YDDON. Humans, Robots, & Intelligent Objects New communication approaches
|
|
|
- Reynold Joseph
- 5 years ago
- Views:
Transcription


1 YDDON Humans, Robots, & Intelligent Objects New communication approaches






2 Building Robot intelligence Interdisciplinarity Turning things into robots m Edifício A Moagem Cidade do Engenho e das Artes - Largo da Estação Fundão - Portugal



























3 AI, computer networks, robotics, communications, ubiquity computing
4 We are going to chat about Robotic stuff at MIT Building Robot intelligence and social interaction approaches for robot s learning based on a human teacher Robotic stuff at YDreamsRobotics Bringing pervasive robotics bringing robots into people s life Internet of Things and new paradigms for robots

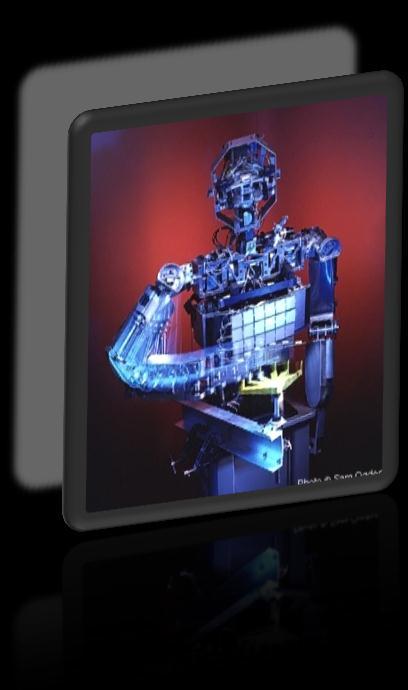
5 Robotic stuff at MIT Source: MIT Cog Humanoid Robot


6 Building Robot intelligence
![Curiosity Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that?](/docs-images/84/89477882/images/7-1.jpg "There's no way. Joey: Well there is one way. His window's open I say, we poke him.")
7 Curiosity Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that? There's no way. Joey: Well there is one way. His window's open I say, we poke him. (brandishes the Giant Poking Device)


8 Curiosity and Explorations



9 But How to Acquire new Knowledge?








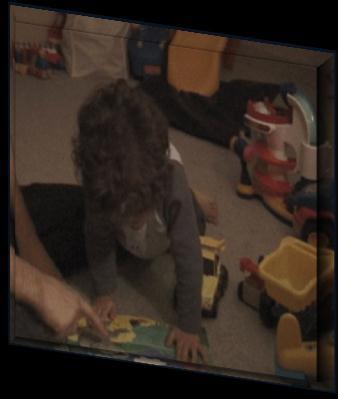


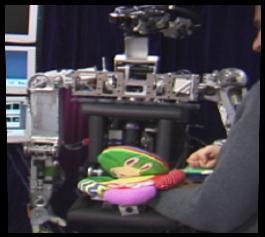
10 Imitate Children using their toys























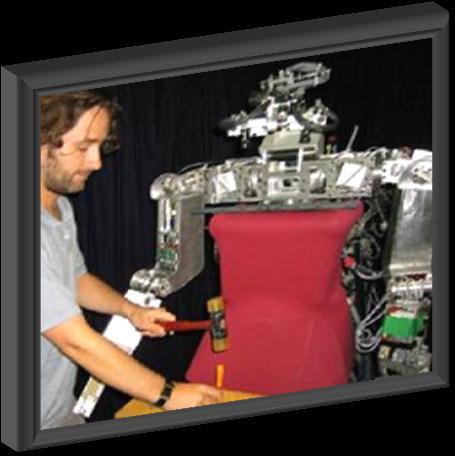
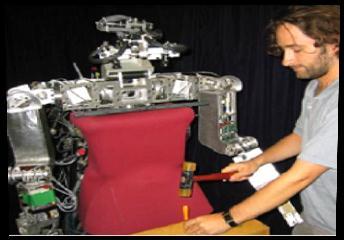
11 Human Caregiver - The Helping Hand






