Development of intelligent systems
|
|
|
- Cameron Ferguson
- 5 years ago
- Views:
Transcription
1 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems


2 Robotic sensors Sensors Robot platforms Development of intelligent systems, Robot sensors 2
3 Sensors Equivalent to human senses Acquire information from the environment Electronic/mechanic/chemical device that maps the attributes of the environment into a quantitative measurement Robot can differentiate only between the states in the environment, which can be sensed differently see AGENT action ENVIRONMENT Development of intelligent systems, Robot sensors 3
4 Perception action cycle Significant abstraction of the real world sense perception modelling planning task execution motor control act Development of intelligent systems, Robot sensors 4
 Active vision (radar, LIDAR) Hearing beyond the range 20 Hz-20 khz (ultrasound) Chemical analysis for better taste and smell Measurement of temperature, humidity, illumination, radiation, pressure,")
5 Senses Human senses: The list of robot senses is much longer! Beyond human capabilities Vision beyond visual spectrum (IR cameras, etc.) Active vision (radar, LIDAR) Hearing beyond the range 20 Hz-20 khz (ultrasound) Chemical analysis for better taste and smell Measurement of temperature, humidity, illumination, radiation, pressure, volume, position, direction, acceleration, velocity, etc. Development of intelligent systems, Robot sensors 5
6 Classification of sensors Proprioceptive and exteroceptive sensors Proprioceptive: measure internal states of the robot (batter status, position of wheels, angle between the segments in the robot arm) Exteroceptive: measure the state of the environment (majority of the sensors) Passive and active sensors Passive: only receive the energy from the environment (e.g., camera) Active: also emit the energy in the environment (e.g., radar) Noninvasive and invasive sensors Noninvasive (contactless): no contact with the object Invasive: measurement with contact Visual, non-visual Development of intelligent systems, Robot sensors 6

7 Classification of sensors Development of intelligent systems, Robot sensors 7

8 Classification of sensors Development of intelligent systems, Robot sensors 8















9 Sensors in robots Gas Sensor Piezo Bend Sensor Pendulum Resistive Tilt Sensors Metal Detector Gieger-Muller Radiation Sensor UV Detector Pyroelectric Detector Resistive Bend Sensors Digital Infrared Ranging CDS Cell Resistive Light Sensor Pressure Switch Limit Switch Mechanical Tilt Sensors Touch Switch Miniature Polaroid Sensor IR Pin Diode IR Sensor w/lens Gyro Thyristor Magnetic Sensor Polaroid Sensor Board IR Reflection Sensor IR Amplifier Sensor IRDA Transceiver Accelerometer Magnetic Reed Switch Hall Effect Magnetic Field Sensors Lite-On IR Remote Receiver Radio Shack Remote Receiver IR Modulator Receiver Solar Cell Development of intelligent systems, Robot sensors 9 Compass Compass Piezo Ultrasonic Transducers
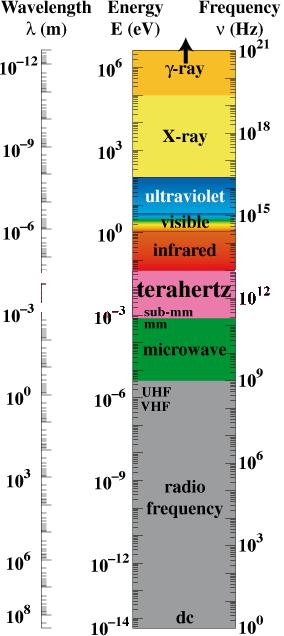







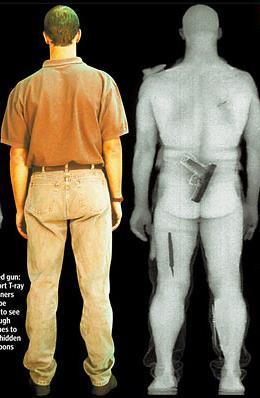
10 Cameras Electromagnetic spectrum Visual light Near infrared light (NIR) Long-wavelength infrared light (FLIR) Terahertz light (T-ray) Development of intelligent systems, Robot sensors 10

