 Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study David Coleman, Ioan Sucan, Sachin Chitta, Nikolaus Correll Journal
Easy Robot Software And the MoveIt! Setup Assistant 2.0 Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study David Coleman, Ioan Sucan, Sachin Chitta, Nikolaus Correll Journal
Challenging areas:- Hand gesture recognition is a growing very fast and it is I. INTRODUCTION
 Hand gesture recognition for vehicle control Bhagyashri B.Jakhade, Neha A. Kulkarni, Sadanand. Patil Abstract: - The rapid evolution in technology has made electronic gadgets inseparable part of our life.
Hand gesture recognition for vehicle control Bhagyashri B.Jakhade, Neha A. Kulkarni, Sadanand. Patil Abstract: - The rapid evolution in technology has made electronic gadgets inseparable part of our life.
Set Up Your Domain Here
 Roofing Business BLUEPRINT WordPress Plugin Installation & Video Walkthrough Version 1.0 Set Up Your Domain Here VIDEO 1 Introduction & Hosting Signup / Setup https://s3.amazonaws.com/rbbtraining/vid1/index.html
Roofing Business BLUEPRINT WordPress Plugin Installation & Video Walkthrough Version 1.0 Set Up Your Domain Here VIDEO 1 Introduction & Hosting Signup / Setup https://s3.amazonaws.com/rbbtraining/vid1/index.html
Project Description. Multispectral Image Capture System The Sixth Sensor
 Project Description Multispectral Image Capture System The Sixth Sensor Jocelyn Ramirez, Javier Hernandez, Yu-Cheol Shin, Jonathan Terry, Chris Inderwiesche Revision History: Intro: 2/25/15-20 Use Cases/User
Project Description Multispectral Image Capture System The Sixth Sensor Jocelyn Ramirez, Javier Hernandez, Yu-Cheol Shin, Jonathan Terry, Chris Inderwiesche Revision History: Intro: 2/25/15-20 Use Cases/User
Multi-Humanoid World Modeling in Standard Platform Robot Soccer
 Multi-Humanoid World Modeling in Standard Platform Robot Soccer Brian Coltin, Somchaya Liemhetcharat, Çetin Meriçli, Junyun Tay, and Manuela Veloso Abstract In the RoboCup Standard Platform League (SPL),
Multi-Humanoid World Modeling in Standard Platform Robot Soccer Brian Coltin, Somchaya Liemhetcharat, Çetin Meriçli, Junyun Tay, and Manuela Veloso Abstract In the RoboCup Standard Platform League (SPL),
MCT Susanoo Logics 2014 Team Description
 MCT Susanoo Logics 2014 Team Description Satoshi Takata, Yuji Horie, Shota Aoki, Kazuhiro Fujiwara, Taihei Degawa Matsue College of Technology 14-4, Nishiikumacho, Matsue-shi, Shimane, 690-8518, Japan
MCT Susanoo Logics 2014 Team Description Satoshi Takata, Yuji Horie, Shota Aoki, Kazuhiro Fujiwara, Taihei Degawa Matsue College of Technology 14-4, Nishiikumacho, Matsue-shi, Shimane, 690-8518, Japan
Parts of a Lego RCX Robot
 Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
EITN90 Radar and Remote Sensing Lab 2
 EITN90 Radar and Remote Sensing Lab 2 February 8, 2018 1 Learning outcomes This lab demonstrates the basic operation of a frequency modulated continuous wave (FMCW) radar, capable of range and velocity
EITN90 Radar and Remote Sensing Lab 2 February 8, 2018 1 Learning outcomes This lab demonstrates the basic operation of a frequency modulated continuous wave (FMCW) radar, capable of range and velocity
Extending Tekkotsu to New Platforms for Cognitive Robotics
 Proceedings of the AAAI-07 Mobile Robots Workshop, July 2007, Vancouver, Canada. 1 Extending Tekkotsu to New Platforms for Cognitive Robotics Ethan J. Tira-Thompson Robotics Institute Carnegie Mellon University
Proceedings of the AAAI-07 Mobile Robots Workshop, July 2007, Vancouver, Canada. 1 Extending Tekkotsu to New Platforms for Cognitive Robotics Ethan J. Tira-Thompson Robotics Institute Carnegie Mellon University
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation