Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
|
|
|
- Adele Black
- 6 years ago
- Views:
Transcription
1 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass
2 Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise responds to it Digital and physical responses
3 Why Use Sensors? Feedback for positioning robot parts Calibration encoders for position / speed limit switches Motion control drive chain encoders gyroscope accelerometer Detecting field elements in/out of robot mechanical limit switch proximity sensor line following vision
4 Implementation Mounting Protected sensor must see target must be secure, sensor must not move with respect to what it is mounted to must be able to easily remove / replace sensor wires to sensor should be a connector, not soldered Noise Motors magnetic field can interfere with delicate sensors High current wires can interfere with sensors, or signal from sensor to roborio. If a sensor seems inconsistent, try moving it. Faraday cages help with electric field noise, but not with magnetic field noise
5 Implementation Interface types boolean (DIO) easy to interpret / use Analog more information possible noise, not precise Digital serial Precise high resolution more complex to utilize
6 Choosing a Sensor Indicator lights power light sensor output light Boolean analog and serial may have some other light, or none at all Operating range distance of detection optical conditions maximum speed (encoders) electrical characteristics: 5v preferred, 12v if necessary (custom circuit) Accuracy / precision Dependent on application


7 Examples of Sensors Limit switch Boolean potential for mechanical failure can detect field elements cheap Hall effect boolean or analog detects magnetic fields replaces limit switch for many applications cheap - medium price


8 Examples of Sensors cont. Encoder boolean outputs, but more complex information rotational position / rate feedback loops medium - expensive cal%20encoder&pagesize=25&showresults=true Potentiometer Analog rotational position cheap


9 Examples of Sensors cont. Gyroscope Serial angular motion control medium Accelerometer Serial translational motion control included in RoboRIO Not accurate, don t use Proximity & beam break boolean / analog / serial detects distance to object optical, use with field elements cheap to medium

10 The RoboRIO Pin spacing:.1 User manual:
11 CAN Controller Area Network Electronic Control Units (nodes), connected by a bus (network) Each node requires a: CPU (central processing unit)/microprocessor Decides what the received messages mean and what messages it wants to transmit. CAN controller - part of the microcontroller Will wait and store a message until it is fully delivered Will wait until the bus is free before sending a message Transceiver Receiving: Converts data from CANbus level (voltage) to levels that the CAN controller uses. Transmitting: Converts data from the CAN controller to (higher) CANbus levels. Web interface makes setting up different nodes easy
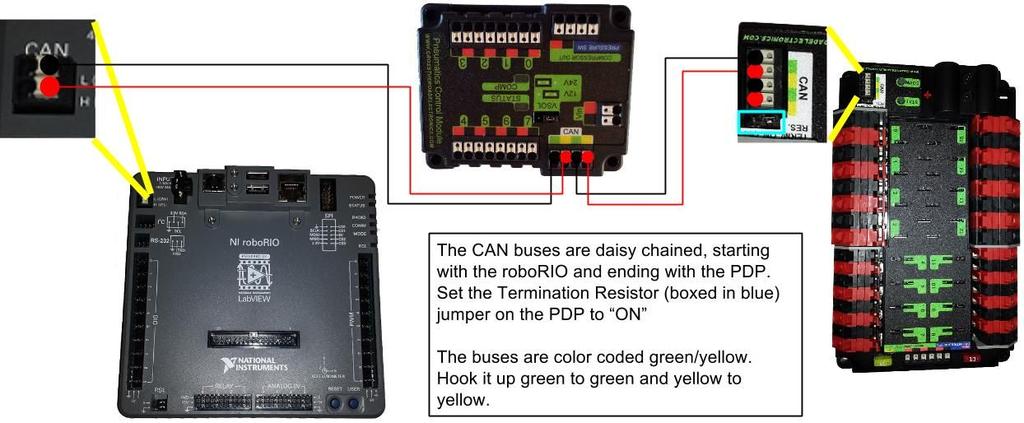
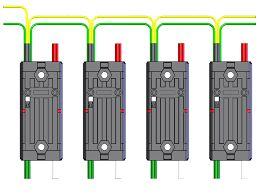
12 CAN cont.
 Device addresses to communicate, 7 bits for an address and the 8th for r/w.")
13 I2C I2C is a simple protocol to talk to sensors That said, using I2C with sensors may require some tricky programming One master, three slaves (3.3Vcc) Device addresses to communicate, 7 bits for an address and the 8th for r/w. Serial Clock Line (labeled SCL on the RoboRIO), Serial Data Line (labeled SDA) LCD/LED drivers EEPROMs (nonvolatile electrically erasable programmable read-only memory) capacitive sensors (can measure non-air conductivity) real-time clocks digital temperature ICs IR Range Finders
14 RS-232 (Serial) Three pins on the RoboRIO GND RxD (Data receiving) TxD (Data transmitting) Normally there are more pins, but RTS (request to send) and CTS (clear to send) is not necessary because the sensor will be constantly receiving and transmitting information. Not used in everyday computing: low transmission speed, large voltage swing (the signal swings between +12V for HIGH and -12V for low; within +-3V is unused to reduce noise)
 The sensor outputs a 1 (3.")
15 DIO Three Pins Ground Voltage (5V) This gives the sensor power Signal (boolean) The sensor outputs a 1 (3.3V/5V) or a 0 (0V) for the RoboRIO to detect
 Three pins Voltage (6V) - will work with many 5V devices Ground Signal (boolean) - 5V/0V The RoboRIO (and most computers) use PWM to approximate an analog out")
16 PWM Pulse Width Modulation Cycles of full and ground voltage; the programmers can control the width of the pulse (high time) Usually mirrors a percentage in actuators (motor voltage%, servo motor degrees out of 360) Three pins Voltage (6V) - will work with many 5V devices Ground Signal (boolean) - 5V/0V The RoboRIO (and most computers) use PWM to approximate an analog out signal.
 and the clock, the slave and master output 8 (or 12 or")

17 SPI - Serial Peripheral Interface (Bus) Another master-slave control example; however, in this case, once the master has initiated the selection of the slave (SS or CS-chip select) and the clock, the slave and master output 8 (or 12 or 16) bit words to each other in a loop. Only the slave that has been selected with CS(#) will respond with this loop. 5V and 3.3V sources SCLK: Set Clock, used for timing signals MOSI: Master Output, Slave Input MISO: Master Input Slave Output

18 Relay 5V controllable outputs on both FWD and REV pins. Ground pin on GND. Useful for certain devices: Spike H-Bridge Relay from VEX Robotics, for motor control (forward and reverse)
 Has an analog input which is multiplexed and interpreted by the RoboRIO. Also has an analog output which involves a digital to analog converter.")
19 MXP (myrio Expansion Port) Multi-purpose extension for DIO,I2C, PWM and UART.RX (receiving) and UART.TX (transmitting) Has an analog input which is multiplexed and interpreted by the RoboRIO. Also has an analog output which involves a digital to analog converter. Ready made expansion board:



20 RSL, Ethernet, USB device and host, and power USB device port USB host ports
21 Citrus Circuits Fall Workshop Series Thank You!

22 How Encoders Work Optical Encoder Rotary Encoder voltage white black white black white time
 + angular velocity * 20 ms Note: it is still wise to measure the time between readings,")
23 What a Gyroscope Measures Gyroscopes measure angular velocity, not angular position. It tells you how fast you are turning, not the direction you are facing. Luckily, in FIRST, measurements are picked up in 20ms increments, so: Angular position = (Old angular position) + angular velocity * 20 ms Note: it is still wise to measure the time between readings, in case that 20ms interval changes for some reason.
Application Note Using MagAlpha Devices to Replace Optical Encoders
 Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Activity 4: Due before the lab during the week of Feb
 Today's Plan Announcements: Lecture Test 2 programming in C Activity 4 Serial interfaces Analog output Driving external loads Motors: dc motors, stepper motors, servos Lecture Test Activity 4: Due before
Today's Plan Announcements: Lecture Test 2 programming in C Activity 4 Serial interfaces Analog output Driving external loads Motors: dc motors, stepper motors, servos Lecture Test Activity 4: Due before
3.3V regulator. JA H-bridge. Doc: page 1 of 7
 Cerebot Reference Manual Revision: February 9, 2009 Note: This document applies to REV B-E of the board. www.digilentinc.com 215 E Main Suite D Pullman, WA 99163 (509) 334 6306 Voice and Fax Overview The
Cerebot Reference Manual Revision: February 9, 2009 Note: This document applies to REV B-E of the board. www.digilentinc.com 215 E Main Suite D Pullman, WA 99163 (509) 334 6306 Voice and Fax Overview The
I 2 C RedBot & DC Motor Servo Motor Control
 ECE3411 Fall 2016 Lecture 6c. I 2 C RedBot & DC Motor Servo Motor Control Marten van Dijk Department of Electrical & Computer Engineering University of Connecticut Email: marten.van_dijk@uconn.edu Slides
ECE3411 Fall 2016 Lecture 6c. I 2 C RedBot & DC Motor Servo Motor Control Marten van Dijk Department of Electrical & Computer Engineering University of Connecticut Email: marten.van_dijk@uconn.edu Slides
Interfacing Sensors & Modules to Microcontrollers
 Interfacing Sensors & Modules to Microcontrollers Presentation Topics I. Microprocessors & Microcontroller II. III. Hardware/software Tools for Interfacing Type of Sensors/Modules IV. Level Inputs (Digital
Interfacing Sensors & Modules to Microcontrollers Presentation Topics I. Microprocessors & Microcontroller II. III. Hardware/software Tools for Interfacing Type of Sensors/Modules IV. Level Inputs (Digital
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Introduction to the Arduino Kit
 1 Introduction to the Arduino Kit Introduction Arduino is an open source microcontroller platform used for sensing both digital and analog input signals and for sending digital and analog output signals
1 Introduction to the Arduino Kit Introduction Arduino is an open source microcontroller platform used for sensing both digital and analog input signals and for sending digital and analog output signals
ZKit-51-RD2, 8051 Development Kit
 ZKit-51-RD2, 8051 Development Kit User Manual 1.1, June 2011 This work is licensed under the Creative Commons Attribution-Share Alike 2.5 India License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.5/in/
ZKit-51-RD2, 8051 Development Kit User Manual 1.1, June 2011 This work is licensed under the Creative Commons Attribution-Share Alike 2.5 India License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.5/in/
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
FIRST Robotics Control System
 2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
DS1803 Addressable Dual Digital Potentiometer
 www.dalsemi.com FEATURES 3V or 5V Power Supplies Ultra-low power consumption Two digitally controlled, 256-position potentiometers 14-Pin TSSOP (173 mil) and 16-Pin SOIC (150 mil) packaging available for