12





13

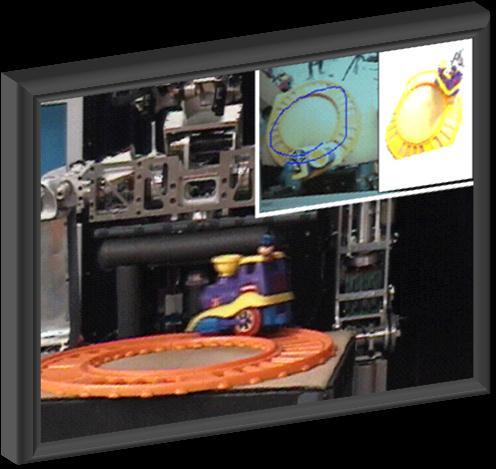
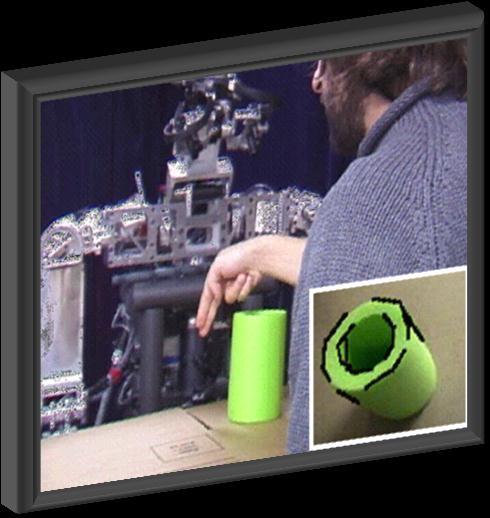
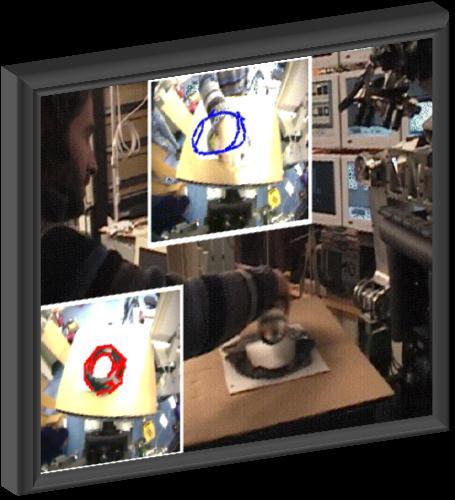
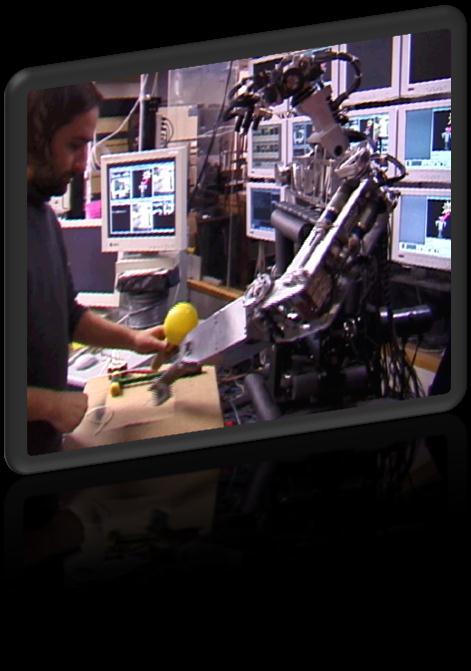
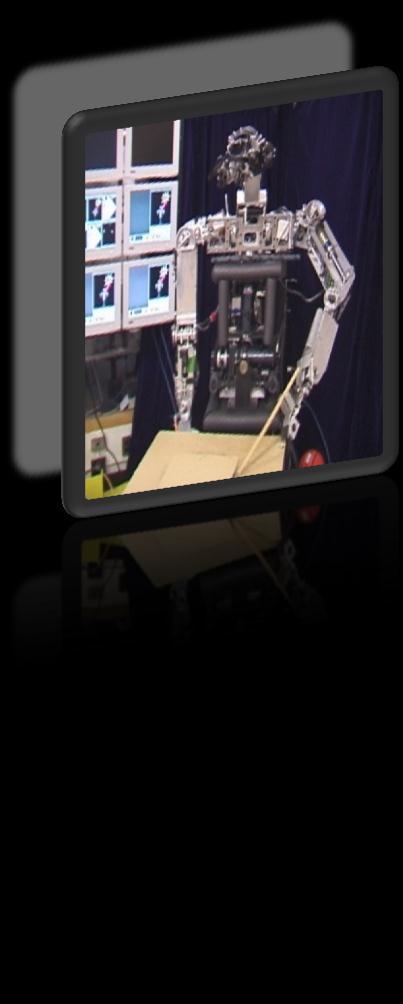
14 Example: Segmentation from Human-Robot Interactions


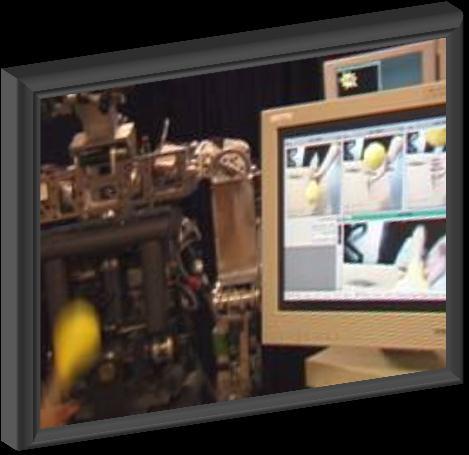
15 Robot Motivation Seek toy search for toy observation: 28% faces, 72% toy Seek face search for faces observation: 80% face, 20% toy Internal status affect the measure of the salient stimulus Robot is not a slave of its environment Robot prefers stimulus which are relevant to its behaviours