11 Sensing EM radiation Development of intelligent systems, Robot sensors 11
12 Resistive sensors Band sensor The resistance changes by bending the sensor Potentiometer Position sensor in sliding or rotating mechanisms Photoresistor Small resistance at high illumination Light detection Sensor Sensors Sensor Development of intelligent systems, Robot sensors 12


13 Infrared sensors Intensity IR sensors Emit an receive IR light Photo-transistor Sensitive on daylight, reflections, distance Robust, cheap Application: object detection, optical encoder Modulated IR sensors Modulation in demodulation Pulse detection More robust IR remotes, itn. Development of intelligent systems, Robot sensors 13
14 Infrared sensors Range sensors Measuring angle between the emitted and received light -> triangulation Non-sensitive on ambient light Development of intelligent systems, Robot sensors 14


15 Measuring rotation Incremental Optical Encoders Relative rotation light sensor light emitter decode circuitry Incremental Optical Encoders Absolute position Gray code Development of intelligent systems, Robot sensors 15



16 Inertial sensors Gyroscope Measuring change of orientation based on the principles of angular momentum Accelerometer Measures acceleration, also orientation Uniaxial, triaxial Vibration sensor, vibration analysis, detection of orientation Nintendo Wii, smart phones Development of intelligent systems, Robot sensors 16



17 Compass Electronic compass Absolute orientation of the robot N, S, E, W Development of intelligent systems, Robot sensors 17



")

18 GPS Global Positioning System 24 satellites at the height of km Atomic clock Satellite emit the time and position data At least 4 satellites should be visible Differential GPS additional (terrestrial) signals are considered Development of intelligent systems, Robot sensors 18




19 Tactile sensors Haptic technology Buttons, switches Bumpers (collision sensors) Touch sensors on the robot arm Different types: Piezoresistive Piezoelectric Capacitive Elastoresistive Artificial skin Development of intelligent systems, Robot sensors 19



20 Acustic sensors Perception of sound Sonar Microphone Array of microphones Detection the sound direction Development of intelligent systems, Robot sensors 20
21 Range sesnsors Stereo vision Shape from X Coded light range sensor IR range sensor Time Of Flight sensors Emit the signal, wait until it is back, measure the time RADAR SONAR LIDAR ToF cameras Development of intelligent systems, Robot sensors 21

22 Sonar Emits ultrasound Measure the time Bat, dolphin From a couple of cm to 30 m 30 degrees angular accuracy Quite slow: 200ms for 30m Development of intelligent systems, Robot sensors 22

23 Sonar Usage: Mapping of space Doorway chair Robot Length of Echo chair Scan moving from left to right Problem: noise, interference Development of intelligent systems, Robot sensors 23
 Emits laser")
 Vertical")


24 Laser range sensors LIDAR (Light Detection And Ranging) Emits laser pulses Rotating mirror different angles (up to 180 degrees) Vertical movement the entire hemisphere Better angular accuracy (0.25 degrees) Faster Different ranges, indoor, outdoor Robust Development of intelligent systems, Robot sensors 24