www.dalsemi.com FEATURES 3V or 5V Power Supplies Ultra-low power consumption Two digitally controlled, 256-position potentiometers 14-Pin TSSOP (173 mil) and 16-Pin SOIC (150 mil) packaging available for
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
2F. No.25, Industry E. 9 th Rd., Science-Based Industrial Park, Hsinchu, Taiwan Application Note of OGM220, AN001 V1.8
 Application Note of OGM220, AN001 V1.8 1.0 Introduction OGM220 series is a dual channels NDIR module having a digital output directly proportional to CO2 concentration. OGM220 is designed for multi-dropped
Application Note of OGM220, AN001 V1.8 1.0 Introduction OGM220 series is a dual channels NDIR module having a digital output directly proportional to CO2 concentration. OGM220 is designed for multi-dropped
A Wireless Mesh IoT sensor system FEATURES DESCRIPTION. Vicotee Njord series Nodes
 A Wireless Mesh IoT sensor system Vicotee Njord series Nodes FEATURES A SmartMesh IP network consists of a highly scalable self-forming multi-hop mesh of wireless nodes, known as motes, which collect and
A Wireless Mesh IoT sensor system Vicotee Njord series Nodes FEATURES A SmartMesh IP network consists of a highly scalable self-forming multi-hop mesh of wireless nodes, known as motes, which collect and
Project Name Here CSEE 4840 Project Design Document. Thomas Chau Ben Sack Peter Tsonev
 Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Servo click. PID: MIKROE 3133 Weight: 32 g
 Servo click PID: MIKROE 3133 Weight: 32 g Servo click is a 16-channel PWM servo driver with the voltage sensing circuitry. It can be used to simultaneously control 16 servo motors, each with its own programmable
Servo click PID: MIKROE 3133 Weight: 32 g Servo click is a 16-channel PWM servo driver with the voltage sensing circuitry. It can be used to simultaneously control 16 servo motors, each with its own programmable
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Hardware Platforms and Sensors
 Hardware Platforms and Sensors Tom Spink Including material adapted from Bjoern Franke and Michael O Boyle Hardware Platform A hardware platform describes the physical components that go to make up a particular
Hardware Platforms and Sensors Tom Spink Including material adapted from Bjoern Franke and Michael O Boyle Hardware Platform A hardware platform describes the physical components that go to make up a particular
The Datasheet and Interfacing EE3376
 The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
In this lecture, we will look at how different electronic modules communicate with each other. We will consider the following topics:
 In this lecture, we will look at how different electronic modules communicate with each other. We will consider the following topics: Links between Digital and Analogue Serial vs Parallel links Flow control
In this lecture, we will look at how different electronic modules communicate with each other. We will consider the following topics: Links between Digital and Analogue Serial vs Parallel links Flow control
Sensors Fundamentals. Renesas Electronics America Inc Renesas Electronics America Inc. All rights reserved.
 Sensors Fundamentals Renesas Electronics America Inc. Renesas Technology & Solution Portfolio 2 Agenda Introduction Sensors fundamentals ADI sensors Sensors data acquisition ADI support for sensors applications
Sensors Fundamentals Renesas Electronics America Inc. Renesas Technology & Solution Portfolio 2 Agenda Introduction Sensors fundamentals ADI sensors Sensors data acquisition ADI support for sensors applications
802.11g Wireless Sensor Network Modules
 RFMProducts are now Murata Products Small Size, Integral Antenna, Light Weight, Low Cost 7.5 µa Sleep Current Supports Battery Operation Timer and Event Triggered Auto-reporting Capability Analog, Digital,
RFMProducts are now Murata Products Small Size, Integral Antenna, Light Weight, Low Cost 7.5 µa Sleep Current Supports Battery Operation Timer and Event Triggered Auto-reporting Capability Analog, Digital,
DASL 120 Introduction to Microcontrollers
 DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
The PmodIA is an impedance analyzer built around the Analog Devices AD bit Impedance Converter Network Analyzer.
 1300 Henley Court Pullman, WA 99163 509.334.6306 www.digilentinc.com PmodIA Reference Manual Revised April 15, 2016 This manual applies to the PmodIA rev. A Overview The PmodIA is an impedance analyzer
1300 Henley Court Pullman, WA 99163 509.334.6306 www.digilentinc.com PmodIA Reference Manual Revised April 15, 2016 This manual applies to the PmodIA rev. A Overview The PmodIA is an impedance analyzer
X3M. Multi-Axis Absolute MEMS Inclinometer Page 1 of 13. Description. Software. Mechanical Drawing. Features
 Page 1 of 13 Description The X3M is no longer available for purchase. The X3M is an absolute inclinometer utilizing MEMS (micro electro-mechanical systems) technology to sense tilt angles over a full 360
Page 1 of 13 Description The X3M is no longer available for purchase. The X3M is an absolute inclinometer utilizing MEMS (micro electro-mechanical systems) technology to sense tilt angles over a full 360
Figure 1: Functional Block Diagram
 MagAlpha MA750 Key features 8 bit digital and 12 bit PWM output 500 khz refresh rate 7.5 ma supply current Serial interface for data readout and settings QFN16 3x3mm Package General Description The MagAlpha
MagAlpha MA750 Key features 8 bit digital and 12 bit PWM output 500 khz refresh rate 7.5 ma supply current Serial interface for data readout and settings QFN16 3x3mm Package General Description The MagAlpha
ZKit-ARM-1769, ARM Dev. Kit
 ZKitARM769, ARM Dev. Kit User Manual 0., May 03 ZKitARM769, ARM Dev. Kit User Manual Rev. 0. This work is licensed under the Creative Commons AttributionShare Alike.5 India License. To view a copy of this