16 Negotiating Social Contact Distance

17 Human-Robot Interactions - Learning to estimate

18 Human communication and learning Turn-Taking 4 phases turn cycle Let talk Listening Speak again Speaking Integrates Visual behaviors & attention Facial expression & animation Body postures Vocalization and leaps syncronization



 to the sound they generate")



 to its visual description Mapping a No!")
19 Motor Area Control Processes Sliding-Modes Controller Learning of Locally Affine Dynamic Models Binding multiple features Matsuoka Neural Oscillators for the execution of Rhythmic Movements Primary Visual Association Area Space-variant Attentional System Face and Head pose Detection/Recognition Keeping Track of Multiple Objects Emotional Processes Motivational Drives, Speech emotional content Where pathway Scene recognition Spatial Organization of objects Object-based mixture of gaussians to learn spatial distributions of objects and people relative to the spatial layout of a scene Holistic-based - mixture of gaussians to learn spatial distributions of objects from the spatial distribution of frequencies on an image Sensory-motor maps Locally weight regressions are used to map proprioceptive data from body joints to 3D cartesian space Perception of robot s own body Acoustic Perception Sound recognition (PCA - clusters input space into eigen sounds) Recognizing sounds of objects Word Recognition Frontal Lobe and Motor area Parietal Lobe Binding proprioceptive data from robotic body parts (head, torso, left or right arms and hand) to the sound they generate Binding proprioceptive data from the robot s joints to the robot s body visual appearance Cerebellum Vestibulo-occular reflex Smooth pursuit Saccades Own body kinematics and Dynamics Temporal Lobe Occipital Lobe Right Left hemisphere hemisphere Holistic Based integration Lymbic system Object Based Integr. Learning and Task Identification Identification of tasks using Markov Models e.g. Hammering, sawing, painting, drawing Learning the kinematics and dynamics of mechanical mechanisms Binding Sounds to Visual descriptions bang sound to Hammer visual segmentation acoustic representation of a geometric shape (such as a circle) to its visual description Mapping a No! sound to a head shaking movement Body-retina spatial maps Cerebellum What Pathway object recognition through: integration of shape features integration of Chrominance features integration of luminance features integration of texture descriptors Low-level visual processing - Wavelets computation, Short-time Fourier Transforms, Edge detection (Canny algorithm), Edge orientation (Sobel Masks), Line estimation (Hough transform),topological color areas (8-connectivity labelling) Skin detection, Optical flow estimation (Horn & Schrunk), Point tracking (Lukas and Kanade Pyramidal Alg.)















20 Bringing People into Robot s Life
21 Turning Things into Robots! YD Robotics is guided by the vision of assuming a leading role in the rapidly emerging consumer robotic market, especially in the home robotic segment, with the aim of bringing robots into people s lives. We believe intelligence can be added to everyday objects and appliances allowing for the introduction of new revolutionary products for the end-consumer.

22 Ydreams robotics, WIRED magazine, 2011 Cooperative Robot Swarms

23 Link 237: Service Robot

24 Frog:
25 Multi-Robot Cognitive Systems Operating in Hospitals


26




27 Natural Human-Robot Interfaces





28 Making Robots Pervasive in our Lives NAO. Source:YouTube


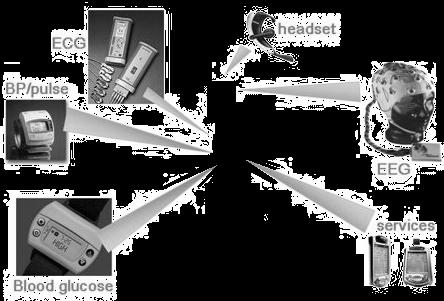














29 Mobile Devices as Edge Gateways



30 Transforming Things into Robots


31 Actuators on Mobile Devices Bayer (Artificial Muscles)

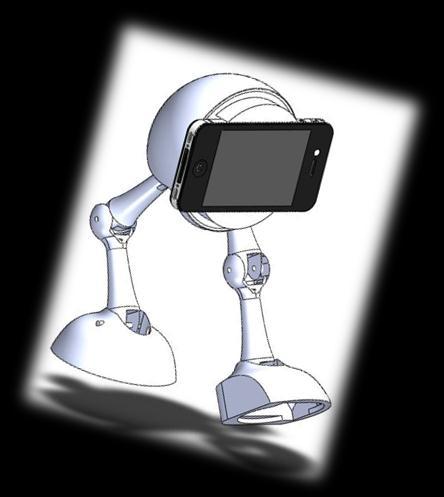
32 Robotic Lamp by YdreamsRobotics

33




34 Things that Move - Augmented functionalities yogo TM

35 Robotic Shelves
36 Ziphius by Ydreams Azorean



37 Invisible Networks



38 Diverse Materials Metals Aluminium Plastics ABS, thermoplastics, fiber glass Silicone Gels Biological Material Living Beings Ex. Remotely operated cockroach
39 Human muscle inspired Actuators Electroactive Polymers (EAPs)

40 Smart Materials Shape Memory Alloys


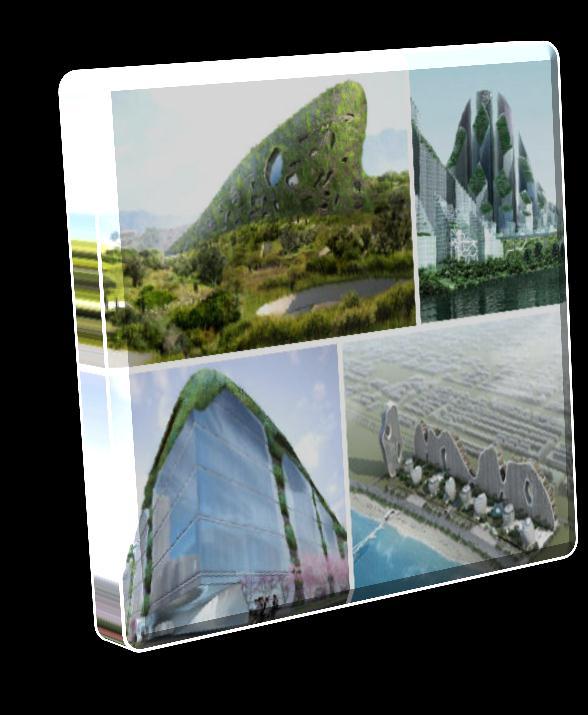
41 Grow your house vs Build it







42 Convergence of Technologies















43 Turning Things into Robots Bringing Robots into People s Life
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Perception and Perspective in Robotics
 Perception and Perspective in Robotics Paul Fitzpatrick MIT CSAIL USA experimentation helps perception Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that?
Perception and Perspective in Robotics Paul Fitzpatrick MIT CSAIL USA experimentation helps perception Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that?
Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self
 Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT Modal and amodal features Modal and amodal features (following
Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT Modal and amodal features Modal and amodal features (following
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Lecture IV. Sensory processing during active versus passive movements
 Lecture IV Sensory processing during active versus passive movements The ability to distinguish sensory inputs that are a consequence of our own actions (reafference) from those that result from changes
Lecture IV Sensory processing during active versus passive movements The ability to distinguish sensory inputs that are a consequence of our own actions (reafference) from those that result from changes
Social Constraints on Animate Vision
 Social Constraints on Animate Vision Cynthia Breazeal, Aaron Edsinger, Paul Fitzpatrick, Brian Scassellati, Paulina Varchavskaia MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge,
Social Constraints on Animate Vision Cynthia Breazeal, Aaron Edsinger, Paul Fitzpatrick, Brian Scassellati, Paulina Varchavskaia MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge,
Humanoid Robots: A New Kind of Tool
 Humanoid Robots: A New Kind of Tool Bryan Adams, Cynthia Breazeal, Rodney Brooks, Brian Scassellati MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge, MA 02139 USA {bpadams, cynthia,
Humanoid Robots: A New Kind of Tool Bryan Adams, Cynthia Breazeal, Rodney Brooks, Brian Scassellati MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge, MA 02139 USA {bpadams, cynthia,
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Teaching robots: embodied machine learning strategies for networked robotic applications
 Teaching robots: embodied machine learning strategies for networked robotic applications Artur Arsenio Departamento de Engenharia Informática, Instituto Superior técnico / Universidade Técnica de Lisboa
Teaching robots: embodied machine learning strategies for networked robotic applications Artur Arsenio Departamento de Engenharia Informática, Instituto Superior técnico / Universidade Técnica de Lisboa
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Session 2: 10 Year Vision session (11:00-12:20) - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)
 - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)") Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
7Motion Perception. 7 Motion Perception. 7 Computation of Visual Motion. Chapter 7
 7Motion Perception Chapter 7 7 Motion Perception Computation of Visual Motion Eye Movements Using Motion Information The Man Who Couldn t See Motion 7 Computation of Visual Motion How would you build a
7Motion Perception Chapter 7 7 Motion Perception Computation of Visual Motion Eye Movements Using Motion Information The Man Who Couldn t See Motion 7 Computation of Visual Motion How would you build a
Insights into High-level Visual Perception
 Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Processing streams PSY 310 Greg Francis. Lecture 10. Neurophysiology
 Processing streams PSY 310 Greg Francis Lecture 10 A continuous surface infolded on itself. Neurophysiology We are working under the following hypothesis What we see is determined by the pattern of neural
Processing streams PSY 310 Greg Francis Lecture 10 A continuous surface infolded on itself. Neurophysiology We are working under the following hypothesis What we see is determined by the pattern of neural
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Perceptual Interfaces. Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces
 and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces") Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
HW- Finish your vision book!
 March 1 Table of Contents: 77. March 1 & 2 78. Vision Book Agenda: 1. Daily Sheet 2. Vision Notes and Discussion 3. Work on vision book! EQ- How does vision work? Do Now 1.Find your Vision Sensation fill-in-theblanks
March 1 Table of Contents: 77. March 1 & 2 78. Vision Book Agenda: 1. Daily Sheet 2. Vision Notes and Discussion 3. Work on vision book! EQ- How does vision work? Do Now 1.Find your Vision Sensation fill-in-theblanks
Hand & Upper Body Based Hybrid Gesture Recognition
 Hand & Upper Body Based Hybrid Gesture Prerna Sharma #1, Naman Sharma *2 # Research Scholor, G. B. P. U. A. & T. Pantnagar, India * Ideal Institue of Technology, Ghaziabad, India Abstract Communication
Hand & Upper Body Based Hybrid Gesture Prerna Sharma #1, Naman Sharma *2 # Research Scholor, G. B. P. U. A. & T. Pantnagar, India * Ideal Institue of Technology, Ghaziabad, India Abstract Communication
Android (Child android)
") Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Efficient Gesture Interpretation for Gesture-based Human-Service Robot Interaction
 Efficient Gesture Interpretation for Gesture-based Human-Service Robot Interaction D. Guo, X. M. Yin, Y. Jin and M. Xie School of Mechanical and Production Engineering Nanyang Technological University
Efficient Gesture Interpretation for Gesture-based Human-Service Robot Interaction D. Guo, X. M. Yin, Y. Jin and M. Xie School of Mechanical and Production Engineering Nanyang Technological University
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
2/3/2016. How We Move... Ecological View. Ecological View. Ecological View. Ecological View. Ecological View. Sensory Processing.
 How We Move Sensory Processing 2015 MFMER slide-4 2015 MFMER slide-7 Motor Processing 2015 MFMER slide-5 2015 MFMER slide-8 Central Processing Vestibular Somatosensation Visual Macular Peri-macular 2015
How We Move Sensory Processing 2015 MFMER slide-4 2015 MFMER slide-7 Motor Processing 2015 MFMER slide-5 2015 MFMER slide-8 Central Processing Vestibular Somatosensation Visual Macular Peri-macular 2015
TSBB15 Computer Vision
 TSBB15 Computer Vision Lecture 9 Biological Vision!1 Two parts 1. Systems perspective 2. Visual perception!2 Two parts 1. Systems perspective Based on Michael Land s and Dan-Eric Nilsson s work 2. Visual
TSBB15 Computer Vision Lecture 9 Biological Vision!1 Two parts 1. Systems perspective 2. Visual perception!2 Two parts 1. Systems perspective Based on Michael Land s and Dan-Eric Nilsson s work 2. Visual
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Vision-based User-interfaces for Pervasive Computing. CHI 2003 Tutorial Notes. Trevor Darrell Vision Interface Group MIT AI Lab
 Vision-based User-interfaces for Pervasive Computing Tutorial Notes Vision Interface Group MIT AI Lab Table of contents Biographical sketch..ii Agenda..iii Objectives.. iv Abstract..v Introduction....1
Vision-based User-interfaces for Pervasive Computing Tutorial Notes Vision Interface Group MIT AI Lab Table of contents Biographical sketch..ii Agenda..iii Objectives.. iv Abstract..v Introduction....1
Learning the Proprioceptive and Acoustic Properties of Household Objects. Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
 Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot
 International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
Graz University of Technology (Austria)
") Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
Computer Science and Information Technology. Spring 2009 Jane Hsu
 Computer Science and Information Technology Spring 2009 Jane Hsu http://agents.csie.ntu.edu.tw/~yjhsu/courses/csit/ai20090417.pdf Jane Hsu 04/17/2009 1 AI: Fact or Fiction? Jane Hsu 04/17/2009 2 How far
Computer Science and Information Technology Spring 2009 Jane Hsu http://agents.csie.ntu.edu.tw/~yjhsu/courses/csit/ai20090417.pdf Jane Hsu 04/17/2009 1 AI: Fact or Fiction? Jane Hsu 04/17/2009 2 How far
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Introduction to Mediated Reality
 INTERNATIONAL JOURNAL OF HUMAN COMPUTER INTERACTION, 15(2), 205 208 Copyright 2003, Lawrence Erlbaum Associates, Inc. Introduction to Mediated Reality Steve Mann Department of Electrical and Computer Engineering
INTERNATIONAL JOURNAL OF HUMAN COMPUTER INTERACTION, 15(2), 205 208 Copyright 2003, Lawrence Erlbaum Associates, Inc. Introduction to Mediated Reality Steve Mann Department of Electrical and Computer Engineering
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
2. Visually- Guided Grasping (3D)
") Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
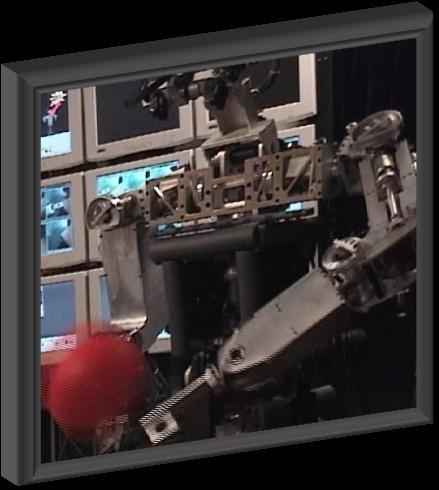
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Towards the development of cognitive robots
 Towards the development of cognitive robots Antonio Bandera Grupo de Ingeniería de Sistemas Integrados Universidad de Málaga, Spain Pablo Bustos RoboLab Universidad de Extremadura, Spain International
Towards the development of cognitive robots Antonio Bandera Grupo de Ingeniería de Sistemas Integrados Universidad de Málaga, Spain Pablo Bustos RoboLab Universidad de Extremadura, Spain International
Computer Vision in Human-Computer Interaction
 Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Fundamentals of Computer Vision
 Fundamentals of Computer Vision COMP 558 Course notes for Prof. Siddiqi's class. taken by Ruslana Makovetsky (Winter 2012) What is computer vision?! Broadly speaking, it has to do with making a computer
Fundamentals of Computer Vision COMP 558 Course notes for Prof. Siddiqi's class. taken by Ruslana Makovetsky (Winter 2012) What is computer vision?! Broadly speaking, it has to do with making a computer
Title Goes Here Algorithms for Biometric Authentication
 Title Goes Here Algorithms for Biometric Authentication February 2003 Vijayakumar Bhagavatula 1 Outline Motivation Challenges Technology: Correlation filters Example results Summary 2 Motivation Recognizing
Title Goes Here Algorithms for Biometric Authentication February 2003 Vijayakumar Bhagavatula 1 Outline Motivation Challenges Technology: Correlation filters Example results Summary 2 Motivation Recognizing
Human Vision and Human-Computer Interaction. Much content from Jeff Johnson, UI Wizards, Inc.
 Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Improving Spectroface using Pre-processing and Voting Ricardo Santos Dept. Informatics, University of Beira Interior, Portugal
 Improving Spectroface using Pre-processing and Voting Ricardo Santos Dept. Informatics, University of Beira Interior, Portugal Email: ricardo_psantos@hotmail.com Luís A. Alexandre Dept. Informatics, University
Improving Spectroface using Pre-processing and Voting Ricardo Santos Dept. Informatics, University of Beira Interior, Portugal Email: ricardo_psantos@hotmail.com Luís A. Alexandre Dept. Informatics, University
The Whole World in Your Hand: Active and Interactive Segmentation
 The Whole World in Your Hand: Active and Interactive Segmentation Artur Arsenio Paul Fitzpatrick Charles C. Kemp Giorgio Metta 1 MIT AI Lab Cambridge, Massachusetts, USA Lira Lab, DIST, University of Genova
The Whole World in Your Hand: Active and Interactive Segmentation Artur Arsenio Paul Fitzpatrick Charles C. Kemp Giorgio Metta 1 MIT AI Lab Cambridge, Massachusetts, USA Lira Lab, DIST, University of Genova
MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES
 MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES -2018 S.NO PROJECT CODE 1 ITIMP01 2 ITIMP02 3 ITIMP03 4 ITIMP04 5 ITIMP05 6 ITIMP06 7 ITIMP07 8 ITIMP08 9 ITIMP09 `10 ITIMP10 11 ITIMP11 12 ITIMP12 13 ITIMP13
MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES -2018 S.NO PROJECT CODE 1 ITIMP01 2 ITIMP02 3 ITIMP03 4 ITIMP04 5 ITIMP05 6 ITIMP06 7 ITIMP07 8 ITIMP08 9 ITIMP09 `10 ITIMP10 11 ITIMP11 12 ITIMP12 13 ITIMP13
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Using Humanoid Robots to Study Human Behavior
 Using Humanoid Robots to Study Human Behavior Christopher G. Atkeson 1;3,JoshHale 1;6, Mitsuo Kawato 1;2, Shinya Kotosaka 2, Frank Pollick 1;5, Marcia Riley 1;3, Stefan Schaal 2;4, Tomohiro Shibata 2,
Using Humanoid Robots to Study Human Behavior Christopher G. Atkeson 1;3,JoshHale 1;6, Mitsuo Kawato 1;2, Shinya Kotosaka 2, Frank Pollick 1;5, Marcia Riley 1;3, Stefan Schaal 2;4, Tomohiro Shibata 2,
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC)
 and Soft Computing (SC)") Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
Locomotion: Legs and Artificial Muscle. SUMMARY: Many labs at the forefront of robotic research, especially locomotive
 Topic: Locomotion, D1 Name: Gregg O Marr Date: March 2, 2000 Locomotion: Legs and Artificial Muscle SUMMARY: Many labs at the forefront of robotic research, especially locomotive research, are experimenting
Topic: Locomotion, D1 Name: Gregg O Marr Date: March 2, 2000 Locomotion: Legs and Artificial Muscle SUMMARY: Many labs at the forefront of robotic research, especially locomotive research, are experimenting
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
Lecturers. Alessandro Vinciarelli
 Lecturers Alessandro Vinciarelli Alessandro Vinciarelli, lecturer at the University of Glasgow (Department of Computing Science) and senior researcher of the Idiap Research Institute (Martigny, Switzerland.
Lecturers Alessandro Vinciarelli Alessandro Vinciarelli, lecturer at the University of Glasgow (Department of Computing Science) and senior researcher of the Idiap Research Institute (Martigny, Switzerland.
Artificial Intelligence. Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University
 Artificial Intelligence Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University What is AI? What is Intelligence? The ability to acquire and apply knowledge and skills (definition
Artificial Intelligence Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University What is AI? What is Intelligence? The ability to acquire and apply knowledge and skills (definition
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Complex Continuous Meaningful Humanoid Interaction: A Multi Sensory-Cue Based Approach
 Complex Continuous Meaningful Humanoid Interaction: A Multi Sensory-Cue Based Approach Gordon Cheng Humanoid Interaction Laboratory Intelligent Systems Division Electrotechnical Laboratory Tsukuba, Ibaraki,
Complex Continuous Meaningful Humanoid Interaction: A Multi Sensory-Cue Based Approach Gordon Cheng Humanoid Interaction Laboratory Intelligent Systems Division Electrotechnical Laboratory Tsukuba, Ibaraki,
Definitions of Ambient Intelligence
 Definitions of Ambient Intelligence 01QZP Ambient intelligence Fulvio Corno Politecnico di Torino, 2017/2018 http://praxis.cs.usyd.edu.au/~peterris Summary Technology trends Definition(s) Requested features
Definitions of Ambient Intelligence 01QZP Ambient intelligence Fulvio Corno Politecnico di Torino, 2017/2018 http://praxis.cs.usyd.edu.au/~peterris Summary Technology trends Definition(s) Requested features
21/01/2014. Fundamentals of the analysis of neuronal oscillations. Separating sources
 21/1/214 Separating sources Fundamentals of the analysis of neuronal oscillations Robert Oostenveld Donders Institute for Brain, Cognition and Behaviour Radboud University Nijmegen, The Netherlands Use
21/1/214 Separating sources Fundamentals of the analysis of neuronal oscillations Robert Oostenveld Donders Institute for Brain, Cognition and Behaviour Radboud University Nijmegen, The Netherlands Use
Engineering the future
 Engineering the future Could robot fishes be used for leading schools of fishes? Claudio Rossi Centre for Automation and Robotics (CAR), UPM-CSIC Workshop on ʻA role for exercise in improving welfare in
Engineering the future Could robot fishes be used for leading schools of fishes? Claudio Rossi Centre for Automation and Robotics (CAR), UPM-CSIC Workshop on ʻA role for exercise in improving welfare in
Real-time human control of robots for robot skill synthesis (and a bit
 Real-time human control of robots for robot skill synthesis (and a bit about imitation) Erhan Oztop JST/ICORP, ATR/CNS, JAPAN 1/31 IMITATION IN ARTIFICIAL SYSTEMS (1) Robotic systems that are able to imitate
Real-time human control of robots for robot skill synthesis (and a bit about imitation) Erhan Oztop JST/ICORP, ATR/CNS, JAPAN 1/31 IMITATION IN ARTIFICIAL SYSTEMS (1) Robotic systems that are able to imitate
Ant? Bird? Dog? Human -SURE
 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
 2016 International Conference on Information, Communication Technology and System (ICTS) Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
2016 International Conference on Information, Communication Technology and System (ICTS) Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
Vision V Perceiving Movement
 Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
INSTITUTO de SISTEMAS E ROBÓTICA Institute for Systems and Robotics
 - Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
- Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
Vision V Perceiving Movement
 Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Sonic Interaction Design: New applications and challenges for Interactive Sonification
 Sonic Interaction Design: New applications and challenges for Interactive Sonification Thomas Hermann Ambient Intelligence Group CITEC Bielefeld University Germany Keynote presentation DAFx 2010 Graz 2010-09-07
Sonic Interaction Design: New applications and challenges for Interactive Sonification Thomas Hermann Ambient Intelligence Group CITEC Bielefeld University Germany Keynote presentation DAFx 2010 Graz 2010-09-07
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Cognitive Science: What Is It, and How Can I Study It at RPI?
 Cognitive Science: What Is It, and How Can I Study It at RPI? What is Cognitive Science? Cognitive Science: Aspects of Cognition Cognitive science is the science of cognition, which includes such things
Cognitive Science: What Is It, and How Can I Study It at RPI? What is Cognitive Science? Cognitive Science: Aspects of Cognition Cognitive science is the science of cognition, which includes such things
Preprocessing of Digitalized Engineering Drawings
 Modern Applied Science; Vol. 9, No. 13; 2015 ISSN 1913-1844 E-ISSN 1913-1852 Published by Canadian Center of Science and Education Preprocessing of Digitalized Engineering Drawings Matúš Gramblička 1 &
Modern Applied Science; Vol. 9, No. 13; 2015 ISSN 1913-1844 E-ISSN 1913-1852 Published by Canadian Center of Science and Education Preprocessing of Digitalized Engineering Drawings Matúš Gramblička 1 &
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
A SURVEY ON GESTURE RECOGNITION TECHNOLOGY
 A SURVEY ON GESTURE RECOGNITION TECHNOLOGY Deeba Kazim 1, Mohd Faisal 2 1 MCA Student, Integral University, Lucknow (India) 2 Assistant Professor, Integral University, Lucknow (india) ABSTRACT Gesture
A SURVEY ON GESTURE RECOGNITION TECHNOLOGY Deeba Kazim 1, Mohd Faisal 2 1 MCA Student, Integral University, Lucknow (India) 2 Assistant Professor, Integral University, Lucknow (india) ABSTRACT Gesture
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
FROM AI TO IA AI: Artificial Intelligence IA: Intelligence Amplification Mieke De Ketelaere, SAS NEMEA
 FROM AI TO IA AI: Artificial Intelligence IA: Intelligence Amplification Mieke De Ketelaere, AI/CI @ SAS NEMEA About myself G.M. De Ketelaere University of Stuttgart, DE G.M. De Ketelaere and H.W. Guesgen
FROM AI TO IA AI: Artificial Intelligence IA: Intelligence Amplification Mieke De Ketelaere, AI/CI @ SAS NEMEA About myself G.M. De Ketelaere University of Stuttgart, DE G.M. De Ketelaere and H.W. Guesgen
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Texture recognition using force sensitive resistors
 Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Designing Human-Robot Interactions: The Good, the Bad and the Uncanny
 Designing Human-Robot Interactions: The Good, the Bad and the Uncanny Frank Pollick Department of Psychology University of Glasgow paco.psy.gla.ac.uk/ Talk available at: www.psy.gla.ac.uk/~frank/talks.html
Designing Human-Robot Interactions: The Good, the Bad and the Uncanny Frank Pollick Department of Psychology University of Glasgow paco.psy.gla.ac.uk/ Talk available at: www.psy.gla.ac.uk/~frank/talks.html
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS
 EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Contents. Mental Commit Robot (Mental Calming Robot) Industrial Robots. In What Way are These Robots Intelligent. Video: Mental Commit Robots
 Industrial Robots. In What Way are These Robots Intelligent. Video: Mental Commit Robots") Human Robot Interaction for Psychological Enrichment Dr. Takanori Shibata Senior Research Scientist Intelligent Systems Institute National Institute of Advanced Industrial Science and Technology (AIST)
Human Robot Interaction for Psychological Enrichment Dr. Takanori Shibata Senior Research Scientist Intelligent Systems Institute National Institute of Advanced Industrial Science and Technology (AIST)
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Cambrian Intelligence: The Early History Of The New AI PDF
 Cambrian Intelligence: The Early History Of The New AI PDF Until the mid-1980s, AI researchers assumed that an intelligent system doing high-level reasoning was necessary for the coupling of perception
Cambrian Intelligence: The Early History Of The New AI PDF Until the mid-1980s, AI researchers assumed that an intelligent system doing high-level reasoning was necessary for the coupling of perception
Designing Toys That Come Alive: Curious Robots for Creative Play
 Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Non Verbal Communication of Emotions in Social Robots
 Non Verbal Communication of Emotions in Social Robots Aryel Beck Supervisor: Prof. Nadia Thalmann BeingThere Centre, Institute for Media Innovation, Nanyang Technological University, Singapore INTRODUCTION
Non Verbal Communication of Emotions in Social Robots Aryel Beck Supervisor: Prof. Nadia Thalmann BeingThere Centre, Institute for Media Innovation, Nanyang Technological University, Singapore INTRODUCTION
Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention
 Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention Tetsunari Inamura, Naoki Kojo, Tomoyuki Sonoda, Kazuyuki Sakamoto, Kei Okada and Masayuki Inaba Department
Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention Tetsunari Inamura, Naoki Kojo, Tomoyuki Sonoda, Kazuyuki Sakamoto, Kei Okada and Masayuki Inaba Department
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Monaural and Binaural Speech Separation
 Monaural and Binaural Speech Separation DeLiang Wang Perception & Neurodynamics Lab The Ohio State University Outline of presentation Introduction CASA approach to sound separation Ideal binary mask as
Monaural and Binaural Speech Separation DeLiang Wang Perception & Neurodynamics Lab The Ohio State University Outline of presentation Introduction CASA approach to sound separation Ideal binary mask as
Multi-modal Human-computer Interaction
 Multi-modal Human-computer Interaction Attila Fazekas Attila.Fazekas@inf.unideb.hu SSIP 2008, 9 July 2008 Hungary and Debrecen Multi-modal Human-computer Interaction - 2 Debrecen Big Church Multi-modal
Multi-modal Human-computer Interaction Attila Fazekas Attila.Fazekas@inf.unideb.hu SSIP 2008, 9 July 2008 Hungary and Debrecen Multi-modal Human-computer Interaction - 2 Debrecen Big Church Multi-modal