Robotics using Lego Mindstorms EV3 (Intermediate)
|
|
|
- Horace Greene
- 5 years ago
- Views:
Transcription
 Facebook.")
1 Robotics using Lego Mindstorms EV3 (Intermediate)
2 Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have EV3-G software installed on the laptop? If you have a question at any time please raise your hand and we will help you 2




3 Robotics using EV3 Sensors Touch Ultrasonic Gyro Color Infrared 3






4 Robotics using EV3 Putting it all together Take an EV3 Brick Build a chassis with Lego Structural elements, motors and wheels Use EV3 software to program it to perform the desired action and download the program to the brick Select the program and run it! 4

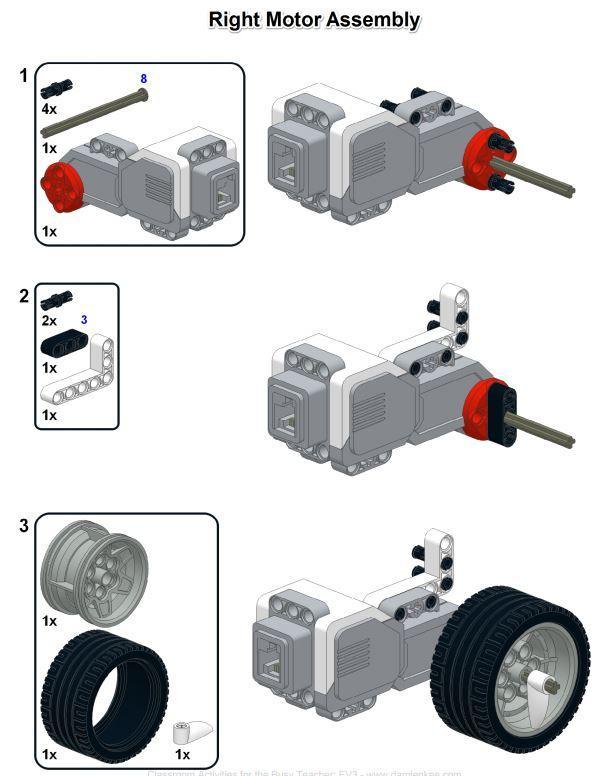
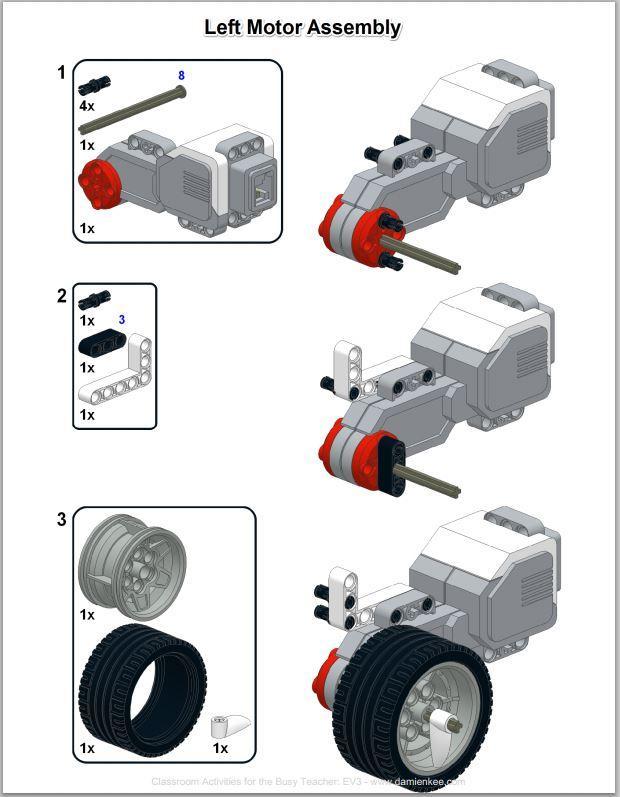
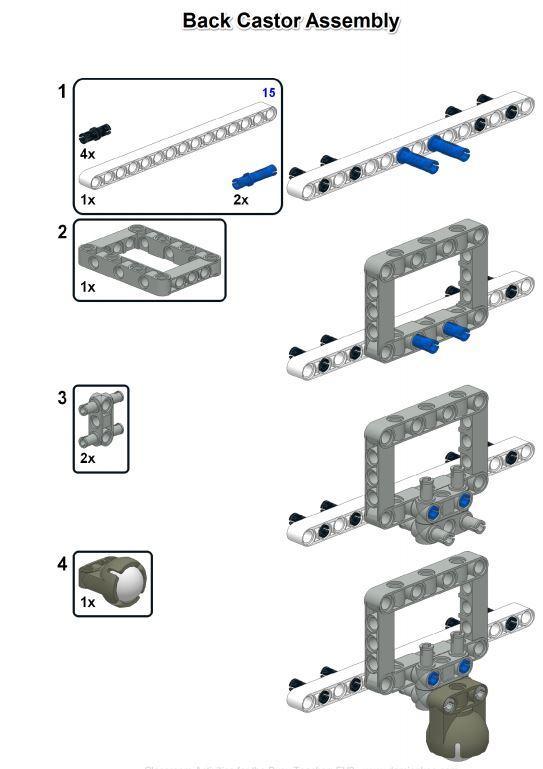
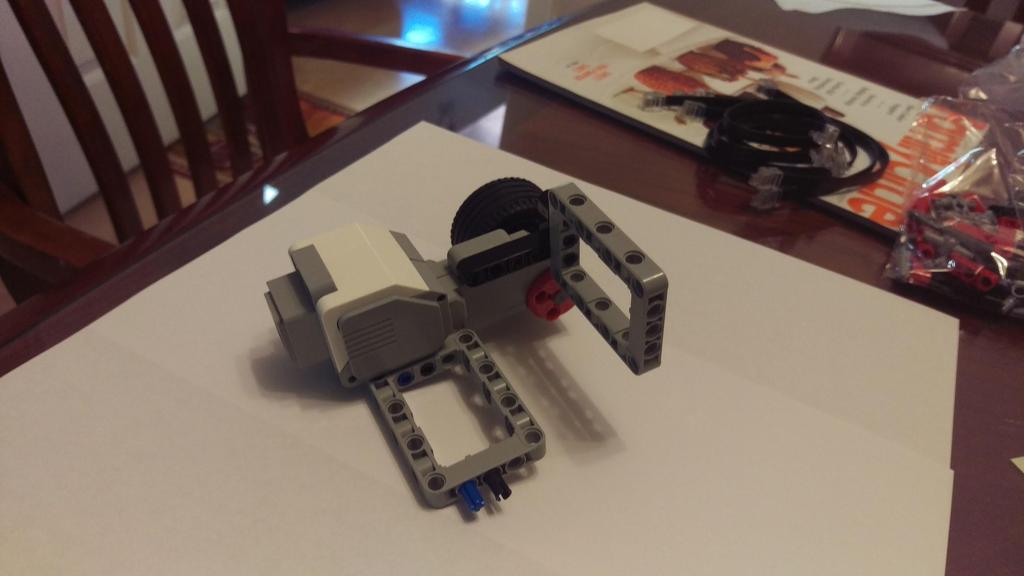
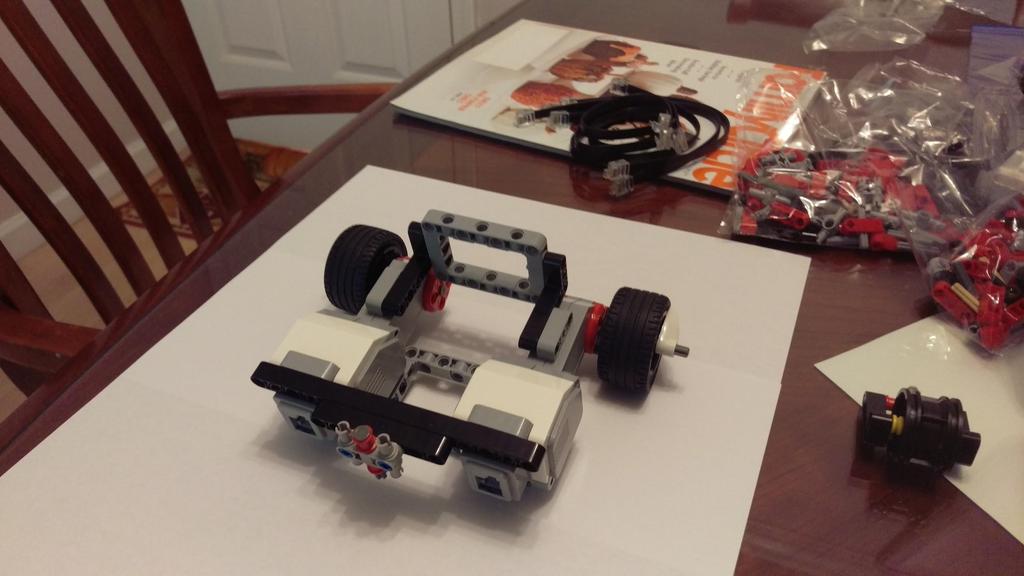
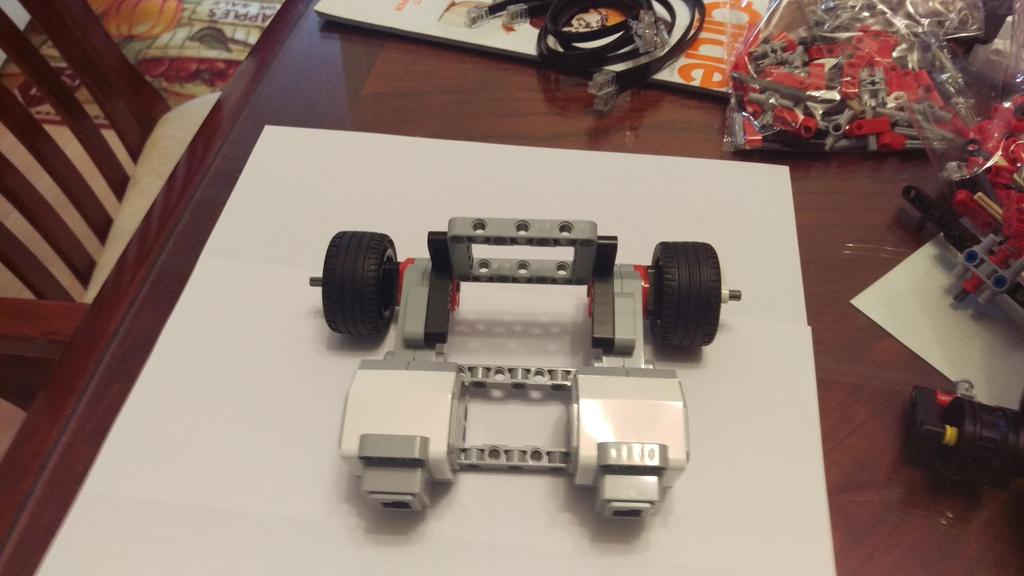
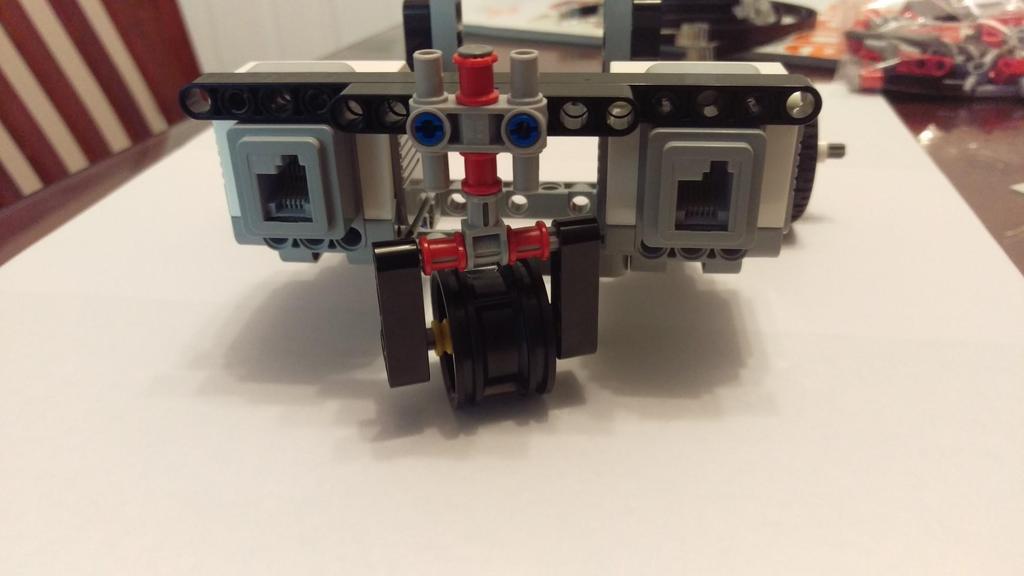
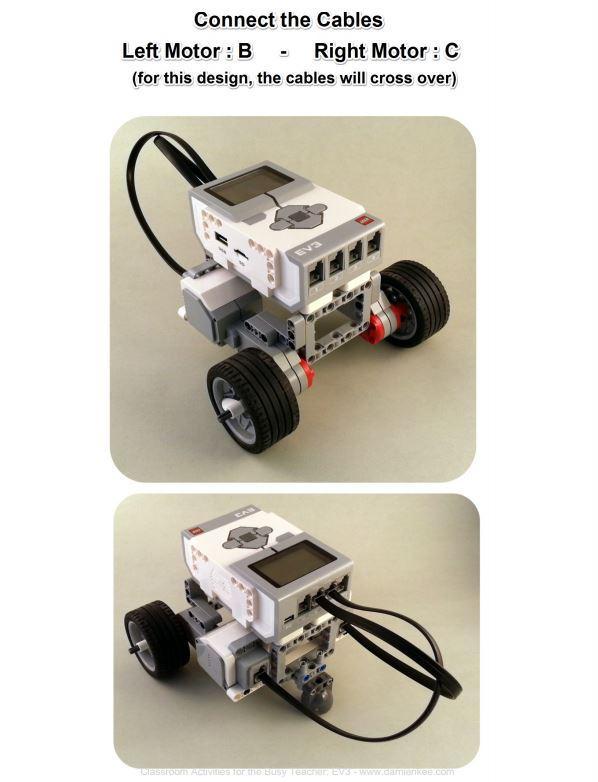
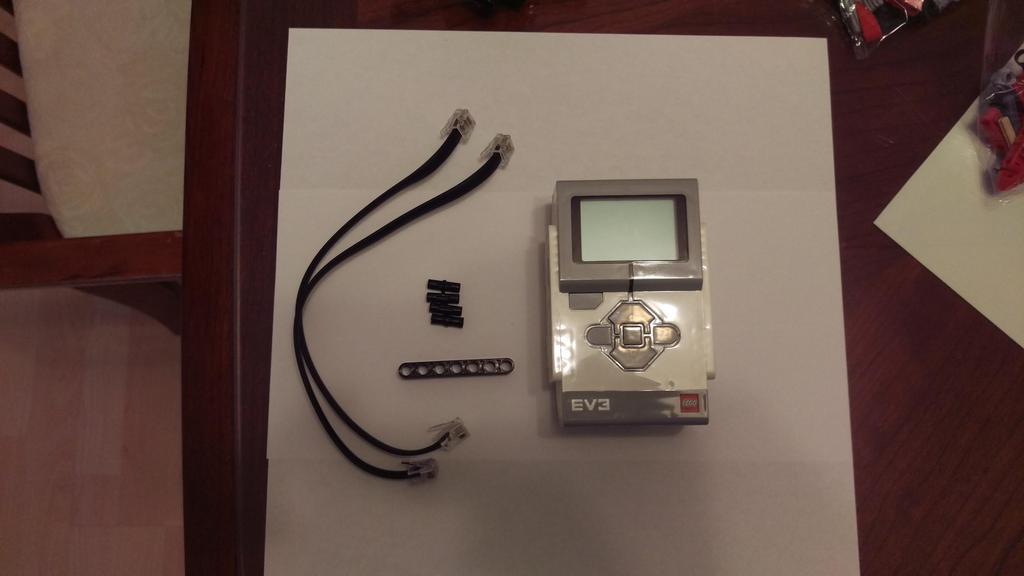
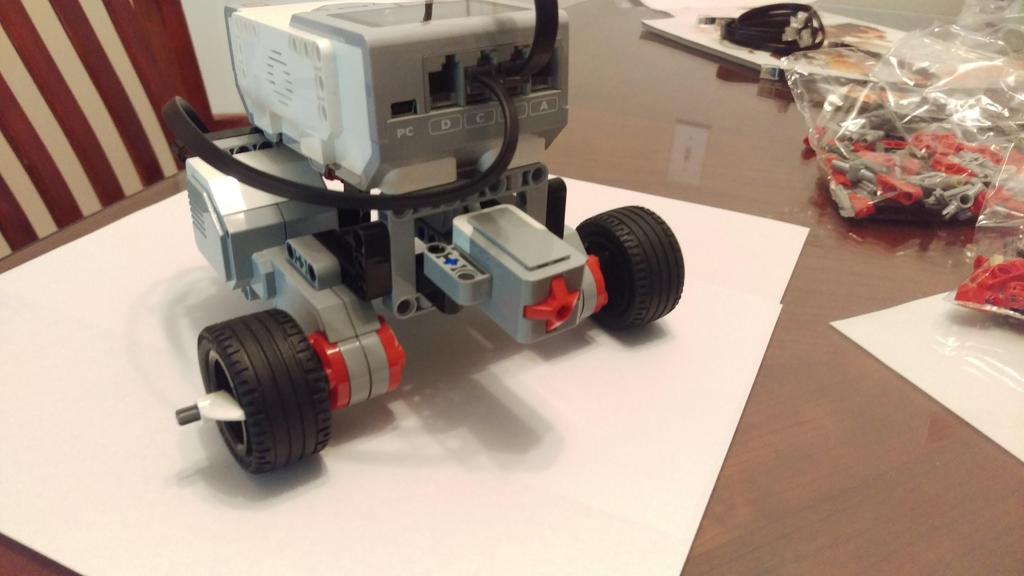
5 Robotics using EV3 Building the EV3 Castor Bot 5
6 6
7 7
8 8
9 9


10 10



11 11



12 Adding the Touch Sensor 12
13 Robotics using EV3 EV3 programming concepts Touch Sensor Loop Control Ultrasonic Sensor Color Sensor/Line Following MyBlocks / Functions 13


14 Touch Sensor Touch Setting 0 = Released 1 = Pushed 2 = Bumped 14
")
15 Wait Until Touch Turn B+C motors ON Wait for touch sensor to be pressed (Touch sensor is on port 2) 15

16 Loop Control Use a loop to allow repeating a set of instructions based on different criteria listed below Loop Until 16
17 Touch Sensor Challenge Program the robot to move forward continuously at 40% power. If the touch sensor is pressed the first time, the robot should turn 180 degrees and move in the opposite direction continuously. If the touch sensor is pressed again, the robot should once again turn and move forward continuously. This process of moving then turning should repeat 5 times; after 5 cycles, the robot should stop completely. 17



18 Ultrasonic Sensor Range in cm Set Comparator Selected for Proximity 18


19 Don t Touch the Walls! Challenge Program the robot to move forward continuously at 40% power. Every time it hits an obstacle as indicated by an ultrasonic sensor, the robot should move back one rotation, turn at about 120 degrees and continue. Robot should stop after 10 repetitions. 19

20 Adding the Color Sensor Attach the color sensor accessory and plug it into port 3 20
21 Line Following Humans want to follow the line in the middle. Let s have the robot do the same thing using the Color Sensor 21


22 Line Following 1. If we are on black, keep going straight 2. If we are on white, turn left to get back to the line When the robot leaves the left side of the line, the program no longer works! 22
23 Line Following Why can t the robot follow the line the same way humans do? They can see ahead. They can see the whole line and its surroundings They see both sides and which side they left Can t tell right or left side of the line Instead of the middle, could the robot follow the edge? So now the robot will fall off only the same side. 23


24 Line Following Left Edge If on black, turn left. If on white turn right. The robot has to choose which way to turn when the color sensor sees a different color. The answer depends on what side of the line you are following! Right Edge If on black, turn right. If on white turn left. 24

25 Line Following 25

26 MyBlocks 1. Create a program. It can be any sequence of blocks. 2. Highlight the blocks by holding the SHIFT key and clicking each block. 26

27 MyBlocks 3. Select the Tools menu, and click on My Block Builder. 27

28 MyBlocks 4. Name and choose an icon for your block. 28

29 Create Your Own MyBlock Create a MyBlock for your Line Following program from the last challenge! 29
30 Open Challenges Use the brick buttons to make a remote control for your robot: the left-arrow turns left, and the right-arrow turns right. The robot moves continuously forward, only pausing to turn when the buttons are pressed. Optional: If the up-arrow is pressed, move forward 3 rotations. If the down-arrow is pressed, move backward 3 rotations. Use the touch sensor to give your robot emotions! If the touch sensor is pressed, have the EV3 brick screen display a Big smile. If the touch sensor is not pressed, have the screen display a Sad face. Optional: Display additional expressions when the brick buttons are pressed. Use The Force to move your robot! If it is closer than 20cm from your hand, move backward, otherwise move forward. 30

31 Robotics using EV3 Thanks for coming! Visit our website to sign up for more classes this summer! Web resources: Legomindstorms.com EV3lessons.com 31
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
An Introduction to Programming using the NXT Robot:
 An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
BEGINNER PROGRAMMING LESSON
 Basic Line Follower (NXT) By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using the NXT
Basic Line Follower (NXT) By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using the NXT
FLL Programming Workshop Series
 FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School
 Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
EV3 Advanced Topics for FLL
 EV3 Advanced Topics for FLL Jim Keller GRASP Laboratory University of Pennsylvania August 14, 2016 Part 1 of 2 Topics Intro to Line Following Basic concepts Calibrate Calibrate the light sensor Display
EV3 Advanced Topics for FLL Jim Keller GRASP Laboratory University of Pennsylvania August 14, 2016 Part 1 of 2 Topics Intro to Line Following Basic concepts Calibrate Calibrate the light sensor Display
Robot Programming Manual
 2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
Lab book. Exploring Robotics (CORC3303)
") Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
How Do You Make a Program Wait?
 How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Introduction to Robotics Rubrics
 Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
EQ-ROBO Programming : bomb Remover Robot
 EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS
 Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Ev3 Robotics Programming 101
 Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Agent-based/Robotics Programming Lab II
 cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
BEGINNER PROGRAMMING LESSON
 Basic Line Follower By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Color Mode on
Basic Line Follower By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Color Mode on
LEGO Mindstorms Class: Lesson 1
 LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
TABLET LESSONS BASIC LINE FOLLOWER. By Sanjay and Arvind Seshan
 TABLET LESSONS BASIC LINE FOLLOWER By Sanjay and Arvind Seshan Lesson Objectives 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Colour Mode on the EV3 Colour
TABLET LESSONS BASIC LINE FOLLOWER By Sanjay and Arvind Seshan Lesson Objectives 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Colour Mode on the EV3 Colour
Chapter 14. using data wires
 Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
Where C= circumference, π = 3.14, and D = diameter EV3 Distance. Developed by Joanna M. Skluzacek Wisconsin 4-H 2016 Page 1
 Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
2.4 Sensorized robots
 66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
Robotics 2a. What Have We Got to Work With?
 Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Automatic Headlights
 Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2017 https://www.hamiltonbuhl.com/teacher-resources
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2017 https://www.hamiltonbuhl.com/teacher-resources
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2018 courses.techcamp.org.uk/ Page 1 of 7
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2018 courses.techcamp.org.uk/ Page 1 of 7
e d u c a t i o n Detect Dark Line Objectives Connect Teacher s Notes
 e d u c a t i o n Objectives Learn how to make the robot interact with the environment: Detect a line drawn on the floor by means of its luminosity. Hint You will need a flashlight or other light source
e d u c a t i o n Objectives Learn how to make the robot interact with the environment: Detect a line drawn on the floor by means of its luminosity. Hint You will need a flashlight or other light source
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Robotic Programming. Skills Checklist
 Robotic Programming Skills Checklist Name: Motors Motors Direction Steering Power Duration Complete B & C Forward Straight 75 3 Rotations B & C Forward Straight 100 5 Rotatins B & C Forward Straight 50
Robotic Programming Skills Checklist Name: Motors Motors Direction Steering Power Duration Complete B & C Forward Straight 75 3 Rotations B & C Forward Straight 100 5 Rotatins B & C Forward Straight 50
RoboCup Sumo Workshop. Margaux Edwards July 2018
 RoboCup Sumo Workshop Margaux Edwards July 2018 Plan for today: The Challenge Designing your Robot Programming your Robot Ultrasonic Sensor Light/Colour Sensor Competition Time! The Challenge: What is
RoboCup Sumo Workshop Margaux Edwards July 2018 Plan for today: The Challenge Designing your Robot Programming your Robot Ultrasonic Sensor Light/Colour Sensor Competition Time! The Challenge: What is
Line-Follower Challenge
 Line-Follower Challenge Pre-Activity Quiz 1. How does a color sensor work? Does the color sensor detect white or black as a higher amount of light reflectivity? Absorbance? 2. Can you think of a method
Line-Follower Challenge Pre-Activity Quiz 1. How does a color sensor work? Does the color sensor detect white or black as a higher amount of light reflectivity? Absorbance? 2. Can you think of a method
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here:
 Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Lego Nxt in Physical Etoys
 Lego Nxt in Physical Etoys Physical Etoys is a software Project which let us control, in real time, Lego Mindstorms Nxt s Robots using a Bluetooth connection. SqueakNxt is a module of the Physical Etoys
Lego Nxt in Physical Etoys Physical Etoys is a software Project which let us control, in real time, Lego Mindstorms Nxt s Robots using a Bluetooth connection. SqueakNxt is a module of the Physical Etoys
Studuino Icon Programming Environment Guide
 Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
: Robots for Education and Entertainment. Sara Schütz
 8.12.2008: Robots for Education and Entertainment Sara Schütz Table of Contents What means Robot for Education&Entertainment? Educational Robots: The Telebots Project -Introduction -How it works Entertainment
8.12.2008: Robots for Education and Entertainment Sara Schütz Table of Contents What means Robot for Education&Entertainment? Educational Robots: The Telebots Project -Introduction -How it works Entertainment
Parts of a Lego RCX Robot
 Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
INTERMEDIATE PROGRAMMING LESSON
 INTERMEDIATE PROGRAMMING LESSON Turn_Degrees My Block By: Droids Robotics LESSON OBJECTIVES 1. Create a useful My Block 2. Learn to make a My Block that will take inputs based on measurements with a protractor
INTERMEDIATE PROGRAMMING LESSON Turn_Degrees My Block By: Droids Robotics LESSON OBJECTIVES 1. Create a useful My Block 2. Learn to make a My Block that will take inputs based on measurements with a protractor
Let There Be Light. Opening Files. Deleting National Technology and Science Press
 Let There Be Light 2 Better to light a candle than to curse the darkness. Chinese Proverb The Hello World program demonstrates only the output aspect of a computer program. Now let s write a program that
Let There Be Light 2 Better to light a candle than to curse the darkness. Chinese Proverb The Hello World program demonstrates only the output aspect of a computer program. Now let s write a program that
1-11. Mini Sumo Bot. Building Instructions. Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts. Building: Program:
 Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts Mini Sumo Bot Building: Program: Building Instructions 1-11 Start by building the Castor Bot. Click the picture for building instructions.
Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts Mini Sumo Bot Building: Program: Building Instructions 1-11 Start by building the Castor Bot. Click the picture for building instructions.
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! Step 1 2017 courses.techcamp.org.uk/ Page
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! Step 1 2017 courses.techcamp.org.uk/ Page
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Instructors. Manual GEARED. After-School Robotics Program By Haley Hanson
 Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Image 1, Ref - see slide WHAT IS A ROBOT? A look at characteristics of robots using the LEGO EV3 as a specific example (50 minutes)
") 1 Image 1, Ref - see slide 17-18 WHAT IS A ROBOT? A look at characteristics of robots using the LEGO EV3 as a specific example (50 minutes) PRE/POST-ASSESSMENT SHEET - What is a robot? 1. Describe in one
1 Image 1, Ref - see slide 17-18 WHAT IS A ROBOT? A look at characteristics of robots using the LEGO EV3 as a specific example (50 minutes) PRE/POST-ASSESSMENT SHEET - What is a robot? 1. Describe in one
Curriculum Activities for Driving Course Curriculum Sample 1
 Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Instructional Technology Center
 Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
Welcome to Lego Rovers
 Welcome to Lego Rovers Aim: To control a Lego robot! How?: Both by hand and using a computer program. In doing so you will explore issues in the programming of planetary rovers and understand how roboticists
Welcome to Lego Rovers Aim: To control a Lego robot! How?: Both by hand and using a computer program. In doing so you will explore issues in the programming of planetary rovers and understand how roboticists
FIRST LEGO LEAGUE. PowerUp Summer Game. Presented by FRC 6328
 FIRST LEGO LEAGUE PowerUp Summer Game 2018 Presented by FRC 6328 FLL POWER UP OVERVIEW The purpose of the FLL PowerUP game is to provide an engaging summer program for FLL students that will help prepare
FIRST LEGO LEAGUE PowerUp Summer Game 2018 Presented by FRC 6328 FLL POWER UP OVERVIEW The purpose of the FLL PowerUP game is to provide an engaging summer program for FLL students that will help prepare
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Squaring or Aligning on a Line
 ADVANCED EV3 PROGRAMMING LESSON Squaring or Aligning on a Line By Droids Robotics Lesson Objectives Learn how to get your robot to square up (straighten out) when it comes to a line Learn how squaring
ADVANCED EV3 PROGRAMMING LESSON Squaring or Aligning on a Line By Droids Robotics Lesson Objectives Learn how to get your robot to square up (straighten out) when it comes to a line Learn how squaring
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Robots in Town Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Objectives.
 Overview Challenge Students will design, program, and build a robot that drives around in town while avoiding collisions and staying on the roads. The robot should turn around when it reaches the outside
Overview Challenge Students will design, program, and build a robot that drives around in town while avoiding collisions and staying on the roads. The robot should turn around when it reaches the outside
Chassis & Attachments 101. Chassis Overview
 Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Squaring or Aligning on a Line
 ADVANCED EV3 PROGRAMMING LESSON Squaring or Aligning on a Line By Sanjay and Arvind Seshan Lesson Objectives Learn how to get your robot to square up (straighten out) when it comes to a line Learn how
ADVANCED EV3 PROGRAMMING LESSON Squaring or Aligning on a Line By Sanjay and Arvind Seshan Lesson Objectives Learn how to get your robot to square up (straighten out) when it comes to a line Learn how
PHYSICS 220 LAB #1: ONE-DIMENSIONAL MOTION
 /53 pts Name: Partners: PHYSICS 22 LAB #1: ONE-DIMENSIONAL MOTION OBJECTIVES 1. To learn about three complementary ways to describe motion in one dimension words, graphs, and vector diagrams. 2. To acquire
/53 pts Name: Partners: PHYSICS 22 LAB #1: ONE-DIMENSIONAL MOTION OBJECTIVES 1. To learn about three complementary ways to describe motion in one dimension words, graphs, and vector diagrams. 2. To acquire
4-H Mindstorm EV3 Robotics Camp Mills County 4 Day Camp Day 1, Tuesday AGENDA
 4-H Mindstorm EV3 Robotics Camp Mills County 4 Day Camp Day 1, Tuesday 8:30-9:15 am Registration 9:15-10:30 a..m Belonging Getting to Know You Activities 1. Center Stage a. Name b. School and Grade c.
4-H Mindstorm EV3 Robotics Camp Mills County 4 Day Camp Day 1, Tuesday 8:30-9:15 am Registration 9:15-10:30 a..m Belonging Getting to Know You Activities 1. Center Stage a. Name b. School and Grade c.
Revision for Grade 7 in Unit #1&3
 Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
Flowcharts and Programs
 Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Multi-Agent Robotics with GPS Navigation
 Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Your EdVenture into Robotics 10 Lesson plans
 Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
RG Kit Guidebook ARGINEERING
 RG Kit Guidebook ARGINEERING RG Kit Guidebook ARGINEERING ARGINEERING The desire to interact, to connect exists in us all. As interactive beings, we interact not only with each other, but with the world
RG Kit Guidebook ARGINEERING RG Kit Guidebook ARGINEERING ARGINEERING The desire to interact, to connect exists in us all. As interactive beings, we interact not only with each other, but with the world
Thanks to Autocheck function, it is possible to perform a complete check-up of the robot thanks to a stepby-step
 2.3.23 Autocheck Thanks to Autocheck function, it is possible to perform a complete check-up of the robot thanks to a stepby-step procedure. In order to carry out the procedure, it is important to establish
2.3.23 Autocheck Thanks to Autocheck function, it is possible to perform a complete check-up of the robot thanks to a stepby-step procedure. In order to carry out the procedure, it is important to establish
Student Guide Speed challenge and robotics challenge mat
 Student Guide Speed challenge and robotics challenge mat Speed Challenge It s The Speed Challenge! We are really excited about this! It is all about speed. Get your LEGO MINDSTORMS Education EV3 moving
Student Guide Speed challenge and robotics challenge mat Speed Challenge It s The Speed Challenge! We are really excited about this! It is all about speed. Get your LEGO MINDSTORMS Education EV3 moving
Hare and Snail Challenges READY, GO!
 Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Basic NXT-G Programming
 Basic NXT-G Programming NXT-G Sequence Beams Blocks Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Loop 36 times 02 Simple Structure
Basic NXT-G Programming NXT-G Sequence Beams Blocks Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Loop 36 times 02 Simple Structure
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Chassis & Attachments 101. Part 1: Chassis Overview
 Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Morse Code Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Learning Focus.
 Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
LEGO BASED CHALLENGE. 1. Material
 LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
Hi everyone. educational environment based on team work that nurtures creativity and innovation preparing them for a world of increasing
 Hi everyone I would like to introduce myself and the Robotics program to all new and existing families. I teach Robotics to all of your children for an hour every fortnight. Robotics is a relatively new
Hi everyone I would like to introduce myself and the Robotics program to all new and existing families. I teach Robotics to all of your children for an hour every fortnight. Robotics is a relatively new
due Thursday 10/14 at 11pm (Part 1 appears in a separate document. Both parts have the same submission deadline.)
") CS2 Fall 200 Project 3 Part 2 due Thursday 0/4 at pm (Part appears in a separate document. Both parts have the same submission deadline.) You must work either on your own or with one partner. You may discuss
CS2 Fall 200 Project 3 Part 2 due Thursday 0/4 at pm (Part appears in a separate document. Both parts have the same submission deadline.) You must work either on your own or with one partner. You may discuss
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Team Description Paper
 Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer
 Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
1. ASSEMBLING THE PCB 2. FLASH THE ZIP LEDs 3. BUILDING THE WHEELS
 V1.0 :MOVE The Kitronik :MOVE mini for the BBC micro:bit provides an introduction to robotics. The :MOVE mini is a 2 wheeled robot, suitable for both remote control and autonomous operation. A range of
V1.0 :MOVE The Kitronik :MOVE mini for the BBC micro:bit provides an introduction to robotics. The :MOVE mini is a 2 wheeled robot, suitable for both remote control and autonomous operation. A range of
Basic NXT-G Programming
 Basic NXT-G Programming Sequence Beams Blocks NXT-G Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Forward 2, Back 2, Talk 02 Simple
Basic NXT-G Programming Sequence Beams Blocks NXT-G Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Forward 2, Back 2, Talk 02 Simple
The power of Math in LEGO Robotics
 The power of Math in LEGO Robotics Disseminator: Marco Diez marcodiez@dadeschools.net Howard D. McMillan Middle School (Mail Code: 6441) 13100 SW 59 ST. Miami, FL 33183 For information concerning Ideas
The power of Math in LEGO Robotics Disseminator: Marco Diez marcodiez@dadeschools.net Howard D. McMillan Middle School (Mail Code: 6441) 13100 SW 59 ST. Miami, FL 33183 For information concerning Ideas
Vision Ques t. Vision Quest. Use the Vision Sensor to drive your robot in Vision Quest!
 Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS
 HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
the Board of Education
 the Board of Education Voltage regulator electrical power (V dd, V in, V ss ) breadboard (for building circuits) power jack digital input / output pins 0 to 15 reset button Three-position switch 0 = OFF
the Board of Education Voltage regulator electrical power (V dd, V in, V ss ) breadboard (for building circuits) power jack digital input / output pins 0 to 15 reset button Three-position switch 0 = OFF
A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors
 Activity 1 - Reading Sensors A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors Computer Science Unit This tutorial teaches how to read values from sensors in the mblock IDE.
Activity 1 - Reading Sensors A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors Computer Science Unit This tutorial teaches how to read values from sensors in the mblock IDE.
 Learning Activity Series Control Systems www.nano-cemms.illinois.edu Copyright 2012 Board of Trustees, University of Illinois. All rights reserved. Control Systems Description: In Part 1, the instructor
Learning Activity Series Control Systems www.nano-cemms.illinois.edu Copyright 2012 Board of Trustees, University of Illinois. All rights reserved. Control Systems Description: In Part 1, the instructor
CURIE Academy, Summer 2014 Lab 2: Computer Engineering Software Perspective Sign-Off Sheet
 Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
6.081, Fall Semester, 2006 Assignment for Week 6 1
 6.081, Fall Semester, 2006 Assignment for Week 6 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Fall Semester, 2006 Assignment
6.081, Fall Semester, 2006 Assignment for Week 6 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Fall Semester, 2006 Assignment
Capstone Python Project Features
 Capstone Python Project Features CSSE 120, Introduction to Software Development General instructions: The following assumes a 3-person team. If you are a 2-person team, see your instructor for how to deal
Capstone Python Project Features CSSE 120, Introduction to Software Development General instructions: The following assumes a 3-person team. If you are a 2-person team, see your instructor for how to deal
contents in detail PART I GETTING STARTED acknowledgments...xvii
 contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
COMPETITION RULES. Last Revised: January 11 th, Table of Contents
 COMPETITION RULES Last Revised: January 11 th, 2015 Table of Contents 1.0 THE COMPETITION... 2 2.0 PARTICIPATION RULES... 3 2.1 Team Registration... 3 2.2 The Challenges... 4 2.3 The Technical Component...
COMPETITION RULES Last Revised: January 11 th, 2015 Table of Contents 1.0 THE COMPETITION... 2 2.0 PARTICIPATION RULES... 3 2.1 Team Registration... 3 2.2 The Challenges... 4 2.3 The Technical Component...