Probabilistic Robotics Course. Robots and Sensors Orazio
|
|
|
- Cathleen Brooke Lewis
- 5 years ago
- Views:
Transcription

1 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti Dept of Computer Control and Management Engineering Sapienza University of Rome
2 Outline Robot Devices Overview of Typical sensors and Actuators Mobile Bases MARRTino Hardware Firmware

 At low level the inputs are the")



3 Mobile Base A mobile platform is a device capable of moving in the environment and carrying a certain load (sensors and actuators) At low level the inputs are the desired velocities of the joints, and the output is the state of the joints At high level it can be controlled with linear/angular velocity, and provides the relative position of the mobiel base w.r.t. an initial instant, obtained by integrating the joint s states (odometry).


4 Sensors for Ego-Motion Wheel encoders mounted on the wheels IMU: Accelerometers Gyros The estimate of ego-motion is obtained by integrating the sensor measurements of these devices. This results in an accumulated drift due to the noise affecting the measurement In absence of an external reference there is no way to recover from these errors
5 Measuring the Environment Perception of the environment Active: Ultrasound Laser range finder Structured-light cameras Infrared Passive: RGB Cameras Tactiles

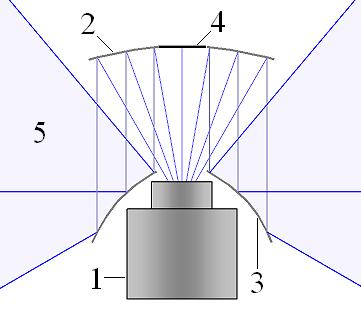
6 Laser Scanner Wide FOV Highly Accurate Approved security for collision detection


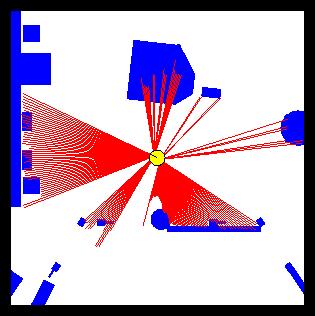
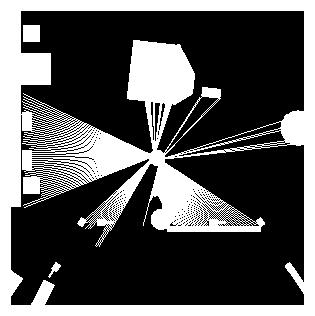
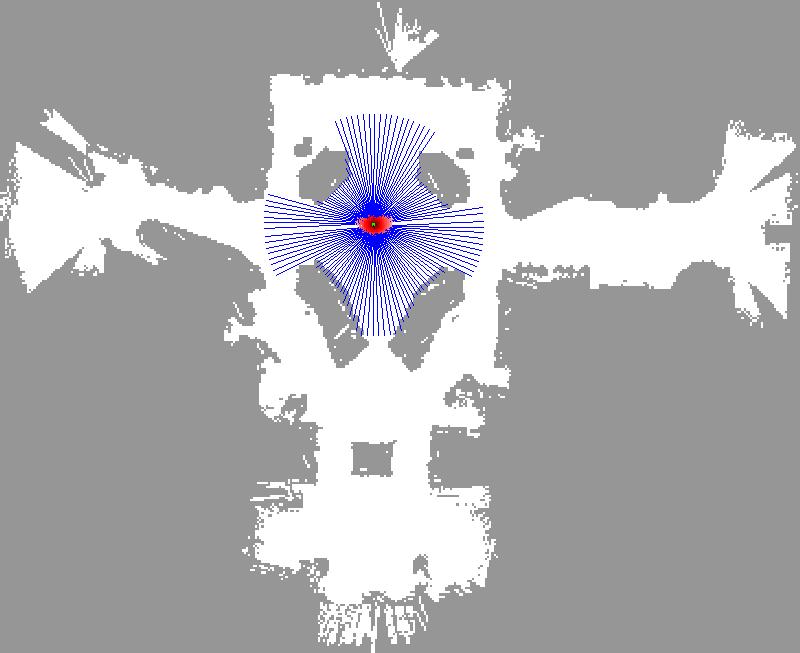
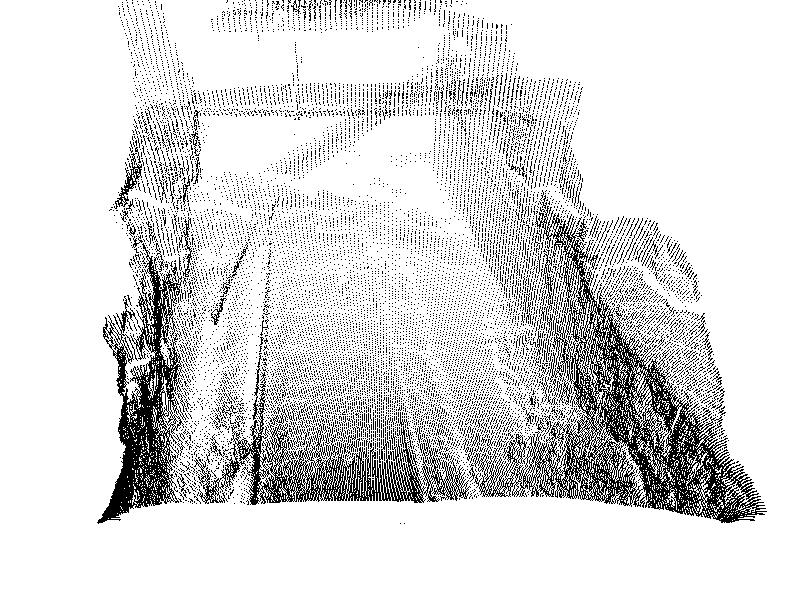
7 Typical Scans