ZKitARM769, ARM Dev. Kit User Manual 0., May 03 ZKitARM769, ARM Dev. Kit User Manual Rev. 0. This work is licensed under the Creative Commons AttributionShare Alike.5 India License. To view a copy of this
Welcome to Electrical Design and Wiring for Indiana F.I.R.S.T Teams
 Welcome to Electrical Design and Wiring for Indiana F.I.R.S.T Teams Presenters Chris Noble - Team 829 Mentor Cornerstone Controls Engineer Darrell Noble - Team 71 Mentor Bemcor Engineer Combined 28 years
Welcome to Electrical Design and Wiring for Indiana F.I.R.S.T Teams Presenters Chris Noble - Team 829 Mentor Cornerstone Controls Engineer Darrell Noble - Team 71 Mentor Bemcor Engineer Combined 28 years
RB-Dev-03 Devantech CMPS03 Magnetic Compass Module
 RB-Dev-03 Devantech CMPS03 Magnetic Compass Module This compass module has been specifically designed for use in robots as an aid to navigation. The aim was to produce a unique number to represent the
RB-Dev-03 Devantech CMPS03 Magnetic Compass Module This compass module has been specifically designed for use in robots as an aid to navigation. The aim was to produce a unique number to represent the
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
Ocean Controls KT-5221 Modbus IO Module
 Ocean Controls Modbus IO Module 8 Relay Outputs 4 Opto-Isolated Inputs 2 Analog Inputs (10 bit) 1 PWM Output (10 bit) 4 Input Counters Connections via Pluggable Screw Terminals 0-5V or 0-20mA Analog Inputs,
Ocean Controls Modbus IO Module 8 Relay Outputs 4 Opto-Isolated Inputs 2 Analog Inputs (10 bit) 1 PWM Output (10 bit) 4 Input Counters Connections via Pluggable Screw Terminals 0-5V or 0-20mA Analog Inputs,
AMS0805WAH. CATALOG No.: AMS0805WAH. Motion Sensor Data Sheet Ver Advanced Material on Technology
 CATALOG No.: 2007.11 AMS0805WAH Motion Sensor Data Sheet Ver. 1.1 Advanced Material on Technology Overview Motion sensor is a 6-axis module consisting of 3-axis magnetic sensor and 3-axis accelerometer.
CATALOG No.: 2007.11 AMS0805WAH Motion Sensor Data Sheet Ver. 1.1 Advanced Material on Technology Overview Motion sensor is a 6-axis module consisting of 3-axis magnetic sensor and 3-axis accelerometer.
Programming PIC Microchips
 Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
DNT24MCA DNT24MPA. Low Cost 2.4 GHz FHSS Transceiver Modules with I/O. DNT24MCA/MPA Absolute Maximum Ratings. DNT24MCA/MPA Electrical Characteristics
 - 2.4 GHz Frequency Hopping Spread Spectrum Transceivers - Direct Peer-to-peer Low Latency Communication - Transmitter RF Power Configurable - 10 or 63 mw - Built-in Chip Antenna - 250 kbps RF Data Rate
- 2.4 GHz Frequency Hopping Spread Spectrum Transceivers - Direct Peer-to-peer Low Latency Communication - Transmitter RF Power Configurable - 10 or 63 mw - Built-in Chip Antenna - 250 kbps RF Data Rate
DNT90MCA DNT90MPA. Low Cost 900 MHz FHSS Transceiver Modules with I/O
 - 900 MHz Frequency Hopping Spread Spectrum Transceivers - Direct Peer-to-peer Low Latency Communication - Transmitter Power Configurable to 40 or 158 mw - Built-in 0 dbi Chip Antenna - 100 kbps RF Data
- 900 MHz Frequency Hopping Spread Spectrum Transceivers - Direct Peer-to-peer Low Latency Communication - Transmitter Power Configurable to 40 or 158 mw - Built-in 0 dbi Chip Antenna - 100 kbps RF Data
Trademarks & Copyright
 Smart Peripheral Controller Neo DC Motor 1.2A Trademarks & Copyright AT, IBM, and PC are trademarks of International Business Machines Corp. Pentium is a registered trademark of Intel Corporation. Windows
Smart Peripheral Controller Neo DC Motor 1.2A Trademarks & Copyright AT, IBM, and PC are trademarks of International Business Machines Corp. Pentium is a registered trademark of Intel Corporation. Windows
Tarocco Closed Loop Motor Controller
 Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Simple Servo USER Instructions
 Simple Servo USER Instructions Version 1V2 Copyright 2003-2007 Active Robots Limited 10A New Rock Ind. Est., Newrock, Chilcompton, Somerset BA3 4JE UK Tel: +44(0)1761 239 267 Fax: +44(0)176 123 3162 www.active-robots.com
Simple Servo USER Instructions Version 1V2 Copyright 2003-2007 Active Robots Limited 10A New Rock Ind. Est., Newrock, Chilcompton, Somerset BA3 4JE UK Tel: +44(0)1761 239 267 Fax: +44(0)176 123 3162 www.active-robots.com
DS1807 Addressable Dual Audio Taper Potentiometer
 Addressable Dual Audio Taper Potentiometer www.dalsemi.com FEATURES Operates from 3V or 5V Power Supplies Ultra-low power consumption Two digitally controlled, 65-position potentiometers Logarithmic resistor
Addressable Dual Audio Taper Potentiometer www.dalsemi.com FEATURES Operates from 3V or 5V Power Supplies Ultra-low power consumption Two digitally controlled, 65-position potentiometers Logarithmic resistor
SGD 43-A 4.3 PanelPilotACE Compatible Display
 is a 4.3 capacitive touch display designed for use with PanelPilotACE Design Studio, a free drag-and-drop style software package for rapid development of advanced user interfaces and panel meters. The
is a 4.3 capacitive touch display designed for use with PanelPilotACE Design Studio, a free drag-and-drop style software package for rapid development of advanced user interfaces and panel meters. The
Brushless 5 click. PID: MIKROE 3032 Weight: 25 g
 Brushless 5 click PID: MIKROE 3032 Weight: 25 g Brushless 5 click is a 3 phase sensorless BLDC motor controller, with a soft-switching feature for reduced motor noise and EMI, and precise BEMF motor sensing,
Brushless 5 click PID: MIKROE 3032 Weight: 25 g Brushless 5 click is a 3 phase sensorless BLDC motor controller, with a soft-switching feature for reduced motor noise and EMI, and precise BEMF motor sensing,
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Micromouse Meeting #3 Lecture #2. Power Motors Encoders
 Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
RS-232 Electrical Specifications and a Typical Connection
 Maxim > Design Support > Technical Documents > Tutorials > Interface Circuits > APP 723 Keywords: RS-232, rs232, RS-422, rs422, RS-485, rs485, RS-232 port powered, RS-232 to RS-485 conversion, daisy chain,
Maxim > Design Support > Technical Documents > Tutorials > Interface Circuits > APP 723 Keywords: RS-232, rs232, RS-422, rs422, RS-485, rs485, RS-232 port powered, RS-232 to RS-485 conversion, daisy chain,
Systems & Devices Part 1
 Systems & Devices Part 1 Alexander Nelson February 5th, 2018 University of Arkansas - Department of Computer Science and Computer Engineering What composes wearable, ubiquitous, or invisible systems? 0
Systems & Devices Part 1 Alexander Nelson February 5th, 2018 University of Arkansas - Department of Computer Science and Computer Engineering What composes wearable, ubiquitous, or invisible systems? 0
INF8574 GENERAL DESCRIPTION
 GENERAL DESCRIPTION The INF8574 is a silicon CMOS circuit. It provides general purpose remote I/O expansion for most microcontroller families via the two-line bidirectional bus (I 2 C). The device consists
GENERAL DESCRIPTION The INF8574 is a silicon CMOS circuit. It provides general purpose remote I/O expansion for most microcontroller families via the two-line bidirectional bus (I 2 C). The device consists
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Characteristic Sym Notes Minimum Typical Maximum Units Operating Frequency Range MHz. RF Chip Rate 11 Mcps RF Data Rates 1, 2, 5.
 RFM Products are now Murata products. Small Size, Light Weight, Low Cost 7.5 µa Sleep Current Supports Battery Operation Timer and Event Triggered Auto-reporting Capability Analog, Digital, Serial and
RFM Products are now Murata products. Small Size, Light Weight, Low Cost 7.5 µa Sleep Current Supports Battery Operation Timer and Event Triggered Auto-reporting Capability Analog, Digital, Serial and
Arduino Microcontroller Processing for Everyone!: Third Edition / Steven F. Barrett
 Arduino Microcontroller Processing for Everyone!: Third Edition / Steven F. Barrett Anatomy of a Program Programs written for a microcontroller have a fairly repeatable format. Slight variations exist
Arduino Microcontroller Processing for Everyone!: Third Edition / Steven F. Barrett Anatomy of a Program Programs written for a microcontroller have a fairly repeatable format. Slight variations exist
Specifications.
 is a 7 capacitive touch display designed for use with PanelPilotACE Design Studio, a free drag-and-drop style software package for rapid development of advanced user interfaces and panel meters. The is
is a 7 capacitive touch display designed for use with PanelPilotACE Design Studio, a free drag-and-drop style software package for rapid development of advanced user interfaces and panel meters. The is
Master Op-Doc/Test Plan
 Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
EEE3410 Microcontroller Applications Department of Electrical Engineering Lecture 11 Motor Control
 EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Wire S/C Term Pot Speed Control RED VREF VH 5V Pot Hookup YEL DC IN VW BLU GND VL GND
 Bit3 Bit2 Bit1 Bit0 Motor#2 Motor#1 SSR#4 SSR#3 SSR#2 SSR#1 Digital Pot#2 Digital Pot#1 Action Bits 0-3 Right Rev Right Fwd Left Rev Left Fwd Right Speed Left Speed Stop 0 0 0 0 0 don't care don't care
Bit3 Bit2 Bit1 Bit0 Motor#2 Motor#1 SSR#4 SSR#3 SSR#2 SSR#1 Digital Pot#2 Digital Pot#1 Action Bits 0-3 Right Rev Right Fwd Left Rev Left Fwd Right Speed Left Speed Stop 0 0 0 0 0 don't care don't care
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Integrated Servo Motor UCS57
 Integrated Servo Motor Introduction is a new generation of high performance digital integrated servo drive motor, which is a series of low voltage AC servo products integrated with AC servo motor and drive
Integrated Servo Motor Introduction is a new generation of high performance digital integrated servo drive motor, which is a series of low voltage AC servo products integrated with AC servo motor and drive
nrf24l01+ Transceiver Hookup Guide
 Page 1 of 6 nrf24l01+ Transceiver Hookup Guide Introduction These breakout boards provide SPI access to the nrf24l01+ transceiver module from Nordic Semiconductor. The transceiver operates at 2.4 GHz and
Page 1 of 6 nrf24l01+ Transceiver Hookup Guide Introduction These breakout boards provide SPI access to the nrf24l01+ transceiver module from Nordic Semiconductor. The transceiver operates at 2.4 GHz and
DNT2400. Low Cost 2.4 GHz FHSS Transceiver Module with I/O
 2.4 GHz Frequency Hopping Spread Spectrum Transceiver Point-to-point, Point-to-multipoint, Peer-to-peer and Tree-routing Networks Transmitter Power Configurable from 1 to 63 mw RF Data Rate Configurable
2.4 GHz Frequency Hopping Spread Spectrum Transceiver Point-to-point, Point-to-multipoint, Peer-to-peer and Tree-routing Networks Transmitter Power Configurable from 1 to 63 mw RF Data Rate Configurable
MDM5253 DC Motor Driver Module with Position and Current Feedback User Manual
 MDM5253 DC Motor Driver Module with Position and Current Feedback User Manual Version: 1.0.3 Apr. 2013 Table of Contents I. Introduction 2 II. Operations 2 II.1. Theory of Operation 2 II.2. Running as
MDM5253 DC Motor Driver Module with Position and Current Feedback User Manual Version: 1.0.3 Apr. 2013 Table of Contents I. Introduction 2 II. Operations 2 II.1. Theory of Operation 2 II.2. Running as
Meshreen MS5168 ZigBee Module MS5168-Mxx series USER MANUAL FCC ID :2AC2E-68M04
 Meshreen MS5168 ZigBee Module MS5168-Mxx series USER MANUAL FCC ID :2AC2E-68M04 Meshreen DS MS5168 / info@meshreen.com 1 Content 1. Introduction... 3 1.1 Variants... 3 2. Specification... 4 2.1 Pin configurations...
Meshreen MS5168 ZigBee Module MS5168-Mxx series USER MANUAL FCC ID :2AC2E-68M04 Meshreen DS MS5168 / info@meshreen.com 1 Content 1. Introduction... 3 1.1 Variants... 3 2. Specification... 4 2.1 Pin configurations...
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Figure 1: Functional Block Diagram
 MagAlpha MA120 Angular Sensor for 3-Phase Brushless Motor Key features U V W signals for block commutation Adjustable zero 500 khz refresh rate Ultra low latency: 3 µs Serial interface for settings 8.5
MagAlpha MA120 Angular Sensor for 3-Phase Brushless Motor Key features U V W signals for block commutation Adjustable zero 500 khz refresh rate Ultra low latency: 3 µs Serial interface for settings 8.5
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller
 A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
30-80V, 8.2A Peak, No Tuning, Nulls loss of Synchronization
 2-phase Hybrid Servo Drive 30-80V, 8.2A Peak, No Tuning, Nulls loss of Synchronization Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor
2-phase Hybrid Servo Drive 30-80V, 8.2A Peak, No Tuning, Nulls loss of Synchronization Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor
Design of double loop-locked system for brush-less DC motor based on DSP
 International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge
 Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Home Automation, Inc. Omnistat2. RC-1000 and RC-2000 Communicating Thermostat. Serial Protocol Description
 Home Automation, Inc. Omnistat2 RC-1000 and RC-2000 Communicating Thermostat Serial Protocol Description This document contains the intellectual property of Home Automation, Inc. (HAI). HAI authorizes
Home Automation, Inc. Omnistat2 RC-1000 and RC-2000 Communicating Thermostat Serial Protocol Description This document contains the intellectual property of Home Automation, Inc. (HAI). HAI authorizes
Serial Servo Controller
 Document : Datasheet Model # : ROB - 1185 Date : 16-Mar -07 Serial Servo Controller - USART/I 2 C with ADC Rhydo Technologies (P) Ltd. (An ISO 9001:2008 Certified R&D Company) Golden Plaza, Chitoor Road,
Document : Datasheet Model # : ROB - 1185 Date : 16-Mar -07 Serial Servo Controller - USART/I 2 C with ADC Rhydo Technologies (P) Ltd. (An ISO 9001:2008 Certified R&D Company) Golden Plaza, Chitoor Road,
ZKit-51-RD2, 8051 Development Kit
 ZKit-51-RD2, 8051 Development Kit User Manual 2.0, Oct 2013 This work is licensed under the Creative Commons Attribution-Share Alike 2.5 India License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.5/in/
ZKit-51-RD2, 8051 Development Kit User Manual 2.0, Oct 2013 This work is licensed under the Creative Commons Attribution-Share Alike 2.5 India License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.5/in/
ESE 350 HEXAWall v 2.0 Michelle Adjangba Omari Maxwell
 ESE 350 HEXAWall v 2.0 Michelle Adjangba Omari Maxwell Abstract This project is a continuation from the HEXA interactive wall display done in ESE 350 last spring. Professor Mangharam wants us to take this
ESE 350 HEXAWall v 2.0 Michelle Adjangba Omari Maxwell Abstract This project is a continuation from the HEXA interactive wall display done in ESE 350 last spring. Professor Mangharam wants us to take this
DNT900. Low Cost 900 MHz FHSS Transceiver Module with I/O
 DEVELOPMENT KIT (Info Click here) 900 MHz Frequency Hopping Spread Spectrum Transceiver Point-to-point, Point-to-multipoint, Peer-to-peer and Tree-routing Networks Transmitter Power Configurable from 1
DEVELOPMENT KIT (Info Click here) 900 MHz Frequency Hopping Spread Spectrum Transceiver Point-to-point, Point-to-multipoint, Peer-to-peer and Tree-routing Networks Transmitter Power Configurable from 1
DNT90MC DNT90MP. Low Cost 900 MHz FHSS Transceiver Modules with I/O
 - 900 MHz Frequency Hopping Spread Spectrum Transceivers - Direct Peer-to-peer Low Latency Communication - Transmitter Power Configurable to 40 or 158 mw - 100 kbps RF Data Rate - Serial Port Data Rate
- 900 MHz Frequency Hopping Spread Spectrum Transceivers - Direct Peer-to-peer Low Latency Communication - Transmitter Power Configurable to 40 or 158 mw - 100 kbps RF Data Rate - Serial Port Data Rate
Figure 1: One Possible Advanced Control System
 Control and Navigation 3 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
Control and Navigation 3 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
MT6803 Magnetic Angle Sensor IC
 Features and Benefits Based on advanced magnetic field sensing technology Measures magnetic field direction rather than field intensity Contactless angle measurement Large air gap Excellent accuracy, even
Features and Benefits Based on advanced magnetic field sensing technology Measures magnetic field direction rather than field intensity Contactless angle measurement Large air gap Excellent accuracy, even
LAX016 Series Logic Analyzer User Guide
 LAX016 Series Logic Analyzer User Guide QQ: 415942827 1 Contents I Overview... 4 1 Basic knowledge... 4 2 Product series... 4 3 Technical specification... 5 II Brief introduction to JkiSuite software...