25 TOF cameras Time-of-flight cameras Time of pulse travel Development of intelligent systems, Robot sensors 25






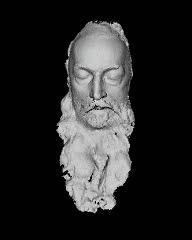
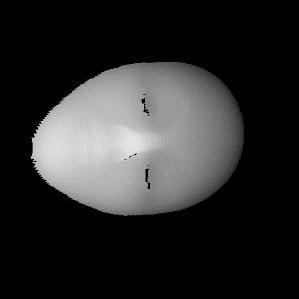
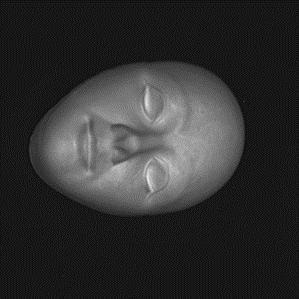
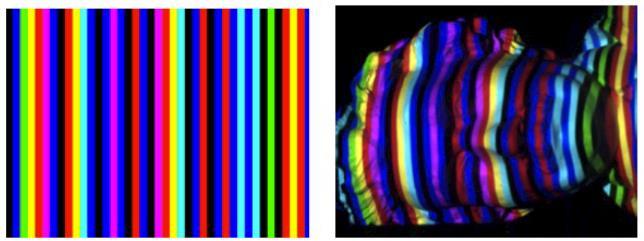

26 Coded light range sensor Camera and stripe projector s v u Color coding: Development of intelligent systems, Robot sensors 26



27 Stereo cameras Development of intelligent systems, Robot sensors 27
28 Other sensors Exteroceptive sensors Wind speed Temperature Humidity Proprioceptive sensors Baterry level Temperature of CPU, motors, sensors, etc. Development of intelligent systems, Robot sensors 28
29 Sensor fusion One sensor often does not suffice Noise Limited accuracy Non-reliabilty Limited sensing range =>Fuse the results of several sensors Sensor fusion: fusion on the level of sensors Combine signals in one data structure on a low level Sensor integration: Fusion on the level of representations Process data from every sensor independently and merge the obtained information on a higher level Fusion of data from multiple sources: Measurement from different sensors Measurement from different times Measurement from different locations Development of intelligent systems, Robot sensors 29
30 irobot Roomba Actuators and sensors Development of intelligent systems, Robot sensors 30
 wheels brushes")

31 Motors Changeable speed of the wheels pulse-width modulation (PWM) wheels brushes vacuum cleaner On/off motors for brushes and vacuum cleaner Development of intelligent systems, Robot sensors 31



32 Wheels Differential control system Two independently controlled wheels Electric motor high speed 25:1 reduction large torque Development of intelligent systems, Robot sensors 32
33 Sensors bumper base wall cliff odometry buttons dirt wheels Development of intelligent systems, Robot sensors 33
34 IR sensors IR sensors base bumper odometry wall cliff Micro switches: buttons wheels Capacitive sensor: dirt Development of intelligent systems, Robot sensors 34
35 Power supply Measuring power supply capacitance of the accumulator [mah] voltage [V] current [A] temperature connectors Development of intelligent systems, Robot sensors 35
36 Indicators Led lights Status (green, red) Dirt detection (blue) Speaker piezoelectric beeper status dirt speaker Development of intelligent systems, Robot sensors 36

37 RGBD sensor Kinect PrimeSense sensor Development of intelligent systems, Robot sensors 37



38 Components IR projector IR camera RGB camera Development of intelligent systems, Robot sensors 38
39 Scheme Development of intelligent systems, Robot sensors 39
40 Projected pattern Development of intelligent systems, Robot sensors 40

41 Projected pattern Development of intelligent systems, Robot sensors 41

42 Patent Development of intelligent systems, Robot sensors 42

43 Patent Development of intelligent systems, Robot sensors 43


44 RGBD information Development of intelligent systems, Robot sensors 44
45 Literature Dr. John (Jizhong) Xiao, City College of New York, Robot Sensing and Sensors Tod E. Kurt, Hacking Roomba: ExtremeTech, Wiley, Teardown/4066/3 Futurepicture, United States Patent, Garcia et. al, Patent No. 7,433,024 B2 other Development of intelligent systems, Robot sensors 45
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Introduction to ROBOTICS. Robot Sensing and Sensors
 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu 1 Brief Review (Mobot Locomotion) 2 ICR of wheeled
Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu 1 Brief Review (Mobot Locomotion) 2 ICR of wheeled
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lecture: Sensors , Fall 2008
 All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
Degree of mobility Degree of steerability
 1 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu Brief Review (Mobot Locomotion) 1 2 ICR of
1 Introduction to ROBOTICS Robot Sensing and Sensors Dr. John (Jizhong) Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu Brief Review (Mobot Locomotion) 1 2 ICR of
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
Shock Sensor Module This module is digital shock sensor. It will output a high level signal when it detects a shock event.
 Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
CSE 165: 3D User Interaction. Lecture #7: Input Devices Part 2
 CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
Make: Sensors. Tero Karvinen, Kimmo Karvinen, and Ville Valtokari. (Hi MAKER MEDIA SEBASTOPOL. CA
 Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
Electronics Design Laboratory Lecture #11. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Electronics, Sensors, and Actuators
 Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Mechatronics System Design - Sensors
 Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Electronics II. Calibration and Curve Fitting
 Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Objective Find components on Digikey Electronics II Calibration and Curve Fitting Determine the parameters for a sensor from the data sheets Predict the voltage vs. temperature relationship for a thermistor
Time of Flight Capture
 Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Lecture Notes Prepared by Prof. J. Francis Spring Remote Sensing Instruments
 Lecture Notes Prepared by Prof. J. Francis Spring 2005 Remote Sensing Instruments Material from Remote Sensing Instrumentation in Weather Satellites: Systems, Data, and Environmental Applications by Rao,
Lecture Notes Prepared by Prof. J. Francis Spring 2005 Remote Sensing Instruments Material from Remote Sensing Instrumentation in Weather Satellites: Systems, Data, and Environmental Applications by Rao,
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
ELECTROMAGNETIC WAVES AND THE EM SPECTRUM MR. BANKS 8 TH GRADE SCIENCE
 ELECTROMAGNETIC WAVES AND THE EM SPECTRUM MR. BANKS 8 TH GRADE SCIENCE ELECTROMAGNETIC WAVES Do not need matter to transfer energy. Made by vibrating electric charges. When an electric charge vibrates,
ELECTROMAGNETIC WAVES AND THE EM SPECTRUM MR. BANKS 8 TH GRADE SCIENCE ELECTROMAGNETIC WAVES Do not need matter to transfer energy. Made by vibrating electric charges. When an electric charge vibrates,
By Pierre Olivier, Vice President, Engineering and Manufacturing, LeddarTech Inc.
 Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
MEM380 Applied Autonomous Robots I Fall Introduction to Sensors & Perception
 MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Velocity and Acceleration Measurements
 Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Industrial Sensors. Proximity Mechanical Optical Inductive/Capacitive. Position/Velocity Potentiometer LVDT Encoders Tachogenerator
 Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Introduction to Arduino HW Labs
 Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Physics. Waves and Radiation Homework Exercises. National 4 & 5. Clackmannanshire Physics Network 0914
 Physics National 4 & 5 Waves and Radiation ----- 0914 Summary Homework 1: Homework 2: Homework 3: Homework 4: Homework 5: Homework 6: Homework 7: Waves I -Wave definitions - Speed, distance, time calculations
Physics National 4 & 5 Waves and Radiation ----- 0914 Summary Homework 1: Homework 2: Homework 3: Homework 4: Homework 5: Homework 6: Homework 7: Waves I -Wave definitions - Speed, distance, time calculations
Sonic Distance Sensors
 Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
electronics for computer engineering (Sensor) by KrisMT Computer Engineering, ICT, University of Phayao
 by KrisMT Computer Engineering, ICT, University of Phayao") 305222 electronics for computer engineering (Sensor) by KrisMT Computer Engineering, ICT, University of Phayao ห วข อ Sensor =? Each type of sensor Technology Interpolation Sensor =? is a device that measures
305222 electronics for computer engineering (Sensor) by KrisMT Computer Engineering, ICT, University of Phayao ห วข อ Sensor =? Each type of sensor Technology Interpolation Sensor =? is a device that measures
Sensors. Chapter 3. Storey: Electrical & Electronic Systems Pearson Education Limited 2004 OHT 3.1
 Sensors Chapter 3 Introduction Describing Sensor Performance Temperature Sensors Light Sensors Force Sensors Displacement Sensors Motion Sensors Sound Sensors Sensor Interfacing Storey: Electrical & Electronic
Sensors Chapter 3 Introduction Describing Sensor Performance Temperature Sensors Light Sensors Force Sensors Displacement Sensors Motion Sensors Sound Sensors Sensor Interfacing Storey: Electrical & Electronic
Actuator Components 2
 Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input
 IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
Sensors for Mechatronics
 Sensors for Mechatronics Paul P.L Regtien Hertgelo The Netherlands AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK' OXFORD ELSEVIER PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Contents Preface xi
Sensors for Mechatronics Paul P.L Regtien Hertgelo The Netherlands AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK' OXFORD ELSEVIER PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Contents Preface xi
Actuators, sensors and control architecture
 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Classifying 3D Input Devices
 IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Motivation The mouse and keyboard
IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Motivation The mouse and keyboard
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
746A27 Remote Sensing and GIS
 746A27 Remote Sensing and GIS Lecture 1 Concepts of remote sensing and Basic principle of Photogrammetry Chandan Roy Guest Lecturer Department of Computer and Information Science Linköping University What
746A27 Remote Sensing and GIS Lecture 1 Concepts of remote sensing and Basic principle of Photogrammetry Chandan Roy Guest Lecturer Department of Computer and Information Science Linköping University What
TurtleBot2&ROS - Learning TB2
 TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
IVR: Sensing Self-Motion 26/02/2015
 IVR: Sensing Self-Motion 26/02/2015 Overview Proprioception Sensors for self-sensing in biological systems proprioception vestibular system in robotic systems velocity and acceleration sensing force sensing
IVR: Sensing Self-Motion 26/02/2015 Overview Proprioception Sensors for self-sensing in biological systems proprioception vestibular system in robotic systems velocity and acceleration sensing force sensing
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Physics in Entertainment and the Arts
 Physics in Entertainment and the Arts Chapter IV The Fine Arts Spectra; Some Second Looks at Waves Spectra of Continuous Waves A wave s spectrum is the range of frequencies the waves cover For sound the
Physics in Entertainment and the Arts Chapter IV The Fine Arts Spectra; Some Second Looks at Waves Spectra of Continuous Waves A wave s spectrum is the range of frequencies the waves cover For sound the
Entry #287 SONORAN ULTRASONIC CAVE MAPPING PLATFORM PSOC DESIGN CONTEST entry #287. Page 1
 SONORAN ULTRASONIC CAVE MAPPING PLATFORM PSOC DESIGN CONTEST 2002 entry #287 Page 1 ABSTRACT Even though we associate someone who is "as blind as a bat" as a person with poor imaging capabilities, the
SONORAN ULTRASONIC CAVE MAPPING PLATFORM PSOC DESIGN CONTEST 2002 entry #287 Page 1 ABSTRACT Even though we associate someone who is "as blind as a bat" as a person with poor imaging capabilities, the
Introduction. Learning Objectives. On completion of this class you will be able to. 1. Define fiber sensor. 2. List the different types fiber sensors
 Introduction Learning Objectives On completion of this class you will be able to 1. Define fiber sensor 2. List the different types fiber sensors 3. Mech-Zender Fiber optic interferometer Fiber optic sensor
Introduction Learning Objectives On completion of this class you will be able to 1. Define fiber sensor 2. List the different types fiber sensors 3. Mech-Zender Fiber optic interferometer Fiber optic sensor
4.6.1 Waves in air, fluids and solids Transverse and longitudinal waves Properties of waves
 4.6 Waves Wave behaviour is common in both natural and man-made systems. Waves carry energy from one place to another and can also carry information. Designing comfortable and safe structures such as bridges,
4.6 Waves Wave behaviour is common in both natural and man-made systems. Waves carry energy from one place to another and can also carry information. Designing comfortable and safe structures such as bridges,
Experiments with wave, using low-cost amplitude modulated ultrasonic techniques
 Experiments with wave, using low-cost amplitude modulated ultrasonic techniques 1 Low-cost ultrasonic devices Today the ultrasonic devices are in the home, industrial and medicinal applications. These
Experiments with wave, using low-cost amplitude modulated ultrasonic techniques 1 Low-cost ultrasonic devices Today the ultrasonic devices are in the home, industrial and medicinal applications. These
Sensors and Sensing Force, Torque, Tactile and Olfaction
 Sensors and Sensing Force, Torque, Tactile and Olfaction Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 03.12.2015
Sensors and Sensing Force, Torque, Tactile and Olfaction Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 03.12.2015
Electronic Instrumentation and Measurements
 Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Design Project Introduction DE2-based SecurityBot
 Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Input devices and interaction. Ruth Aylett
 Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner
 Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner A Distance Ahead A Distance Ahead: Your Crucial Edge in the Market The new generation of distancebased
Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner A Distance Ahead A Distance Ahead: Your Crucial Edge in the Market The new generation of distancebased
BioInstrumentation Laboratory
 BioInstrumentation Laboratory Ian Hunter Vienna, May 22 2013 BioInstrumentation Lab, Mechanical Engineering, MIT - Robotic endoscopes - Needle-free drug delivery devices - Eye micro-surgery robots - High
BioInstrumentation Laboratory Ian Hunter Vienna, May 22 2013 BioInstrumentation Lab, Mechanical Engineering, MIT - Robotic endoscopes - Needle-free drug delivery devices - Eye micro-surgery robots - High
Angular Position Transducers. inductive magnetoresistive optoelectronic
 Angular Position Transducers inductive magnetoresistive optoelectronic Angular Position Transducers with inductive, magnetoresistive or optoelectronic measuring systems Construction Measuring systems For
Angular Position Transducers inductive magnetoresistive optoelectronic Angular Position Transducers with inductive, magnetoresistive or optoelectronic measuring systems Construction Measuring systems For
Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities.
 Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Modern Robotics Inc. Sensor Documentation
 Modern Robotics Inc. Sensor Documentation Version 1.4.3 December 11, 2017 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button
Modern Robotics Inc. Sensor Documentation Version 1.4.3 December 11, 2017 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button
A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics
 A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics Part Three: how sensors and actuators work and how to hook them up to a microcontroller There are gazillions of different
A very quick and dirty introduction to Sensors, Microcontrollers, and Electronics Part Three: how sensors and actuators work and how to hook them up to a microcontroller There are gazillions of different
Wireless Sensor Networks. EP2980
 Wireless Sensor Networks EP2980 Jonas.Wahslen@sth.kth.se Sensors What to sense? How to sense/measure? Available sensors Technology Medical ECG Pulsoximeter Applications Smart Grid Industrial Automation
Wireless Sensor Networks EP2980 Jonas.Wahslen@sth.kth.se Sensors What to sense? How to sense/measure? Available sensors Technology Medical ECG Pulsoximeter Applications Smart Grid Industrial Automation
Robotics Intelligent sensors (part 1)
") Robotics Intelligent sensors (part 1) Tullio Facchinetti Tuesday 29 th November, 2016 http://robot.unipv.it/toolleeo Position sensors position sensors allow the measurement
Robotics Intelligent sensors (part 1) Tullio Facchinetti Tuesday 29 th November, 2016 http://robot.unipv.it/toolleeo Position sensors position sensors allow the measurement
Toposens GmbH - Blütenstraße München Germany +49 (0)
") Page 1 of 13 Toposens brings vision to technology with groundbreaking 3D sensors based on ultrasound. Sophisticated algorithms enable localization of objects and people in real-time via the principle of
Page 1 of 13 Toposens brings vision to technology with groundbreaking 3D sensors based on ultrasound. Sophisticated algorithms enable localization of objects and people in real-time via the principle of
GraspIT Questions AQA GCSE Physics Waves
 A Waves in air, fluids and solids 1. The diagrams below show two types of wave produced on a slinky spring. A B a. Which one is a transverse wave? (1) Wave B b. What is the name of the other type of wave?
A Waves in air, fluids and solids 1. The diagrams below show two types of wave produced on a slinky spring. A B a. Which one is a transverse wave? (1) Wave B b. What is the name of the other type of wave?
Omni-Directional Catadioptric Acquisition System
 Technical Disclosure Commons Defensive Publications Series December 18, 2017 Omni-Directional Catadioptric Acquisition System Andreas Nowatzyk Andrew I. Russell Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Technical Disclosure Commons Defensive Publications Series December 18, 2017 Omni-Directional Catadioptric Acquisition System Andreas Nowatzyk Andrew I. Russell Follow this and additional works at: http://www.tdcommons.org/dpubs_series
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
Sensors. CS Embedded Systems p. 1/1
 CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
Multi-spectral acoustical imaging
 Multi-spectral acoustical imaging Kentaro NAKAMURA 1 ; Xinhua GUO 2 1 Tokyo Institute of Technology, Japan 2 University of Technology, China ABSTRACT Visualization of object through acoustic waves is generally
Multi-spectral acoustical imaging Kentaro NAKAMURA 1 ; Xinhua GUO 2 1 Tokyo Institute of Technology, Japan 2 University of Technology, China ABSTRACT Visualization of object through acoustic waves is generally
PVA Sensor Specifications
 Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Skoog Chapter 1 Introduction
 Skoog Chapter 1 Introduction Basics of Instrumental Analysis Properties Employed in Instrumental Methods Numerical Criteria Figures of Merit Skip the following chapters Chapter 2 Electrical Components
Skoog Chapter 1 Introduction Basics of Instrumental Analysis Properties Employed in Instrumental Methods Numerical Criteria Figures of Merit Skip the following chapters Chapter 2 Electrical Components
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture - 03 Sensing So, we have already understood the basics
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture - 03 Sensing So, we have already understood the basics
In the name of God, the most merciful Electromagnetic Radiation Measurement
 In the name of God, the most merciful Electromagnetic Radiation Measurement In these slides, many figures have been taken from the Internet during my search in Google. Due to the lack of space and diversity
In the name of God, the most merciful Electromagnetic Radiation Measurement In these slides, many figures have been taken from the Internet during my search in Google. Due to the lack of space and diversity
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
Robotic Systems ECE 401RB Fall 2007
 Robotic Systems ECE 401RB Fall 2007 Lecture 3: Sensors, Part 2 I. Touch Sensors The following notes are from: Chapter 6, James L. Fuller, Robotics: Introduction, Programming, and Projects, Second Edition,
Robotic Systems ECE 401RB Fall 2007 Lecture 3: Sensors, Part 2 I. Touch Sensors The following notes are from: Chapter 6, James L. Fuller, Robotics: Introduction, Programming, and Projects, Second Edition,
Chapter 22. Electromagnetic Waves
 Ch-22-1 Chapter 22 Electromagnetic Waves Questions 1. The electric field in an EM wave traveling north oscillates in an east-west plane. Describe the direction of the magnetic field vector in this wave.
Ch-22-1 Chapter 22 Electromagnetic Waves Questions 1. The electric field in an EM wave traveling north oscillates in an east-west plane. Describe the direction of the magnetic field vector in this wave.
RPLIDAR A3. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A3M1. Shanghai Slamtec.Co.,Ltd rev.1.
 www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems
 Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
3D ULTRASONIC STICK FOR BLIND
 3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.