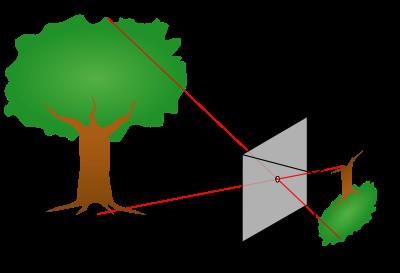



8 RGB Monocular Camera
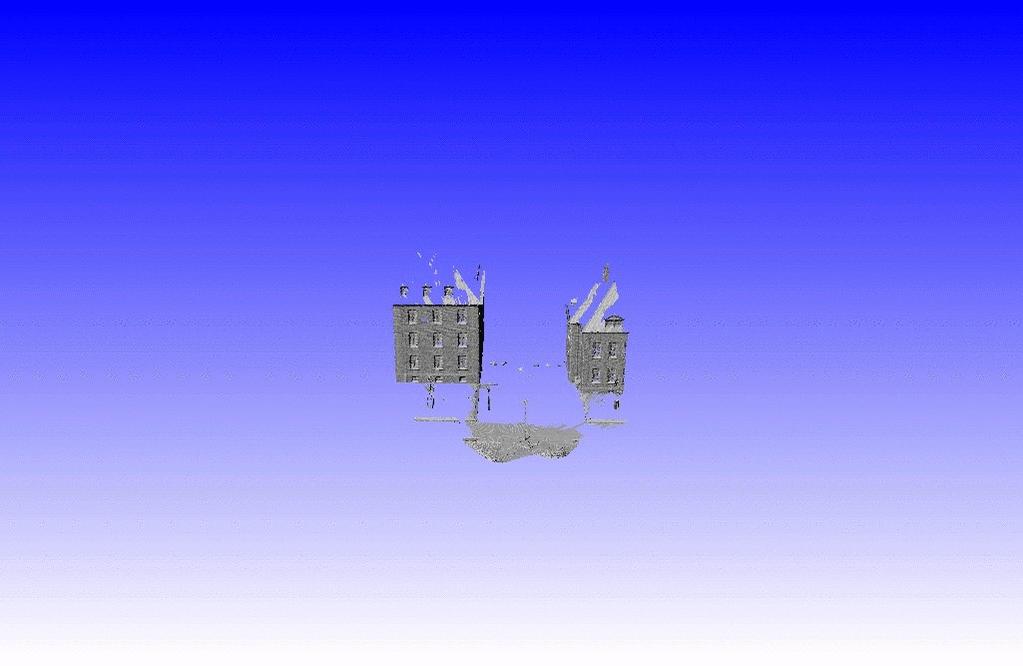
9 RGB Monocular Camera Cameras measure the intensity of the light projected onto a (typically planar) ccd through a system of lenses and/or mirrors Provide a lot of information Project 3D onto 2D, which results in the unobservability of the depth The scene can be reconstructed by multiple images (see SfM)




10 RGB Stereo Camera reconstruction from top Stereo cameras are combination of 2 monocular cameras that allow triangulation, given a known geometry. If the corresponding points in the images are known, we can reconstruct the 3D scene. Error in the depth depends on the distance! Sensible to lack of texture





11 RGBD Cameras Cameras that are able to sense the color and the depth even with poor/no texture Use an active light source and retrieve the depth either via stereo triangulation (emitter and source are in different positions) Time of flight (emitter and source are in the same position) Environment conditions should allow to sense the emitted light. Typically OK indoors

12 MARRtino Is a simple but complete mobile base designed to be used in the MARR course. The cost of the parts is around 300 euro It is entirely open source It is integrated in ROS through a simple node that publishes/subscribes standard topics
13 Orazio Is a simplified yet complete redesign of MARRtino, with the goals of Using easy-to-find hardware (Arduino) Reducing the assembly time (2 hours for non skilled users) It is entirely open source It is integrated in ros through a simple node that publishes/subscribes standard topics Firmware at
14 Electronics Left Left Motor Encoder Right Right Encoder Motor ½ H-Bridge ½ H-Bridge RS232 Controller Board PC

15 Electronics Left Left Motor Encoder Right Right Encoder Motor ½ H-Bridge ½ H-Bridge RS232 Controller Board PC
16 Electronics The PC communicates with arduino through USB Each encoder provides two signals Each PWM requires at least 2 wires The wiring of the PWM depends on the H-Bridge used PC To H Bridge encoders
17 Power Control Board: 6V from one of the batteries H bridges: 12 V from both batteries, 5V from logic The system can either charge the batteries or be powered ON. Left Left Motor Encoder Right Right Encoder Motor ½ H-Bridge 12v ½ H-Bridge Controller Board Battery 12v Controller is powered through USB Controller and H bridges share the GND
18 Encoders Each encoder has two signals (A, B) and requires a 5V voltage supplied by the controller board The encoders are managed by the Quadrature Encoder Module (QEI) of the controller, that takes care of counting ticks and direction Encoder A B 5V Controller Board
 of the controller, that takes care of counting ticks and direction Encoder A B 5V Controller")
19 Encoders Each encoder has two signals (A, B) and requires a 5V voltage supplied by the controller board The encoders are managed by the Quadrature Encoder Module (QEI) of the controller, that takes care of counting ticks and direction Encoder A B 5V Controller Board
20 Encoders Each encoder has two signals (A, B) and requires a 5V voltage supplied by the controller board The encoders are managed by interrupt on edges, that takes care of counting ticks and direction Encoder A B 5V Controller Board