LAX016 Series Logic Analyzer User Guide QQ: 415942827 1 Contents I Overview... 4 1 Basic knowledge... 4 2 Product series... 4 3 Technical specification... 5 II Brief introduction to JkiSuite software...
Controlling DC Brush Motor using MD10B or MD30B. Version 1.2. Aug Cytron Technologies Sdn. Bhd.
 PR10 Controlling DC Brush Motor using MD10B or MD30B Version 1.2 Aug 2008 Cytron Technologies Sdn. Bhd. Information contained in this publication regarding device applications and the like is intended
PR10 Controlling DC Brush Motor using MD10B or MD30B Version 1.2 Aug 2008 Cytron Technologies Sdn. Bhd. Information contained in this publication regarding device applications and the like is intended
Interfacing to External Devices
 Interfacing to External Devices Notes and/or Reference 6.111 October 18, 2016 Huge Amount of Self-Contained Devices Sensors A-to-D converters D-to-A Memory Microcontrollers Etc We need ability/fluency
Interfacing to External Devices Notes and/or Reference 6.111 October 18, 2016 Huge Amount of Self-Contained Devices Sensors A-to-D converters D-to-A Memory Microcontrollers Etc We need ability/fluency
EE 308 Spring S12 SUBSYSTEMS: PULSE WIDTH MODULATION, A/D CONVERTER, AND SYNCHRONOUS SERIAN INTERFACE
 9S12 SUBSYSTEMS: PULSE WIDTH MODULATION, A/D CONVERTER, AND SYNCHRONOUS SERIAN INTERFACE In this sequence of three labs you will learn to use the 9S12 S hardware sybsystem. WEEK 1 PULSE WIDTH MODULATION
9S12 SUBSYSTEMS: PULSE WIDTH MODULATION, A/D CONVERTER, AND SYNCHRONOUS SERIAN INTERFACE In this sequence of three labs you will learn to use the 9S12 S hardware sybsystem. WEEK 1 PULSE WIDTH MODULATION
Datasheet of the Easy Servo Drive ES-D VAC or VDC, 8.2A Peak, Close-loop, No Tuning. Version
 Datasheet of the Easy Servo Drive ES-D1008 0-70 V or 30-100VDC, 8.A Peak, Close-loop, No Tuning Version 0.1.0 http://www.leadshine.com Features Step and direction control Closed position loop for no loss
Datasheet of the Easy Servo Drive ES-D1008 0-70 V or 30-100VDC, 8.A Peak, Close-loop, No Tuning Version 0.1.0 http://www.leadshine.com Features Step and direction control Closed position loop for no loss
M7 Over-The-Air Protocol. Overview. Technical Brief AN187 Rev A1
 Technical Brief AN187 Rev A1 M7 Over-The-Air Protocol By John Sonnenberg Raveon Technologies Corp Overview The M7 GX series of GPS transponders may be directly connected to a Garmin GPS 152H navigation
Technical Brief AN187 Rev A1 M7 Over-The-Air Protocol By John Sonnenberg Raveon Technologies Corp Overview The M7 GX series of GPS transponders may be directly connected to a Garmin GPS 152H navigation
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge
 Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING
 ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING 1 HARSHUL BALANI, 2 CHARU GUPTA, 3 KRATIKA SUKHWAL 1,2,3 B.TECH (ECE), Poornima College Of Engineering, RTU E-mail; 1 harshul.balani@gmail.com, 2 charu95g@gmail.com,
ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING 1 HARSHUL BALANI, 2 CHARU GUPTA, 3 KRATIKA SUKHWAL 1,2,3 B.TECH (ECE), Poornima College Of Engineering, RTU E-mail; 1 harshul.balani@gmail.com, 2 charu95g@gmail.com,
ES86 Series Closed-loop Stepper Drive + Motor System (ES-D808 Drive+ Motor/Encoder)
") ES86 Series Closed-loop Stepper Drive + Motor System (ES-D808 Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because
ES86 Series Closed-loop Stepper Drive + Motor System (ES-D808 Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because
Integrated Easy Servo
 ies 1706 Integrated Easy Servo Motor + Drive + Encoder, 18 32VDC, NEMA17, 0.6Nm Features Easy servo control technology to combine advantages of open loop stepper systems and brushless servo systems Closed
ies 1706 Integrated Easy Servo Motor + Drive + Encoder, 18 32VDC, NEMA17, 0.6Nm Features Easy servo control technology to combine advantages of open loop stepper systems and brushless servo systems Closed
Series SPPM2 Graphical User Interface Panel Meter. Specifications - Installation and Operating Instructions MINI USB PORT
 Series SPPM Graphical User Interface Panel Meter Bulletin PCSPPM Specifications Installation and Operating Instructions / [9.0] 9/ [9.] / [9.9] / [.9] / [.] 9/ [9.] JTAG [FOR INTERNAL USE] ALARMS, SERIAL
Series SPPM Graphical User Interface Panel Meter Bulletin PCSPPM Specifications Installation and Operating Instructions / [9.0] 9/ [9.] / [9.9] / [.9] / [.] 9/ [9.] JTAG [FOR INTERNAL USE] ALARMS, SERIAL
DMP Electronics Inc Robotic Division
 DMP Electronics Inc Robotic Division Jul 2009 Agenda DMP SoC Family RB-100 Overview Hardware Introduction Accessory Support List Application Q & A DMP s ssoc Family Jul. 1998 Feb. 2007 386 40MHz 486 300MHz
DMP Electronics Inc Robotic Division Jul 2009 Agenda DMP SoC Family RB-100 Overview Hardware Introduction Accessory Support List Application Q & A DMP s ssoc Family Jul. 1998 Feb. 2007 386 40MHz 486 300MHz
ies-2309 Integrated Easy Servo
 Datasheet of the integrated easy servo motor ies-09 ies-09 Integrated Easy Servo Motor + Drive + Encoder, 0-0VDC, NEMA, 0.9Nm Features Easy servo control technology to combine advantages of open-loop stepper
Datasheet of the integrated easy servo motor ies-09 ies-09 Integrated Easy Servo Motor + Drive + Encoder, 0-0VDC, NEMA, 0.9Nm Features Easy servo control technology to combine advantages of open-loop stepper
SGD 43-A 4.3 PanelPilotACE Compatible Display
 is a 4.3 capacitive touch display designed for use with PanelPilotACE Design Studio, a free drag-and-drop style software package for rapid development of advanced user interfaces and panel meters. The
is a 4.3 capacitive touch display designed for use with PanelPilotACE Design Studio, a free drag-and-drop style software package for rapid development of advanced user interfaces and panel meters. The
TMS320F241 DSP Boards for Power-electronics Applications
 TMS320F241 DSP Boards for Power-electronics Applications Kittiphan Techakittiroj, Narong Aphiratsakun, Wuttikorn Threevithayanon and Soemoe Nyun Faculty of Engineering, Assumption University Bangkok, Thailand
TMS320F241 DSP Boards for Power-electronics Applications Kittiphan Techakittiroj, Narong Aphiratsakun, Wuttikorn Threevithayanon and Soemoe Nyun Faculty of Engineering, Assumption University Bangkok, Thailand
SPI, Talking to Chips, and Minimizing Noise
 Jonathan Mitchell 996069032 Stark Industries Application Note SPI, Talking to Chips, and Minimizing Noise How do you communicate with a piece of silicon? How do you communicate with a semiconductor. SPI
Jonathan Mitchell 996069032 Stark Industries Application Note SPI, Talking to Chips, and Minimizing Noise How do you communicate with a piece of silicon? How do you communicate with a semiconductor. SPI
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Introduction to the EXPANSION HUB
 Introduction to the EXPANSION HUB REV ROBOTICS - EXPANSION HUB revrobotics.com ANOTHER CONTROLLER CHOICE MODERN ROBOTICS REV ROBOTICS The Expansion hub does not replace the Modern Robotics System. It is
Introduction to the EXPANSION HUB REV ROBOTICS - EXPANSION HUB revrobotics.com ANOTHER CONTROLLER CHOICE MODERN ROBOTICS REV ROBOTICS The Expansion hub does not replace the Modern Robotics System. It is
IN1307N/D/IZ1307 CMOS IC of Real Time Watch with Serial Interface, 56 Х 8 RAM
 CMOS IC of Real Time Watch with Serial Interface, 56 Х 8 RAM The IN307 is a low power full BCD clock calendar plus 56 bytes of nonvolatile SRAM. Address and data are transferred serially via a 2-wire bi-directional
CMOS IC of Real Time Watch with Serial Interface, 56 Х 8 RAM The IN307 is a low power full BCD clock calendar plus 56 bytes of nonvolatile SRAM. Address and data are transferred serially via a 2-wire bi-directional
Dual Protocol Transceivers Ease the Design of Industrial Interfaces
 Dual Protocol Transceivers Ease the Design of Industrial Interfaces Introduction The trend in industrial PC designs towards smaller form factors and more communication versatility is driving the development
Dual Protocol Transceivers Ease the Design of Industrial Interfaces Introduction The trend in industrial PC designs towards smaller form factors and more communication versatility is driving the development
ZKit-51-V664, 8051 Development Kit
 ZKit-51-V664, 8051 Development Kit User Manual 2.0, Oct 2013 This work is licensed under the Creative Commons Attribution-Share Alike 2.5 India License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.5/in/
ZKit-51-V664, 8051 Development Kit User Manual 2.0, Oct 2013 This work is licensed under the Creative Commons Attribution-Share Alike 2.5 India License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.5/in/
CL86T. 24~80VDC, 8.2A Peak, Closed-loop, No Tuning. Descriptions. Closed-loop. Stepper. Applications. Datasheet of the Closed-loop Stepper CL86T
 CL86T Closed-loop Stepper 24~80VDC, 8.2A Peak, Closed-loop, No Tuning Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor heating and more
CL86T Closed-loop Stepper 24~80VDC, 8.2A Peak, Closed-loop, No Tuning Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor heating and more