Dipartimento di Elettronica Informazione e Bioingegneria Robotics
|
|
|
- Solomon Stanley
- 5 years ago
- Views:
Transcription




1 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral 2014

2 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote the scientific study of behavior. ( J. Watson 1913 ) 1. Psychology is the science of behavior. Psychology is not the science of mind. 2. Behavior can be described and explained without making ultimate reference to mental events or to internal psychological processes. The sources of behavior are external (in the environment), not internal (in the mind).


3 Change in prospective reasoning Where: brain Artificial Intelligence Information processing Absolute coordinates behave Where: organism Artificial Life Senso-motor integration Agent-centered

4 Behaviorism in robotics Embodied (= intrasomatico) Behaviour-based robotics Some inspiration from biology Reaching a goal depends on the environment Sensor data should be used directly to guide the robot motion There is no need of symbolic reasoning and global mapping Intelligence without representation and reasoning (Brooks, 1986)
5 Symbol Grounding Hypothesis Symbol system: no embodiment Symbol grounding No symbols, No symbolic relations No automatic problem solution No state space 4 properties of autonomous robots 1. Situateness, 2. Embodiment 3. Intelligence 4. Emergence
6 1. Situatedness The behavior of a creature depends on the environment in which it is embedded or situated. Creatures don t deal with abstract descriptions, but with the here and now of their environment A situated automaton is a finite-state machine whose inputs are provided by sensors connected to the environment, and whose outputs are connected to effectors.
7 2 Embodiment An embodied creature is one which has a physical body and experiences the world, at least in part, directly through the influence of the world on that body. The actions of a creature are part of a dynamic with the world and have immediate feedback on the creature s own sensations through direct physical coupling and its consequences. Only an embodied agent is validated as one that can deal with real world. Only through a physical grounding can any internal symbolic system be given meaning.
8 3 Emergence The intelligence of the system emerges from the system s interactions with the world and from sometimes indirect interactions between its components-- it is sometimes hard to point to one event or place within the system and say that is why some external action was manifested.
9 4 intelligence An autonomous (artificial) creature is one that is able to maintain a long term dynamic with its environment without intervention. Once an autonomous artificial creature is switched on, it does what is in its nature to do. Intelligence is in the eye of the observer.
10 Horizontal/vertical decomposition Shakey..but Perception takes too long Perception is not a solved problem Modeling/planning component assumes complete models are available Overall system cannot respond in real-time Most robots built this way have failed ambient
11 Behavior-based Approach Decompose overall control system into a layered set of reactive behaviors Each behavior represents a complete mapping from sensors to motor commands Low-level behaviors (e.g. avoid) run in real-time since they use little computation High-level behaviors are invoked only when necessary Requires arbitration strategy to choose among (or combine) conflicting behaviors
12 Complex behaviors from simple controls Complex and useful behavior need not necessarily be a product of an extremely complex control system Absolute coordinate systems are a source of error relational maps are more useful to a mobile robot For robustness, the robot must be able to function when one or more of its sensors fails recovery should be quick robots should be autonomous and self-sustaining
13 Subsumption a complex system has precursor in a simpler one The offspring contains the same mechanisms of the father with something more The offspring sussumes the father mechanisms layer 1 layer 2 layer 1
14 Subsumption architecture Each level sussumes as a subsystem the previous level
15 Subsumption: AFMS each module is implemented as a finite state machine augmented with some instance variables A finite state machine has - a set of states - a start state; (one or more stop states) - a set of symbols -a set of transitions switch bad on switch
16 Subsumption : Network Construction 1) Computation is organized as an asynchronous network of active computational elements(afsm) with a fixed topology of unidirectional connections. 2) Messages sent over connections have no implicit semantics they are small numbers (few bits), their meanings are dependent on the dynamics designed into both the sender and receiver 3) Sensors and actuators are connected to this network usually through asynchronous two-sided buffers. Only internal timers
17 control The control system is broken down into behaviors that run in parallel each behavior has direct access to sensor readings and can control the robot s motors directly observe changes build maps sense explore wander avoid objects act
18 communication Communication between modules is fixed module 1 module 2 module 3 3 ways to modify it monitoring inhibition suppression
19 Monitoring inhibition suppression The new layer monitors the messages between the modules of the previous layer using the same connection module3 new layer old layer module1 module2 Can inhibit the communication for 40 ms module3 new layer old layer module1 I module2 Can substitute the message for a limited time (40 ms) new layer old layer module3 module1 S module2
20 AFSM = a set of registers A virtual processor that executes a (set of) rules 4 states: Output Side effect Event wait Conditional dispatch some AFSM are directly connected to the robot hardware Sensors can store data in their registers Some output are directly sent to actuators
21 Behavior activation 1. Direct message through defined connections (and I and S nodes) 2. Activation propagation: when the messages received are more than a threshold, the behavior is activated 3. Ormonal system: defines expressions (condition monitors) as function of time, and releasers as functions of monitors. When evaluated in the activation slot of a behavior, their value can be checked against a threshold to activate the behavior.
22 Behavior Design Behavior design is more an art than a science In what situation does the behavior apply? What is the result of the behavior? Robustness? Scalability? Good behaviors produce smoothly varying control signals Emergent behavior is difficult to predict
23 Developing subsumption systems Decide sensors and actuators. Define first system. Add over the existent. Situation n STAGE n OK SYSTEM Situation 2 STAGE 2 OK STAGE 2 OK Situation 1 STAGE 1 STAGE 1 OK OK STAGE 1 OK time 0 Step 1 Step 2 Step n Result

24 Example: Allen ALLEN, Brooks 1986
25 step 1 Il robot moves only forward Forward Forward forward forward Left motor Right motor

26 step 2 A new layer to look for obstacles. If obstacle detected, one wheel moves backward tpo change direction. Detection obstacle Avoid backward backward Forward forward S Left motor Forward forward S Right motor
27 step 3 To avoid that the robot continues to move in a small region, a new level will introduce random phantoms to make the robot to change direction Random trigger Turn random phantom obstacle Detection S obstacle Avoid backward backward Forward forward S Left motor Forward forward S Right motor
28 step 4 To follow a wanted direction, we control the phantom obstacle Compass direction Transfer path Explorer controlled phantom obstacle Random trigger Turn S random phantom obstacle Detection S obstacle Avoid backward backward Forward forward S Left motor Forward forward S Right motor
29 step 5 Land marks obstacle goal user goal Navigate intended path find landmarks. The user sends a direction, the robot moves toward the landmark Compass direction Transfer S path Explorer controlled phantom obstacle Random trigger Turn S random phantom obstacle Detection S obstacle Avoid backward backward Forward forward S Left motor Forward forward S Right motor


30 Example: herbert MIT AI Lab in 1988 Primary Goal To wander in the office following walls and avoiding obstacles Look for soda-like objects, pick it up and drop it at a base location Sensors vision and a laser striper to find soda cans, and sonars and IRs to wander around safely.
31 Herbert Behavior Herbert Behavior search for soda cans; When found grab it, pick it up, weigh it,... if heavy (full), put it down, if empty, pick it up, and head home. There is no internal wire between the AFSMs that achieve can finding, grabbing, arm tucking, and going home. The relevant parts of the control system interact and activate each other through sensing the world.
32 Level 1
33 Level 1 wander
34 Level 2 Grabber Pathplan Straighten Monitor Integrate
35 Grasping - Sensors Sensors in the hand Crossed IR sensor Finger Beam Tip switches Wrist switch
36 Grasping Cans Case 1: Can already between the fingers Identified by the finger beam It grips everything that can be placed between the fingers Case 2: Can placed in front of the hand Crossed IR beam identifies the object Extend arm till the finger beam is activated Hand can knock over the object Lift the hand Case 3: Can is some distance away from hand search for can near the surface than a few feet above Cruise the surface where can is placed Once IR detects a can, grab it
37 Grasping Cans ENGRADE & DESCENT Locate table BOUNCE & SURFACE Cruise over the surface OVER & EXTEND Position the hand to grab GRASP Grab the can HOIST & PARK Bring the can closer to body
38 Behavior Low Level capabilities Obstacle avoidance Wall following Real-time recognition of soda can-like objects and desk-like objects (Does not explain how it determines if the can is empty)


