Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
|
|
|
- Kory Fleming
- 5 years ago
- Views:
Transcription
1 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand



2 Click to add Text Robot?




3 Click to add Text Robot?
4 How do we categorize these robots? What they can do? Most robots can move things (but varying distances) What sensors they have? We can generally equip any robot with any type of sensor. How they move Yes! The motion properties of an arm is different from a mobile robot/car and a UAV/helicopter



5 Mobile Robots (ground) Moves on 2D ground surface Needs just 2 motors Inexpensive Easy to model and control Large range of motion Hard to exactly localize Cannot generally pick things up and manipulate them
 Moves in 6DOF")
 Min 6 motors")

6 Robot arms and hands (linkages) Moves in 6DOF (3D position, 3D orientation) Min 6 motors in linkage Perfect localization Expensive Easy to control Manipulates!
 Generally underactuated (4DOF)")

7 Free-flying robots Aerial and Underwater Moves in 6DOF (3D position, 3D orientation) Generally underactuated (4DOF) Hard to model and control User error = Crash and break Hard to exactly localize RC heli inexpesive, Military UAV expensive
8 Parts of a Robot Motors Motor controllers Transmission Linkages Sensors Computer



9 Example Software and Hardware Block Diagram One of our robots in Western Canadian Robot Games May 2012 Hardware: Software: Python and ROS processes (u,v) Video Tracking

10 Motors Regular brushed DC motors RC servo motors BLDC motors


11 RC Servo Motors Is a brushed motor+ gearbox+control electronics Does one revolution Can modify for more by removing electronics and cutting stop tab


12 RC Servo motors potentiometer Direct position control in response to the width of a regularly sent pulse. A potentiometer is used to determine the motor shaft angle. modified to run continuously

13 BLDC Motors Inexpensive Powerful Precise Used in newer commercial arms But: Need 3Phase controller

14 Transmission Gears Most common in industrial robots Friction and backlash/deadzone Geared servo motor Puma 560 joint 3 gears and shafts


15 Transmission Timing/toothed belts Common in one-off robots Less stiff Beebcontrol Alfred

16 Transmission Steel cables/tendons Both light and stiff Wear quicker WAM: cables connect motors in base to joints in arm



17 Transmission Gears Cables/tendons Belts Beebcontrol Alfred



18 Linkage configuration Motors serially in arm Each motor carries the weight of previous Heavy Motors at base Lightweight and faster More complex transmission Pic of our small arm


19 Aluminum profiles Linkage Material


20 Aluminum profiles Linkage Material


21 Wood Linkage Material


22 Linkage Material Wood M. Quigley, R. Brewer, A. Y. Ng, K Salisbury, Stanford University

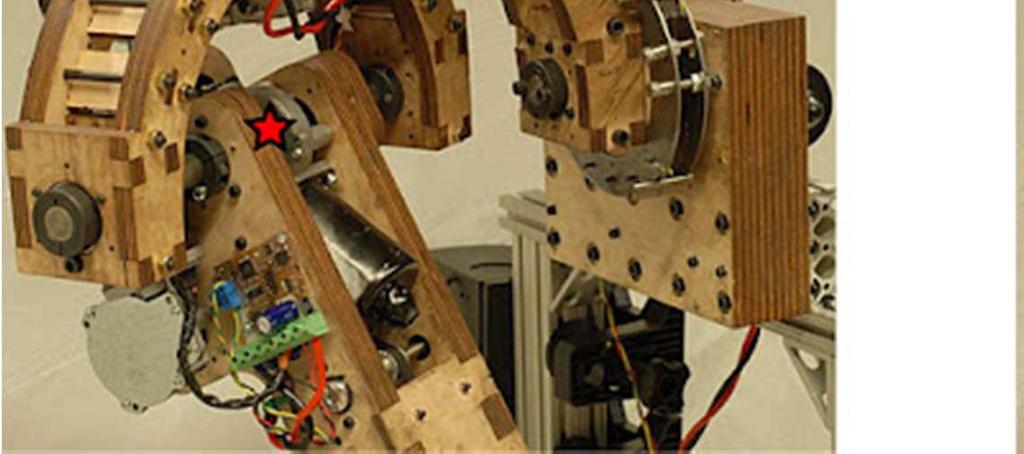

23 Wood Linkage Material

24 Linkage Material Custom engineered from many materials Intuitive surgical Da Vinci



25 Position/joint angle encoders 1. Optical Can be at motor or at joint Easy to make 2. Hall effect magnetic Embedded in motor Magnets Hall sensors Stator (3. Potentiometer)

26 Physically counting rotations You can also use the touch sensor as a rotation sensor. Attach a cam to the rotating axle, and then position the LEGO sensor so that it is hit by the cam as the axle rotates. Counting the number of hits, combined with the wheel radius, can give you a distance reading. Measuring the time between hits can give you a speed measurement. Note that this only works well for axles that don't rotate very fast. llk.media.mit.edu/projects/cricket/doc/lego-touchsensors.html limited resolution?

27 Optical Encoders 1: absolute Detecting motor shaft orientation Binary encoding of shaft rotation via light patterns potential problems?
28 Optical Encoders 1: absolute Detecting motor shaft orientation Alternative encodings are also popular!
29 Gray Code # Binary What is important about each of these transitions? ? ? what comes next? other applications?


30 Applications? # Binary 0 0 Gray 000 neighboring representations differ by only 1 bit with important applications not found even in The Official Duke Nukem 3d Strategies and Secrets ($1.94) wires?
31 Absolute Optical Encoders Complexity of distinguishing many different states -- high resolution is expensive! something simpler?
32 Relative Optical Encoders Track position changes light sensor - calibration? - resolution? - direction? grating light emitter decode circuitry
33 Relative Optical Encoders Relative position light sensor - calibration? - resolution? - direction? grating light emitter decode circuitry A
34 Relative Optical Encoders Relative position light sensor - calibration? - resolution? - direction? grating light emitter decode circuitry A A A vs. B B B
35 Quadrature encoding Relative position light sensor - calibration? - resolution? - direction? grating light emitter decode circuitry A B quadrature encoding A leads B Why not add more lines?

36 Relative Optical Encoders Relative position mask/diffuser A light sensor grating light emitter decode circuitry B A diffuser tends to smooth these signals Two thresholds are used: hysteresis Another $40 word free with the purchase of both proprioceptive and "exteroceptive"! Ideal Real From proprio- to exteroceptivity! First, a note on building materials...


37 Optical Encoders in Lego! from the FIRST Lego League only a first take



38 Lego-based quadrature encoding!
 Off-board computing")
39 Computers Usually embedded microcontrollers PIC Arduino Rasberry Pi Can use regular PC Laptop Mini-PC Server (e.g. in PR2) Off-board computing
 Plays well with serial communications can control it from any language supported under Windows, Mac OX,")
40 Arduino USB-based microcontroller interface board to: servomotors lots of sensors (not cameras) really anything ("low" bandwidth) Comes with its own software (processing) Plays well with serial communications can control it from any language supported under Windows, Mac OX, Linux

41 $ x GHz ARM w. FPU GPU Linux Like a 500Mhz PC Uses 2W power GPIO ports to connect: Sensors Motors Camera!! Runs video processing! OpenCV Raspberry-Pi
42 Robot categories summary Mobile ground robots Inexpensive, easy 2DOF Robot Arms Hands Precise, expensive 6+ DOF Manipulates objects Aerial/underwater Challenging dynamics and control UAV: Limited power and payload




43 Summary: Parts of a Robot Motors Motor controllers Transmission Linkages Sensors Computer
44 Upcoming: Kinematics: How do we model the relationship between: how motors, joints and wheels turn (axle rotations: radians) and how the robot moves (translation : x,y,z millimetre and rot) Control Paradigms: Reactive/Subsumption vs SPA Simple local reactive control Potential field motion control.
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities.
 Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Application Note Using MagAlpha Devices to Replace Optical Encoders
 Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Actuator Components 2
 Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
Robotic Navigation Distance Control Platform
 Robotic Navigation Distance Control Platform System Block Diagram Student: Scott Sendra Project Advisors: Dr. Schertz Dr. Malinowski Date: November 18, 2003 Objective The objective of the Robotic Navigation
Robotic Navigation Distance Control Platform System Block Diagram Student: Scott Sendra Project Advisors: Dr. Schertz Dr. Malinowski Date: November 18, 2003 Objective The objective of the Robotic Navigation
Lab 5: Inverted Pendulum PID Control
 Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Position and Velocity Sensors
 Position and Velocity Sensors Introduction: A third type of sensor which is commonly used is a speed or position sensor. Position sensors are required when the location of an object is to be controlled.
Position and Velocity Sensors Introduction: A third type of sensor which is commonly used is a speed or position sensor. Position sensors are required when the location of an object is to be controlled.
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method
 Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Assembly Language. Topic 14 Motion Control. Stepper and Servo Motors
 Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
SPIDER ROBOT Presented by :
 SPIDER ROBOT Muffakham Jah College of Engineering & Technology Presented by : 160415735112: MOGAL ABDUL SAMEER BAIG 160415735070: NAZIA FATIMA Mini project Coordinators Name & Designation: Shaik Sabeera
SPIDER ROBOT Muffakham Jah College of Engineering & Technology Presented by : 160415735112: MOGAL ABDUL SAMEER BAIG 160415735070: NAZIA FATIMA Mini project Coordinators Name & Designation: Shaik Sabeera
Other than physical size, the next item that all RC servo specifications indicate is speed and torque.
 RC servos convert electrical commands from the receiver back into movement. A servo simply plugs into a specific receiver channel and is used to move that specific part of the RC model. This movement is
RC servos convert electrical commands from the receiver back into movement. A servo simply plugs into a specific receiver channel and is used to move that specific part of the RC model. This movement is
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Assembly Guide Robokits India
 Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Digital DIY Technologies and Tools Welcome to Digital DIY and Technologies and Tools
 Digital DIY Technologies and Tools Welcome to Digital DIY and Technologies and Tools This module has the following learning objectives: 1. Understanding the general potential of DiDIY technologies; 2.
Digital DIY Technologies and Tools Welcome to Digital DIY and Technologies and Tools This module has the following learning objectives: 1. Understanding the general potential of DiDIY technologies; 2.
Robot Actuators. Motors and Control. Stepper Motor Basics. Increased Resolution. Stepper motors. DC motors AC motors. Physics review: Nature is lazy.
 obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
Hobby Servo Tutorial. Introduction. Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial
 Hobby Servo Tutorial Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial Introduction Servo motors are an easy way to add motion to your electronics projects. Originally used in remotecontrolled
Hobby Servo Tutorial Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial Introduction Servo motors are an easy way to add motion to your electronics projects. Originally used in remotecontrolled
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
SRV02-Series. Rotary Servo Plant. User Manual
 SRV02-Series Rotary Servo Plant User Manual SRV02-(E;EHR)(T) Rotary Servo Plant User Manual 1. Description The plant consists of a DC motor in a solid aluminum frame. The motor is equipped with a gearbox.
SRV02-Series Rotary Servo Plant User Manual SRV02-(E;EHR)(T) Rotary Servo Plant User Manual 1. Description The plant consists of a DC motor in a solid aluminum frame. The motor is equipped with a gearbox.
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي
7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي") العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
Understanding RC Servos and DC Motors
 Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Studuino Icon Programming Environment Guide
 Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
DASL 120 Introduction to Microcontrollers
 DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
Data Sheet. AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder. Description. Features.
 AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world.
 Activity 3.1.1 Inputs and Outputs for CT Introduction Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive
Activity 3.1.1 Inputs and Outputs for CT Introduction Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive
Actuators, sensors and control architecture
 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
DC Motor and Servo motor Control with ARM and Arduino. Created by:
 DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
Persistence of Vision LED Sphere
 Persistence of Vision LED Sphere Project Proposal ECE 445 February 10, 2016 TA: Vivian Hou Michael Ling Li Quan 1 Table of Contents 1.0 Introduction... 3 1.1 Purpose and Motivation:... 3 1.2 Objectives:...
Persistence of Vision LED Sphere Project Proposal ECE 445 February 10, 2016 TA: Vivian Hou Michael Ling Li Quan 1 Table of Contents 1.0 Introduction... 3 1.1 Purpose and Motivation:... 3 1.2 Objectives:...
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
INTELLIGENT SEGREGATION SYSTEM
 1, 2 3 INTELLIGENT SEGREGATION SYSTEM 1 Yogeshwar Vijay Chavan, Akash Kisan Adsul, Prof. Punam Chaudhari 3 Students, Electronics & Telecommunication, G. S. Moze College of Engineering, Balewadi,Pune, Maharashtra
1, 2 3 INTELLIGENT SEGREGATION SYSTEM 1 Yogeshwar Vijay Chavan, Akash Kisan Adsul, Prof. Punam Chaudhari 3 Students, Electronics & Telecommunication, G. S. Moze College of Engineering, Balewadi,Pune, Maharashtra
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Design and Implementation of FPGA-Based Robotic Arm Manipulator
 Design and Implementation of FPGABased Robotic Arm Manipulator Mohammed Ibrahim Mohammed Ali Military Technical College, Cairo, Egypt Supervisors: Ahmed S. Bahgat 1, Engineering physics department Mahmoud
Design and Implementation of FPGABased Robotic Arm Manipulator Mohammed Ibrahim Mohammed Ali Military Technical College, Cairo, Egypt Supervisors: Ahmed S. Bahgat 1, Engineering physics department Mahmoud
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Teaching Children Proportional Control using ROBOLAB 2.9. By Dr C S Soh
 Teaching Children Proportional Control using ROBOLAB 2.9 By Dr C S Soh robodoc@fifth-r.com Objective Using ROBOLAB 2.9, children can experiment with proportional control the same way as undergraduates
Teaching Children Proportional Control using ROBOLAB 2.9 By Dr C S Soh robodoc@fifth-r.com Objective Using ROBOLAB 2.9, children can experiment with proportional control the same way as undergraduates
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
Chapter 6: Sensors and Control
 Chapter 6: Sensors and Control One of the integral parts of a robot that transforms it from a set of motors to a machine that can react to its surroundings are sensors. Sensors are the link in between
Chapter 6: Sensors and Control One of the integral parts of a robot that transforms it from a set of motors to a machine that can react to its surroundings are sensors. Sensors are the link in between
Data Sheet. AEDS-9240 Series 360/720 CPR Commutation Encoder Module. Features. Description. Applications
 AEDS-9240 Series 360/720 CPR Commutation Encoder Module Data Sheet Description The AEDS-9240 optical encoder is a six channel optical incremental encoder module. When used with a codewheel, this encoder
AEDS-9240 Series 360/720 CPR Commutation Encoder Module Data Sheet Description The AEDS-9240 optical encoder is a six channel optical incremental encoder module. When used with a codewheel, this encoder
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Data Sheet. AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel. Features. Description. Applications
 AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel Data Sheet Description The AEDB-9340 optical encoder series are six-channel optical incremental encoder modules with codewheel.
AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel Data Sheet Description The AEDB-9340 optical encoder series are six-channel optical incremental encoder modules with codewheel.
Water Meter Basics Incremental encoders
 Water Meter Basics Measuring flow can be accomplished in a number of ways. For residential applications, the two most common approaches are turbine and positive displacement technologies. The turbine meters
Water Meter Basics Measuring flow can be accomplished in a number of ways. For residential applications, the two most common approaches are turbine and positive displacement technologies. The turbine meters
Vision-Guided Motion. Presented by Tom Gray
 Vision-Guided Motion Presented by Tom Gray Overview Part I Machine Vision Hardware Part II Machine Vision Software Part II Motion Control Part IV Vision-Guided Motion The Result Harley Davidson Example
Vision-Guided Motion Presented by Tom Gray Overview Part I Machine Vision Hardware Part II Machine Vision Software Part II Motion Control Part IV Vision-Guided Motion The Result Harley Davidson Example
Servos A Brief Guide
 Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
Mechatronics System Design - Sensors
 Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
CIS009-2, Mechatronics Signals & Motors
 CIS009-2, Signals & Motors Bedfordshire 13 th December 2012 Outline 1 2 3 4 5 6 7 8 3 Signals Two types of signals exist: 4 Bedfordshire 52 Analogue signal In an analogue signal voltages and currents continuously
CIS009-2, Signals & Motors Bedfordshire 13 th December 2012 Outline 1 2 3 4 5 6 7 8 3 Signals Two types of signals exist: 4 Bedfordshire 52 Analogue signal In an analogue signal voltages and currents continuously
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
3-Degrees of Freedom Robotic ARM Controller for Various Applications
 3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY
 AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
Dimensions: Specifications:
 Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
Programming of Embedded Systems Uppsala University Spring 2014 Summary of Pan and Tilt project
 Programming of Embedded Systems Uppsala University Spring 2014 Summary of Pan and Tilt project Björn Forsberg Martin Hagelin Paul Norstöm Maksim Olifer May 28, 2014 1 Introduction The goal of the project
Programming of Embedded Systems Uppsala University Spring 2014 Summary of Pan and Tilt project Björn Forsberg Martin Hagelin Paul Norstöm Maksim Olifer May 28, 2014 1 Introduction The goal of the project
Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers
 Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET)
") Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING
 HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING K.Gopal, Dr.N.Suthanthira Vanitha, M.Jagadeeshraja, and L.Manivannan, Knowledge Institute of Technology Abstract: - The advancement
HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING K.Gopal, Dr.N.Suthanthira Vanitha, M.Jagadeeshraja, and L.Manivannan, Knowledge Institute of Technology Abstract: - The advancement
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
Computer Numeric Control
 Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
MATHEMATICAL MODELS OF GEAR TOOTH SPEED SENSORS WITH DUAL OUTPUTS
 MATHEMATICAL MODELS OF GEAR TOOTH SPEED SENSORS WITH DUAL OUTPUTS Ji-Gou Liu 1 and Zhe Zheng 2 1 ChenYang Technologies GmbH & Co. KG., Finsing, Germany 2 University of Shanghai for Science and Technology,
MATHEMATICAL MODELS OF GEAR TOOTH SPEED SENSORS WITH DUAL OUTPUTS Ji-Gou Liu 1 and Zhe Zheng 2 1 ChenYang Technologies GmbH & Co. KG., Finsing, Germany 2 University of Shanghai for Science and Technology,
EXPERIMENT 6: Advanced I/O Programming
 EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
Implementation Of Vision-Based Landing Target Detection For VTOL UAV Using Raspberry Pi
 Implementation Of Vision-Based Landing Target Detection For VTOL UAV Using Raspberry Pi Ei Ei Nyein, Hla Myo Tun, Zaw Min Naing, Win Khine Moe Abstract: This paper presents development and implementation
Implementation Of Vision-Based Landing Target Detection For VTOL UAV Using Raspberry Pi Ei Ei Nyein, Hla Myo Tun, Zaw Min Naing, Win Khine Moe Abstract: This paper presents development and implementation
A Practical Primer On Motor Drives (Part 13): Motor Drive Control Architectures And Algorithms
: Motor Drive Control Architectures And Algorithms") ISSUE: February 2017 A Practical Primer On Motor Drives (Part 13): Motor Drive Control Architectures And Algorithms by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. Part 12 began the explanation of
ISSUE: February 2017 A Practical Primer On Motor Drives (Part 13): Motor Drive Control Architectures And Algorithms by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. Part 12 began the explanation of
LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation)
") LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation) Uses some parts not found in NXT Mindstorms Kit 9797 e.g. 2 nd Turntable, 1x12 plates, and 15100: Pin-hole Friction Peg.
LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation) Uses some parts not found in NXT Mindstorms Kit 9797 e.g. 2 nd Turntable, 1x12 plates, and 15100: Pin-hole Friction Peg.
Built-in soft-start feature. Up-Slope and Down-Slope. Power-Up safe start feature. Motor will only start if pulse of 1.5ms is detected.
 Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Megamark Arduino Library Documentation
 Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
TRWinProg 101by Chris Bowman October 10
 TRWinProg 101by Chris Bowman October 10 TRWinProg is a Windows based program for serial programming of encoders. The program allows viewing of setup data stored within the encoder and allowing the user
TRWinProg 101by Chris Bowman October 10 TRWinProg is a Windows based program for serial programming of encoders. The program allows viewing of setup data stored within the encoder and allowing the user
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
uarm Metal Developer Guide
 uarm Metal Developer Guide 2017-03 UFACTORY TECHNOLOGY CO.,LTD NANSHAN DISTRICT, SHENZHEN, P.R.CHINA WWW.UFACTORY.CC Contents Introduction...2 Software...3 Software Installation... 3 Communication Protocol...
uarm Metal Developer Guide 2017-03 UFACTORY TECHNOLOGY CO.,LTD NANSHAN DISTRICT, SHENZHEN, P.R.CHINA WWW.UFACTORY.CC Contents Introduction...2 Software...3 Software Installation... 3 Communication Protocol...
Make: Sensors. Tero Karvinen, Kimmo Karvinen, and Ville Valtokari. (Hi MAKER MEDIA SEBASTOPOL. CA
 Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Glossary. Glossary Engineering Reference. 35
 Glossary Engineering Reference Glossary Abbe error The positioning error resulting from angular motion and an offset between the measuring device and the point of interest. Abbe offset The value of the
Glossary Engineering Reference Glossary Abbe error The positioning error resulting from angular motion and an offset between the measuring device and the point of interest. Abbe offset The value of the
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
09-2 EE 4770 Lecture Transparency. Formatted 12:49, 19 February 1998 from lsli
 09-1 09-1 Displacement and Proximity Displacement transducers measure the location of an object. Proximity transducers determine when an object is near. Criteria Used in Selection of Transducer How much
09-1 09-1 Displacement and Proximity Displacement transducers measure the location of an object. Proximity transducers determine when an object is near. Criteria Used in Selection of Transducer How much
BLuAC5 Brushless Universal Servo Amplifier
 BLuAC5 Brushless Universal Servo Amplifier Description The BLu Series servo drives provide compact, reliable solutions for a wide range of motion applications in a variety of industries. BLu Series drives
BLuAC5 Brushless Universal Servo Amplifier Description The BLu Series servo drives provide compact, reliable solutions for a wide range of motion applications in a variety of industries. BLu Series drives
GESTUR. Sensing & Feedback Glove for interfacing with Virtual Reality
 GESTUR Sensing & Feedback Glove for interfacing with Virtual Reality Initial Design Review ECE 189A, Fall 2016 University of California, Santa Barbara History & Introduction - Oculus and Vive are great
GESTUR Sensing & Feedback Glove for interfacing with Virtual Reality Initial Design Review ECE 189A, Fall 2016 University of California, Santa Barbara History & Introduction - Oculus and Vive are great
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
RC Servo Interface. Figure Bipolar amplifier connected to a large DC motor
 The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
Page ENSC387 - Introduction to Electro-Mechanical Sensors and Actuators: Simon Fraser University Engineering Science
 Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Pathbreaking robots for pathbreaking research. Introducing. KINOVA Gen3 Ultra lightweight robot. kinovarobotics.com 1
 Pathbreaking robots for pathbreaking research Introducing Gen3 Ultra lightweight robot kinovarobotics.com 1 Opening a world of possibilities in research Since the launch of Kinova s first assistive robotic
Pathbreaking robots for pathbreaking research Introducing Gen3 Ultra lightweight robot kinovarobotics.com 1 Opening a world of possibilities in research Since the launch of Kinova s first assistive robotic