Service Robots in an Intelligent House
|
|
|
- Antony Poole
- 6 years ago
- Views:
Transcription
1 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017
2 OUTLINE Introduction A System to Operate Mobile Robots (VIRBOT) in a House Video

3 Service Robots in an Intelligent House A Robot in Every Home: Overview/The Robotic Future. Bill Gates, Scientific American (2007)
4 Service Robots Service Robots are autonomous or semiautonomous hardware or software systems that perform tasks in complex, dynamically changing environments.
5 Autonomy means the ability to make decisions based on an internal representation of the world, without being controlled by a central instance.
6 Service Robots Capabilities In order to cope with difficult tasks, service robots need basic capabilities: They should be capable of deliberation to perform their tasks in a goal-directed manner. They should be reactive, i.e., react timely and appropriately to unforeseen events and to changes in the environment
7 They should solve their task efficiently by making use of hard-wired procedures in routine situations. Service robots need to be adaptable to changing environmental conditions.
8 Service robots have emerged from a multitude of parental research areas, the most important of which are symbolic Artificial Intelligence (AI), Control Theory, and Digital Signal Processing (DSP).
9 We have developed a system, named the VIRBOT, where operational algorithms for mobile robots can be tested. The system consists of several layers that control the operation of robots.
10 ViRBot System
11 INPUT LAYER This layer process the data from the robot's internal and external sensors, they provide information of the internal state of the robot, as well as, the external world where the robot interacts. In some of our robots designs they have lasers, sonars, infrared, microphones and stereo and RGB-D cameras.
12 INPUT LAYER Digital signal processing techniques are applied to the data provided by the internal and external sensors to obtain a symbolic representation of the data, as well as, to recognize and to process voice and visual data. Pattern recognition techniques are used to create models of the objects and the persons that interact with the robot.

13 INPUT LAYER Vision System For object recognition a system is used that is robust to partial occlusions, scale and rotation and that allows normal movements of the objects and of the camera.


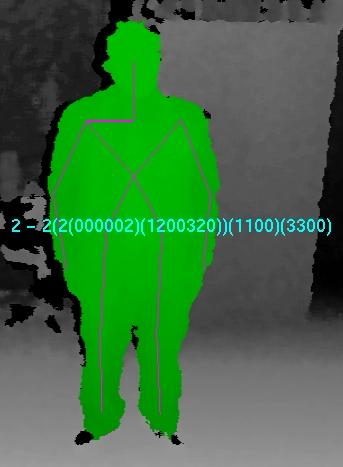
14 INPUT LAYER Vision System Gesture Recognition
15 INPUT LAYER Speech Recognition System Speech Digital Signal Processing Speech Recognition System Natural Language Understanding Perception


16 INPUT LAYER INTERNET OF THINGS Internet of things is used to sense the house's activity. Sensor data can be processed remotely in tablets and smart phones by applications. These applications provide information to the ViRbot system so the robot can make appropriate decisions. KIT SMART THINGS DLINK CAMERAS

17 INPUT LAYER INTERNET OF THINGS
18 INPUT LAYER INTERNET OF THINGS sent by Dlink server To: Jesus Savage Wed, Aug 10, 2016 at 7:05 PM Notifications sent by mydlink+ mydlink+camera4-dcs-932l has detected a motion :38:55 CDT SmartThings server notifications sent to a smartphone :37:28 SmartThingsThere is motion in the Corridor at Home San Miguel Xicalco



19 INPUT LAYER INTERNET OF THINGS Recognition of Human Activities The Use of Hidden Markov Models (HMM) for the Recognition of Human Activities
20 INPUT LAYER With the symbolic representation, this module generates a series of beliefs, that represent the state of the environment where the robot interacts.

21 PERCEPTION Example: In the following figure, the symbolic representation generates the beliefs: "there is a hole in front of the robot" or "there is a shadow in front of the robot"
22 PLANNING LAYER The beliefs generated by the perception module are validated by this layer, it uses the Knowledge Management layer to validate them, thus a situation recognition is created. Given a situation recognition, a set of goals are activated to solve it. Action planning finds a sequence of physical operations to achieve the activated goals.
23 PLANNING LAYER ACTION PLANNER It uses a rule base system that performs searches in a state space representation.


24 PLANNING LAYER Movement Planner: Global Path: Path between rooms. Local Path: Path inside each room.
25 PLANNING LAYER The basic search problem: Given: 1. Starting point (node) 2. The goal point (node) 3. A map of nodes and connections Goals: 1. Find some path or find the best path (maybe shortest) 2. Traverse the path A 3 S B 4 C 5 G D 2 E 4 F 3
26 PLANNING LAYER Artificial Intelligence Techniques to Search for: Some path Optimal path Search Some path Optimal Path Depth-first Hill climbing Breadth-first Beam Best-first British museum Branch and bound A* Dikjstra


27 KNOWLEDGE MANAGMENT LAYER This layer has different types of maps for the representation of the environment, they are created using SLAM techniques.
28 KNOWLEDGE MANAGMENT LAYER Also in this layer there is a localization system, that uses the Kalman filter, to estimate the robot's position and orientation. A rule based system, CLIPS, developed by NASA, is used to represent the robot's knowledge, in which each rule contains the encoded knowledge of an expert.
29 KNOWLEDGE MANAGMENT LAYER Learning: Genetic algorithms and programming Probabilistic methods: Markov chains Bayesian classifiers. Clustering (K-means, Vector Quantization) Artificial Neural Networks
30 EXECUTION LAYER This layer executes the actions and movements plans and it checks that they are executed accordingly. A set of hard-wired procedures, represented by state machines, are used to partially solve specific problems, finding persons, object manipulation, etc. The action planner uses these bank of procedures and it joins some of them to generate a plan.

31 EXECUTION LAYER Behaviour methods are used to avoid obstacles not contemplated by the movements planner. The behaviour methods can be state machines, potential fields and neural networks.

32 EXECUTION LAYER Behaviors Methods Using State Machines
33 EXECUTION LAYER Behaviors Methods Using Potential Fields.
34 EXECUTION LAYER Behaviors Methods Using Artificial Neural Networks.
35 EXECUTION LAYER CONTROL ALGORITHMS Control algorithms, like PID, can be used to control the operation of the virtual and real motors. Vi(t) y(t) + - PID Control h[t]


36 Robots Robot Virtual TX8 Robots TX8 y TPR8


37 Robots Robot PAC-ITO Robot AL-ITA Robot JUST-INA
")
38 Robot Justina Mechatronic Head (Pan and Till) Kinect Stereo Cameras Microphone Torso Kinect Laser Hokuyo Two arms (7 DoF) Mobile Base
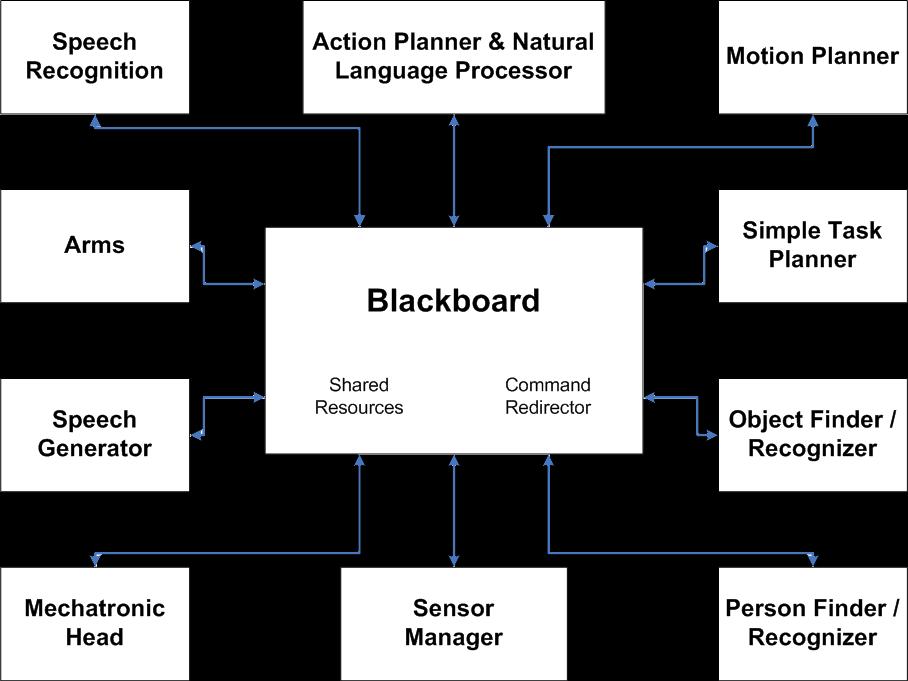
39 Blackboard
40 BLACKBOARD ROBOT OPERATING SYSTEM (ROS) Blackboard Module ROS node ROS 40 BLK
41 Video
42 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017
Simulation of Mobile Robots in Virtual Environments
 Simulation of Mobile Robots in Virtual Environments Jesús Savage 1, Emmanuel Hernández 2, Gabriel Vázquez 3, Humberto Espinosa 4, Edna Márquez 5 Laboratory of Intelligent Interfaces, University of Mexico,
Simulation of Mobile Robots in Virtual Environments Jesús Savage 1, Emmanuel Hernández 2, Gabriel Vázquez 3, Humberto Espinosa 4, Edna Márquez 5 Laboratory of Intelligent Interfaces, University of Mexico,
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Simulation of Mobile Robots in Virtual Environments
 Simulation of Mobile Robots in Virtual Environments Jesús Savage, Emmanuel Hernández, Gabriel Vázquez, Humberto Espinosa, Edna Márquez Laboratory of Intelligent Interfaces, University of Mexico, UNAM.
Simulation of Mobile Robots in Virtual Environments Jesús Savage, Emmanuel Hernández, Gabriel Vázquez, Humberto Espinosa, Edna Márquez Laboratory of Intelligent Interfaces, University of Mexico, UNAM.
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Team Description Paper
 Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Application Areas of AI Artificial intelligence is divided into different branches which are mentioned below:
 Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Autonomous Vehicle Speaker Verification System
 Autonomous Vehicle Speaker Verification System Functional Requirements List and Performance Specifications Aaron Pfalzgraf Christopher Sullivan Project Advisor: Dr. Jose Sanchez 4 November 2013 AVSVS 2
Autonomous Vehicle Speaker Verification System Functional Requirements List and Performance Specifications Aaron Pfalzgraf Christopher Sullivan Project Advisor: Dr. Jose Sanchez 4 November 2013 AVSVS 2
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE
 HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller
 From:MAICS-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller Douglas S. Blank and J. Oliver
From:MAICS-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. Incorporating a Connectionist Vision Module into a Fuzzy, Behavior-Based Robot Controller Douglas S. Blank and J. Oliver
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
OBJECTIVE OF THE BOOK ORGANIZATION OF THE BOOK
 xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
An Integrated HMM-Based Intelligent Robotic Assembly System
 An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
ROBOT CONTROL VIA DIALOGUE. Arkady Yuschenko
 158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Artificial Intelligence for Games
 Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception
 Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Autonomous Localization
 Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
신경망기반자동번역기술. Konkuk University Computational Intelligence Lab. 김강일
 신경망기반자동번역기술 Konkuk University Computational Intelligence Lab. http://ci.konkuk.ac.kr kikim01@kunkuk.ac.kr 김강일 Index Issues in AI and Deep Learning Overview of Machine Translation Advanced Techniques in
신경망기반자동번역기술 Konkuk University Computational Intelligence Lab. http://ci.konkuk.ac.kr kikim01@kunkuk.ac.kr 김강일 Index Issues in AI and Deep Learning Overview of Machine Translation Advanced Techniques in
Understanding the Mechanism of Sonzai-Kan
 Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Space Robotic Capabilities David Kortenkamp (NASA Johnson Space Center)
") Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D.
 Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes
 International Journal of Information and Electronics Engineering, Vol. 3, No. 3, May 13 Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes Soheila Dadelahi, Mohammad Reza Jahed
International Journal of Information and Electronics Engineering, Vol. 3, No. 3, May 13 Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes Soheila Dadelahi, Mohammad Reza Jahed
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
Gilbert Peterson and Diane J. Cook University of Texas at Arlington Box 19015, Arlington, TX
 DFA Learning of Opponent Strategies Gilbert Peterson and Diane J. Cook University of Texas at Arlington Box 19015, Arlington, TX 76019-0015 Email: {gpeterso,cook}@cse.uta.edu Abstract This work studies
DFA Learning of Opponent Strategies Gilbert Peterson and Diane J. Cook University of Texas at Arlington Box 19015, Arlington, TX 76019-0015 Email: {gpeterso,cook}@cse.uta.edu Abstract This work studies
Team Description Paper
 Tinker@Home 2014 Team Description Paper Changsheng Zhang, Shaoshi beng, Guojun Jiang, Fei Xia, and Chunjie Chen Future Robotics Club, Tsinghua University, Beijing, 100084, China http://furoc.net Abstract.
Tinker@Home 2014 Team Description Paper Changsheng Zhang, Shaoshi beng, Guojun Jiang, Fei Xia, and Chunjie Chen Future Robotics Club, Tsinghua University, Beijing, 100084, China http://furoc.net Abstract.
A Hybrid Planning Approach for Robots in Search and Rescue
 A Hybrid Planning Approach for Robots in Search and Rescue Sanem Sariel Istanbul Technical University, Computer Engineering Department Maslak TR-34469 Istanbul, Turkey. sariel@cs.itu.edu.tr ABSTRACT In
A Hybrid Planning Approach for Robots in Search and Rescue Sanem Sariel Istanbul Technical University, Computer Engineering Department Maslak TR-34469 Istanbul, Turkey. sariel@cs.itu.edu.tr ABSTRACT In
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Knowledge Representation and Cognition in Natural Language Processing
 Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Principles of Autonomy and Decision Making. Brian C. Williams / December 10 th, 2003
 Principles of Autonomy and Decision Making Brian C. Williams 16.410/16.413 December 10 th, 2003 1 Outline Objectives Agents and Their Building Blocks Principles for Building Agents: Modeling Formalisms
Principles of Autonomy and Decision Making Brian C. Williams 16.410/16.413 December 10 th, 2003 1 Outline Objectives Agents and Their Building Blocks Principles for Building Agents: Modeling Formalisms
Pannel: SIGNAL 2018 Advances on Sensing Techniques and Signal Processing
 Pannel: SIGNAL 2018 Advances on Sensing Techniques and Signal Processing Moderator : Pr. Wilfried Uhring University of Strasbourg and CNRS Pannel List : Özgür Tamer, Dokuz Eylül Üniversitesi, Turkey Laurent
Pannel: SIGNAL 2018 Advances on Sensing Techniques and Signal Processing Moderator : Pr. Wilfried Uhring University of Strasbourg and CNRS Pannel List : Özgür Tamer, Dokuz Eylül Üniversitesi, Turkey Laurent
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control
 High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
A SURVEY ON GESTURE RECOGNITION TECHNOLOGY
 A SURVEY ON GESTURE RECOGNITION TECHNOLOGY Deeba Kazim 1, Mohd Faisal 2 1 MCA Student, Integral University, Lucknow (India) 2 Assistant Professor, Integral University, Lucknow (india) ABSTRACT Gesture
A SURVEY ON GESTURE RECOGNITION TECHNOLOGY Deeba Kazim 1, Mohd Faisal 2 1 MCA Student, Integral University, Lucknow (India) 2 Assistant Professor, Integral University, Lucknow (india) ABSTRACT Gesture
RoboCupRescue Rescue Robot League Team YRA (IRAN) Islamic Azad University of YAZD, Prof. Hesabi Ave. Safaeie, YAZD,IRAN
 Islamic Azad University of YAZD, Prof. Hesabi Ave. Safaeie, YAZD,IRAN") RoboCupRescue 2014 - Rescue Robot League Team YRA (IRAN) Abolfazl Zare-Shahabadi 1, Seyed Ali Mohammad Mansouri-Tezenji 2 1 Mechanical engineering department Islamic Azad University of YAZD, Prof. Hesabi
RoboCupRescue 2014 - Rescue Robot League Team YRA (IRAN) Abolfazl Zare-Shahabadi 1, Seyed Ali Mohammad Mansouri-Tezenji 2 1 Mechanical engineering department Islamic Azad University of YAZD, Prof. Hesabi
Design a Model and Algorithm for multi Way Gesture Recognition using Motion and Image Comparison
 e-issn 2455 1392 Volume 2 Issue 10, October 2016 pp. 34 41 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com Design a Model and Algorithm for multi Way Gesture Recognition using Motion and
e-issn 2455 1392 Volume 2 Issue 10, October 2016 pp. 34 41 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com Design a Model and Algorithm for multi Way Gesture Recognition using Motion and
Autonomous Face Recognition
 Autonomous Face Recognition CymbIoT Autonomous Face Recognition SECURITYI URBAN SOLUTIONSI RETAIL In recent years, face recognition technology has emerged as a powerful tool for law enforcement and on-site