39 Hoser shoot people 3 behaviors: Wander, Locate, Shoot Wander go around to find a person uses IR when found go to Locate Locate orient the arm towards the person, then go to Shoot Shoot shoot (water) every 0.1 seconds for a given time, maintaining the person at center. Then go to wander and suppress for a few seconds the locate mode
40 Genghis Genghis is a 1Kg six legged robot (1989) 12 motors, 12 force sensors, 1 inclinometer, 2 whiskers in front for obstacle, IR sensor in front Alpha advancing Beta - lifting
41 Genghis behaviors Level 1: standup 2 modules per leg; control alpha (advance) & beta (balance) motor Level 2: simple walk does not compensate for rough terrain Level 3: force balancing Compensates for rough terrain Level 4: leg lifting Level 5: whiskers
42 Walking with six legs Walk Up leg trigger leg down S beta position
43 Equilibrium of the legs alpha advance alpha balance S alpha position Alpha balance tries to make the sum of the alpha angles = 0
44 Walking Walk Up leg trigger leg down S beta pos alpha advance alpha balance S alpha pos
45 Walking in rough terrain Walk Up leg trigger Alpha collision leg down S beta pos alpha advance alpha balance S alpha pos
 Move until stuck is activated (unwedger) If in stuck move to go")
46 Obelix and learning Obelix has to push boxes against the walls 3 behaviors Mahadevan, Connell, IBM, 1991 (finder) Move using sonars until bump is activated (pusher) Move until stuck is activated (unwedger) If in stuck move to go away
47 Obelix sensors The activating conditions of the behaviors contains sensor data from Sonar go where an object can be found infrared verify the object is near and can start pushing motor current, to verify if stuck bump, to detect contact
48 subsumption advantages Provides a way to incrementally build and test a complex mobile robot control system Supports parallel computation in a straightforward, intuitive way Avoids centralized control; relies on self-centered and autonomous modules Leads to more emergent behavior -- Complex (and useful) behavior may simply be the reflection of a complex environment
49 Subsumption criticisms More complex behaviors? Is it an evolution? in the development of an individual, new representational structures are developed in response to the environment, not added by an experimenter. It would be more impressive if the robot learnt new behavior modules in response to the environment. Emphasis in this approach on reacting to the environment. But representations are needed for more complex tasks.
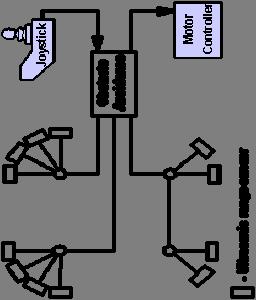
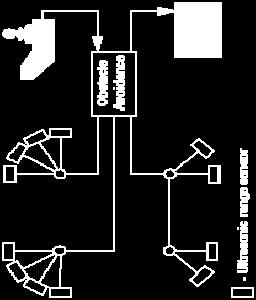
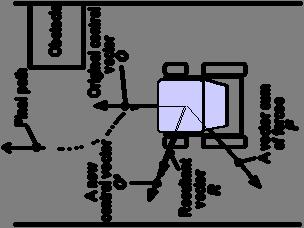
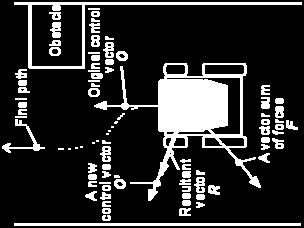

50 Schema+potential method Integrates joystick controller with potential method (the 2 vectors sum)
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Control Arbitration. Oct 12, 2005 RSS II Una-May O Reilly
 Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
Embodiment from Engineer s Point of View
 New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Robot Architectures. Prof. Holly Yanco Spring 2014
 Robot Architectures Prof. Holly Yanco 91.450 Spring 2014 Three Types of Robot Architectures From Murphy 2000 Hierarchical Organization is Horizontal From Murphy 2000 Horizontal Behaviors: Accomplish Steps
Robot Architectures Prof. Holly Yanco 91.450 Spring 2014 Three Types of Robot Architectures From Murphy 2000 Hierarchical Organization is Horizontal From Murphy 2000 Horizontal Behaviors: Accomplish Steps
Robot Architectures. Prof. Yanco , Fall 2011
 Robot Architectures Prof. Holly Yanco 91.451 Fall 2011 Architectures, Slide 1 Three Types of Robot Architectures From Murphy 2000 Architectures, Slide 2 Hierarchical Organization is Horizontal From Murphy
Robot Architectures Prof. Holly Yanco 91.451 Fall 2011 Architectures, Slide 1 Three Types of Robot Architectures From Murphy 2000 Architectures, Slide 2 Hierarchical Organization is Horizontal From Murphy
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
ARTIFICIAL INTELLIGENCE-THE NEXT LEVEL
 ARTIFICIAL INTELLIGENCE-THE NEXT LEVEL www.technicalpapers.co.nr ABSTRACT ARTIFICIAL INTELLIGENCE-THE NEXT LEVEL The term Artificial Intelligence (AI) refers to "the science and engineering of making intelligent
ARTIFICIAL INTELLIGENCE-THE NEXT LEVEL www.technicalpapers.co.nr ABSTRACT ARTIFICIAL INTELLIGENCE-THE NEXT LEVEL The term Artificial Intelligence (AI) refers to "the science and engineering of making intelligent
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Artificial Intelligence
 Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
ES 492: SCIENCE IN THE MOVIES
 UNIVERSITY OF SOUTH ALABAMA ES 492: SCIENCE IN THE MOVIES LECTURE 5: ROBOTICS AND AI PRESENTER: HANNAH BECTON TODAY'S AGENDA 1. Robotics and Real-Time Systems 2. Reacting to the environment around them
UNIVERSITY OF SOUTH ALABAMA ES 492: SCIENCE IN THE MOVIES LECTURE 5: ROBOTICS AND AI PRESENTER: HANNAH BECTON TODAY'S AGENDA 1. Robotics and Real-Time Systems 2. Reacting to the environment around them
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
STRATEGO EXPERT SYSTEM SHELL
 STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
Emergent Behavior Robot
 Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Keywords Multi-Agent, Distributed, Cooperation, Fuzzy, Multi-Robot, Communication Protocol. Fig. 1. Architecture of the Robots.
 1 José Manuel Molina, Vicente Matellán, Lorenzo Sommaruga Laboratorio de Agentes Inteligentes (LAI) Departamento de Informática Avd. Butarque 15, Leganés-Madrid, SPAIN Phone: +34 1 624 94 31 Fax +34 1
1 José Manuel Molina, Vicente Matellán, Lorenzo Sommaruga Laboratorio de Agentes Inteligentes (LAI) Departamento de Informática Avd. Butarque 15, Leganés-Madrid, SPAIN Phone: +34 1 624 94 31 Fax +34 1
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE. G. Pires, U. Nunes, A. T. de Almeida
 ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE G. Pires, U. Nunes, A. T. de Almeida Institute of Systems and Robotics Department of Electrical Engineering University of Coimbra, Polo II 3030
ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE G. Pires, U. Nunes, A. T. de Almeida Institute of Systems and Robotics Department of Electrical Engineering University of Coimbra, Polo II 3030
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
A Flexible and Innovative Platform for Autonomous Mobile Robots
 A Flexible and Innovative Platform for Autonomous Mobile Robots Jessica Howe January 10, 2003 1 Introduction In building a new system for control and morphological design of autonomous mobile robots one
A Flexible and Innovative Platform for Autonomous Mobile Robots Jessica Howe January 10, 2003 1 Introduction In building a new system for control and morphological design of autonomous mobile robots one
Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller
 From:MAICS-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller Douglas S. Blank and J. Oliver
From:MAICS-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller Douglas S. Blank and J. Oliver
Small Planetary Rovers
 Small Planetary Rovers Colin M. Angle and Rodney A. Brooks MIT Artificial Intelligence Lab 1 Cambridge, MA, USA April 27, 1990 IEEE International Workshop on Intelligent Robots and Systems IROS '90 1 Introduction
Small Planetary Rovers Colin M. Angle and Rodney A. Brooks MIT Artificial Intelligence Lab 1 Cambridge, MA, USA April 27, 1990 IEEE International Workshop on Intelligent Robots and Systems IROS '90 1 Introduction
A User Friendly Software Framework for Mobile Robot Control
 A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Machine Intelligence Laboratory
 Introduction Robot Control There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Introduction Robot Control There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Robot Control. Robot Control
 Robot Control Introduction There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Robot Control Introduction There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Robots in the Loop: Supporting an Incremental Simulation-based Design Process
 s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Initial Report on Wheelesley: A Robotic Wheelchair System
 Initial Report on Wheelesley: A Robotic Wheelchair System Holly A. Yanco *, Anna Hazel, Alison Peacock, Suzanna Smith, and Harriet Wintermute Department of Computer Science Wellesley College Wellesley,
Initial Report on Wheelesley: A Robotic Wheelchair System Holly A. Yanco *, Anna Hazel, Alison Peacock, Suzanna Smith, and Harriet Wintermute Department of Computer Science Wellesley College Wellesley,
Prof. Emil M. Petriu 17 January 2005 CEG 4392 Computer Systems Design Project (Winter 2005)
") Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
VOICE CONTROL BASED PROSTHETIC HUMAN ARM
 VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Artificial Intelligence Game Playing/Robotics
 Artificial Intelligence Game Playing/Robotics Course 254482 Lecturer : Sukchatri PRASOMSUK University of Phayao, ICT Slide by Jeremy Gow Department of Computing, Imperial College, London Two Player Games
Artificial Intelligence Game Playing/Robotics Course 254482 Lecturer : Sukchatri PRASOMSUK University of Phayao, ICT Slide by Jeremy Gow Department of Computing, Imperial College, London Two Player Games
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS. Bruce Turner Intelligent Machine Design Lab Summer 1999
 GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks
 Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
Using Reactive and Adaptive Behaviors to Play Soccer
 AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
GA-based Learning in Behaviour Based Robotics
 Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
II. ROBOT SYSTEMS ENGINEERING
 Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation
 Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation Stefania Bandini, Andrea Bonomi, Giuseppe Vizzari Complex Systems and Artificial Intelligence research
Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation Stefania Bandini, Andrea Bonomi, Giuseppe Vizzari Complex Systems and Artificial Intelligence research
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Introduction to Embedded and Real-Time Systems W10: Hardware Design Choices and Basic Control Architectures for Mobile Robots
 Introduction to Embedded and Real-Time Systems W10: Hardware Design Choices and Basic Control Architectures for Mobile Robots Outline Hardware design choices Hardware resource management Introduction to
Introduction to Embedded and Real-Time Systems W10: Hardware Design Choices and Basic Control Architectures for Mobile Robots Outline Hardware design choices Hardware resource management Introduction to
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing
 Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System Functional Analysis Little Red Team Chankyu Park (Michael) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin System Overview robots, Play a
Team Project: A Surveillant Robot System Functional Analysis Little Red Team Chankyu Park (Michael) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin System Overview robots, Play a
Homeostasis Lighting Control System Using a Sensor Agent Robot
 Intelligent Control and Automation, 2013, 4, 138-153 http://dx.doi.org/10.4236/ica.2013.42019 Published Online May 2013 (http://www.scirp.org/journal/ica) Homeostasis Lighting Control System Using a Sensor
Intelligent Control and Automation, 2013, 4, 138-153 http://dx.doi.org/10.4236/ica.2013.42019 Published Online May 2013 (http://www.scirp.org/journal/ica) Homeostasis Lighting Control System Using a Sensor
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Session 11 Introduction to Robotics and Programming mbot. >_ {Code4Loop}; Roochir Purani
 Session 11 Introduction to Robotics and Programming mbot >_ {Code4Loop}; Roochir Purani RECAP from last 2 sessions 3D Programming with Events and Messages Homework Review /Questions Understanding 3D Programming
Session 11 Introduction to Robotics and Programming mbot >_ {Code4Loop}; Roochir Purani RECAP from last 2 sessions 3D Programming with Events and Messages Homework Review /Questions Understanding 3D Programming
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Distributed Control of Multi-Robot Teams: Cooperative Baton Passing Task
 Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Scheduling and Motion Planning of irobot Roomba
 Scheduling and Motion Planning of irobot Roomba Jade Cheng yucheng@hawaii.edu Abstract This paper is concerned with the developing of the next model of Roomba. This paper presents a new feature that allows
Scheduling and Motion Planning of irobot Roomba Jade Cheng yucheng@hawaii.edu Abstract This paper is concerned with the developing of the next model of Roomba. This paper presents a new feature that allows
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition
 On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
Today s Menu. Near Infrared Sensors
 Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Agents in the Real World Agents and Knowledge Representation and Reasoning
 Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell
 Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell 2004.12.01 Abstract I propose to develop a comprehensive and physically realistic virtual world simulator for use with the Swarthmore Robotics
Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell 2004.12.01 Abstract I propose to develop a comprehensive and physically realistic virtual world simulator for use with the Swarthmore Robotics
soccer game, we put much more emphasis on making a context that immediately would allow the public audience to recognise the game to be a soccer game.
 Robot Soccer with LEGO Mindstorms Henrik Hautop Lund Luigi Pagliarini LEGO Lab University of Aarhus, Aabogade 34, 8200 Aarhus N., Denmark hhl@daimi.aau.dk http://www.daimi.aau.dk/~hhl/ Abstract We have
Robot Soccer with LEGO Mindstorms Henrik Hautop Lund Luigi Pagliarini LEGO Lab University of Aarhus, Aabogade 34, 8200 Aarhus N., Denmark hhl@daimi.aau.dk http://www.daimi.aau.dk/~hhl/ Abstract We have
Mechatronics 19 (2009) Contents lists available at ScienceDirect. Mechatronics. journal homepage:
 Contents lists available at ScienceDirect. Mechatronics. journal homepage:") Mechatronics 19 (2009) 463 470 Contents lists available at ScienceDirect Mechatronics journal homepage: www.elsevier.com/locate/mechatronics A cooperative multi-robot architecture for moving a paralyzed
Mechatronics 19 (2009) 463 470 Contents lists available at ScienceDirect Mechatronics journal homepage: www.elsevier.com/locate/mechatronics A cooperative multi-robot architecture for moving a paralyzed
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction