Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt.
|
|
|
- Raymond Calvin Jennings
- 6 years ago
- Views:
Transcription


1 Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich Industrie Digitale Chancen im Facility Management und der Baubranche Ittigen, 20. Oktober, 2016 Roland Siegwart






2 Personal Computer 1981 Technologies Disrupting Services digitalization / industry 4.0 Internet / Information Mobile Devices / Connectivity 2016 Robotics / IoT Cyber-Physical Systems Roland Siegwart

3 Robotics today (Changan-Ford China ) Roland Siegwart industrial robots sold in in China







4 Smart and adaptive, connected, human-friendly exponential Next generation of Robots mobile, smart, connected, adaptive and closer to humans increase of complexity Industrial Robots Service and Personal Robots Cyborgs YuMi Roland Siegwart



5 Fascinating Robots Complex machines OceanOne Humanoid Underwater Robot, Stanford University SpotMini electic quadruped, Boston Dynamics DARPA Robotics Challenge , Team NEDO-JSK, Japan 12 x original speed!! Roland Siegwart



6 Service Robots Key Directions Robots that can dealing with uncertain and partially available information Robots that see, feel and understand their environment 50x speed Robots with torque and force control for tactile interaction ( soft robots ) Robots with intuitive human-machine interfaces Robots that learn and adapt every day Roland Siegwart





7 @ ETH Institute of Robotics and Intelligent Systems Prof. Dr. Roland Siegwart Mission and Dedication To create intelligent robots and systems that operate autonomously in complex and dynamic environments. Research Focus ~ 40 researcher (PhDs, Postdocs, ) ~ 60 master students ~ 10 startups Body Design Brain Navigation Novel robot concepts that are best adapted for ground, air, or water based applications. New algorithms for perception, localization, abstraction, mapping, and path planning that will enable autonomous operation in challenging environments. Roland Siegwart
 the ball balancing robot https://www.youtube.")
 the beach")
 the ultimate")
 the stair-climbing")
8 Ultimate Rolling Robots designed by students rezero (2010) the ball balancing robot BeachBot (2014, with Disney) the beach artist Vertigo (2015 with Disney) the ultimate wall climber Scalevo (2015) the stair-climbing wheelchair Roland Siegwart



9 Walking Robots serial elastic actuation ALOF (2008) the versatile walker StarlETH (2010) the quadruped with serial elastic actuation AnyMal (2015) the ultimate quadruped Prof. Marco Hutter Roland Siegwart




10 Flying Robots new ways of flying OS4 (2003) pioneering quadrotors Reely (2009 with Disney) the flying reel Skye (2012 with Disney) the omnidirectional blimp PacFlyer/wingtra (2013) the VTOL UAV Roland Siegwart

")

11 ? Mobile Robot Navigation (Brain) Localization, Mapping and Planning Roland Siegwart


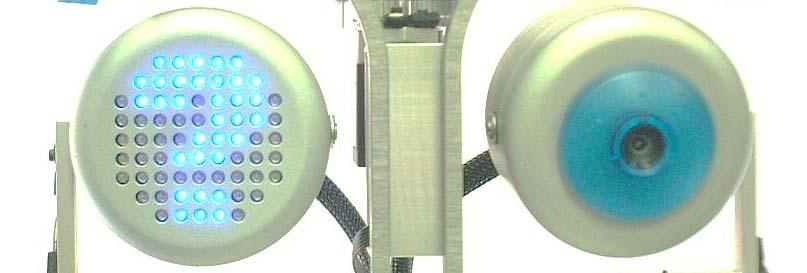
12 Seeing Laser-based 3D mapping Roland Siegwart



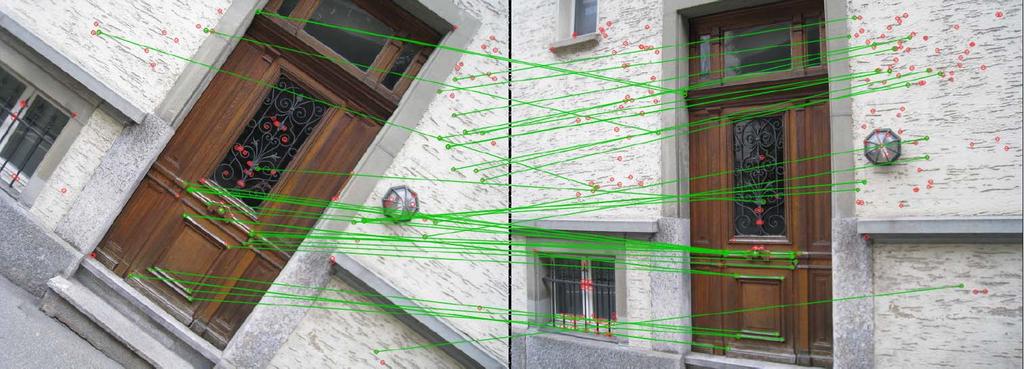
13 Seeing Visual-Inertial Motion Estimation Roland Siegwart


14 Intelligent Smartphone perceiving and understanding the environment phab2pro Lenovo Roland Siegwart

15 Real-time On-board Visual-Inertial Navigation Roland Siegwart








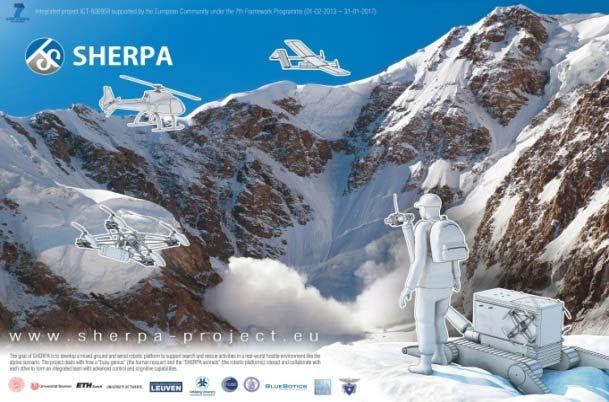

16 Flying Robots EU-Projects Roland Siegwart

17 UAV collision avoidance and path planning Real time 3D mapping (on-board) optimal path planning considering localization uncertainties Proto 2 Proto 1 Proto 3 Roland Siegwart

18 UAV facade scanning and 3D reconstruction Enhanced teleoperation or autonomous operation Visual-inertial localization for optimal 3D reconstruction Proto 1 Proto 2 Proto 3 Roland Siegwart


19 Collaborative Visual-Inertial Navigation in collaboration with Prof. Marco Hutter Roland Siegwart

20 Applications Roland Siegwart
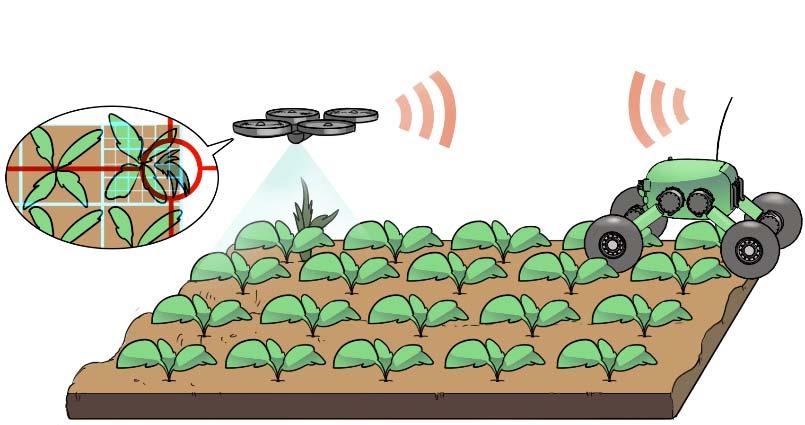
21 Complexity of Services Tactile Manipulation Mobile Manipulation Advanced Interaction Autonomous Navigation Actions from simple motion to complex interaction Robotics Roadmap Toys Household assistant Industrial services Tour-Guides Transportation logistics Tactile manufacturing Vacuum cleaning Agriculture robots Household universal Search and rescue All-terrain navigation Construction robotics Industrial inspection Autonomous car industrial sites Autonomous car freeway 2010 Autonomous car urban Static Structured, 2D Static Unstructured, 3D Dynamic Structured, 2D Dynamic Unstructured, Dynamic 3D Static Environment - from static 2D grid maps to 3D cognitive maps Semantics dynamic 2030 Roland Siegwart









22 Zurich Area a melting pot for robotics technology Initiatives Spin-offs (*ASL) Industrial Collaborations (ASL) * * * Center for Learning Systems EU-Projects ASL * * * * Roland Siegwart
 Roland Siegwart 18.10.")
23 ASL Team Industrial Partners Funding Agencies Current and former ASL Members (2016) Roland Siegwart
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Ground and Aerial Robots for Challenging Environments
 Shaping the future Ground and Aerial Robots for Challenging Environments Roland Siegwart, & Wyss Zurich www.asl.ethz.ch & www.wysszurich.ch Qualcomm Augmented Reality Lecture Series Vienna, April 21, 2016
Shaping the future Ground and Aerial Robots for Challenging Environments Roland Siegwart, & Wyss Zurich www.asl.ethz.ch & www.wysszurich.ch Qualcomm Augmented Reality Lecture Series Vienna, April 21, 2016
Content. Robotik: Möglichkeiten, Trends und Visionen. Introduction. Robotics the challenges and technology drivers. Robot Examples
 Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Driving Force for. How cyber physical systems will change the way of future production
 Driving Force for How cyber physical systems will change the way of future production IMS Institute of Mechatronic Systems Applied Science in Mechatronics The first international event on Fourth Industrial
Driving Force for How cyber physical systems will change the way of future production IMS Institute of Mechatronic Systems Applied Science in Mechatronics The first international event on Fourth Industrial
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks
 Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Human-Centric Trusted AI for Data-Driven Economy
 Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
INSTITUTO de SISTEMAS E ROBÓTICA Institute for Systems and Robotics
 - Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
- Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
ATLAS. High Mobility, Humanoid Robot ROBOT 17 ALLSTARS -
 ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
Digitale Transformation in der Landwirtschaft - Landtechnik im Wandel des 21. Jahrhunderts
 Digitale Transformation in der Landwirtschaft - Landtechnik im Wandel des 21. Jahrhunderts Thomas Herlitzius TU Dresden Professur Agrarsystemtechnik Dresden, 19. Oktober 2016 simul+ Forum Landwirtschaft
Digitale Transformation in der Landwirtschaft - Landtechnik im Wandel des 21. Jahrhunderts Thomas Herlitzius TU Dresden Professur Agrarsystemtechnik Dresden, 19. Oktober 2016 simul+ Forum Landwirtschaft
Joint Open Lab and PHD proposal
 GRUPPO TELECOM ITALIA Joint Open Lab and PHD proposal Politecnico di Torino Aprile 2015 Joint Open Lab : Project at a glance Joint Open Labs are research and innovation laboratories set up within university
GRUPPO TELECOM ITALIA Joint Open Lab and PHD proposal Politecnico di Torino Aprile 2015 Joint Open Lab : Project at a glance Joint Open Labs are research and innovation laboratories set up within university
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Robot on board -- The robot "Athena" carries new impulses for robotics research in its luggage
 Pressemitteilung Max-Planck-Institut für Intelligente Systeme Claudia Däfler 16.12.2014 http://idw-online.de/de/news618494 Buntes aus der Wissenschaft Informationstechnik überregional idw - Informationsdienst
Pressemitteilung Max-Planck-Institut für Intelligente Systeme Claudia Däfler 16.12.2014 http://idw-online.de/de/news618494 Buntes aus der Wissenschaft Informationstechnik überregional idw - Informationsdienst
CSIR R&D in emerging manufacturing technologies. Dr Neil Trollip
 CSIR R&D in emerging manufacturing technologies Dr Neil Trollip Tesla Production Line State of SA Manufacturing sector CSIR Vision: Catalyse re-industrialisation Technologies driving FIR / NIR Fourth Industrial
CSIR R&D in emerging manufacturing technologies Dr Neil Trollip Tesla Production Line State of SA Manufacturing sector CSIR Vision: Catalyse re-industrialisation Technologies driving FIR / NIR Fourth Industrial
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
UNIT 2 TOPICS IN COMPUTER SCIENCE. Emerging Technologies and Society
 UNIT 2 TOPICS IN COMPUTER SCIENCE Emerging Technologies and Society EMERGING TECHNOLOGIES Technology has become perhaps the greatest agent of change in the modern world. While never without risk, positive
UNIT 2 TOPICS IN COMPUTER SCIENCE Emerging Technologies and Society EMERGING TECHNOLOGIES Technology has become perhaps the greatest agent of change in the modern world. While never without risk, positive
Future for industrial policies
 Ref. Ares(2014)4230441-16/12/2014 Future for industrial policies Dr. Alexander Tettenborn Federal Ministry of Economics and Energy The German Digital Economy 228 bn. Sales volume (ICT branch) 79 bn. Sales
Ref. Ares(2014)4230441-16/12/2014 Future for industrial policies Dr. Alexander Tettenborn Federal Ministry of Economics and Energy The German Digital Economy 228 bn. Sales volume (ICT branch) 79 bn. Sales
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION
 PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
IT-RESEARCH FOR OUR FUTURE RESEARCH CENTER HAGENBERG
 IT-RESEARCH FOR OUR FUTURE RESEARCH CENTER HAGENBERG Application-oriented IT research Concepts, methods, algorithms, applications, systems IT solutions for business, industry, society and research Scientific
IT-RESEARCH FOR OUR FUTURE RESEARCH CENTER HAGENBERG Application-oriented IT research Concepts, methods, algorithms, applications, systems IT solutions for business, industry, society and research Scientific
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
THE INNOVATION COMPANY ROBOTICS. Institute for Robotics and Mechatronics
 THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
Digitalization in Aker BP
 Digitalization in Aker BP Subsea Operations Conference 09.08.2018 Camilla Leon, Aker BP DIGITALIZATION IN AKER BP Solid footprint covering entire NCS Skarv (operator) Solid base performance and upside
Digitalization in Aker BP Subsea Operations Conference 09.08.2018 Camilla Leon, Aker BP DIGITALIZATION IN AKER BP Solid footprint covering entire NCS Skarv (operator) Solid base performance and upside
All theses offered at MERLIN (November 2017)
") All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
Ontology-Based Robots Self-Organization in Cyber-Physical Systems
 AMICT 2015, Petrozavodsk, Russia 13.05.2015 Ontology-Based Robots Self-Organization in Cyber-Physical Systems Alexey Kashevnik, e-mail: alexey@iias.spb.su PhD, Senior Researcher Laboratory of Computer
AMICT 2015, Petrozavodsk, Russia 13.05.2015 Ontology-Based Robots Self-Organization in Cyber-Physical Systems Alexey Kashevnik, e-mail: alexey@iias.spb.su PhD, Senior Researcher Laboratory of Computer
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad. Federal Aviation. Administration.
 Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Open Source in Mobile Robotics
 Presentation for the course Il software libero Politecnico di Torino - IIT@Polito June 13, 2011 Introduction Mobile Robotics Applications Where are the problems? What about the solutions? Mobile robotics
Presentation for the course Il software libero Politecnico di Torino - IIT@Polito June 13, 2011 Introduction Mobile Robotics Applications Where are the problems? What about the solutions? Mobile robotics
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
1 Abstract and Motivation
 1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Acknowledgements INTRODUCTION. What is a robot? What is a robot
 Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the textbook. INTRODUCTION
Acknowledgements. Naturally, all errors introduced are my responsibility. cisc3415-fall2013-ozgelen-lect01 2
 INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
INTRODUCTION Acknowledgements These slides are originally generated by Prof. Simon Parsons, which are heavily based on those provided by Roland Siegwart and Illah Nourbakhsh and provided along with the
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
AUTONOMY AND LEARNING IN MOBILE ROBOTS
 AUTONOMY AND LEARNING IN MOBILE ROBOTS George A. Bekey Computer Science Department University of Southern California Los Angeles, CA 90089-0781 bekey@robotics.usc.edu http://www-robotics.usc.edu/ Abstract
AUTONOMY AND LEARNING IN MOBILE ROBOTS George A. Bekey Computer Science Department University of Southern California Los Angeles, CA 90089-0781 bekey@robotics.usc.edu http://www-robotics.usc.edu/ Abstract
Institute of Computer Science, FORTH Prof. Dimitris Plexousakis Director, FORTH-ICS
 Institute of Computer Science, FORTH http://www.ics.forth.gr Prof. Dimitris Plexousakis Director, FORTH-ICS dp@ics.forth.gr ICS Mission To perform high quality basic and applied research, to promote education
Institute of Computer Science, FORTH http://www.ics.forth.gr Prof. Dimitris Plexousakis Director, FORTH-ICS dp@ics.forth.gr ICS Mission To perform high quality basic and applied research, to promote education
Challenges for AI: Mobile Robots on Construction Sites. Tim Detert
 Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Towards shared autonomy for robotic tasks in manufacturing
 Towards shared autonomy for robotic tasks in manufacturing Presenting author: Sharath Chandra Akkaladevi, Profactor GmbH Andreas Pichler, Markus Ikeda, Michael Hofmann, Matthias Plasch, Christian Wögerer,
Towards shared autonomy for robotic tasks in manufacturing Presenting author: Sharath Chandra Akkaladevi, Profactor GmbH Andreas Pichler, Markus Ikeda, Michael Hofmann, Matthias Plasch, Christian Wögerer,
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
IEEE Systems, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities
 IEEE, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities Michael H. Smith IEEE Brain Initiative New York City Three Broad Categories that Span IEEE Development of: novel
IEEE, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities Michael H. Smith IEEE Brain Initiative New York City Three Broad Categories that Span IEEE Development of: novel
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
How Connected Mobility Technology Is Driving The Future Of The Automotive Industry
 How Connected Mobility Technology Is Driving The Future Of The Automotive Industry After over 20 years of advances in the world of mobile connectivity, big data and social networks, technology is now rapidly
How Connected Mobility Technology Is Driving The Future Of The Automotive Industry After over 20 years of advances in the world of mobile connectivity, big data and social networks, technology is now rapidly
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
Human Robotic Systems (HRS): National Robotics Initiative (NRI) & Robotics Technology Pipeline Element
: National Robotics Initiative (NRI) & Robotics Technology Pipeline Element") ABSTRACT The National Robotics Initiative (NRI) is an Office of the Chief Technologist (OCT) effort being worked with the White House to provide grants to universities for research and development in the
ABSTRACT The National Robotics Initiative (NRI) is an Office of the Chief Technologist (OCT) effort being worked with the White House to provide grants to universities for research and development in the
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard