Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
|
|
|
- Samson Franklin
- 5 years ago
- Views:
Transcription


1


2 Sensors human sensing 5+N senses <link> basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect
3 Human senses Traditional sight smell taste touch hearing Other senses balance acceleration pain pressure/tension time temperature kinesthetic sense internal body senses
4 Sensors local x remote detection (contact x contactless) detection x measurement Is there an obstacle? How far is the obstacle? active x passive
5 Favourite sensors in (mobile) robotics tactile micro switches, end switches, bumpers electrical motor current consumption measurement, induced current sensing/measurement etc. directional acoustic, optical point measurement using detection of reflected beam obstacle detection, environment mapping line sensors directional measurement multiplexed in time cameras image processing MEMS use of microscopic phenomena to replace big mechanical sensors various sensor types (accelerometers / gyros, pressure, temperature, ) also as actuators (pumps, motors ) virtual indirect measurement, using action consequences to detect the action
6 Measurement using signal reflection TOF measuring time needed for the signal to return precise measurement needed phase-shift sending modulated signal, measuring phase shift of reflected signal 2 * π * f * TOF
7 Measurement using signal reflection ultrasonic, infrared, laser, radar intensity measurement possible in addition the signal must get reflected the measurement is active environment vulnerability interferences detectable signal
8 Measurement using signal interruption gate detection of signal reflection (or lack of) reflected signal intensity thresholding

9 Ultrasonic direct TOF measurement is possible measurement range ~ 1 cm 10m multiple reflection detection is possible
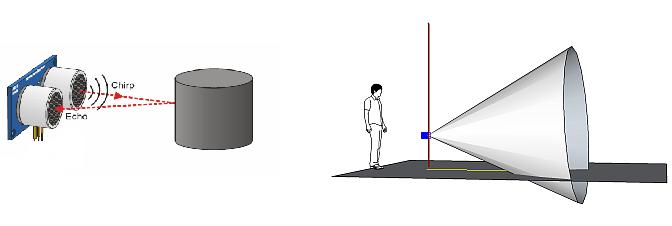
10 Ultrasonic Reality:

11 Infrared PSD beam spread exploitation up to single meters distance measurement illumination problems Example: Sharp GP2D12, GP2Y0A21

12 Infrared single narrow beam reflexive short range CNY-70, QRD1113/4, GP2S60



13 Laser 1D, 2D, 3D rangefinder, scanner 20 km possible



14 Some popular laser rangefinders SICK Hokuyo LMS 100 TIM 310 LMS 400 NAV



15 MEMS components in scale µm accelerometers gyros pressure sensors displays, pumps, engines


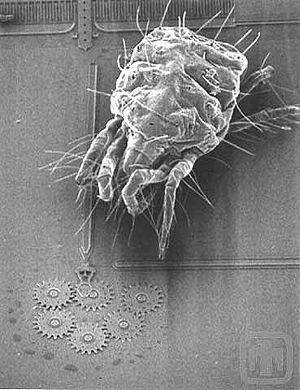
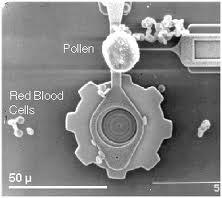
16 MEMS components in scale µm accelerometers gyros pressure sensors displays, pumps, engines
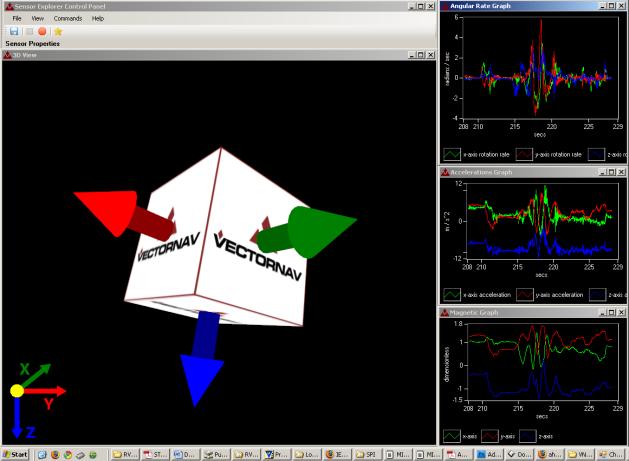
17 MEMS
18 Odometry measurement of distance travelled wheel revolution measurement motor revolutions measurement gearbox! sensing mechanical inductive, capacitive resolver, synchro optical Hall effect sensor

19 Hall effect V H = k I B
20 encoders absolute x relative rate quadrature binary Gray single-track Gray
 number of changes indicates rotation angle frequency of changes")
21 Rate sensor detects change between black/white (or between nothing/reflection, nothing/signal) number of changes indicates rotation angle frequency of changes indicates speed
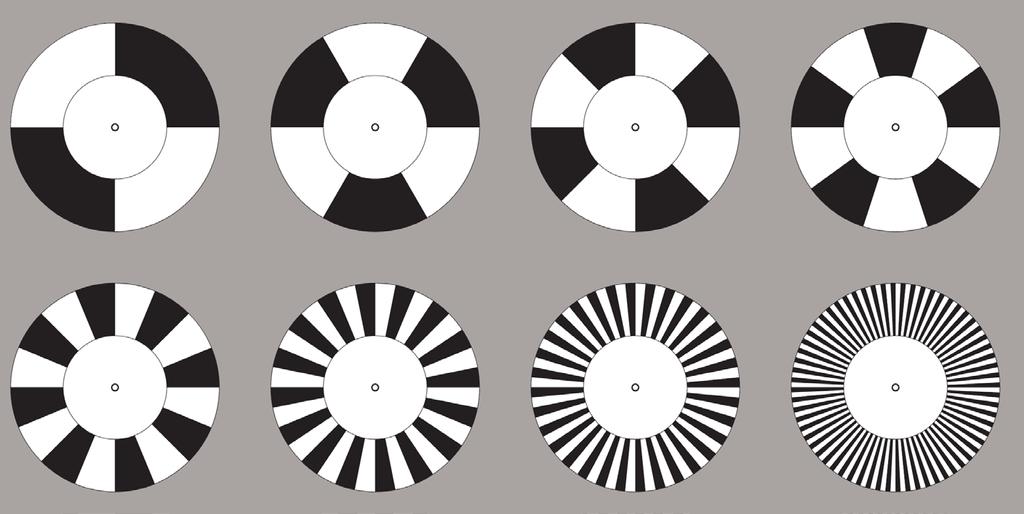
22 Rate
23 PostSript the Mighty /grc 0.5 def /noofarc 4 def /frc 360 noofarc div def /radius 30 def 0 2 noofarc { /pos exch def black 0 0 moveto 0 0 radius pos grc sub frc mul pos 1 grc sub add frc mul arc fill white 0 0 moveto 0 0 radius pos 1 grc sub add frc mul pos 2 add grc sub frc mul arc fill } for




24 Quadrature two sensors two tracks displaced by ½ step, sensors on a cord single track, two sensors displaced by ½ step angle
25 Quadrature clockwise counterclockwise phase A B phase A B
26 How to interpret the signal?


27 Binary more sensors in different tracks problem edges & sensor placement & noise

28 Gray code single change in each step recursive construction 0 + level n reversed level n

29 Binary vs Gray code
30 Single-track Gray code Precision problem At least 9 tracks needed for 1 Gray code precision 1994 N.B.Spedding 2001 Hiltgen, Paterson single-track for 9 sensors, 360 positions
31 Some real encoders Old style computer mouse


32 Some real encoders US Digital E4 E4 Miniature Optical Kit Encoder CPR ( PPR) 2 channel quadrature TTL squarewave out

")
33 Some real encoders Austria Microsystems AS5035 AS5035 Magnetic Rotary Position Sensor 2 quadrature A/B outputs 64 pulses per channel / 256 edges per rev. / 1.4 per step Index output (one pulse per revolution) user-programmable zero position 3.3V / 5V power


34 DIY Encoder sensors CNY70, QRD encoder wheel
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Actuator Components 2
 Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Controlling and modeling of an automated guided vehicle
 Controlling and modeling of an automated guided vehicle Daniel Antal, Ph.D. student Robert Bosch department of mechatronics University of Miskolc Miskolc, Hungary antal.daniel@uni-miskolc.hu Tamás Szabó,
Controlling and modeling of an automated guided vehicle Daniel Antal, Ph.D. student Robert Bosch department of mechatronics University of Miskolc Miskolc, Hungary antal.daniel@uni-miskolc.hu Tamás Szabó,
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
Sensors. CS Embedded Systems p. 1/1
 CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Mechatronics System Design - Sensors
 Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Dimensions: Specifications:
 Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
AC Drive Technology. An Overview for the Converting Industry. Siemens Industry, Inc All rights reserved.
 AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
Data Sheet. AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel. Features. Description. Applications
 AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel Data Sheet Description The AEDB-9340 optical encoder series are six-channel optical incremental encoder modules with codewheel.
AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel Data Sheet Description The AEDB-9340 optical encoder series are six-channel optical incremental encoder modules with codewheel.
Zettlex. Precision in the Extreme
 Zettlex is a sensors company. We design, make and sell sensors & sensor components for position and speed measurement. Flow metering Our company motto is signifying that even in harsh environments, our
Zettlex is a sensors company. We design, make and sell sensors & sensor components for position and speed measurement. Flow metering Our company motto is signifying that even in harsh environments, our
Lecture: Sensors , Fall 2008
 All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities.
 Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Data Sheet. AEDS-9240 Series 360/720 CPR Commutation Encoder Module. Features. Description. Applications
 AEDS-9240 Series 360/720 CPR Commutation Encoder Module Data Sheet Description The AEDS-9240 optical encoder is a six channel optical incremental encoder module. When used with a codewheel, this encoder
AEDS-9240 Series 360/720 CPR Commutation Encoder Module Data Sheet Description The AEDS-9240 optical encoder is a six channel optical incremental encoder module. When used with a codewheel, this encoder
87000 Series Size 34 Hybrid Linear Actuators
 87000 Series Single Stack Stepper Motor Linear Actuators 87000 Series Hybrid Linear Actuators Our largest, most powerful linear actuator incorporates the same precision, high performance and durable patented
87000 Series Single Stack Stepper Motor Linear Actuators 87000 Series Hybrid Linear Actuators Our largest, most powerful linear actuator incorporates the same precision, high performance and durable patented
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Data Sheet. AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder. Description. Features.
 AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
Design Project Introduction DE2-based SecurityBot
 Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
echo-based range sensing L06Ua echo-based range sensing 1
 echo-based range sensing mws@cmu.edu 16722 20080228 L06Ua echo-based range sensing 1 example: low-cost radar automotive DC in / digital radar signal out applications include pedestrians / bicycles in urban
echo-based range sensing mws@cmu.edu 16722 20080228 L06Ua echo-based range sensing 1 example: low-cost radar automotive DC in / digital radar signal out applications include pedestrians / bicycles in urban
Make: Sensors. Tero Karvinen, Kimmo Karvinen, and Ville Valtokari. (Hi MAKER MEDIA SEBASTOPOL. CA
 Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
By Pierre Olivier, Vice President, Engineering and Manufacturing, LeddarTech Inc.
 Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Whitepaper EncoderBlue goes reflective
 Whitepaper EncoderBlue goes reflective With the continuously increasing adoption of automated machinery in various applications, positioning devices are becoming an essential part of many systems. For
Whitepaper EncoderBlue goes reflective With the continuously increasing adoption of automated machinery in various applications, positioning devices are becoming an essential part of many systems. For
IN THE NAME OF GOD. Instrumentation Term Project. Supervised By: Dr. Hamid D. Taghirad
 IN THE NAME OF GOD Instrumentation Term Project Supervised By: Dr. Hamid D. Taghirad Magnetic position sensor Ehsan Peymani Golnaz Habibi Magnetic Sensor Feature of Magnetic Sensors Advantage - Contact
IN THE NAME OF GOD Instrumentation Term Project Supervised By: Dr. Hamid D. Taghirad Magnetic position sensor Ehsan Peymani Golnaz Habibi Magnetic Sensor Feature of Magnetic Sensors Advantage - Contact
SMART SENSORS AND MEMS
 2 SMART SENSORS AND MEMS Dr. H. K. Verma Distinguished Professor (EEE) Sharda University, Greater Noida (Formerly: Deputy Director and Professor of Instrumentation Indian Institute of Technology Roorkee)
2 SMART SENSORS AND MEMS Dr. H. K. Verma Distinguished Professor (EEE) Sharda University, Greater Noida (Formerly: Deputy Director and Professor of Instrumentation Indian Institute of Technology Roorkee)
Data Sheet. AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR. Description.
 AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR Data Sheet Description The AEDT-9140 series are three channel optical incremental encoder modules.
AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR Data Sheet Description The AEDT-9140 series are three channel optical incremental encoder modules.
Critical Design Review: M.A.D. Dog. Nicholas Maddy Timothy Dayley Kevin Liou
 Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Size 23 Single Stack. Captive Shaft. 57H6 n n n n n n. 57F6 n n n n n n. E57H6 n n n n n n 12 VDC 5 VDC 1.3 A .54 A 22.2 Ω. 5.3 mh.
 HAYD: 0 756 7 Single Stack Stepper Motor Linear Actuator Haydon 57000 Series hybrid linear actuators for applications that require forces up to 00 lbs. (890 N). Single Stack External Linear The Haydon
HAYD: 0 756 7 Single Stack Stepper Motor Linear Actuator Haydon 57000 Series hybrid linear actuators for applications that require forces up to 00 lbs. (890 N). Single Stack External Linear The Haydon
VeraPath Optical Encoder Technology
 TECHNICAL NOTES: OPTICAL TECHNOLOGIES VeraPath Optical Encoder Technology TN-1002 REV 160602 The Challenge MicroE s PurePrecision technology has enabled designers of precision motion control systems in
TECHNICAL NOTES: OPTICAL TECHNOLOGIES VeraPath Optical Encoder Technology TN-1002 REV 160602 The Challenge MicroE s PurePrecision technology has enabled designers of precision motion control systems in
Shock Sensor Module This module is digital shock sensor. It will output a high level signal when it detects a shock event.
 Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
Smart off axis absolute position sensor solution and UTAF piezo motor enable closed loop control of a miniaturized Risley prism pair
 Smart off axis absolute position sensor solution and UTAF piezo motor enable closed loop control of a miniaturized Risley prism pair By David Cigna and Lisa Schaertl, New Scale Technologies Hall effect
Smart off axis absolute position sensor solution and UTAF piezo motor enable closed loop control of a miniaturized Risley prism pair By David Cigna and Lisa Schaertl, New Scale Technologies Hall effect
SENSORS Timing signal (e.g. PWM) Serial link (RS232 or USB) Table 2.1: Sensor output
 Serial link (RS232 or USB) Table 2.1: Sensor output") SENSORS............................................ 2 There are a vast number of different sensors being used in robotics, applying different measurement techniques, and using different interfaces to a
SENSORS............................................ 2 There are a vast number of different sensors being used in robotics, applying different measurement techniques, and using different interfaces to a
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
LEAD SCREW LINEAR ACTUATORS Profile Rail Linear Actuators
 LEAD SCREW LINEAR ACTUATORS Profile Rail Linear Actuators ITAR Helix Linear Technologies, Inc., Beachwood, Ohio COMPANY CULTURE Helix is a global supplier to the Medical Device, Life Science, Security,
LEAD SCREW LINEAR ACTUATORS Profile Rail Linear Actuators ITAR Helix Linear Technologies, Inc., Beachwood, Ohio COMPANY CULTURE Helix is a global supplier to the Medical Device, Life Science, Security,
Size 23 Double Stack External Linear Size 23 Double Stack. 57M4 n n n n n n. 57L4 n n n n n n. E57M4 n n n n n n. Bipolar 5 VDC 12 VDC 2.
 HAYD: 0 756 7 57000 Series: Double Stack Stepper Motor Linear Actuator Haydon 57000 Series Double Stack hybrid linear actuators deliver greater performance in a compact size. The various patented designs
HAYD: 0 756 7 57000 Series: Double Stack Stepper Motor Linear Actuator Haydon 57000 Series Double Stack hybrid linear actuators deliver greater performance in a compact size. The various patented designs
Optical Kit Encoder Page 1 of 5. Description. Features
 Description Page 1 of 5 The E5 Series rotary encoder has a molded polycarbonate enclosure with either a 5-pin or 10-pin latching connector. This optical incremental encoder is designed to easily mount
Description Page 1 of 5 The E5 Series rotary encoder has a molded polycarbonate enclosure with either a 5-pin or 10-pin latching connector. This optical incremental encoder is designed to easily mount
Microscopic Laser Doppler Vibrometer
 Microscopic Laser Doppler Vibrometer System Configuration - 1 PC Controller (APU-Analog processing unit, DPU-Digital processing unit) Optic Head (MEMS Type, XS Type) Function Generator Power Supply Testing
Microscopic Laser Doppler Vibrometer System Configuration - 1 PC Controller (APU-Analog processing unit, DPU-Digital processing unit) Optic Head (MEMS Type, XS Type) Function Generator Power Supply Testing
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Chapter 6: Sensors and Control
 Chapter 6: Sensors and Control One of the integral parts of a robot that transforms it from a set of motors to a machine that can react to its surroundings are sensors. Sensors are the link in between
Chapter 6: Sensors and Control One of the integral parts of a robot that transforms it from a set of motors to a machine that can react to its surroundings are sensors. Sensors are the link in between
28000 Series Size 11 Double Stack Hybrid Linear Actuators
 28000 Series Double Stack Stepper Motor Linear Actuators 28000 Series Double Stack Hybrid Linear Actuators Enhanced performance in motion control The 28000 Series is available in a wide variety of resolutions
28000 Series Double Stack Stepper Motor Linear Actuators 28000 Series Double Stack Hybrid Linear Actuators Enhanced performance in motion control The 28000 Series is available in a wide variety of resolutions
Robotics Intelligent sensors (part 1)
") Robotics Intelligent sensors (part 1) Tullio Facchinetti Tuesday 29 th November, 2016 http://robot.unipv.it/toolleeo Position sensors position sensors allow the measurement
Robotics Intelligent sensors (part 1) Tullio Facchinetti Tuesday 29 th November, 2016 http://robot.unipv.it/toolleeo Position sensors position sensors allow the measurement
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
Recent Innovations in MEMS Sensors for PNT Applications
 Recent Innovations in MEMS Sensors for PNT Applications Stanford PNT Symposium 2017 Alissa M. Fitzgerald, Ph.D. Founder & CEO amf@amfitzgerald.com Overview Navigation Developments in MEMS gyroscope technology
Recent Innovations in MEMS Sensors for PNT Applications Stanford PNT Symposium 2017 Alissa M. Fitzgerald, Ph.D. Founder & CEO amf@amfitzgerald.com Overview Navigation Developments in MEMS gyroscope technology
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Industrial Sensors. Proximity Mechanical Optical Inductive/Capacitive. Position/Velocity Potentiometer LVDT Encoders Tachogenerator
 Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
43000 Series: Size 17 Single Stack Stepper Motor Linear Actuator
 HAYD: 2 756 744 4 Series: Single Stack Stepper Motor Linear Actuator Haydon 4 Series hybrid linear actuators are our best selling compact hybrid motors. Single Stack Captive Shaft These top selling designs
HAYD: 2 756 744 4 Series: Single Stack Stepper Motor Linear Actuator Haydon 4 Series hybrid linear actuators are our best selling compact hybrid motors. Single Stack Captive Shaft These top selling designs
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems
 Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Electronic Instrumentation and Measurements
 Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Size 11 Double Stack. Captive Shaft. Bipolar 5 VDC 12 VDC. 750 ma. 313 ma 6.7 Ω 34.8 Ω. 5.8 mh mh. 7.5 W Total gcm 2
 HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Double Stack Stepper Motor Linear Actuator Haydon Size Double Stack hybrid linear actuators for enhanced performance in motion control Three designs are, captive,
HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Double Stack Stepper Motor Linear Actuator Haydon Size Double Stack hybrid linear actuators for enhanced performance in motion control Three designs are, captive,
Classifying 3D Input Devices
 IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Motivation The mouse and keyboard
IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Motivation The mouse and keyboard
Velocity and Acceleration Measurements
 Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
43000 Series: Size 17 Linear Actuator. Haydon Series Size 17 hybrid linear actuators are our best selling compact hybrid motors.
 Size 17 Captive Shaft 43000 Series: Size 17 Linear Actuator Haydon 43000 Series Size 17 hybrid linear actuators are our best selling compact hybrid motors. The various patented designs deliver high performance,
Size 17 Captive Shaft 43000 Series: Size 17 Linear Actuator Haydon 43000 Series Size 17 hybrid linear actuators are our best selling compact hybrid motors. The various patented designs deliver high performance,
Agilent AEDS-962x for 150 LPI Ultra Small Optical Encoder Modules
 Agilent AEDS-962x for 150 LPI Ultra Small Optical Encoder Modules Data Sheet Description This is a very small, low package height and high performance incremental encoder module. When operated in conjunction
Agilent AEDS-962x for 150 LPI Ultra Small Optical Encoder Modules Data Sheet Description This is a very small, low package height and high performance incremental encoder module. When operated in conjunction
Data Sheet. HEDB-9100 and HEDB-9000 Two Channel Optical Incremental Encoder Modules Bundle With Codewheel. Description. Features.
 HEDB-9100 and HEDB-9000 Two Channel Optical Incremental Encoder Modules Bundle With Codewheel Data Sheet Description The HEDB-9100 and HEDB-9000 series are two channel optical incremental encoder modules
HEDB-9100 and HEDB-9000 Two Channel Optical Incremental Encoder Modules Bundle With Codewheel Data Sheet Description The HEDB-9100 and HEDB-9000 series are two channel optical incremental encoder modules
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
The quadrature signals and the index pulse are accessed through five inch square pins located on 0.1 inch centers.
 Quick Assembly Two and Three Channel Optical Encoders Technical Data HEDM-550x/560x HEDS-550x/554x HEDS-560x/564x Features Two Channel Quadrature Output with Optional Index Pulse Quick and Easy Assembly
Quick Assembly Two and Three Channel Optical Encoders Technical Data HEDM-550x/560x HEDS-550x/554x HEDS-560x/564x Features Two Channel Quadrature Output with Optional Index Pulse Quick and Easy Assembly
Automatic Control System
 Sensor types Automatic Control System Automatic Control System Construction Material or Power Object Output Signal Sensor Disturbances Converter Measuring Device Controller Industry Controller Executive
Sensor types Automatic Control System Automatic Control System Construction Material or Power Object Output Signal Sensor Disturbances Converter Measuring Device Controller Industry Controller Executive
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
35H6 n n n n n n. 35F6 n n n n n n. E35H6 n n n n n n. Unipolar** 5 VDC 12 VDC 0.24 A 0.57 A. 30 mh. 6.5 mh 5.7 W gcm 2
 HAYD: 0 756 7 5000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon 5000 Series Size hybrid linear actuators have been improved to provide higher force, longer life and improved performance.
HAYD: 0 756 7 5000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon 5000 Series Size hybrid linear actuators have been improved to provide higher force, longer life and improved performance.
28H6 n n n n n n. 28F6 n n n n n n. E28H6 n n n n n n 12 VDC 5 VDC 0.18 A 0.42 A 68.6 Ω. 3.3 mh mh 4.2 W. Class B (Class F available)
") HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon Size hybrid linear actuators offer compact, production-proven precision in motion The various patented designs
HAYD: 0 756 7 KERK: 60 690 8000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon Size hybrid linear actuators offer compact, production-proven precision in motion The various patented designs
Incremental encoders With blind or through hollow shaft pulses per revolution programmable
 Features Size mm Precise optical sensing Output signal level programmable (TTL or HTL) Blind or through hollow shaft, ø8 15 mm Connection axial, radial or tangential Pulses per revolution 1...65536, programmable
Features Size mm Precise optical sensing Output signal level programmable (TTL or HTL) Blind or through hollow shaft, ø8 15 mm Connection axial, radial or tangential Pulses per revolution 1...65536, programmable
Touchscreens, tablets and digitizers. RNDr. Róbert Bohdal, PhD.
 Touchscreens, tablets and digitizers RNDr. Róbert Bohdal, PhD. 1 Touchscreen technology 1965 Johnson created device with wires, sensitive to the touch of a finger, on the face of a CRT 1971 Hurst made
Touchscreens, tablets and digitizers RNDr. Róbert Bohdal, PhD. 1 Touchscreen technology 1965 Johnson created device with wires, sensitive to the touch of a finger, on the face of a CRT 1971 Hurst made
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Chapter 36: diffraction
 Chapter 36: diffraction Fresnel and Fraunhofer diffraction Diffraction from a single slit Intensity in the single slit pattern Multiple slits The Diffraction grating X-ray diffraction Circular apertures
Chapter 36: diffraction Fresnel and Fraunhofer diffraction Diffraction from a single slit Intensity in the single slit pattern Multiple slits The Diffraction grating X-ray diffraction Circular apertures
Micromouse Meeting #3 Lecture #2. Power Motors Encoders
 Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
, TECHNOLOGY. SAULT COLLEGE OF APPLIED ARTS SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: ROBOTIC & CONTROL SYSTEMS
 SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
Introduction to Embedded Systems
 Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Application Note Using MagAlpha Devices to Replace Optical Encoders
 Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Optical Shaft Encoder Page 1 of 6. Description. Mechanical Drawing. Features EH-1014.pdf EH-1014
 Description Page 1 of 6 The series optical shaft encoder is a non-contacting rotary to digital converter. Useful for position feedback or manual interface, the encoder converts real-time shaft angle, speed,
Description Page 1 of 6 The series optical shaft encoder is a non-contacting rotary to digital converter. Useful for position feedback or manual interface, the encoder converts real-time shaft angle, speed,
RM36. Rotation sensors RM36 Absolute rotary encoder
 Rotation sensors RM36 Absolute rotary encoder RM36 Description The RM36 is a high-speed magnetic rotary encoder designed for use in harsh industrial environments. The non-contact two-part design removes
Rotation sensors RM36 Absolute rotary encoder RM36 Description The RM36 is a high-speed magnetic rotary encoder designed for use in harsh industrial environments. The non-contact two-part design removes
3D User Interfaces. Using the Kinect and Beyond. John Murray. John Murray
 Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Electronics II. Calibration and Curve Fitting
 Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor