Actuators, sensors and control architecture
|
|
|
- Rosanna Greer
- 5 years ago
- Views:
Transcription
 and the manipulation apparatus (mechanical arms, end-effectors, artificial hands) sensors acquire data on the internal status of the mechanical system (proprioceptive sensors, such")
1 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical legs) and the manipulation apparatus (mechanical arms, end-effectors, artificial hands) sensors acquire data on the internal status of the mechanical system (proprioceptive sensors, such as position transducers) as well as on the external status of the environment (exteroceptive sensors, such as force sensors and cameras) control system (intelligence/brain) elaborates sensory data and establishes actions robotics is commonly defined as the science studying the intelligent connection between perception and action
2 Joint Actuating System
3 Servomotors concerning the kind of input power Pa, motors can be classified into: Pneumatic motors which utilize the pneumatic energy provided by a compressor and transform it into mechanical energy by means of pistons or turbines Hydraulic motors which transform the hydraulic energy stored in a reservoir into mechanical energy by means of suitable pumps Electric motors whose primary supply is the electric energy available from the electric distribution system requirements in conventional applications: low inertia and high power-to-weight ratio possibility of overload and delivery of impulse torques capability to develop high accelerations wide velocity range (from 1 to 1000 revolutes/min) high positioning accuracy (at least 1/1000 of a circle) low torque ripple so as to guarantee continuous rotation even at low speed powers ranging from about 10W to about 10 kw
4 Electric servomotors the motor must play the role of a servomotor: good trajectory tracking and positioning accuracy the most employed motors in robotics are electric servomotors the permanent-magnet DC servomotor consists of: a stator coil that generates magnetic flux (permanent magnet) an armature that includes the current-carrying winding that surrounds a rotary ferromagnetic core (rotor). a commutator that provides an electric connection by means of brushes between the rotating armature winding and the external feed winding the brushless DC servomotor consists of: a rotating coil (rotor) that generates magnetic flux (permanent magnet) a stationary armature (stator) made by a polyphase winding a static commutator that, on the basis of the signals provided by a position sensor located on the motor shaft, generates the feed sequence of the armature winding phases stepper motors
5 Hydraulic servomotors operating principle of volume variation under the action of compressed fluid single pistons (cylinders reciprocating in tubular housings), limited range rotary servomotors have unlimited range and are constituted by several pistons with an axial or radial disposition with respect to the motor axis of rotation static and dynamic performance comparable with that of electric servomotors from an operational viewpoint, it can be observed that: both types of servomotors have a good dynamic behaviour, although the electric servomotor has greater control flexibility. The dynamic behavior of a hydraulic servomotor depends on the temperature of the compressed fluid the electric servomotor is typically characterized by high speeds and low torques, and as such it requires the use of gear transmissions (causing elasticity and backlash). On the other hand, the hydraulic servomotor is capable of generating high torques at low speeds
6 electric servomotors Pros and cons advantages: widespread availability of power supply low cost and wide range of products high power conversion efficiency easy maintenance no pollution of working environment limitations: burnout problems at static situations caused by the effect of gravity on the manipulator; emergency brakes are then required need for special protection when operating in flammable environments hydraulic servomotors advantages: do not suffer from burnout in static situations are self-lubricated and the circulating fluid facilitates heat disposal are inherently safe in harmful environments have excellent power-to-weight ratios limitations: need for a hydraulic power station high cost, narrow range of products, and difficulty of miniaturization low power conversion efficiency need for operational maintenance pollution of working environment due to oil leakage
7 Transmissions spur gears that modify the characteristics of the rotational motion of the motor by changing the axis of rotation and/or by translating the application point; spur gears are usually constructed with wide crosssection teeth and squat shafts lead screws that convert rotational motion of the motor into translational motion, as needed for actuation of prismatic joints; in order to reduce friction, ball screws are usually employed that are preloaded so as to increase stiffness and decrease backlash timing belts and chains which are equivalent from a kinematic viewpoint and are employed to locate the motor remotely from the axis of the actuated joint. The stress on timing belts may cause strain, and then these are used in applications requiring high speeds and low forces. On the other hand, chains are used in applications requiring low speeds, since their large mass may induce vibration at high speeds

8 Transmission Effects

9 Example: rigid pendulum in a generic n-link manipulator the nonlinear couplings between the motors of the various links will be reduced by the presence of transmissions with large reduction ratios
10 Sensors proprioceptive sensors characterize the internal state of the manipulator, i.e.: joint positions joint velocities joint torques exteroceptive sensors extract the features characterizing the interaction of the robot with the objects in the environment: force sensors tactile sensors proximity sensors range sensors vision sensors
11 Position transducers provide an electric signal proportional to the linear or angular displacement of a mechanical apparatus with respect to a given reference position linear displacements potentiometers linear variable-differential transformers (LVDT) inductosyns angular displacements potentiometers encoder resolver synchros

12 Absolute encoders

 by (digitally) measuring the frequency of the pulse train by (digitally) measuring the sampling time of the pulse")
13 Incremental encoders suitable counting and storing electronic circuits allow the evaluation of the absolute positions if an external circuitry is employed, velocity measurements can be reconstructed from position measurements if a pulse is generated at each transition, a velocity measurement can be obtained using a voltage-to-frequency converter (with analog output) by (digitally) measuring the frequency of the pulse train by (digitally) measuring the sampling time of the pulse train
14 Force Sensors Strain gauge two strain gauges inserted in two adjacent arms of the bridge reduce the effect of temperature variations (one gauge glued on a portion of the extensible element not subject to strain) increase bridge sensitivity (one gauge glued on the extensible element in such a way that one strain gauge is subject to traction and the other to compression
15 Shaft torque sensor to employ a servomotor as a torque-controlled generator an indirect measurement of the driving torque is typically used, e.g., through the measurement of armature current in a permanent-magnet DC servomotor to guarantee insensitivity to change of parameters it is necessary to resort to a direct torque measurement strain gauges mounted on an extensible apparatus interposed between the motor and the joint (hollow shafting) by means of graphite brushes, it is possible to feed the bridge and measure the resulting unbalanced signal which is proportional to the applied torque such measurement does not account for the inertial and friction torque contributions as well as for the transmission located upstream of the measurement point
16 Wrist force sensor Ddds diameter of about 10 cm height of about 5 cm measurement range of 50 to 500N for the forces and of 5 to 70N m for the torques resolution of 0.1% of the maximum force and of 0.05% of the maximum torque sampling frequency is of the order of 1 khz


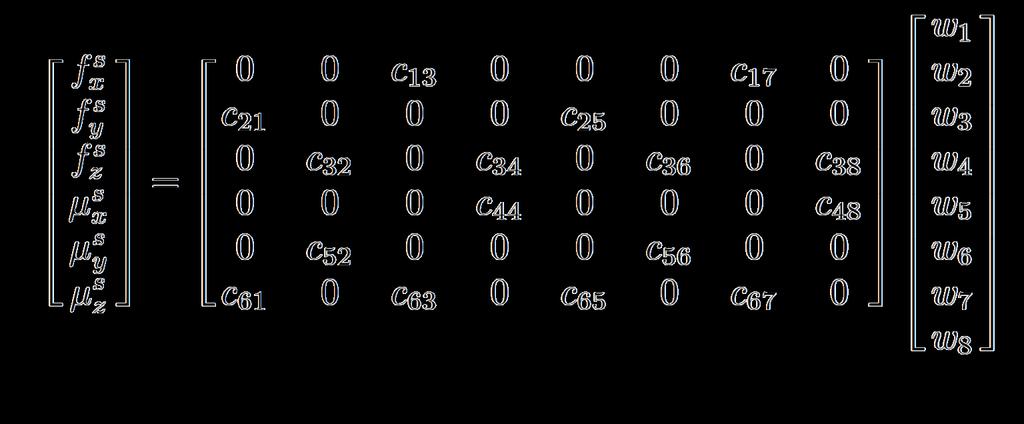
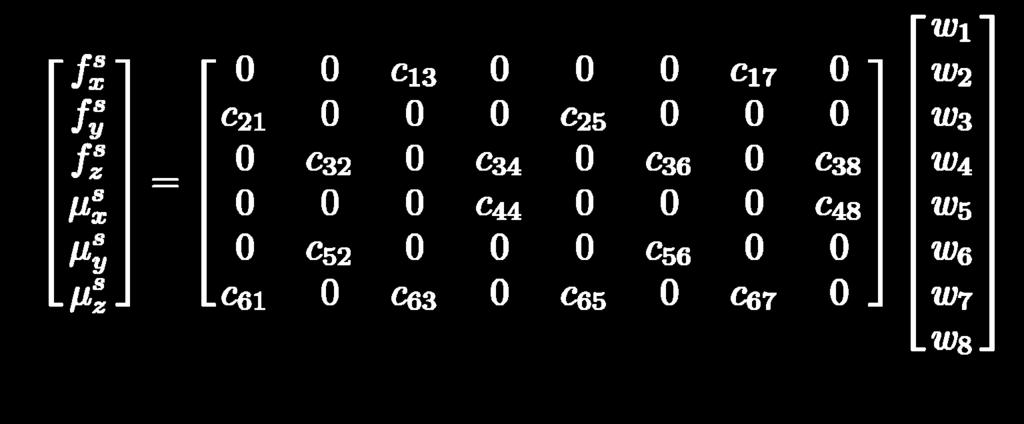
17 Maltese-cross force sensor Calibration matrix
18 Range sensors proximity sensors, a simplified type of range sensors, capable of detecting only the presence of objects nearby the sensitive part of the sensor the distance within which such sensors detect objects is defined sensitive range range sensors are capable of providing structured data, given by the distance of the measured object and the corresponding measurement direction the data provided by the range sensors are used in robotics to avoid obstacles, build maps of the environment, recognize objects sound propagation through an elastic fluid, the so-called sonars (Sound NAvigation and Ranging) light propagation features, the so-called lasers (Light Amplification by Stimulated Emission of Radiation)

19 Sonars employ acoustic pulses and their echoes to measure the range to an object the range to an object is proportional to the echo travel time, commonly called time-offlight, i.e., the time which the acoustic wave takes to cover the distance sensor-objectsensor sonars are widely utilized in robotics, and especially in mobile and underwater robotics low cost light weight low power consumption and low computational effort in some applications, such as in underwater and low visibility environments, the sonar is often the only viable sensing modality typical frequencies in robotics range from 20 KHz to 200 KHz in this range, the energy of the wave is concentrated in a conical volume whose beamwidth depends on the frequency as well as on the transducer diameter (not smaller than 15 deg) limits: angular and radial resolution, as well as nonnegligible limits with respect to the minimum and maximum measurement range that can be achieved
 being of resonant type, these transducers are")
20 the piezoelectric transducers exploit the property of some crystal materials to deform under the action of an electric field and vibrate when a voltage is applied at the resonant frequency of the crystal low efficiency of the acoustic match of these transducers with compressible fluids such as air (conical concave horn is mounted on the crystal) being of resonant type, these transducers are characterized by a rather low bandwidth significant mechanical inertia which severely limits the minimum detectable range (two distinct transducers as transmitter and receiver) the electrostatic transducers operate as capacitors whose capacitance varies moving and/or deforming one of its plates large bandwidth and high sensitivity low mechanical inertia rather efficient acoustic match with air Polaroid sonar 600 series, diameter of the transducers almost 4 cm, operates at 50 khz frequency and is characterized by a beamwidth of 15 deg, maximum range of about 10m and a mimimum range about 15 cm with an accuracy of ±1% across the measurement range reflective properties of the surfaces Sonars


21 Laser time-of-flight sensors limitations on the accuracy of these sensors are based on the minimum observation time (costs limits) and depends on the accuracy of the receiver and the temporal width of the laser pulse many time-of-flight sensors used have what is called an ambiguity interval. The sensor emits pulses of light periodically, and computes an average target distance from the time of the returning pulses in an interval to obtain these denser representations, the laser beam is swept across the scene range of m, an accuracy of 5 10 mm, and a frequency of data acquisition per second of Hz.
 false specular reflections from metallic and polished objects advantages: they can easily generate")
22 Laser triangulation laser sensors triangulation method is based on the trigonometric properties of triangles and in particular on the cosine theorem the main limitations: potential eye safety risks from the power of lasers, particularly when invisible laser frequencies are used (commonly infrared) false specular reflections from metallic and polished objects advantages: they can easily generate bright beams with lightweight sources the infrared beams can be used unobtrusively they focus well to give narrow beams single-frequency sources allow easier rejection filtering of unwanted frequencies and do not disperse from refraction as much as full spectrum sources
23 Control architecture the control system to supervise the activities of a robotic system should be endowed with the following functions: capability of moving physical objects in the working environment, i.e., manipulation ability capability of obtaining information on the state of the system and working environment, i.e., sensory ability capability of exploiting information to modify system behaviour in a preprogrammed manner, i.e., intelligence ability capability of storing, elaborating and providing data on system activity, i.e., data processing ability these functions can be obtained by means of a functional architecture which is thought of as the superposition of several activity levels arranged in a hierarchical structure Functional architecture Programming environment Hardware architecture
24 Functional Architecture
25 Hierarchical levels of a functional architecture for industrial robots
26 Programming Environment As a consequence, a robot programming environment should be endowed with the following features: real-time operating system world modelling motion control sensory data reading interaction with physical system error detection capability recovery of correct operational functions specific language structure Teaching-by-Showing Robot-oriented programming Object-oriented programming
27 Hardware Architecture
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method
 Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
Sonic Distance Sensors
 Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
ON THE PERFORMANCE OF LINEAR AND ROTARY SERVO MOTORS IN SUB MICROMETRIC ACCURACY POSITIONING SYSTEMS
 ON THE PERFORMANCE OF LINEAR AND ROTARY SERVO MOTORS IN SUB MICROMETRIC ACCURACY POSITIONING SYSTEMS Gilva Altair Rossi de Jesus, gilva@demec.ufmg.br Department of Mechanical Engineering, Federal University
ON THE PERFORMANCE OF LINEAR AND ROTARY SERVO MOTORS IN SUB MICROMETRIC ACCURACY POSITIONING SYSTEMS Gilva Altair Rossi de Jesus, gilva@demec.ufmg.br Department of Mechanical Engineering, Federal University
Industrial Sensors. Proximity Mechanical Optical Inductive/Capacitive. Position/Velocity Potentiometer LVDT Encoders Tachogenerator
 Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Computer Numeric Control
 Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Control Design for Servomechanisms July 2005, Glasgow Detailed Training Course Agenda
 Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
PVA Sensor Specifications
 Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Electronic Instrumentation and Measurements
 Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
n Measuring range ,02 N m to N m n Clockwise and counter-clockwise torque n Low linearity deviation of ± 0.05 % F.S.
 Precision Torque Sensor Non-contact transmission for rotating applications Optional measurement of angle and speed Model 8661 Code: Delivery: Warranty: 2-3 weeks 24 months Application The 8661 precision
Precision Torque Sensor Non-contact transmission for rotating applications Optional measurement of angle and speed Model 8661 Code: Delivery: Warranty: 2-3 weeks 24 months Application The 8661 precision
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities.
 Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Page ENSC387 - Introduction to Electro-Mechanical Sensors and Actuators: Simon Fraser University Engineering Science
 Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Actuators in Automatic Control System
 Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Study of Vee Plate Manufacturing Method for Indexing Table
 Study of Vee Plate Manufacturing Method for Indexing Table Yeon Taek OH Department of Robot System Engineering, Tongmyong University 428 Sinseon-ro, Nam-gu, Busan, Korea yeonoh@tu.ac.kr Abstract The indexing
Study of Vee Plate Manufacturing Method for Indexing Table Yeon Taek OH Department of Robot System Engineering, Tongmyong University 428 Sinseon-ro, Nam-gu, Busan, Korea yeonoh@tu.ac.kr Abstract The indexing
Engineering Reference
 Engineering Reference Linear & Rotary Positioning Stages Table of Contents 1. Linear Positioning Stages...269 1.1 Precision Linear Angular Dynamic 1.2 Loading Accuracy Repeatability Resolution Straightness
Engineering Reference Linear & Rotary Positioning Stages Table of Contents 1. Linear Positioning Stages...269 1.1 Precision Linear Angular Dynamic 1.2 Loading Accuracy Repeatability Resolution Straightness
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
Sensors (Transducer) Introduction By Sintayehu Challa
 Introduction By Sintayehu Challa") Sensors (Transducer) Introduction What are Sensors? Basically the quantities to be measured are Non-Electrical quantities such as temperature, pressure,displacement,humidity, fluid flow, speed etc, but
Sensors (Transducer) Introduction What are Sensors? Basically the quantities to be measured are Non-Electrical quantities such as temperature, pressure,displacement,humidity, fluid flow, speed etc, but
4) Drive Mechanisms. Techno_Isel H830 Catalog
 Drive Mechanisms. Techno_Isel H830 Catalog") 4) Drive Mechanisms This section will introduce most of the more common types of drive mechanisms found in linear motion machinery. Ideally, a drive system should not support any loads, with all the loads
4) Drive Mechanisms This section will introduce most of the more common types of drive mechanisms found in linear motion machinery. Ideally, a drive system should not support any loads, with all the loads
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Mechatronics Chapter Sensors 9-1
 MEMS1049 Mechatronics Chapter Sensors 9-1 Proximity sensors and Switches Proximity sensor o o o A proximity sensor is a sensor able to detect the presence of nearby objects without any physical contact.
MEMS1049 Mechatronics Chapter Sensors 9-1 Proximity sensors and Switches Proximity sensor o o o A proximity sensor is a sensor able to detect the presence of nearby objects without any physical contact.
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Course Plan Overview January 2015
 Course Plan Overview January 2015 Page- 1 Impedance: Traditional electrical sense - as generalized resistance: Simple & Complex!! In the mechanical sense, or in a general sense with regard to other domains
Course Plan Overview January 2015 Page- 1 Impedance: Traditional electrical sense - as generalized resistance: Simple & Complex!! In the mechanical sense, or in a general sense with regard to other domains
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Velocity and Acceleration Measurements
 Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Ch 5 Hardware Components for Automation
 Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Ch 5 Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog-to-Digital Conversion 4. Digital-to-Analog Conversion 5. Input/Output Devices for Discrete Data Computer-Process Interface
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Actuator Components 2
 Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
9/28/2010. Chapter , The McGraw-Hill Companies, Inc.
 Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
VARIABLE INDUCTANCE TRANSDUCER
 VARIABLE INDUCTANCE TRANSDUCER These are based on a change in the magnetic characteristic of an electrical circuit in response to a measurand which may be displacement, velocity, acceleration, etc. 1.
VARIABLE INDUCTANCE TRANSDUCER These are based on a change in the magnetic characteristic of an electrical circuit in response to a measurand which may be displacement, velocity, acceleration, etc. 1.
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Developer Techniques Sessions
 1 Developer Techniques Sessions Physical Measurements and Signal Processing Control Systems Logging and Networking 2 Abstract This session covers the technologies and configuration of a physical measurement
1 Developer Techniques Sessions Physical Measurements and Signal Processing Control Systems Logging and Networking 2 Abstract This session covers the technologies and configuration of a physical measurement
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Basic NC and CNC. Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur
 Basic NC and CNC Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur Micro machining Lab, I.I.T. Kanpur Outline 1. Introduction to CNC machine 2. Component
Basic NC and CNC Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur Micro machining Lab, I.I.T. Kanpur Outline 1. Introduction to CNC machine 2. Component
Introduction to Measurement Systems
 MFE 3004 Mechatronics I Measurement Systems Dr Conrad Pace Page 4.1 Introduction to Measurement Systems Role of Measurement Systems Detection receive an external stimulus (ex. Displacement) Selection measurement
MFE 3004 Mechatronics I Measurement Systems Dr Conrad Pace Page 4.1 Introduction to Measurement Systems Role of Measurement Systems Detection receive an external stimulus (ex. Displacement) Selection measurement
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems
 1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
PMSM TECHNOLOGY IN HIGH PERFORMANCE VARIABLE SPEED APPLICATIONS
 PMSM TECHNOLOGY IN HIGH PERFORMANCE VARIABLE SPEED APPLICATIONS John Chandler Automotion Inc., an Infranor Inter AG Company Ann Arbor, MI Abstract Many variable speed applications found in industry today
PMSM TECHNOLOGY IN HIGH PERFORMANCE VARIABLE SPEED APPLICATIONS John Chandler Automotion Inc., an Infranor Inter AG Company Ann Arbor, MI Abstract Many variable speed applications found in industry today
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
R30D RVDTs DC-Operated Rotary Variable Differential Transformers
 R30D RVDTs DC-Operated Rotary Variable Differential Transformers RVDTs incorporate a proprietary noncontact design that dramatically improves long term reliability when compared to other traditional rotary
R30D RVDTs DC-Operated Rotary Variable Differential Transformers RVDTs incorporate a proprietary noncontact design that dramatically improves long term reliability when compared to other traditional rotary
Advanced Measurements
 Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 5: Displacement measurement Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty of Engineering
Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 5: Displacement measurement Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty of Engineering
Motor control using FPGA
 Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
Principles of operation 5
 Principles of operation 5 The following section explains the fundamental principles upon which Solartron Metrology s linear measurement products are based. > Inductive technology (gauging and displacement)
Principles of operation 5 The following section explains the fundamental principles upon which Solartron Metrology s linear measurement products are based. > Inductive technology (gauging and displacement)
430. The Research System for Vibration Analysis in Domestic Installation Pipes
 430. The Research System for Vibration Analysis in Domestic Installation Pipes R. Ramanauskas, D. Gailius, V. Augutis Kaunas University of Technology, Studentu str. 50, LT-51424, Kaunas, Lithuania e-mail:
430. The Research System for Vibration Analysis in Domestic Installation Pipes R. Ramanauskas, D. Gailius, V. Augutis Kaunas University of Technology, Studentu str. 50, LT-51424, Kaunas, Lithuania e-mail:
DC SERVO MOTOR CONTROL SYSTEM
 DC SERVO MOTOR CONTROL SYSTEM MODEL NO:(PEC - 00CE) User Manual Version 2.0 Technical Clarification /Suggestion : / Technical Support Division, Vi Microsystems Pvt. Ltd., Plot No :75,Electronics Estate,
DC SERVO MOTOR CONTROL SYSTEM MODEL NO:(PEC - 00CE) User Manual Version 2.0 Technical Clarification /Suggestion : / Technical Support Division, Vi Microsystems Pvt. Ltd., Plot No :75,Electronics Estate,
MA3. Miniature Absolute Magnetic Shaft Encoder Page 1 of 8. Description. Order Using #MA3 starting at $36.00 per unit. Features
 Page 1 of 8 Description The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
Page 1 of 8 Description The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
SYNCHRONOUS MACHINES
 SYNCHRONOUS MACHINES The geometry of a synchronous machine is quite similar to that of the induction machine. The stator core and windings of a three-phase synchronous machine are practically identical
SYNCHRONOUS MACHINES The geometry of a synchronous machine is quite similar to that of the induction machine. The stator core and windings of a three-phase synchronous machine are practically identical
AC Drive Technology. An Overview for the Converting Industry. Siemens Industry, Inc All rights reserved.
 AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
Design and Analysis of Articulated Inspection Arm of Robot
 VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Glossary. Glossary Engineering Reference. 35
 Glossary Engineering Reference Glossary Abbe error The positioning error resulting from angular motion and an offset between the measuring device and the point of interest. Abbe offset The value of the
Glossary Engineering Reference Glossary Abbe error The positioning error resulting from angular motion and an offset between the measuring device and the point of interest. Abbe offset The value of the
Active Vibration Isolation of an Unbalanced Machine Tool Spindle
 Active Vibration Isolation of an Unbalanced Machine Tool Spindle David. J. Hopkins, Paul Geraghty Lawrence Livermore National Laboratory 7000 East Ave, MS/L-792, Livermore, CA. 94550 Abstract Proper configurations
Active Vibration Isolation of an Unbalanced Machine Tool Spindle David. J. Hopkins, Paul Geraghty Lawrence Livermore National Laboratory 7000 East Ave, MS/L-792, Livermore, CA. 94550 Abstract Proper configurations
Actuators. EECS461, Lecture 5, updated September 16,
 Actuators The other side of the coin from sensors... Enable a microprocessor to modify the analog world. Examples: - speakers that transform an electrical signal into acoustic energy (sound) - remote control
Actuators The other side of the coin from sensors... Enable a microprocessor to modify the analog world. Examples: - speakers that transform an electrical signal into acoustic energy (sound) - remote control
Speech, Hearing and Language: work in progress. Volume 12
 Speech, Hearing and Language: work in progress Volume 12 2 Construction of a rotary vibrator and its application in human tactile communication Abbas HAYDARI and Stuart ROSEN Department of Phonetics and
Speech, Hearing and Language: work in progress Volume 12 2 Construction of a rotary vibrator and its application in human tactile communication Abbas HAYDARI and Stuart ROSEN Department of Phonetics and
Type of loads Active load torque: - Passive load torque :-
 Type of loads Active load torque: - Active torques continues to act in the same direction irrespective of the direction of the drive. e.g. gravitational force or deformation in elastic bodies. Passive
Type of loads Active load torque: - Active torques continues to act in the same direction irrespective of the direction of the drive. e.g. gravitational force or deformation in elastic bodies. Passive
Introduction. ELCT903, Sensor Technology Electronics and Electrical Engineering Department 1. Dr.-Eng. Hisham El-Sherif
 Introduction In automation industry every mechatronic system has some sensors to measure the status of the process variables. The analogy between the human controlled system and a computer controlled system
Introduction In automation industry every mechatronic system has some sensors to measure the status of the process variables. The analogy between the human controlled system and a computer controlled system
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Advanced Measurements
 Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 3: Position, Displacement, and Level Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty
Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 3: Position, Displacement, and Level Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty
ELECTRONIC CONTROL OF A.C. MOTORS
 CONTENTS C H A P T E R46 Learning Objectives es Classes of Electronic AC Drives Variable Frequency Speed Control of a SCIM Variable Voltage Speed Control of a SCIM Chopper Speed Control of a WRIM Electronic
CONTENTS C H A P T E R46 Learning Objectives es Classes of Electronic AC Drives Variable Frequency Speed Control of a SCIM Variable Voltage Speed Control of a SCIM Chopper Speed Control of a WRIM Electronic
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Shaft power measurement for marine propulsion system based on magnetic resonances
 Shaft power measurement for marine propulsion system based on magnetic resonances Li Qin 1,2a),XincongZhou 1,YanGao 2, Pengju Cao 2, Jianzhou Quan 2, and Zhixiong Li 1 1 School of Energy and Power Engineering,
Shaft power measurement for marine propulsion system based on magnetic resonances Li Qin 1,2a),XincongZhou 1,YanGao 2, Pengju Cao 2, Jianzhou Quan 2, and Zhixiong Li 1 1 School of Energy and Power Engineering,
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET)
") Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
CONTROL SYSTEM COMPONENTS. M.D. Desai Professor of Instrumentation and Control Engineering Institute of Technology Nirma University Ahmedabad
 CONTROL SYSTEM COMPONENTS M.D. Desai Professor of Instrumentation and Control Engineering Institute of Technology Nirma University Ahmedabad New Delhi-110001 2008 CONTROL SYSTEM COMPONENTS M.D. Desai 2008
CONTROL SYSTEM COMPONENTS M.D. Desai Professor of Instrumentation and Control Engineering Institute of Technology Nirma University Ahmedabad New Delhi-110001 2008 CONTROL SYSTEM COMPONENTS M.D. Desai 2008
Understanding RC Servos and DC Motors
 Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Continuous Sensors Accuracy Resolution Repeatability Linearity Precision Range
 Continuous Sensors A sensor element measures a process variable: flow rate, temperature, pressure, level, ph, density, composition, etc. Much of the time, the measurement is inferred from a second variable:
Continuous Sensors A sensor element measures a process variable: flow rate, temperature, pressure, level, ph, density, composition, etc. Much of the time, the measurement is inferred from a second variable:
Vibration Fundamentals Training System
 Vibration Fundamentals Training System Hands-On Turnkey System for Teaching Vibration Fundamentals An Ideal Tool for Optimizing Your Vibration Class Curriculum The Vibration Fundamentals Training System
Vibration Fundamentals Training System Hands-On Turnkey System for Teaching Vibration Fundamentals An Ideal Tool for Optimizing Your Vibration Class Curriculum The Vibration Fundamentals Training System
How to Select the Right Positioning Sensor Solution A WHITE PAPER
 How to Select the Right Positioning Sensor Solution A WHITE PAPER Published 10/1/2012 Today s machinery and equipment are continuously evolving, designed to enhance efficiency and built to withstand harsher
How to Select the Right Positioning Sensor Solution A WHITE PAPER Published 10/1/2012 Today s machinery and equipment are continuously evolving, designed to enhance efficiency and built to withstand harsher
Assembly Language. Topic 14 Motion Control. Stepper and Servo Motors
 Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Position Sensors. The Potentiometer.
 Position Sensors In this tutorial we will look at a variety of devices which are classed as Input Devices and are therefore called "Sensors" and in particular those sensors which are Positional in nature
Position Sensors In this tutorial we will look at a variety of devices which are classed as Input Devices and are therefore called "Sensors" and in particular those sensors which are Positional in nature
SRI VENKATESWARA COLLEGE OF ENGINEERING AND TECHNOLOGY
 SRI VENKATESWARA COLLEGE OF ENGINEERING AND TECHNOLOGY DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING IC 6501 CONTROL SYSTEMS UNIT I - SYSTEMS AND THEIR REPRESETNTATION` TWO MARKS QUESTIONS WITH
SRI VENKATESWARA COLLEGE OF ENGINEERING AND TECHNOLOGY DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING IC 6501 CONTROL SYSTEMS UNIT I - SYSTEMS AND THEIR REPRESETNTATION` TWO MARKS QUESTIONS WITH
EG - Engineering Graphics
 Coordinating unit: 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering Teaching unit: 717 - EGE - Department of Engineering Presentation Academic year: Degree: 2018 BACHELOR'S
Coordinating unit: 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering Teaching unit: 717 - EGE - Department of Engineering Presentation Academic year: Degree: 2018 BACHELOR'S
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Lecture 5. In The Name of Allah. Instrumentation. Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 In The Name of Allah Instrumentation Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad Position Sensors Topics to be covered include: v v v v v v Introduction Resistive Displacement
In The Name of Allah Instrumentation Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad Position Sensors Topics to be covered include: v v v v v v Introduction Resistive Displacement
, TECHNOLOGY. SAULT COLLEGE OF APPLIED ARTS SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: ROBOTIC & CONTROL SYSTEMS
 SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
Sensors for Mechatronics
 Sensors for Mechatronics Paul P.L Regtien Hertgelo The Netherlands AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK' OXFORD ELSEVIER PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Contents Preface xi
Sensors for Mechatronics Paul P.L Regtien Hertgelo The Netherlands AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK' OXFORD ELSEVIER PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Contents Preface xi
Sensors & transducers
 Sensors & transducers Prof. H. Arya DEPT. OF AEROSPACE ENGINEERING IIT BOMBAY Sensors Sensors - A device that produces an output signal for the purpose of sensing a physical phenomenon. Sensors are also
Sensors & transducers Prof. H. Arya DEPT. OF AEROSPACE ENGINEERING IIT BOMBAY Sensors Sensors - A device that produces an output signal for the purpose of sensing a physical phenomenon. Sensors are also
Modal damping identification of a gyroscopic rotor in active magnetic bearings
 SIRM 2015 11th International Conference on Vibrations in Rotating Machines, Magdeburg, Germany, 23. 25. February 2015 Modal damping identification of a gyroscopic rotor in active magnetic bearings Gudrun
SIRM 2015 11th International Conference on Vibrations in Rotating Machines, Magdeburg, Germany, 23. 25. February 2015 Modal damping identification of a gyroscopic rotor in active magnetic bearings Gudrun
A Practical Guide to Free Energy Devices
 A Practical Guide to Free Energy Devices Part PatD14: Last updated: 25th February 2006 Author: Patrick J. Kelly This patent application shows the details of a device which it is claimed, can produce sufficient
A Practical Guide to Free Energy Devices Part PatD14: Last updated: 25th February 2006 Author: Patrick J. Kelly This patent application shows the details of a device which it is claimed, can produce sufficient
Application Note 01 - The Electric Encoder
 Application Note 01 - The Electric Encoder DF Product Lines - Angular Position Sensors Document No.: AN-01 Version: 3.0, July 2016 Netzer Precision Motion Sensors Ltd. Misgav Industrial Park, P.O. Box
Application Note 01 - The Electric Encoder DF Product Lines - Angular Position Sensors Document No.: AN-01 Version: 3.0, July 2016 Netzer Precision Motion Sensors Ltd. Misgav Industrial Park, P.O. Box