21 H Bridge The motor is connected to the H Bridge, that provides the necessary voltage and current to drive it. The H bridge requires 12V power directly from the battery The controller board controls the H bridge by* A square wave whose duty cycle is proportional to the voltage applied to the motor, that controls the speed (PWM) A direction pin, that reverts the voltage when asserted, causing the motor to rotate in the opposite direction Motor ½ H-Bridge PWM dir Controller Board 12V
 The TTL-RS232 is converted in USB through an FTDI chip The device is visible on Linux as /dev/ttyxxx")
22 PC connection T X R X g n d Controller Board FTDI US B RS232 The robot communicates with the PC through an RS232 interface at TTL levels (0-5V) The TTL-RS232 is converted in USB through an FTDI chip The device is visible on Linux as /dev/ttyxxx PC
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
RPLIDAR A1. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A1M8. Shanghai Slamtec.Co.,Ltd rev.1.
 www.slamtec.com RPLIDAR A1 2018-03-23 rev.1.1 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A1M8 Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 SYSTEM CONNECTION...
www.slamtec.com RPLIDAR A1 2018-03-23 rev.1.1 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A1M8 Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 SYSTEM CONNECTION...
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
RPLIDAR A2. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A2M5 A2M6 OPTMAG. Shanghai Slamtec.Co.,Ltd rev.1.
 2016-10-28 rev.1.0 RPLIDAR A2 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M5 A2M6 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
2016-10-28 rev.1.0 RPLIDAR A2 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M5 A2M6 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
MDM5253 DC Motor Driver Module with Position and Current Feedback User Manual
 MDM5253 DC Motor Driver Module with Position and Current Feedback User Manual Version: 1.0.3 Apr. 2013 Table of Contents I. Introduction 2 II. Operations 2 II.1. Theory of Operation 2 II.2. Running as
MDM5253 DC Motor Driver Module with Position and Current Feedback User Manual Version: 1.0.3 Apr. 2013 Table of Contents I. Introduction 2 II. Operations 2 II.1. Theory of Operation 2 II.2. Running as
RPLIDAR A3. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A3M1. Shanghai Slamtec.Co.,Ltd rev.1.
 www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
RPLIDAR A1. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner rev.2.1. Model: A1M8. Shanghai Slamtec.Co.
 www.slamtec.com 2018-02-05 rev.2.1 RPLIDAR A1 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A1M8 Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 SYSTEM CONNECTION...
www.slamtec.com 2018-02-05 rev.2.1 RPLIDAR A1 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A1M8 Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 SYSTEM CONNECTION...
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
RPLIDAR A2. Introduction and Datasheet. Model: A2M3 A2M4 OPTMAG. Shanghai Slamtec.Co.,Ltd rev.1.0 Low Cost 360 Degree Laser Range Scanner
 RPLIDAR A2 2016-07-04 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M3 A2M4 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
RPLIDAR A2 2016-07-04 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A2M3 A2M4 OPTMAG 4K www.slamtec.com Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION...
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Mars Rover: System Block Diagram. November 19, By: Dan Dunn Colin Shea Eric Spiller. Advisors: Dr. Huggins Dr. Malinowski Mr.
 Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
TurtleBot2&ROS - Learning TB2
 TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
DC Motor and Servo motor Control with ARM and Arduino. Created by:
 DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
16. Sensors 217. eye hand control. br-er16-01e.cdr
 16. Sensors 16. Sensors 217 The welding process is exposed to disturbances like misalignment of workpiece, inaccurate preparation, machine and device tolerances, and proess disturbances, Figure 16.1. sensor
16. Sensors 16. Sensors 217 The welding process is exposed to disturbances like misalignment of workpiece, inaccurate preparation, machine and device tolerances, and proess disturbances, Figure 16.1. sensor
Design Project Introduction DE2-based SecurityBot
 Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
LaserPING Rangefinder Module (#28041)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4
 Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4 B.Tech., Student, Dept. Of EEE, Pragati Engineering College,Surampalem,
Robot Navigation System with RFID and Ultrasonic Sensors A.Seshanka Venkatesh 1, K.Vamsi Krishna 2, N.K.R.Swamy 3, P.Simhachalam 4 B.Tech., Student, Dept. Of EEE, Pragati Engineering College,Surampalem,
Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner
 Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner A Distance Ahead A Distance Ahead: Your Crucial Edge in the Market The new generation of distancebased
Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner A Distance Ahead A Distance Ahead: Your Crucial Edge in the Market The new generation of distancebased
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Signals, Instruments, and Systems W7. Embedded Systems General Concepts and
 Signals, Instruments, and Systems W7 Introduction to Hardware in Embedded Systems General Concepts and the e-puck Example Outline General concepts: autonomy, perception, p action, computation, communication
Signals, Instruments, and Systems W7 Introduction to Hardware in Embedded Systems General Concepts and the e-puck Example Outline General concepts: autonomy, perception, p action, computation, communication
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
Introduction to Arduino HW Labs
 Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
Chapter 2 Sensors. The Author(s) 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2
 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2") Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
DASL 120 Introduction to Microcontrollers
 DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
YDLIDAR G4 DATASHEET. Doc#: 文档编码 :
 YDLIDAR G4 DATASHEET Doc#:01.13.000007 文档编码 :01.13.000008 CONTENTS overview... 2 Product Features... 2 Applications... 2 Installation and dimensions... 2 Specifications... 3 Product parameters... 3 Electrical
YDLIDAR G4 DATASHEET Doc#:01.13.000007 文档编码 :01.13.000008 CONTENTS overview... 2 Product Features... 2 Applications... 2 Installation and dimensions... 2 Specifications... 3 Product parameters... 3 Electrical
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Object Detection for Collision Avoidance in ITS
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Today s Menu. Near Infrared Sensors
 Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Lab 5: Inverted Pendulum PID Control
 Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Developing Applications for the ROBOBO! robot
 Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Electronics, Sensors, and Actuators
 Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Team Description Paper
 Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
RoboTurk 2014 Team Description
 RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Time of Flight Capture
 Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Chapter 7: The motors of the robot
 Chapter 7: The motors of the robot Learn about different types of motors Learn to control different kinds of motors using open-loop and closedloop control Learn to use motors in robot building 7.1 Introduction
Chapter 7: The motors of the robot Learn about different types of motors Learn to control different kinds of motors using open-loop and closedloop control Learn to use motors in robot building 7.1 Introduction
Megamark Arduino Library Documentation
 Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
Experiment (2) DC Motor Control (Direction and Speed)
 DC Motor Control (Direction and Speed)") Introduction Experiment (2) DC Motor Control (Direction and Speed) Controlling direction and speed of DC motor is very essential in many applications like: 1- Robotic application to change direction and
Introduction Experiment (2) DC Motor Control (Direction and Speed) Controlling direction and speed of DC motor is very essential in many applications like: 1- Robotic application to change direction and
Design of double loop-locked system for brush-less DC motor based on DSP
 International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
WheelCommander Wizard User s Manual
 WC-132 WheelCommander WheelCommander Wizard User s Manual Differential Drive Motion Controller for Standard RC Servos and DC Gearhead Motors ---DRAFT--- Copyright 2009, Noetic Design, Inc. 1.01 3/10/2009
WC-132 WheelCommander WheelCommander Wizard User s Manual Differential Drive Motion Controller for Standard RC Servos and DC Gearhead Motors ---DRAFT--- Copyright 2009, Noetic Design, Inc. 1.01 3/10/2009
B Robo Claw 2 Channel 25A Motor Controller Data Sheet
 B0098 - Robo Claw 2 Channel 25A Motor Controller Feature Overview: 2 Channel at 25A, Peak 30A Hobby RC Radio Compatible Serial Mode TTL Input Analog Mode 2 Channel Quadrature Decoding Thermal Protection
B0098 - Robo Claw 2 Channel 25A Motor Controller Feature Overview: 2 Channel at 25A, Peak 30A Hobby RC Radio Compatible Serial Mode TTL Input Analog Mode 2 Channel Quadrature Decoding Thermal Protection
Dynamically Adaptive Inverted Pendulum Platfom
 Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Micromouse Meeting #3 Lecture #2. Power Motors Encoders
 Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
B RoboClaw 2 Channel 30A Motor Controller Data Sheet
 B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
MEM380 Applied Autonomous Robots I Fall Introduction to Sensors & Perception
 MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MOBILE ROBOT CRUISE CONTROLLER
 University of Moratuwa B.Sc. Engineering Robotic Mini project 2006 MOBILE ROBOT CRUISE CONTROLLER By Cader M.F.M.A. (020046) Iynkaran N. (020153) Uthayasanker T. (020400) Department of electronic and telecommunication
University of Moratuwa B.Sc. Engineering Robotic Mini project 2006 MOBILE ROBOT CRUISE CONTROLLER By Cader M.F.M.A. (020046) Iynkaran N. (020153) Uthayasanker T. (020400) Department of electronic and telecommunication
Laser Marking Cards and Laser Marking Software
 1. LMX Series Marking Cards and Software Laser Marking Cards and Laser Marking Software LMX Marking Control Card is especially developed for scan head and laser control in real time with a PCI bus interface.
1. LMX Series Marking Cards and Software Laser Marking Cards and Laser Marking Software LMX Marking Control Card is especially developed for scan head and laser control in real time with a PCI bus interface.
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
INVESTIGATOR UNMANNED GROUND VEHICLE WITH NATURAL HUMAN INTERFACE FOR SURVEILLANCE AND RECONNAISSANCE. By Kevin French
 INVESTIGATOR UNMANNED GROUND VEHICLE WITH NATURAL HUMAN INTERFACE FOR SURVEILLANCE AND RECONNAISSANCE By Kevin French A THESIS PRESENTED TO THE DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING OF THE
INVESTIGATOR UNMANNED GROUND VEHICLE WITH NATURAL HUMAN INTERFACE FOR SURVEILLANCE AND RECONNAISSANCE By Kevin French A THESIS PRESENTED TO THE DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING OF THE
YDLIDAR F4PRO DATASHEET
 YDLIDAR F4PRO DATASHEET Doc#:01.13.000031 文档编码 :01.13.000008 CONTENTS product overview... 2 Product Features... 2 Applications... 2 Installation and dimensions... 2 Specifications... 3 Performance parameters...
YDLIDAR F4PRO DATASHEET Doc#:01.13.000031 文档编码 :01.13.000008 CONTENTS product overview... 2 Product Features... 2 Applications... 2 Installation and dimensions... 2 Specifications... 3 Performance parameters...
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
CSE 165: 3D User Interaction. Lecture #7: Input Devices Part 2
 CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
CSE 165: 3D User Interaction Lecture #7: Input Devices Part 2 2 Announcements Homework Assignment #2 Due tomorrow at 2pm Sony Move check out Homework discussion Monday at 6pm Input Devices CSE 165 -Winter
Prototype Realization
 CHAPTER6 Prototype Realization 6.1 Component Selection The following components have been selected for realization of two prototypes intended for studying intelligent interactive collision avoidance studies
CHAPTER6 Prototype Realization 6.1 Component Selection The following components have been selected for realization of two prototypes intended for studying intelligent interactive collision avoidance studies
PIC Functionality. General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232
 PIC Functionality General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232 General I/O Logic Output light LEDs Trigger solenoids Transfer data Logic Input Monitor
PIC Functionality General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232 General I/O Logic Output light LEDs Trigger solenoids Transfer data Logic Input Monitor
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input
 IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
KMUTT Kickers: Team Description Paper
 KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
Lecture: Sensors , Fall 2008
 All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception