Lecture: Sensors , Fall 2008
|
|
|
- Ethel Melton
- 6 years ago
- Views:
Transcription

1 All images are in the public domain and were obtained from the web unless otherwise cited , Fall 2008
2 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception processing preview Summary 2
3 Open Loop Control No sensing input Cognition Action 3


4 Why Sense? To acquire information about the environment and oneself Open loop control suffers from Uncertainty, changes in the world Error detection and correction
5 The Sensing Loop Feedback control Cognition Perception (Sensing) Control loop Action 5
6 Issues to Address What sensors to use? How to model the sensor? How to calibrate intrinsic/extrinsic models? What low-level processing? What high-level processing (perception)? 6


7 Comparison: Human Sensors Sense: Sensor: Vision Eyes Audition Ears Gustation Tongue Olfaction Nose Tactition Skin
8 Robot Sensors Sense: Sensor: Equilibrioception Accelerometer Proprioception Encoders Magnetoception Magnetometer Electroception Voltage sensor Echolocation Sonar Pressure gradient Array of pressure sensors

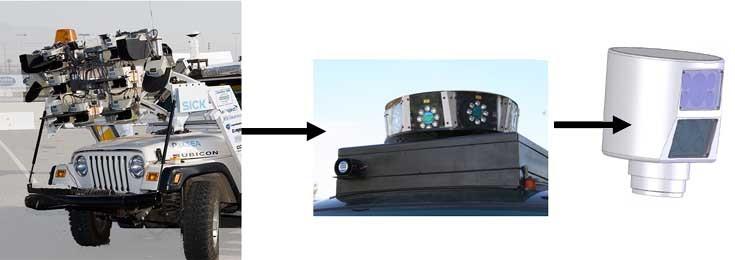
9 LiDar Sensing

10 LiDar Variations Tartan Racing Team
 Carnegie Mellon Mine Mapping Project Ocean explorer www.oceanexplorer.noaa.")
11 Sensor Examples (CMU) Tartan Racing Urban Challenge vehicle Groundhog, subterranean mapping (CMU) Carnegie Mellon Mine Mapping Project Ocean explorer 11



12 Popular Sensors in Robotics LiDar Infrared Radar Sonar Cameras GPS Accelerometers Gyros, encoders Contact switch 12

13 Auditory d1 d2 d3 d1>d2>d3




14 Other Robot Sensors Linear Encoder Gyroscope GPS PIR Lever Switch Accelerometer Resistive Bend Rotary Encoder Piezo Bend UV Detector Pendulum Resistive Tilt Pressure Pyroelectric Detector Gas Radiation IR Modulator Receiver Magnetic Reed Switch CDS Cell Metal Detector Compass Magnetometer
15 Sensing Classification Extereoceptive Proprioceptive Gyroscope Active Passive Accelerometers Laser/LiDar Vision Odometers Sonar Microphone array Voltage sensors Radar Chemical sensors Stress/strain gauge Structured light Tactile sensor InfraRed
16 Sensors We Will Look At Today Exterioceptive Sonar, LiDar, IR Vision comes later Proprioceptive Encoders Accelerometers Gyroscopes GPS (hard to categorize) Micro-switch 16
17 SoNaR: Sound Navigation and Ranging Often called sonar, ultrasound, Sodar Emit a directional sound wave, and listen for echo(s), time the response T=0 17
18 Sonar Sensors T=0.01s 18
19 Sonar Sensors T=0.06s 19
20 Sonar Sensors T=0.07s Reflect at hard surface 20
21 Sonar Sensors T=0.12s Echo detected at receiver 21
22 Sonar Sensors Key assumption: sound travels at constant speed v=344 m/s (dry air, 21C, sea-level) So we have 1 d= v T 2 22
23 Power of Returned Signal Signal power dissipates as wave travels Depends upon the shape of the wavefront Driven by shape of transmitter (same for radar) Typically a directional cone d 2 2 Area= r = [d tan ] d 2 2 α 23
24 Reflection Strength Function of surface angle and surface properties Surface Normal Reflected wave Return strength Incoming beam Loss of signal strength through reflection e.g. cardboard vs. tile Surface may disperse reflected wave leading to reduced signal strength and wider return beam 24
25 How To Detect the Echo? Electronic signal processing Detect sufficiently large rapid change Signal strength fn of distance, surface, surface angle Signal Strength Primary return Secondary t echo 25
26 Imperfect Sensing What can go wrong? Speed of sound changes with temperature, pressure, humidity kt v ideal = m Surface reflection properties Atmospheric attenuation (finite range) Multiple echoees (multi-path) Quantization in timing Inaccuracies in detecting response signal onset Cross-talk (echoes from other sensors) 26
27 Sensor Noise Fixed object, sensor returns different values over time => random process 27
28 Bigger Picture: Perception Given sensor readings, how does robot determine the structure and content of the world? Usual way is to model the problem Measurements Sensor Physics Sensor Model Filtering Robot's model of world 28
29 Sensor Model Model the device physics to obtain the expected device properties and parameters Intrinsic model: Device itself Extrinsic model: Where the device is on the robot Collect data and fit model parameters This is calibration Level of complexity is a trade off Computation, accuracy, reliability, domain knowledge Often need to reason explicitly about uncertainty 29
30 Modeling Sonar What should we model? Usually: Mapping from time to range (first return only) We have a physics model with parameters. Calibrate to get parameter values. Model sensor uncertainty How do we do this? What distribution should we use? Other possibilities: Signal strength to surface orientation? Using secondary peaks? Profile of response? 30
31 Calibration We have a model Derived from the physics (best approach) Look at data and guess a low dimensional model Estimate the parameters from a known setup Measure signal response at different distances Optionally different angles, surfaces, humidity, altitude... Fit parameters to the data (e.g. regression) Outlier True model d 1 d= vt 2 Robust regression d = 1 T 0 T 31
32 Sensor Noise Modeling Sensors are never perfect Unmodeled effects True randomness in the environment, robot, and sensing process Systematic errors (bias) Drift, jumps 32
33 Sensor Bias Return may vary as a function of physical setup Surface material/color, orientation, range, atmosphere threshold Missed detection Changing shape of return signal due to surface properties/orientation affect how range is detected 33
34 Sensor Noise Model Enter the world of statistics Usually choose a parametric model and estimate parameters e.g. Gaussian 34
35 Sensor Filtering Usually apply some level of filtering to raw sensor data before feeding into rest of system Examples Thresholding you've already seen this Smoothing simple filters Kalman filtering more complex filter exploiting additional domain knowledge Resulting estimate used to build perception models Occupancy grids, trackers, etc. 35
36 LiDar Light Detection and Ranging Different variants, we'll focus on time to return Most common to robotics Same model as Sonar Surface Narrow pules of laser light

37 LiDar Timed echo from reflection Speed of light >> speed of sound c vaccum= 3x10 m.s 0 0 Reflected light Surface T d= 2c
38 SICK LiDar Very common unit Spinning mirror assembly gives line scan Ranges vary (90, 180 degree, 50+m) Scanning rates vary (e.g. 20Hz, 75Hz) Resolutions (e.g degree, 10mm) Accuracy ~30mm stdev in range Spinning mirror




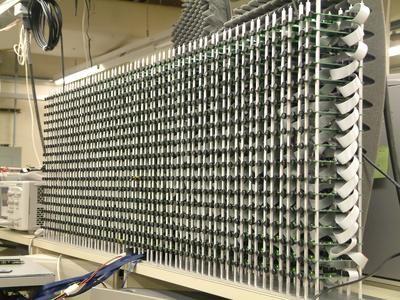
39 SICK LiDar Internals From

40 LiDar Returns and Material cardboard glass/water Mirror 40

41 LiDar Variations NREC Crusher Vehicle


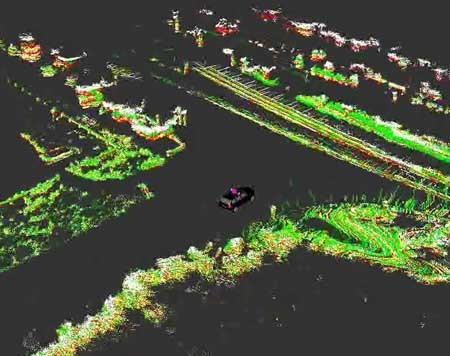
42 Colorized LiDar Used a lot on NREC robots 42
43 InfraRed Emitter/detector pair Output type Digital (strength of return threshold) Analog range using triangulation Usually short-range (<1m) Can be sensitive to IR sources e.g. sun
44 Sharp IR Sensor Object Linear CCD Emitter
45 Proprioceptive Sensors
46 Optical Encoders Disc to measure rotational motion Out of phase IR emitter/detector pair A Radius r φ n B d 46

47 Optical Encoders Direction and amount of rotation from edge transitions Radius r A φ n B d 47
48 In Practice Electronic hardware (MCU or ASIC) provides counting, de-bouncing Estimate speed by sampling encoder counts Model to provide wheel speed from encoder counts How to get vehicle speeds from wheel speeds? This is kinematics! (Later in the course) 48
49 Gyroscopes Proprioceptive sensor Maintaining estimate of orientation Mechanical devices Fiber optic gyroscope Vibrating gyroscope (e.g. MEMS) 49
50 50
51 Accelerometers Measure acceleration in a direction of travel Typically MEMS device Also measures gravity Good old relativity... Can use with gyroscopes to remove gravity component Typically very noisy Need to double integrate to get position 51
52 Accelerometers 52
53 Issues With Accelerometers/Gyros Noise Output readings may have approximately additive Gaussian noise Drift Signal drifts from true value over time Gyro heading Usually need to integrate accelerometers 53


54 GPS/Glonas/Galileo Orbiting satellites Known trajectories Highly precise timers Transmit data in Ghz band Ephemeris information Develop pseudo range to satellite Solve for receiver position Can also solve for velocity 54
55 GPS Properties Many causes of error Ionospheric effects, line of site clearance Delays in satellite positional updates, multi-path Is it Gaussian? Over hours, approximately Gaussian errors Over short time, small error but strong bias Improvements DGPS, WAAS (~3m accuracy at 3 sigma) Use an INS (Accelerometers/gyros) 55
56 GPS/INS Commercial solutions exist (expensive!) Fuse integrated INS estimates with GPS A big custom Kalman filter (more later) GPS Acc., Gyro, Compass Kalman Filter Pose output 56
57 Summary Know about A whole class of sensors Typical problems with sensors, and sensor uncertainty Basic approach to modeling a sensor Basic filtering techniques 57
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
MEM380 Applied Autonomous Robots I Fall Introduction to Sensors & Perception
 MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Introduction to ROBOTICS. Robot Sensing and Sensors
 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu 1 Brief Review (Mobot Locomotion) 2 ICR of wheeled
Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu 1 Brief Review (Mobot Locomotion) 2 ICR of wheeled
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
MEMS Solutions For VR & AR
 MEMS Solutions For VR & AR Sensor Expo 2017 San Jose June 28 th 2017 MEMS Sensors & Actuators at ST 2 Motion Environmental Audio Physical change Sense Electro MEMS Mechanical Signal Mechanical Actuate
MEMS Solutions For VR & AR Sensor Expo 2017 San Jose June 28 th 2017 MEMS Sensors & Actuators at ST 2 Motion Environmental Audio Physical change Sense Electro MEMS Mechanical Signal Mechanical Actuate
Degree of mobility Degree of steerability
 1 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu Brief Review (Mobot Locomotion) 1 2 ICR of
1 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu Brief Review (Mobot Locomotion) 1 2 ICR of
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
SENSOR. Definition. Basics. There are a lot of different types of sensors. Sensors are used in everyday objects.
 SENSOR Definition A sensor is a device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. Basics A sensor is a device that measures a
SENSOR Definition A sensor is a device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. Basics A sensor is a device that measures a
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Introduction to Embedded Systems
 Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input
 IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Lecture Notes Prepared by Prof. J. Francis Spring Remote Sensing Instruments
 Lecture Notes Prepared by Prof. J. Francis Spring 2005 Remote Sensing Instruments Material from Remote Sensing Instrumentation in Weather Satellites: Systems, Data, and Environmental Applications by Rao,
Lecture Notes Prepared by Prof. J. Francis Spring 2005 Remote Sensing Instruments Material from Remote Sensing Instrumentation in Weather Satellites: Systems, Data, and Environmental Applications by Rao,
Ubiquitous Positioning: A Pipe Dream or Reality?
 Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Study of small scale plasma irregularities. Đorđe Stevanović
 Study of small scale plasma irregularities in the ionosphere Đorđe Stevanović Overview 1. Global Navigation Satellite Systems 2. Space weather 3. Ionosphere and its effects 4. Case study a. Instruments
Study of small scale plasma irregularities in the ionosphere Đorđe Stevanović Overview 1. Global Navigation Satellite Systems 2. Space weather 3. Ionosphere and its effects 4. Case study a. Instruments
Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry. 28 April 2003
 Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry 28 April 2003 Outline Passive Microwave Radiometry Rayleigh-Jeans approximation Brightness temperature Emissivity and dielectric constant
Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry 28 April 2003 Outline Passive Microwave Radiometry Rayleigh-Jeans approximation Brightness temperature Emissivity and dielectric constant
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems
 Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
Introduction. Learning Objectives. On completion of this class you will be able to. 1. Define fiber sensor. 2. List the different types fiber sensors
 Introduction Learning Objectives On completion of this class you will be able to 1. Define fiber sensor 2. List the different types fiber sensors 3. Mech-Zender Fiber optic interferometer Fiber optic sensor
Introduction Learning Objectives On completion of this class you will be able to 1. Define fiber sensor 2. List the different types fiber sensors 3. Mech-Zender Fiber optic interferometer Fiber optic sensor
Mechatronics System Design - Sensors
 Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Design of Accurate Navigation System by Integrating INS and GPS using Extended Kalman Filter
 Design of Accurate Navigation System by Integrating INS and GPS using Extended Kalman Filter Santhosh Kumar S. A 1, 1 M.Tech student, Digital Electronics and Communication Systems, PES institute of technology,
Design of Accurate Navigation System by Integrating INS and GPS using Extended Kalman Filter Santhosh Kumar S. A 1, 1 M.Tech student, Digital Electronics and Communication Systems, PES institute of technology,
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
If you want to use an inertial measurement system...
 If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
Section 1: Sound. Sound and Light Section 1
 Sound and Light Section 1 Section 1: Sound Preview Key Ideas Bellringer Properties of Sound Sound Intensity and Decibel Level Musical Instruments Hearing and the Ear The Ear Ultrasound and Sonar Sound
Sound and Light Section 1 Section 1: Sound Preview Key Ideas Bellringer Properties of Sound Sound Intensity and Decibel Level Musical Instruments Hearing and the Ear The Ear Ultrasound and Sonar Sound
Recent Innovations in MEMS Sensors for PNT Applications
 Recent Innovations in MEMS Sensors for PNT Applications Stanford PNT Symposium 2017 Alissa M. Fitzgerald, Ph.D. Founder & CEO amf@amfitzgerald.com Overview Navigation Developments in MEMS gyroscope technology
Recent Innovations in MEMS Sensors for PNT Applications Stanford PNT Symposium 2017 Alissa M. Fitzgerald, Ph.D. Founder & CEO amf@amfitzgerald.com Overview Navigation Developments in MEMS gyroscope technology
By Pierre Olivier, Vice President, Engineering and Manufacturing, LeddarTech Inc.
 Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Sonic Distance Sensors
 Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
INDOOR USER ZONING AND TRACKING IN PASSIVE INFRARED SENSING SYSTEMS. Gianluca Monaci, Ashish Pandharipande
 20th European Signal Processing Conference (EUSIPCO 2012) Bucharest, Romania, August 27-31, 2012 INDOOR USER ZONING AND TRACKING IN PASSIVE INFRARED SENSING SYSTEMS Gianluca Monaci, Ashish Pandharipande
20th European Signal Processing Conference (EUSIPCO 2012) Bucharest, Romania, August 27-31, 2012 INDOOR USER ZONING AND TRACKING IN PASSIVE INFRARED SENSING SYSTEMS Gianluca Monaci, Ashish Pandharipande
Velocity and Acceleration Measurements
 Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications
 Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications Yong Li 1, Augustine Tsai 2, Peter Mumford 1, Wei-sen Lin 2, I-chou Hong 2 1 School of Surveying
Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications Yong Li 1, Augustine Tsai 2, Peter Mumford 1, Wei-sen Lin 2, I-chou Hong 2 1 School of Surveying
MOBILE COMPUTING. Transducer: a device which converts one form of energy to another
 MOBILE COMPUTING CSE 40814/60814 Fall 2015 Basic Terms Transducer: a device which converts one form of energy to another Sensor: a transducer that converts a physical phenomenon into an electric signal
MOBILE COMPUTING CSE 40814/60814 Fall 2015 Basic Terms Transducer: a device which converts one form of energy to another Sensor: a transducer that converts a physical phenomenon into an electric signal
Chapter 2 Sensors. The Author(s) 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2
 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2") Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
CSE 165: 3D User Interaction. Lecture #7: Input Devices Part 2
 CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
Migrating from the 3DM-GX3 to the 3DM-GX4
 LORD TECHNICAL NOTE Migrating from the 3DM-GX3 to the 3DM-GX4 How to introduce LORD MicroStrain s newest inertial sensors into your application Introduction The 3DM-GX4 is the latest generation of the
LORD TECHNICAL NOTE Migrating from the 3DM-GX3 to the 3DM-GX4 How to introduce LORD MicroStrain s newest inertial sensors into your application Introduction The 3DM-GX4 is the latest generation of the
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture - 03 Sensing So, we have already understood the basics
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture - 03 Sensing So, we have already understood the basics
Introduction to Mobile Sensing Technology
 Introduction to Mobile Sensing Technology Kleomenis Katevas k.katevas@qmul.ac.uk https://minoskt.github.io Image by CRCA / CNRS / University of Toulouse In this talk What is Mobile Sensing? Sensor data,
Introduction to Mobile Sensing Technology Kleomenis Katevas k.katevas@qmul.ac.uk https://minoskt.github.io Image by CRCA / CNRS / University of Toulouse In this talk What is Mobile Sensing? Sensor data,
Electronics II. Calibration and Curve Fitting
 Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Signal Characteristics and Conditioning
 Signal Characteristics and Conditioning Starting from the sensors, and working up into the system:. What characterizes the sensor signal types. Accuracy and Precision with respect to these signals 3. General
Signal Characteristics and Conditioning Starting from the sensors, and working up into the system:. What characterizes the sensor signal types. Accuracy and Precision with respect to these signals 3. General
Fiberoptic and Waveguide Sensors
 Fiberoptic and Waveguide Sensors Wei-Chih Wang Department of Mecahnical Engineering University of Washington Optical sensors Advantages: -immune from electromagnetic field interference (EMI) - extreme
Fiberoptic and Waveguide Sensors Wei-Chih Wang Department of Mecahnical Engineering University of Washington Optical sensors Advantages: -immune from electromagnetic field interference (EMI) - extreme
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
3D Optical Motion Analysis of Micro Systems. Heinrich Steger, Polytec GmbH, Waldbronn
 3D Optical Motion Analysis of Micro Systems Heinrich Steger, Polytec GmbH, Waldbronn SEMICON Europe 2012 Outline Needs and Challenges of measuring Micro Structure and MEMS Tools and Applications for optical
3D Optical Motion Analysis of Micro Systems Heinrich Steger, Polytec GmbH, Waldbronn SEMICON Europe 2012 Outline Needs and Challenges of measuring Micro Structure and MEMS Tools and Applications for optical
3DM-GX4-45 LORD DATASHEET. GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights. Features and Benefits. Applications
 Product Highlights. Features and Benefits. Applications") LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Design of a Free Space Optical Communication Module for Small Satellites
 Design of a Free Space Optical Communication Module for Small Satellites Ryan W. Kingsbury, Kathleen Riesing Prof. Kerri Cahoy MIT Space Systems Lab AIAA/USU Small Satellite Conference August 6 2014 Problem
Design of a Free Space Optical Communication Module for Small Satellites Ryan W. Kingsbury, Kathleen Riesing Prof. Kerri Cahoy MIT Space Systems Lab AIAA/USU Small Satellite Conference August 6 2014 Problem
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Keywords. DECCA, OMEGA, VOR, INS, Integrated systems
 Keywords. DECCA, OMEGA, VOR, INS, Integrated systems 7.4 DECCA Decca is also a position-fixing hyperbolic navigation system which uses continuous waves and phase measurements to determine hyperbolic lines-of
Keywords. DECCA, OMEGA, VOR, INS, Integrated systems 7.4 DECCA Decca is also a position-fixing hyperbolic navigation system which uses continuous waves and phase measurements to determine hyperbolic lines-of
How to introduce LORD Sensing s newest inertial sensors into your application
 LORD TECHNICAL NOTE Migrating from the 3DM-GX4 to the 3DM-GX5 How to introduce LORD Sensing s newest inertial sensors into your application Introduction The 3DM-GX5 is the latest generation of the very
LORD TECHNICAL NOTE Migrating from the 3DM-GX4 to the 3DM-GX5 How to introduce LORD Sensing s newest inertial sensors into your application Introduction The 3DM-GX5 is the latest generation of the very
Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System)
") ISSC 2013, LYIT Letterkenny, June 20 21 Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System) Thomas O Kane and John V. Ringwood Department of Electronic Engineering National University
ISSC 2013, LYIT Letterkenny, June 20 21 Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System) Thomas O Kane and John V. Ringwood Department of Electronic Engineering National University
Real-Time Scanning Goniometric Radiometer for Rapid Characterization of Laser Diodes and VCSELs
 Real-Time Scanning Goniometric Radiometer for Rapid Characterization of Laser Diodes and VCSELs Jeffrey L. Guttman, John M. Fleischer, and Allen M. Cary Photon, Inc. 6860 Santa Teresa Blvd., San Jose,
Real-Time Scanning Goniometric Radiometer for Rapid Characterization of Laser Diodes and VCSELs Jeffrey L. Guttman, John M. Fleischer, and Allen M. Cary Photon, Inc. 6860 Santa Teresa Blvd., San Jose,
SmartSenseCom Introduces Next Generation Seismic Sensor Systems
 SmartSenseCom Introduces Next Generation Seismic Sensor Systems Summary: SmartSenseCom, Inc. (SSC) has introduced the next generation in seismic sensing technology. SSC s systems use a unique optical sensing
SmartSenseCom Introduces Next Generation Seismic Sensor Systems Summary: SmartSenseCom, Inc. (SSC) has introduced the next generation in seismic sensing technology. SSC s systems use a unique optical sensing
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GLOBAL POSITIONING SYSTEMS. Knowing where and when
 GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
Entry #287 SONORAN ULTRASONIC CAVE MAPPING PLATFORM PSOC DESIGN CONTEST entry #287. Page 1
 SONORAN ULTRASONIC CAVE MAPPING PLATFORM PSOC DESIGN CONTEST 2002 entry #287 Page 1 ABSTRACT Even though we associate someone who is "as blind as a bat" as a person with poor imaging capabilities, the
SONORAN ULTRASONIC CAVE MAPPING PLATFORM PSOC DESIGN CONTEST 2002 entry #287 Page 1 ABSTRACT Even though we associate someone who is "as blind as a bat" as a person with poor imaging capabilities, the
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
NovAtel SPAN and Waypoint. GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
Sensors for orientation and control of satellites and space probes
 Sensors for orientation and control of satellites and space probes Ing. Ondrej Závodský GOSPACE s.r.o. ESA Contract No. 4000117400/16NL/NDe Specialized lectures Content 1) How to determine the orientation
Sensors for orientation and control of satellites and space probes Ing. Ondrej Závodský GOSPACE s.r.o. ESA Contract No. 4000117400/16NL/NDe Specialized lectures Content 1) How to determine the orientation
electronics for computer engineering (Sensor) by KrisMT Computer Engineering, ICT, University of Phayao
 by KrisMT Computer Engineering, ICT, University of Phayao") 305222 electronics for computer engineering (Sensor) by KrisMT Computer Engineering, ICT, University of Phayao ห วข อ Sensor =? Each type of sensor Technology Interpolation Sensor =? is a device that measures
305222 electronics for computer engineering (Sensor) by KrisMT Computer Engineering, ICT, University of Phayao ห วข อ Sensor =? Each type of sensor Technology Interpolation Sensor =? is a device that measures
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
AGF-216. The Earth s Ionosphere & Radars on Svalbard
 AGF-216 The Earth s Ionosphere & Radars on Svalbard Katie Herlingshaw 07/02/2018 1 Overview Radar basics what, how, where, why? How do we use radars on Svalbard? What is EISCAT and what does it measure?
AGF-216 The Earth s Ionosphere & Radars on Svalbard Katie Herlingshaw 07/02/2018 1 Overview Radar basics what, how, where, why? How do we use radars on Svalbard? What is EISCAT and what does it measure?
High-Fidelity Modeling and Simulation of Ground Robots at ERDC Chris Goodin, Ph.D.
 High-Fidelity Modeling and Simulation of Ground Robots at ERDC Chris Goodin, Ph.D. Research Physicist U.S. Army Engineer Research and Development Center Geotechnical and Structures Laboratory 21 June 2016
High-Fidelity Modeling and Simulation of Ground Robots at ERDC Chris Goodin, Ph.D. Research Physicist U.S. Army Engineer Research and Development Center Geotechnical and Structures Laboratory 21 June 2016
Jam Lab Capabilities. Charles Dionne. Matthew Pilat. Jam Lab Manager
 Jam Lab Capabilities Charles Dionne Jam Lab Manager charles.e.dionne@baesystems.com Matthew Pilat Senior Systems Engineer matthew.pilat@baesystems.com 1 Infrared Countermeasure (IRCM) Jam Lab Capabilities
Jam Lab Capabilities Charles Dionne Jam Lab Manager charles.e.dionne@baesystems.com Matthew Pilat Senior Systems Engineer matthew.pilat@baesystems.com 1 Infrared Countermeasure (IRCM) Jam Lab Capabilities
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Electronics Design Laboratory Lecture #11. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Design and Implementation of Inertial Navigation System
 Design and Implementation of Inertial Navigation System Ms. Pooja M Asangi PG Student, Digital Communicatiom Department of Telecommunication CMRIT College Bangalore, India Mrs. Sujatha S Associate Professor
Design and Implementation of Inertial Navigation System Ms. Pooja M Asangi PG Student, Digital Communicatiom Department of Telecommunication CMRIT College Bangalore, India Mrs. Sujatha S Associate Professor
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,