GPU Computing for Cognitive Robotics
|
|
|
- Laureen Pope
- 6 years ago
- Views:
Transcription
1 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014
2 Acknowledgements This study was financed by: EU Integrating Projects - ITALK and Poeticon++ within the FP7 ICT programme Cognitive Systems and Robotics ARIADNA scheme of The European Space Agency Thanks to my supervisors Prof Angelo Cangelosi, Dr. Davide Marocco and Prof Tony Belpaeme for their support Thanks to Calisa Cole and Chandra Cheij from NVIDIA for their help


3 New position at Cortexica Imperial College London Leading provider of visual search and image recognition technology for mobile device Creators of a bio-inspired vision system enabling intelligent image recognition using principles derived from the human sight
4 Overview Action and language acquisition in humanoid robots Biologically-inspired Active Vision system Software development 4




5
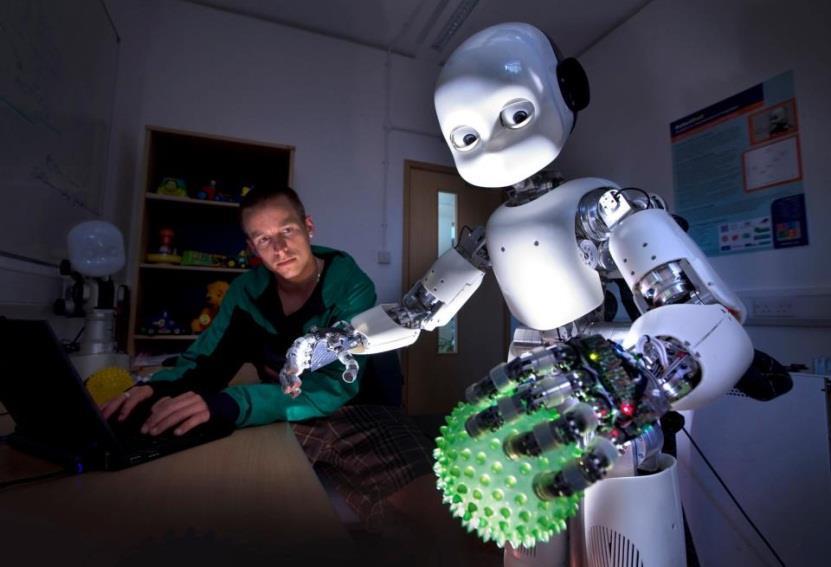
6 Action and Language Acquisition in Humanoid Robots 6
7 Learning Actions Humans are good at learning complex actions Constant repetition of movements with certain components segmented as reusable elements Motor primitives are flexibly combined into novel sequences of actions Human motor control system known to have motor primitives implemented as low as at the spinal cord and hi-level planning and execution takes place in primary motor cortex 7
8 Explicit hierarchical structure vs multiple timescales 8

9 9
 Update rate: 50ms 10")
10 Initial testing of two actions Experimental Setup SOM and MTRNN trained on 2 sequences each repeated 5x with different positions Extended version of up to 9 action sequences Left and Right hand used individually MTRNN input: head, torso and arms (41 DOF) Update rate: 50ms 10
11 Multiple Time-scales Recurrent Neural Network Experiment on action-language grounding step 1 Proprioceptive Input Action 1 Action 2 Action 3 Object 1 trained Visual Input MTRNN Object 2 trained Object 3 trained Linguistic Input 11
12 Results 20 trials conducted and each reached the threshold error of
13 Multiple Time-scales Recurrent Neural Network Scaling up the experiment on action-language grounding Action 1 Action 2 Action 3 Action 4 Action 5 Action 6 Action N Object 1 trained trained trained trained trained trained trained Object 2 trained trained trained trained trained trained trained Object 3 trained trained trained trained trained trained trained Object 4 trained trained trained trained trained trained trained Object 5 trained trained trained trained untrained trained trained Object 6 trained trained trained trained trained untrained trained Object N trained trained trained trained trained trained untrained 13

14 Multiple Time-scales Recurrent Neural Network Generalisation testing Experimental Setup For each of the 9 objects, SOM and MTRNN was trained on 9 sequences each repeated 6x with different positions. Total of 478 sequences each with wide vectors. Left and Right hand used individually MTRNN input: head, torso and arms (41 DOF) Update rate: 50ms 14

15 Self-organising maps CPU vs GPU Performance
16 Multiple Time-scales Recurrent Neural Network CPU vs GPU Performance
17 Biologically-inspired Active Vision system

18 Traditional Computer Vision Teaching a computer to classify objects has proved much harder than was originally anticipated Thomas Serre - Center for Biological and Computational Learning at MIT Specific template or computational representation is required to allow object recognition Must be flexible enough to account with all kinds of variations 18

19 Biological Vision Researchers have been interested for years in trying to copy biological vision systems, simply because they are so good ~ David Hogg - computer vision expert at Leeds University, UK Highly optimized over millions of years of evolution, developing complex neural structures to represent and process stimuli Superiority of biological vision systems is only partially understood Hardware architecture and the style of computation in nervous systems are fundamentally different 19


20 Biological Vision 20
21 Seeing is a way of acting 21
22 Active Vision Inspired by the vision systems of natural organisms that have been evolving for millions of years In contrast to standard computer vision systems, biological organisms actively interact with the world in order to make sense of it Humans and also other animals do not look at a scene in fixed steadiness. Instead, they actively explore interesting parts of the scene by rapid saccadic movements 22
23 Creating Active Vision Systems Evolutionary Robotics Approach 23

24 Evolutionary Robotics New technique for the automatic creation of autonomous robots Inspired by the Darwinian principle of selective reproduction of the fittest Views robots as autonomous artificial organisms that develop their own skills in close interaction with the environment and without human intervention Drawing heavily on biology and ethology, it uses the tools of neural networks, genetic algorithms, dynamic systems, and biomorphic engineering 24
.")
25 ... Genetic Algorithms (GAs) are adaptive heuristic search algorithm premised on the evolutionary ideas of natural selection and genetic. The basic concept of GAs is designed to simulate processes in natural system necessary for evolution. Population (Chromosomes) Genetic operators Evaluation (Fitness) Artificial neural networks (ANNs) are very powerful brain-inspired computational models, which have been used in many different areas such as engineering, medicine, finance, and many others. Selection (Mating Pool) 25



26 Related Research Mars Rover obstacle avoidance (Peniak et al.) 26
 provides a color image collection of one-thousand small objects recorded for scientific purposes systematically varied viewing angle,")

27 Method Evolution of the active vision system for real-world object recognition training the system in a parallel manner on multiple objects viewed from many different angles and under different lighting conditions Amsterdam Library of Object Images (ALOI) provides a color image collection of one-thousand small objects recorded for scientific purposes systematically varied viewing angle, illumination angle, and illumination color Active Vision Training trained on a set of objects from the ALOI library each genotype is evaluated during multiple trials with different randomly rotated objects and under varying lighting conditions evolutionary pressure provided by a fitness function that evaluates overall success or failure of the object classification trained on increasingly larger number of objects Active Vision Testing robustness and resiliency of recognition of the dataset generalization to previously unseen instances of the learned objects 27
28 Experimental Setup Recurrent Neural Network Inputs: 8x8 neurons for retina, 2 neurons for proprioception (x,y pos) No hidden neurons Outputs: 5 object recognition neurons, 2 neurons to move retina (16px max) Genetic Algorithm Generations: Number of individuals: 100 Number of trials: (object rotations + varying lighting conditions) Mutation probability: 10% Reproduction: best 20% of individuals create new population Elitism used (best individual is preserved) 28
29 Experimental Setup Each individual (neural network) could freely move the retina and read the input from the source image (128x128) for 20 steps At each step, neural network controlled the behavior of the system (retina position) and provide recognition output The recognition output neuron with the highest activation was considered the network s guess about what the object was Fitness function = number of correct answers / number of total steps 29
30 GPU Accelerating GA and ANN GPUs were used to accelerate: Evolutionary process parallel execution of trials Neural Network parallel calculation of neural activities 30
31 fitness Results Fitness can not reach 1.0 since it takes few time-steps to recognize an object All objects are correctly classified at the end of the each test generations best fitness average fitness 31

32 Evolved Behavior 32
33 Software development



34 Heterogeneous computing Device Application Code Host GPU Compute-Intensive Functions Use GPU to Parallelise Rest of Sequential CPU Code CPU +
35 What is Aquila? Heterogeneous software architecture for the development of modules loosely coupled to their graphical user interfaces Provides simple and user friendly GUI client Distribute, control and visualise existing modules Generate new modules Monitor connected server Tools Modules Run heterogeneous CPU-GPU code doing the actual work



36 What is Aquila? Developed in C++ and CUDA Cross-platform Linux OSX Windows Dependencies Qt YARP CUDA





37 YARP messages CPU GPU Other modules YARP messages Aquila GUI Aquila Module GUI in Tab 1 Aquila Module Main Thread modulename.cpp Module GUI Implementation modulename.cpp Module GUI Design modulename.ui Tab 1 Name: modulename Instance: instanceid Server: serverid YARP Interface Interface.cpp YARP Interface modulenameinterface.cpp GPU Kernels kernels.cu Module Settings GUI Implementation modulenamesettings.cpp Module Settings GUI Design modulenamesettings.ui Tab 2 Tab N YARP messages





38 Speed-up Existing Aquila Ecosystem MTRNN Multiple Time-scales Recurrent Neural Network MTRNN Benchmark Example 2xGTX580(P2P) vs 8 core Intel Xeon Neurons SOM Self-organising Map ERA Epigenetic Robotics Architecture Tracker Object tracking ESN Echo State Networks


39 "Imagination is the highest form of research" Albert Einstein Thank you! 39
A Divide-and-Conquer Approach to Evolvable Hardware
 A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Biologically Inspired Embodied Evolution of Survival
 Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Evolutions of communication
 Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Evolution in Robotic Islands
 Evolution in Robotic Islands Optimising the design of autonomous robot controllers for navigation and exploration of unknown environments Final Report Authors: Angelo Cangelosi (1), Davide Marocco (1),
Evolution in Robotic Islands Optimising the design of autonomous robot controllers for navigation and exploration of unknown environments Final Report Authors: Angelo Cangelosi (1), Davide Marocco (1),
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Behavior-based robotics, and Evolutionary robotics
 Behavior-based robotics, and Evolutionary robotics Lecture 7 2008-02-12 Contents Part I: Behavior-based robotics: Generating robot behaviors. MW p. 39-52. Part II: Evolutionary robotics: Evolving basic
Behavior-based robotics, and Evolutionary robotics Lecture 7 2008-02-12 Contents Part I: Behavior-based robotics: Generating robot behaviors. MW p. 39-52. Part II: Evolutionary robotics: Evolving basic
THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS
 THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS Shanker G R Prabhu*, Richard Seals^ University of Greenwich Dept. of Engineering Science Chatham, Kent, UK, ME4 4TB. +44 (0) 1634 88
THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS Shanker G R Prabhu*, Richard Seals^ University of Greenwich Dept. of Engineering Science Chatham, Kent, UK, ME4 4TB. +44 (0) 1634 88
The Behavior Evolving Model and Application of Virtual Robots
 The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems
 A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
MINE 432 Industrial Automation and Robotics
 MINE 432 Industrial Automation and Robotics Part 3, Lecture 5 Overview of Artificial Neural Networks A. Farzanegan (Visiting Associate Professor) Fall 2014 Norman B. Keevil Institute of Mining Engineering
MINE 432 Industrial Automation and Robotics Part 3, Lecture 5 Overview of Artificial Neural Networks A. Farzanegan (Visiting Associate Professor) Fall 2014 Norman B. Keevil Institute of Mining Engineering
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks
 Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
CUDA-Accelerated Satellite Communication Demodulation
 CUDA-Accelerated Satellite Communication Demodulation Renliang Zhao, Ying Liu, Liheng Jian, Zhongya Wang School of Computer and Control University of Chinese Academy of Sciences Outline Motivation Related
CUDA-Accelerated Satellite Communication Demodulation Renliang Zhao, Ying Liu, Liheng Jian, Zhongya Wang School of Computer and Control University of Chinese Academy of Sciences Outline Motivation Related
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Embodiment from Engineer s Point of View
 New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Knowledge Representation and Reasoning
 Master of Science in Artificial Intelligence, 2012-2014 Knowledge Representation and Reasoning University "Politehnica" of Bucharest Department of Computer Science Fall 2012 Adina Magda Florea The AI Debate
Master of Science in Artificial Intelligence, 2012-2014 Knowledge Representation and Reasoning University "Politehnica" of Bucharest Department of Computer Science Fall 2012 Adina Magda Florea The AI Debate
ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS
 ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS Prof.Somashekara Reddy 1, Kusuma S 2 1 Department of MCA, NHCE Bangalore, India 2 Kusuma S, Department of MCA, NHCE Bangalore, India Abstract: Artificial Intelligence
ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS Prof.Somashekara Reddy 1, Kusuma S 2 1 Department of MCA, NHCE Bangalore, India 2 Kusuma S, Department of MCA, NHCE Bangalore, India Abstract: Artificial Intelligence
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Available online at ScienceDirect. Procedia Computer Science 24 (2013 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Synthetic Brains: Update
 Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
Enhancing Embodied Evolution with Punctuated Anytime Learning
 Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Humanification Go Digital, Stay Human
 Humanification Go Digital, Stay Human Image courtesy: Home LOCAL AND PREDICTABLE WORLD GLOBAL AND UNPREDICTABLE WORLD MASSIVE DISRUPTION IN THE NEXT DECADE DISRUPTIVE STRESS OR DISRUPTIVE OPPORTUNITY DISRUPTION
Humanification Go Digital, Stay Human Image courtesy: Home LOCAL AND PREDICTABLE WORLD GLOBAL AND UNPREDICTABLE WORLD MASSIVE DISRUPTION IN THE NEXT DECADE DISRUPTIVE STRESS OR DISRUPTIVE OPPORTUNITY DISRUPTION
SenseMaker IST Martin McGinnity University of Ulster Neuro-IT, Bonn, June 2004 SenseMaker IST Neuro-IT workshop June 2004 Page 1
 SenseMaker IST2001-34712 Martin McGinnity University of Ulster Neuro-IT, Bonn, June 2004 Page 1 Project Objectives To design and implement an intelligent computational system, drawing inspiration from
SenseMaker IST2001-34712 Martin McGinnity University of Ulster Neuro-IT, Bonn, June 2004 Page 1 Project Objectives To design and implement an intelligent computational system, drawing inspiration from
Mobile robot control based on noninvasive brain-computer interface using hierarchical classifier of imagined motor commands
 Mobile robot control based on noninvasive brain-computer interface using hierarchical classifier of imagined motor commands Filipp Gundelakh 1, Lev Stankevich 1, * and Konstantin Sonkin 2 1 Peter the Great
Mobile robot control based on noninvasive brain-computer interface using hierarchical classifier of imagined motor commands Filipp Gundelakh 1, Lev Stankevich 1, * and Konstantin Sonkin 2 1 Peter the Great
GPU ACCELERATED DEEP LEARNING WITH CUDNN
 GPU ACCELERATED DEEP LEARNING WITH CUDNN Larry Brown Ph.D. March 2015 AGENDA 1 Introducing cudnn and GPUs 2 Deep Learning Context 3 cudnn V2 4 Using cudnn 2 Introducing cudnn and GPUs 3 HOW GPU ACCELERATION
GPU ACCELERATED DEEP LEARNING WITH CUDNN Larry Brown Ph.D. March 2015 AGENDA 1 Introducing cudnn and GPUs 2 Deep Learning Context 3 cudnn V2 4 Using cudnn 2 Introducing cudnn and GPUs 3 HOW GPU ACCELERATION
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
Swiss Re Institute. September 2018 Dr. Jeffrey R. Bohn
 Swiss Re Institute September 2018 Dr. Jeffrey R. Bohn Welcome & Introduction to the Swiss Re Institute 2 Global presence US infrastructure SRI Symposia sigma Monte Carlo launch Insurance market report
Swiss Re Institute September 2018 Dr. Jeffrey R. Bohn Welcome & Introduction to the Swiss Re Institute 2 Global presence US infrastructure SRI Symposia sigma Monte Carlo launch Insurance market report
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Challenges in Transition
 Challenges in Transition Keynote talk at International Workshop on Software Engineering Methods for Parallel and High Performance Applications (SEM4HPC 2016) 1 Kazuaki Ishizaki IBM Research Tokyo kiszk@acm.org
Challenges in Transition Keynote talk at International Workshop on Software Engineering Methods for Parallel and High Performance Applications (SEM4HPC 2016) 1 Kazuaki Ishizaki IBM Research Tokyo kiszk@acm.org
Contents 1 Introduction Optical Character Recognition Systems Soft Computing Techniques for Optical Character Recognition Systems
 Contents 1 Introduction.... 1 1.1 Organization of the Monograph.... 1 1.2 Notation.... 3 1.3 State of Art.... 4 1.4 Research Issues and Challenges.... 5 1.5 Figures.... 5 1.6 MATLAB OCR Toolbox.... 5 References....
Contents 1 Introduction.... 1 1.1 Organization of the Monograph.... 1 1.2 Notation.... 3 1.3 State of Art.... 4 1.4 Research Issues and Challenges.... 5 1.5 Figures.... 5 1.6 MATLAB OCR Toolbox.... 5 References....
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Artificial Neural Networks. Artificial Intelligence Santa Clara, 2016
 Artificial Neural Networks Artificial Intelligence Santa Clara, 2016 Simulate the functioning of the brain Can simulate actual neurons: Computational neuroscience Can introduce simplified neurons: Neural
Artificial Neural Networks Artificial Intelligence Santa Clara, 2016 Simulate the functioning of the brain Can simulate actual neurons: Computational neuroscience Can introduce simplified neurons: Neural
Ben Baker. Sponsored by:
 Ben Baker Sponsored by: Background Agenda GPU Computing Digital Image Processing at FamilySearch Potential GPU based solutions Performance Testing Results Conclusions and Future Work 2 CPU vs. GPU Architecture
Ben Baker Sponsored by: Background Agenda GPU Computing Digital Image Processing at FamilySearch Potential GPU based solutions Performance Testing Results Conclusions and Future Work 2 CPU vs. GPU Architecture
Computational Efficiency of the GF and the RMF Transforms for Quaternary Logic Functions on CPUs and GPUs
 5 th International Conference on Logic and Application LAP 2016 Dubrovnik, Croatia, September 19-23, 2016 Computational Efficiency of the GF and the RMF Transforms for Quaternary Logic Functions on CPUs
5 th International Conference on Logic and Application LAP 2016 Dubrovnik, Croatia, September 19-23, 2016 Computational Efficiency of the GF and the RMF Transforms for Quaternary Logic Functions on CPUs
Eyedentify MMR SDK. Technical sheet. Version Eyedea Recognition, s.r.o.
 Eyedentify MMR SDK Technical sheet Version 2.3.1 010001010111100101100101011001000110010101100001001000000 101001001100101011000110110111101100111011011100110100101 110100011010010110111101101110010001010111100101100101011
Eyedentify MMR SDK Technical sheet Version 2.3.1 010001010111100101100101011001000110010101100001001000000 101001001100101011000110110111101100111011011100110100101 110100011010010110111101101110010001010111100101100101011
Proposers Day Workshop
 Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC)
 and Soft Computing (SC)") Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Co-evolution for Communication: An EHW Approach
 Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Evolutionary Computation and Machine Intelligence
 Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
AI MAGAZINE AMER ASSOC ARTIFICIAL INTELL UNITED STATES English ANNALS OF MATHEMATICS AND ARTIFICIAL
 Title Publisher ISSN Country Language ACM Transactions on Autonomous and Adaptive Systems ASSOC COMPUTING MACHINERY 1556-4665 UNITED STATES English ACM Transactions on Intelligent Systems and Technology
Title Publisher ISSN Country Language ACM Transactions on Autonomous and Adaptive Systems ASSOC COMPUTING MACHINERY 1556-4665 UNITED STATES English ACM Transactions on Intelligent Systems and Technology
Transactions on Information and Communications Technologies vol 1, 1993 WIT Press, ISSN
 Combining multi-layer perceptrons with heuristics for reliable control chart pattern classification D.T. Pham & E. Oztemel Intelligent Systems Research Laboratory, School of Electrical, Electronic and
Combining multi-layer perceptrons with heuristics for reliable control chart pattern classification D.T. Pham & E. Oztemel Intelligent Systems Research Laboratory, School of Electrical, Electronic and
AI Frontiers. Dr. Dario Gil Vice President IBM Research
 AI Frontiers Dr. Dario Gil Vice President IBM Research 1 AI is the new IT MIT Intro to Machine Learning course: 2013 138 students 2016 302 students 2017 700 students 2 What is AI? Artificial Intelligence
AI Frontiers Dr. Dario Gil Vice President IBM Research 1 AI is the new IT MIT Intro to Machine Learning course: 2013 138 students 2016 302 students 2017 700 students 2 What is AI? Artificial Intelligence
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Optimization of Tile Sets for DNA Self- Assembly
 Optimization of Tile Sets for DNA Self- Assembly Joel Gawarecki Department of Computer Science Simpson College Indianola, IA 50125 joel.gawarecki@my.simpson.edu Adam Smith Department of Computer Science
Optimization of Tile Sets for DNA Self- Assembly Joel Gawarecki Department of Computer Science Simpson College Indianola, IA 50125 joel.gawarecki@my.simpson.edu Adam Smith Department of Computer Science
Motion Recognition in Wearable Sensor System Using an Ensemble Artificial Neuro-Molecular System
 Motion Recognition in Wearable Sensor System Using an Ensemble Artificial Neuro-Molecular System Si-Jung Ryu and Jong-Hwan Kim Department of Electrical Engineering, KAIST, 355 Gwahangno, Yuseong-gu, Daejeon,
Motion Recognition in Wearable Sensor System Using an Ensemble Artificial Neuro-Molecular System Si-Jung Ryu and Jong-Hwan Kim Department of Electrical Engineering, KAIST, 355 Gwahangno, Yuseong-gu, Daejeon,
GPU-accelerated SDR Implementation of Multi-User Detector for Satellite Return Links
 DLR.de Chart 1 GPU-accelerated SDR Implementation of Multi-User Detector for Satellite Return Links Chen Tang chen.tang@dlr.de Institute of Communication and Navigation German Aerospace Center DLR.de Chart
DLR.de Chart 1 GPU-accelerated SDR Implementation of Multi-User Detector for Satellite Return Links Chen Tang chen.tang@dlr.de Institute of Communication and Navigation German Aerospace Center DLR.de Chart
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
Breedbot: An Edutainment Robotics System to Link Digital and Real World
 Breedbot: An Edutainment Robotics System to Link Digital and Real World Orazio Miglino 1,2, Onofrio Gigliotta 2,3, Michela Ponticorvo 1, and Stefano Nolfi 2 1 Department of Relational Sciences G.Iacono,
Breedbot: An Edutainment Robotics System to Link Digital and Real World Orazio Miglino 1,2, Onofrio Gigliotta 2,3, Michela Ponticorvo 1, and Stefano Nolfi 2 1 Department of Relational Sciences G.Iacono,
Haptic Rendering of Large-Scale VEs
 Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Night-time pedestrian detection via Neuromorphic approach
 Night-time pedestrian detection via Neuromorphic approach WOO JOON HAN, IL SONG HAN Graduate School for Green Transportation Korea Advanced Institute of Science and Technology 335 Gwahak-ro, Yuseong-gu,
Night-time pedestrian detection via Neuromorphic approach WOO JOON HAN, IL SONG HAN Graduate School for Green Transportation Korea Advanced Institute of Science and Technology 335 Gwahak-ro, Yuseong-gu,
Neural Network Application in Robotics
 Neural Network Application in Robotics Development of Autonomous Aero-Robot and its Applications to Safety and Disaster Prevention with the help of neural network Sharique Hayat 1, R. N. Mall 2 1. M.Tech.
Neural Network Application in Robotics Development of Autonomous Aero-Robot and its Applications to Safety and Disaster Prevention with the help of neural network Sharique Hayat 1, R. N. Mall 2 1. M.Tech.
SMARTER NEAT NETS. A Thesis. presented to. the Faculty of California Polytechnic State University. San Luis Obispo. In Partial Fulfillment
 SMARTER NEAT NETS A Thesis presented to the Faculty of California Polytechnic State University San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science
SMARTER NEAT NETS A Thesis presented to the Faculty of California Polytechnic State University San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science
Demystifying Machine Learning
 Demystifying Machine Learning By Simon Agius Muscat Software Engineer with RightBrain PyMalta, 19/07/18 http://www.rightbrain.com.mt 0. Talk outline 1. Explain the reasoning behind my talk 2. Defining
Demystifying Machine Learning By Simon Agius Muscat Software Engineer with RightBrain PyMalta, 19/07/18 http://www.rightbrain.com.mt 0. Talk outline 1. Explain the reasoning behind my talk 2. Defining
GENETIC PROGRAMMING. In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased
 is an evolutionary algorithmbased") GENETIC PROGRAMMING Definition In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased methodology inspired by biological evolution to find computer programs that perform
GENETIC PROGRAMMING Definition In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased methodology inspired by biological evolution to find computer programs that perform
Genetic Robots Play Football. William Jeggo BSc Computing
 Genetic Robots Play Football William Jeggo BSc Computing 2003-2004 The candidate confirms that the work submitted is their own and the appropriate credit has been given where reference has been made to
Genetic Robots Play Football William Jeggo BSc Computing 2003-2004 The candidate confirms that the work submitted is their own and the appropriate credit has been given where reference has been made to
Confidence-Based Multi-Robot Learning from Demonstration
 Int J Soc Robot (2010) 2: 195 215 DOI 10.1007/s12369-010-0060-0 Confidence-Based Multi-Robot Learning from Demonstration Sonia Chernova Manuela Veloso Accepted: 5 May 2010 / Published online: 19 May 2010
Int J Soc Robot (2010) 2: 195 215 DOI 10.1007/s12369-010-0060-0 Confidence-Based Multi-Robot Learning from Demonstration Sonia Chernova Manuela Veloso Accepted: 5 May 2010 / Published online: 19 May 2010
Biologically Inspired Computation
 Biologically Inspired Computation Deep Learning & Convolutional Neural Networks Joe Marino biologically inspired computation biological intelligence flexible capable of detecting/ executing/reasoning about
Biologically Inspired Computation Deep Learning & Convolutional Neural Networks Joe Marino biologically inspired computation biological intelligence flexible capable of detecting/ executing/reasoning about
NEURAL NETWORK DEMODULATOR FOR QUADRATURE AMPLITUDE MODULATION (QAM)
") NEURAL NETWORK DEMODULATOR FOR QUADRATURE AMPLITUDE MODULATION (QAM) Ahmed Nasraden Milad M. Aziz M Rahmadwati Artificial neural network (ANN) is one of the most advanced technology fields, which allows
NEURAL NETWORK DEMODULATOR FOR QUADRATURE AMPLITUDE MODULATION (QAM) Ahmed Nasraden Milad M. Aziz M Rahmadwati Artificial neural network (ANN) is one of the most advanced technology fields, which allows
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Neural Networks for Real-time Pathfinding in Computer Games
 Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Artificial intelligence, made simple. Written by: Dale Benton Produced by: Danielle Harris
 Artificial intelligence, made simple Written by: Dale Benton Produced by: Danielle Harris THE ARTIFICIAL INTELLIGENCE MARKET IS SET TO EXPLODE AND NVIDIA, ALONG WITH THE TECHNOLOGY ECOSYSTEM INCLUDING
Artificial intelligence, made simple Written by: Dale Benton Produced by: Danielle Harris THE ARTIFICIAL INTELLIGENCE MARKET IS SET TO EXPLODE AND NVIDIA, ALONG WITH THE TECHNOLOGY ECOSYSTEM INCLUDING
258 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
 258 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003 Genetic Design of Biologically Inspired Receptive Fields for Neural Pattern Recognition Claudio A.
258 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003 Genetic Design of Biologically Inspired Receptive Fields for Neural Pattern Recognition Claudio A.
PES: A system for parallelized fitness evaluation of evolutionary methods
 PES: A system for parallelized fitness evaluation of evolutionary methods Onur Soysal, Erkin Bahçeci, and Erol Şahin Department of Computer Engineering Middle East Technical University 06531 Ankara, Turkey
PES: A system for parallelized fitness evaluation of evolutionary methods Onur Soysal, Erkin Bahçeci, and Erol Şahin Department of Computer Engineering Middle East Technical University 06531 Ankara, Turkey
Evolutionary Artificial Neural Networks For Medical Data Classification
 Evolutionary Artificial Neural Networks For Medical Data Classification GRADUATE PROJECT Submitted to the Faculty of the Department of Computing Sciences Texas A&M University-Corpus Christi Corpus Christi,
Evolutionary Artificial Neural Networks For Medical Data Classification GRADUATE PROJECT Submitted to the Faculty of the Department of Computing Sciences Texas A&M University-Corpus Christi Corpus Christi,
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN?
 KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
Development of an Intelligent Agent based Manufacturing System
 Development of an Intelligent Agent based Manufacturing System Hong-Seok Park 1 and Ngoc-Hien Tran 2 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan 680-749, South Korea 2
Development of an Intelligent Agent based Manufacturing System Hong-Seok Park 1 and Ngoc-Hien Tran 2 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan 680-749, South Korea 2
Decoding Brainwave Data using Regression
 Decoding Brainwave Data using Regression Justin Kilmarx: The University of Tennessee, Knoxville David Saffo: Loyola University Chicago Lucien Ng: The Chinese University of Hong Kong Mentor: Dr. Xiaopeng
Decoding Brainwave Data using Regression Justin Kilmarx: The University of Tennessee, Knoxville David Saffo: Loyola University Chicago Lucien Ng: The Chinese University of Hong Kong Mentor: Dr. Xiaopeng
FACE RECOGNITION USING NEURAL NETWORKS
 Int. J. Elec&Electr.Eng&Telecoms. 2014 Vinoda Yaragatti and Bhaskar B, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 2014 IJEETC. All Rights Reserved FACE RECOGNITION USING
Int. J. Elec&Electr.Eng&Telecoms. 2014 Vinoda Yaragatti and Bhaskar B, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 2014 IJEETC. All Rights Reserved FACE RECOGNITION USING
Evolved Neurodynamics for Robot Control
 Evolved Neurodynamics for Robot Control Frank Pasemann, Martin Hülse, Keyan Zahedi Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, D-53754 Sankt Augustin, Germany Abstract
Evolved Neurodynamics for Robot Control Frank Pasemann, Martin Hülse, Keyan Zahedi Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, D-53754 Sankt Augustin, Germany Abstract
Artificial Life Simulation on Distributed Virtual Reality Environments
 Artificial Life Simulation on Distributed Virtual Reality Environments Marcio Lobo Netto, Cláudio Ranieri Laboratório de Sistemas Integráveis Universidade de São Paulo (USP) São Paulo SP Brazil {lobonett,ranieri}@lsi.usp.br
Artificial Life Simulation on Distributed Virtual Reality Environments Marcio Lobo Netto, Cláudio Ranieri Laboratório de Sistemas Integráveis Universidade de São Paulo (USP) São Paulo SP Brazil {lobonett,ranieri}@lsi.usp.br
Hardware Software Science Co-design in the Human Brain Project
 Hardware Software Science Co-design in the Human Brain Project Wouter Klijn 29-11-2016 Pune, India 1 Content The Human Brain Project Hardware - HBP Pilot machines Software - A Neuron - NestMC: NEST Multi
Hardware Software Science Co-design in the Human Brain Project Wouter Klijn 29-11-2016 Pune, India 1 Content The Human Brain Project Hardware - HBP Pilot machines Software - A Neuron - NestMC: NEST Multi
Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers
 using Artificial Neural Network Classifiers") Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers Maitreyee Wairagkar Brain Embodiment Lab, School of Systems Engineering, University of Reading, Reading, U.K.
Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers Maitreyee Wairagkar Brain Embodiment Lab, School of Systems Engineering, University of Reading, Reading, U.K.
신경망기반자동번역기술. Konkuk University Computational Intelligence Lab. 김강일
 신경망기반자동번역기술 Konkuk University Computational Intelligence Lab. http://ci.konkuk.ac.kr kikim01@kunkuk.ac.kr 김강일 Index Issues in AI and Deep Learning Overview of Machine Translation Advanced Techniques in
신경망기반자동번역기술 Konkuk University Computational Intelligence Lab. http://ci.konkuk.ac.kr kikim01@kunkuk.ac.kr 김강일 Index Issues in AI and Deep Learning Overview of Machine Translation Advanced Techniques in
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Live Hand Gesture Recognition using an Android Device
 Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Adaptive Humanoid Robot Arm Motion Generation by Evolved Neural Controllers
 Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Framework Programme 7
 Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
INTELLIGENT CONTROL OF AUTONOMOUS SIX-LEGGED ROBOTS BY NEURAL NETWORKS
 INTELLIGENT CONTROL OF AUTONOMOUS SIX-LEGGED ROBOTS BY NEURAL NETWORKS Prof. Dr. W. Lechner 1 Dipl.-Ing. Frank Müller 2 Fachhochschule Hannover University of Applied Sciences and Arts Computer Science
INTELLIGENT CONTROL OF AUTONOMOUS SIX-LEGGED ROBOTS BY NEURAL NETWORKS Prof. Dr. W. Lechner 1 Dipl.-Ing. Frank Müller 2 Fachhochschule Hannover University of Applied Sciences and Arts Computer Science
Notes from a seminar on "Tackling Public Sector Fraud" presented jointly by the UK NAO and H M Treasury in London, England in February 1998.
 Tackling Public Sector Fraud Notes from a seminar on "Tackling Public Sector Fraud" presented jointly by the UK NAO and H M Treasury in London, England in February 1998. Glenis Bevan audit Manager, Audit
Tackling Public Sector Fraud Notes from a seminar on "Tackling Public Sector Fraud" presented jointly by the UK NAO and H M Treasury in London, England in February 1998. Glenis Bevan audit Manager, Audit
A Review on Genetic Algorithm and Its Applications
 2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Review on Genetic Algorithm and Its Applications Anju Bala Research Scholar, Department
2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Review on Genetic Algorithm and Its Applications Anju Bala Research Scholar, Department
YDDON. Humans, Robots, & Intelligent Objects New communication approaches
 YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
On Intelligence Jeff Hawkins
 On Intelligence Jeff Hawkins Chapter 8: The Future of Intelligence April 27, 2006 Presented by: Melanie Swan, Futurist MS Futures Group 650-681-9482 m@melanieswan.com http://www.melanieswan.com Building
On Intelligence Jeff Hawkins Chapter 8: The Future of Intelligence April 27, 2006 Presented by: Melanie Swan, Futurist MS Futures Group 650-681-9482 m@melanieswan.com http://www.melanieswan.com Building
Human-Centric Trusted AI for Data-Driven Economy
 Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
Designing Toys That Come Alive: Curious Robots for Creative Play
 Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
ALife in the Galapagos: migration effects on neuro-controller design
 ALife in the Galapagos: migration effects on neuro-controller design Christos Ampatzis, Dario Izzo, Marek Ruciński, and Francesco Biscani Advanced Concepts Team, Keplerlaan 1-2201 AZ Noordwijk - The Netherlands
ALife in the Galapagos: migration effects on neuro-controller design Christos Ampatzis, Dario Izzo, Marek Ruciński, and Francesco Biscani Advanced Concepts Team, Keplerlaan 1-2201 AZ Noordwijk - The Netherlands
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.