Autonomous Face Recognition CymbIoT Autonomous Face Recognition SECURITYI URBAN SOLUTIONSI RETAIL In recent years, face recognition technology has emerged as a powerful tool for law enforcement and on-site
RB-Ais-01. Aisoy1 Programmable Interactive Robotic Companion. Renewed and funny dialogs
 RB-Ais-01 Aisoy1 Programmable Interactive Robotic Companion Renewed and funny dialogs Aisoy1 II s behavior has evolved to a more proactive interaction. It has refined its sense of humor and tries to express
RB-Ais-01 Aisoy1 Programmable Interactive Robotic Companion Renewed and funny dialogs Aisoy1 II s behavior has evolved to a more proactive interaction. It has refined its sense of humor and tries to express
Simulation of a mobile robot navigation system
 Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
ARTIFICIAL ROBOT NAVIGATION BASED ON GESTURE AND SPEECH RECOGNITION
 ARTIFICIAL ROBOT NAVIGATION BASED ON GESTURE AND SPEECH RECOGNITION ABSTRACT *Miss. Kadam Vaishnavi Chandrakumar, ** Prof. Hatte Jyoti Subhash *Research Student, M.S.B.Engineering College, Latur, India
ARTIFICIAL ROBOT NAVIGATION BASED ON GESTURE AND SPEECH RECOGNITION ABSTRACT *Miss. Kadam Vaishnavi Chandrakumar, ** Prof. Hatte Jyoti Subhash *Research Student, M.S.B.Engineering College, Latur, India
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
ES 492: SCIENCE IN THE MOVIES
 UNIVERSITY OF SOUTH ALABAMA ES 492: SCIENCE IN THE MOVIES LECTURE 5: ROBOTICS AND AI PRESENTER: HANNAH BECTON TODAY'S AGENDA 1. Robotics and Real-Time Systems 2. Reacting to the environment around them
UNIVERSITY OF SOUTH ALABAMA ES 492: SCIENCE IN THE MOVIES LECTURE 5: ROBOTICS AND AI PRESENTER: HANNAH BECTON TODAY'S AGENDA 1. Robotics and Real-Time Systems 2. Reacting to the environment around them
BODILY NON-VERBAL INTERACTION WITH VIRTUAL CHARACTERS
 KEER2010, PARIS MARCH 2-4 2010 INTERNATIONAL CONFERENCE ON KANSEI ENGINEERING AND EMOTION RESEARCH 2010 BODILY NON-VERBAL INTERACTION WITH VIRTUAL CHARACTERS Marco GILLIES *a a Department of Computing,
KEER2010, PARIS MARCH 2-4 2010 INTERNATIONAL CONFERENCE ON KANSEI ENGINEERING AND EMOTION RESEARCH 2010 BODILY NON-VERBAL INTERACTION WITH VIRTUAL CHARACTERS Marco GILLIES *a a Department of Computing,
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
An Autonomous Tour-Guide Robot for Public Places
 An Autonomous Tour-Guide Robot for Public Places JESÚS SALIDO, VICENTE FELIÚ, ANTONIO ADÁN, LUIS SÁNCHEZ, JOSÉ A. SOMOLINOS & PEDRO L. RONCERO Dpt. of Automatic Control and Systems Engineering (ISA) Castilla-La
An Autonomous Tour-Guide Robot for Public Places JESÚS SALIDO, VICENTE FELIÚ, ANTONIO ADÁN, LUIS SÁNCHEZ, JOSÉ A. SOMOLINOS & PEDRO L. RONCERO Dpt. of Automatic Control and Systems Engineering (ISA) Castilla-La
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
KINECT HANDS-FREE. Rituj Beniwal. Department of Electrical Engineering Indian Institute of Technology, Kanpur. Pranjal Giri
 KINECT HANDS-FREE Rituj Beniwal Pranjal Giri Agrim Bari Raman Pratap Singh Akash Jain Department of Aerospace Engineering Indian Institute of Technology, Kanpur Atharva Mulmuley Department of Chemical
KINECT HANDS-FREE Rituj Beniwal Pranjal Giri Agrim Bari Raman Pratap Singh Akash Jain Department of Aerospace Engineering Indian Institute of Technology, Kanpur Atharva Mulmuley Department of Chemical
The 2012 Team Description
 The Reem@IRI 2012 Robocup@Home Team Description G. Alenyà 1 and R. Tellez 2 1 Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Llorens i Artigas 4-6, 08028 Barcelona, Spain 2 PAL Robotics, C/Pujades
The Reem@IRI 2012 Robocup@Home Team Description G. Alenyà 1 and R. Tellez 2 1 Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Llorens i Artigas 4-6, 08028 Barcelona, Spain 2 PAL Robotics, C/Pujades
interactive laboratory
 interactive laboratory ABOUT US 360 The first in Kazakhstan, who started working with VR technologies Over 3 years of experience in the area of virtual reality Completed 7 large innovative projects 12
interactive laboratory ABOUT US 360 The first in Kazakhstan, who started working with VR technologies Over 3 years of experience in the area of virtual reality Completed 7 large innovative projects 12
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
A*STAR Unveils Singapore s First Social Robots at Robocup2010
 MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Prof. Subramanian Ramamoorthy. The University of Edinburgh, Reader at the School of Informatics
 Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist