Neural Network Application in Robotics
|
|
|
- Solomon Lambert
- 6 years ago
- Views:
Transcription
1 Neural Network Application in Robotics Development of Autonomous Aero-Robot and its Applications to Safety and Disaster Prevention with the help of neural network Sharique Hayat 1, R. N. Mall 2 1. M.Tech. Final Year CIM, MMMEC Gorakhpur 2. Asstt. Professor, MMMEC Gorakhpur Abstract- To develop an autonomous robot with the application of neural network and to apply it for monitoring and rescue activities in case of natural or manmade disaster and also implementing the neural network in Maruti Udyog Gurgaon for increasing the productivity and more quality improvement of the system. 1.I NTRODUCTION The term neural network is used to refer to a network or circuit of biological neurons. The modern usage of the term often refers to artificial neural networks, which are composed of artificial neurons or nodes OVERVIEW A biological neural network is composed of a group or groups of chemically connected or functionally associated neurons. A single neuron may be connected to many other neurons and the total number of neurons and connections in a network may be extensive. Connections, called synapses, are usually formed from axons to dendrites, though dendrodendritic microcircuits and other connections are possible Use of neural network Neural networks, with their remarkable ability to derive meaning from complicated data, can be used to extract patterns and detect trends that are too complex to be noticed by either humans or other computer techniques. A trained neural network can be thought of as an "expert" in the 2632
2 category of information it has been given to analyse. This expert can then be used to provide projections given new situations of interest and answer "what if" questions. Other advantages include: 1. Adaptive learning: An ability to learn how to do tasks based on the data given for training or initial experience. 2. Self-Organisation: An ANN can create its own organisation or representation of the information it receives during learning time. 3. Real Time Operation: ANN computations may be carried out in parallel, and special hardware devices are being designed and manufactured which take advantage of this capability. 4. Fault Tolerance via Redundant Information Coding: Partial destruction of a network leads to the corresponding degradation of performance. However, some network capabilities may be retained even with major network damage. FUNDAMENTAL DESIGNING OF NEURAL NETWORK The design of neural networks and how to use them as a robot brain, simple neural network consisting of only two inputs and two outputs. In this diagram there are the inputs 'sensors' and the outputs 'motors'. The relationship between the sensors and the motors can be described in the following table ( 2633
.")
3 means on and -1 means off). If a sensor is on it means the switch is activated 1.2 HOW TO DESIGN A NEURAL BRAIN 1.Determine what you want the robot to do. 2.Determine the number and types of input you require. 3.Determine the number of outputs you require. 4.Map inputs and outputs to a vector (both must be in the same vector). If it has less inputs and outputs than points in the vector spread them evenly 5.Make a complete set as described in point 4 for all possible combinations of inputs and outputs. 6.Repeat step 5 but this time only put the inputs in the vectors. 7.Now play around with the different variables in neuroqb.zip and try to find the most effective combination 1.3 Developing Autonomous Flight Control Systems for Robot Helicopter by use of Neural Network; The following areas in the flight system where application of neural network are enable. Hierarchy structure of Autonomous Flight Control of UAVs top Situation Awareness Command Interface middle Switching Flight Mode 2634
4 Velocity Control Positioning Control etc. Reconfiguring Flight Control Fault Detection Flight Controller bottom Designing OF Flight Controller Two methods are important for designing of flight controller; 1. Knowledge of Many Experts 2. Results of Many Experiments Designing Control Systems for Complex Systems When there are complex problem comes different methods are implemented; 1. Conventional methods 2. Linearizing of nonlinear dynamics 3. Switching linear controllers 4. Dividing the whole system into some sub-systems 5. Singular Perturbation are required to design control systems Proposed method Using neural network training Treating complex systems directly and in holistic approach Controller using Neural Network Ability of neural network Learning Training Off-line Training Training method based on Gradient Training method based on Powell s conjugated direction algorithm On-line Training Designing and Developing Control Systems Reconstruction or Reconfiguring Control Systems 2635
 Case1.")
5 1.4 Method to Design Controllers by Use of Neural Networks Training a neural network Optimization of a performance index In developing autonomous flight controller of UAVs, the algorithm enables to use mat lab software. On-line Training of Neural Network Indoor Experiment using a small helicopter(electrically powered) Case1. Under disturbance A: without network(no disturbance) B: without network(witdisturbance) C: with network(with disturbance) 2636
6 Case2. Efficiency of the control is reduced A:with network B:without network For the reliability of the autonomous flight Numerical Simulations Inputs of a neural network Altitudez velocity v z Pseudo-Input U= -K p (z-d)-k d v z Output of a neural network Collective control δ collective Nonlinear dynamics is easily transformed to a linear dynamics 2637
7 Results of Flight Experiments Hovering by PD Controller E[err] (cm) Var[err] (cm 2 ) 50 0 without online training with online training Hovering by Neural Networks E[err] (cm) Var[err] (cm 2 ) without online training with online training Training Controller for Linearization U f ( y, y, u) K ( y d) K p d y With the help of Hovering and PD Controller method the actual flight position are shows in the graph by red and blue curves and resulted parameters are calculated. By the analysis it comes out that when the neural network implement in the flight control its become more accurate then the before. 2638

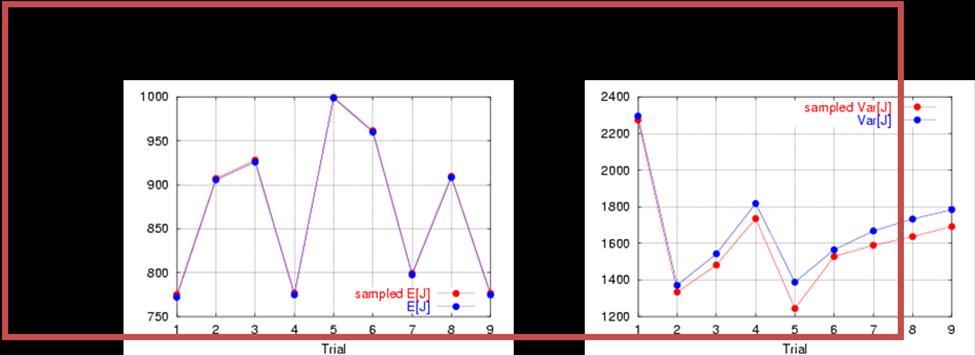
8 Index for Training 2639
9 1.5 Applications of neural networks sales forecasting industrial process control customer research data validation risk management target marketing APPLICATION OF ROBOTS IN ASSEMBLY The final assembly is still the most labour intensive of all the automobile production shops. The share of the final assembly in total man-hours required for the manufacture of a car is almost 50%. Under the condition, the assembly line becomes most sensitive to labour attitude and productivity. Automation through robot is the universal approach in final assembly operations. However, the robot used in these operations require precise control, that is attained in one of the following two ways: The control function is embedded in the tools or implements, and the robot works in a play back mode based on comparatively simple message exchange.the robot is provided with pattern recognition through visual and tactile sensors and is made to operate in an intelligent manner. 2640
10 The robot functions are improved through combination with peripheral tools, and the superiority of robots over human workers is enhanced. Summary Neural Networks have been used in a variety of linear and non-linear controllers. Neural networks can handle one or more inputs and outputs. Neural networks do not work well when dealing with the mathematical problem of converting space coordinates to joint coordinates. Neural networks have been used in most popular control schemes including controlling un modelled processes. Various sensors have been used successfully with neural networks. Back propagation is the most popular neural network paradigm for robotics research. Conclusion;.The total sheduling time for the manufacturing of car will be reduced and it reduces the number of robots, so that more workstation will be there. The application of neural network in robotics to the flight control for monitoring and rescue activities FUTURE WORK; Neural network application are enabled in maruti udyog gurgaon. The total sheduling time for the manufacturing of a car will be reduced and it reduces the number of robots, so that more workstation will be there. 2641
11 . LIST OF FIGURES 2642

12 Past and Present SCOPE fig. Manufactuing of Cars in Maruti Udyog Gurgaon The applications of neural network in robotics are following. Financial Analysis -- stock predictions. Signature Analysis -- the banks in America have taken to NNs to compare signatures with what is stored. Process Control Oversight -- NNs are used to advise aircraft pilots of engine problems. Direct Marketing -- NNs can monitor results from a test mailing and determine the most successful areas. 2643
13 Neural network have been used in variety of linear and non linear controllers.it can handle one or more inputs and outputs, neural network have been used in most populer control schemes including controlling un modelled processes. Implementation of neural network in maruti udyog The number of robots are implementing in the maruti udyod plant. Trere are different operations are done by the number of robots in the plant.so by applying the neural network all the operations are done by a single robot. By applying the neural network application in the plant the number of robots reduced and the multifunctional task will be done in a single plateform. References 1) Industrial Applications of Neural Networks (research reports Esprit, I.F.Croall, J.P.Mason) 2) An introduction to neural computing. Aleksander, I. and Morton, H. 2nd edition 3) Demarse,Thomas B., Wagenaar,Douglas A., Blau,Axel W., & Potter,Steve M., The Neutrally Controlled Animate: Biological Brains Acting with Simulated Bodies, Autonomous Robots, Kluwer Academic Publishers, ) Pomerleau, Dean A. Neural Network Vision for Robot Driving, The Handbook of Brain Theory and Neural Networks, M. Arbib, ed., BIBLIOGRAPHY 2644
Application Areas of AI Artificial intelligence is divided into different branches which are mentioned below:
 Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
MINE 432 Industrial Automation and Robotics
 MINE 432 Industrial Automation and Robotics Part 3, Lecture 5 Overview of Artificial Neural Networks A. Farzanegan (Visiting Associate Professor) Fall 2014 Norman B. Keevil Institute of Mining Engineering
MINE 432 Industrial Automation and Robotics Part 3, Lecture 5 Overview of Artificial Neural Networks A. Farzanegan (Visiting Associate Professor) Fall 2014 Norman B. Keevil Institute of Mining Engineering
Sonia Sharma ECE Department, University Institute of Engineering and Technology, MDU, Rohtak, India. Fig.1.Neuron and its connection
 NEUROCOMPUTATION FOR MICROSTRIP ANTENNA Sonia Sharma ECE Department, University Institute of Engineering and Technology, MDU, Rohtak, India Abstract: A Neural Network is a powerful computational tool that
NEUROCOMPUTATION FOR MICROSTRIP ANTENNA Sonia Sharma ECE Department, University Institute of Engineering and Technology, MDU, Rohtak, India Abstract: A Neural Network is a powerful computational tool that
Course Objectives. This course gives a basic neural network architectures and learning rules.
 Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
Introduction to Artificial Intelligence. Department of Electronic Engineering 2k10 Session - Artificial Intelligence
 Introduction to Artificial Intelligence What is Intelligence??? Intelligence is the ability to learn about, to learn from, to understand about, and interact with one s environment. Intelligence is the
Introduction to Artificial Intelligence What is Intelligence??? Intelligence is the ability to learn about, to learn from, to understand about, and interact with one s environment. Intelligence is the
Implementation of a Choquet Fuzzy Integral Based Controller on a Real Time System
 Implementation of a Choquet Fuzzy Integral Based Controller on a Real Time System SMRITI SRIVASTAVA ANKUR BANSAL DEEPAK CHOPRA GAURAV GOEL Abstract The paper discusses about the Choquet Fuzzy Integral
Implementation of a Choquet Fuzzy Integral Based Controller on a Real Time System SMRITI SRIVASTAVA ANKUR BANSAL DEEPAK CHOPRA GAURAV GOEL Abstract The paper discusses about the Choquet Fuzzy Integral
MAGNT Research Report (ISSN ) Vol.6(1). PP , Controlling Cost and Time of Construction Projects Using Neural Network
 Vol.6(1). PP , Controlling Cost and Time of Construction Projects Using Neural Network") Controlling Cost and Time of Construction Projects Using Neural Network Li Ping Lo Faculty of Computer Science and Engineering Beijing University China Abstract In order to achieve optimized management,
Controlling Cost and Time of Construction Projects Using Neural Network Li Ping Lo Faculty of Computer Science and Engineering Beijing University China Abstract In order to achieve optimized management,
Artificial Neural Networks
 Artificial Neural Networks ABSTRACT Just as life attempts to understand itself better by modeling it, and in the process create something new, so Neural computing is an attempt at modeling the workings
Artificial Neural Networks ABSTRACT Just as life attempts to understand itself better by modeling it, and in the process create something new, so Neural computing is an attempt at modeling the workings
Computational Intelligence Introduction
 Computational Intelligence Introduction Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Neural Networks 1/21 Fuzzy Systems What are
Computational Intelligence Introduction Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Neural Networks 1/21 Fuzzy Systems What are
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE
 HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
Available online at ScienceDirect. Procedia Computer Science 24 (2013 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Representation Learning for Mobile Robots in Dynamic Environments
 Representation Learning for Mobile Robots in Dynamic Environments Olivia Michael Supervised by A/Prof. Oliver Obst Western Sydney University Vacation Research Scholarships are funded jointly by the Department
Representation Learning for Mobile Robots in Dynamic Environments Olivia Michael Supervised by A/Prof. Oliver Obst Western Sydney University Vacation Research Scholarships are funded jointly by the Department
Proposers Day Workshop
 Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
FACE RECOGNITION USING NEURAL NETWORKS
 Int. J. Elec&Electr.Eng&Telecoms. 2014 Vinoda Yaragatti and Bhaskar B, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 2014 IJEETC. All Rights Reserved FACE RECOGNITION USING
Int. J. Elec&Electr.Eng&Telecoms. 2014 Vinoda Yaragatti and Bhaskar B, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 2014 IJEETC. All Rights Reserved FACE RECOGNITION USING
DC Motor Speed Control using Artificial Neural Network
 International Journal of Modern Communication Technologies & Research (IJMCTR) ISSN: 2321-0850, Volume-2, Issue-2, February 2014 DC Motor Speed Control using Artificial Neural Network Yogesh, Swati Gupta,
International Journal of Modern Communication Technologies & Research (IJMCTR) ISSN: 2321-0850, Volume-2, Issue-2, February 2014 DC Motor Speed Control using Artificial Neural Network Yogesh, Swati Gupta,
Artificial Neural Networks approach to the voltage sag classification
 Artificial Neural Networks approach to the voltage sag classification F. Ortiz, A. Ortiz, M. Mañana, C. J. Renedo, F. Delgado, L. I. Eguíluz Department of Electrical and Energy Engineering E.T.S.I.I.,
Artificial Neural Networks approach to the voltage sag classification F. Ortiz, A. Ortiz, M. Mañana, C. J. Renedo, F. Delgado, L. I. Eguíluz Department of Electrical and Energy Engineering E.T.S.I.I.,
On Intelligence Jeff Hawkins
 On Intelligence Jeff Hawkins Chapter 8: The Future of Intelligence April 27, 2006 Presented by: Melanie Swan, Futurist MS Futures Group 650-681-9482 m@melanieswan.com http://www.melanieswan.com Building
On Intelligence Jeff Hawkins Chapter 8: The Future of Intelligence April 27, 2006 Presented by: Melanie Swan, Futurist MS Futures Group 650-681-9482 m@melanieswan.com http://www.melanieswan.com Building
A Comprehensive Study of Artificial Neural Networks
 A Comprehensive Study of Artificial Neural Networks Md Anis Alam 1, Bintul Zehra 2,Neha Agrawal 3 12 3 Research Scholars, Department of Electronics & Communication Engineering, Al-Falah School of Engineering
A Comprehensive Study of Artificial Neural Networks Md Anis Alam 1, Bintul Zehra 2,Neha Agrawal 3 12 3 Research Scholars, Department of Electronics & Communication Engineering, Al-Falah School of Engineering
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
CHAPTER 6 ANFIS BASED NEURO-FUZZY CONTROLLER
 143 CHAPTER 6 ANFIS BASED NEURO-FUZZY CONTROLLER 6.1 INTRODUCTION The quality of generated electricity in power system is dependent on the system output, which has to be of constant frequency and must
143 CHAPTER 6 ANFIS BASED NEURO-FUZZY CONTROLLER 6.1 INTRODUCTION The quality of generated electricity in power system is dependent on the system output, which has to be of constant frequency and must
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules.
 Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Neural Models for Multi-Sensor Integration in Robotics
 Department of Informatics Intelligent Robotics WS 2016/17 Neural Models for Multi-Sensor Integration in Robotics Josip Josifovski 4josifov@informatik.uni-hamburg.de Outline Multi-sensor Integration: Neurally
Department of Informatics Intelligent Robotics WS 2016/17 Neural Models for Multi-Sensor Integration in Robotics Josip Josifovski 4josifov@informatik.uni-hamburg.de Outline Multi-sensor Integration: Neurally
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
Artificial Neural Networks. Artificial Intelligence Santa Clara, 2016
 Artificial Neural Networks Artificial Intelligence Santa Clara, 2016 Simulate the functioning of the brain Can simulate actual neurons: Computational neuroscience Can introduce simplified neurons: Neural
Artificial Neural Networks Artificial Intelligence Santa Clara, 2016 Simulate the functioning of the brain Can simulate actual neurons: Computational neuroscience Can introduce simplified neurons: Neural
ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS
 ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS Prof.Somashekara Reddy 1, Kusuma S 2 1 Department of MCA, NHCE Bangalore, India 2 Kusuma S, Department of MCA, NHCE Bangalore, India Abstract: Artificial Intelligence
ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS Prof.Somashekara Reddy 1, Kusuma S 2 1 Department of MCA, NHCE Bangalore, India 2 Kusuma S, Department of MCA, NHCE Bangalore, India Abstract: Artificial Intelligence
بسم اهلل الرحمن الرحيم. Introduction to Neural Networks
 Textbooks: بسم اهلل الرحمن الرحيم. Introduction to Neural Networks Martin T. Hagan, Howard B. Demuth, Mark Beale, Orlando De Jesús, Neural Network Design. 2014. Simon Haykin, Neural Networks and Learning
Textbooks: بسم اهلل الرحمن الرحيم. Introduction to Neural Networks Martin T. Hagan, Howard B. Demuth, Mark Beale, Orlando De Jesús, Neural Network Design. 2014. Simon Haykin, Neural Networks and Learning
Application of ANN to Predict Reinforcement Height of Weld Bead under Magnetic Field
 Application of ANN to Predict Height of Weld Bead under Magnetic Field R.P. Singh 1, R.C. Gupta 2, S.C. Sarkar 3, K.G. Sharma 4, 5 P.K.S. Rathore 1 Mechanical Engineering Depart, I.E.T., G.L.A. University
Application of ANN to Predict Height of Weld Bead under Magnetic Field R.P. Singh 1, R.C. Gupta 2, S.C. Sarkar 3, K.G. Sharma 4, 5 P.K.S. Rathore 1 Mechanical Engineering Depart, I.E.T., G.L.A. University
Demystifying Machine Learning
 Demystifying Machine Learning By Simon Agius Muscat Software Engineer with RightBrain PyMalta, 19/07/18 http://www.rightbrain.com.mt 0. Talk outline 1. Explain the reasoning behind my talk 2. Defining
Demystifying Machine Learning By Simon Agius Muscat Software Engineer with RightBrain PyMalta, 19/07/18 http://www.rightbrain.com.mt 0. Talk outline 1. Explain the reasoning behind my talk 2. Defining
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
ES 492: SCIENCE IN THE MOVIES
 UNIVERSITY OF SOUTH ALABAMA ES 492: SCIENCE IN THE MOVIES LECTURE 5: ROBOTICS AND AI PRESENTER: HANNAH BECTON TODAY'S AGENDA 1. Robotics and Real-Time Systems 2. Reacting to the environment around them
UNIVERSITY OF SOUTH ALABAMA ES 492: SCIENCE IN THE MOVIES LECTURE 5: ROBOTICS AND AI PRESENTER: HANNAH BECTON TODAY'S AGENDA 1. Robotics and Real-Time Systems 2. Reacting to the environment around them
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D.
 Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
A User Friendly Software Framework for Mobile Robot Control
 A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
What is matter, never mind What is mind, doesn t matter. Or Does it!!??
 What is matter, never mind What is mind, doesn t matter. Or Does it!!?? John Connor: So can learn stuff you haven t been programmed with, so that you can be more. u know more Human!!? The Terminator: My
What is matter, never mind What is mind, doesn t matter. Or Does it!!?? John Connor: So can learn stuff you haven t been programmed with, so that you can be more. u know more Human!!? The Terminator: My
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
NEURAL NETWORK DEMODULATOR FOR QUADRATURE AMPLITUDE MODULATION (QAM)
") NEURAL NETWORK DEMODULATOR FOR QUADRATURE AMPLITUDE MODULATION (QAM) Ahmed Nasraden Milad M. Aziz M Rahmadwati Artificial neural network (ANN) is one of the most advanced technology fields, which allows
NEURAL NETWORK DEMODULATOR FOR QUADRATURE AMPLITUDE MODULATION (QAM) Ahmed Nasraden Milad M. Aziz M Rahmadwati Artificial neural network (ANN) is one of the most advanced technology fields, which allows
We Know Where You Are : Indoor WiFi Localization Using Neural Networks Tong Mu, Tori Fujinami, Saleil Bhat
 We Know Where You Are : Indoor WiFi Localization Using Neural Networks Tong Mu, Tori Fujinami, Saleil Bhat Abstract: In this project, a neural network was trained to predict the location of a WiFi transmitter
We Know Where You Are : Indoor WiFi Localization Using Neural Networks Tong Mu, Tori Fujinami, Saleil Bhat Abstract: In this project, a neural network was trained to predict the location of a WiFi transmitter
IDENTIFICATION OF POWER QUALITY PROBLEMS IN IEEE BUS SYSTEM BY USING NEURAL NETWORKS
 Fourth International Conference on Control System and Power Electronics CSPE IDENTIFICATION OF POWER QUALITY PROBLEMS IN IEEE BUS SYSTEM BY USING NEURAL NETWORKS Mr. Devadasu * and Dr. M Sushama ** * Associate
Fourth International Conference on Control System and Power Electronics CSPE IDENTIFICATION OF POWER QUALITY PROBLEMS IN IEEE BUS SYSTEM BY USING NEURAL NETWORKS Mr. Devadasu * and Dr. M Sushama ** * Associate
Indirect Vector Control of Induction Motor Using Pi Speed Controller and Neural Networks
 Vol.3, Issue.4, Jul - Aug. 2013 pp-1980-1987 ISSN: 2249-6645 Indirect Vector Control of Induction Motor Using Pi Speed Controller and Neural Networks C. Mohan Krishna M. Tech 1, G. Meerimatha M.Tech 2,
Vol.3, Issue.4, Jul - Aug. 2013 pp-1980-1987 ISSN: 2249-6645 Indirect Vector Control of Induction Motor Using Pi Speed Controller and Neural Networks C. Mohan Krishna M. Tech 1, G. Meerimatha M.Tech 2,
IMPLEMENTATION OF NEURAL NETWORK IN ENERGY SAVING OF INDUCTION MOTOR DRIVES WITH INDIRECT VECTOR CONTROL
 IMPLEMENTATION OF NEURAL NETWORK IN ENERGY SAVING OF INDUCTION MOTOR DRIVES WITH INDIRECT VECTOR CONTROL * A. K. Sharma, ** R. A. Gupta, and *** Laxmi Srivastava * Department of Electrical Engineering,
IMPLEMENTATION OF NEURAL NETWORK IN ENERGY SAVING OF INDUCTION MOTOR DRIVES WITH INDIRECT VECTOR CONTROL * A. K. Sharma, ** R. A. Gupta, and *** Laxmi Srivastava * Department of Electrical Engineering,
Introduction to Machine Learning
 Introduction to Machine Learning Perceptron Barnabás Póczos Contents History of Artificial Neural Networks Definitions: Perceptron, Multi-Layer Perceptron Perceptron algorithm 2 Short History of Artificial
Introduction to Machine Learning Perceptron Barnabás Póczos Contents History of Artificial Neural Networks Definitions: Perceptron, Multi-Layer Perceptron Perceptron algorithm 2 Short History of Artificial
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Fault Diagnosis of Analog Circuit Using DC Approach and Neural Networks
 294 Fault Diagnosis of Analog Circuit Using DC Approach and Neural Networks Ajeet Kumar Singh 1, Ajay Kumar Yadav 2, Mayank Kumar 3 1 M.Tech, EC Department, Mewar University Chittorgarh, Rajasthan, INDIA
294 Fault Diagnosis of Analog Circuit Using DC Approach and Neural Networks Ajeet Kumar Singh 1, Ajay Kumar Yadav 2, Mayank Kumar 3 1 M.Tech, EC Department, Mewar University Chittorgarh, Rajasthan, INDIA
Process Planning - The Link Between Varying Products and their Manufacturing Systems p. 37
 Definitions and Strategies Changeability - An Introduction p. 3 Motivation p. 3 Evolution of Factories p. 7 Deriving the Objects of Changeability p. 8 Elements of Changeable Manufacturing p. 10 Factory
Definitions and Strategies Changeability - An Introduction p. 3 Motivation p. 3 Evolution of Factories p. 7 Deriving the Objects of Changeability p. 8 Elements of Changeable Manufacturing p. 10 Factory
Computer Science. Using neural networks and genetic algorithms in a Pac-man game
 Computer Science Using neural networks and genetic algorithms in a Pac-man game Jaroslav Klíma Candidate D 0771 008 Gymnázium Jura Hronca 2003 Word count: 3959 Jaroslav Klíma D 0771 008 Page 1 Abstract:
Computer Science Using neural networks and genetic algorithms in a Pac-man game Jaroslav Klíma Candidate D 0771 008 Gymnázium Jura Hronca 2003 Word count: 3959 Jaroslav Klíma D 0771 008 Page 1 Abstract:
Fault Detection and Diagnosis-A Review
 Fault Detection and Diagnosis-A Review Karan Mehta 1, Dinesh Kumar Sharma 2 1 IV year Student, Department of Electronic Instrumentation and Control, Poornima College of Engineering 2 Assistant Professor,
Fault Detection and Diagnosis-A Review Karan Mehta 1, Dinesh Kumar Sharma 2 1 IV year Student, Department of Electronic Instrumentation and Control, Poornima College of Engineering 2 Assistant Professor,
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
intelligent subsea control
 40 SUBSEA CONTROL How artificial intelligence can be used to minimise well shutdown through integrated fault detection and analysis. By E Altamiranda and E Colina. While there might be topside, there are
40 SUBSEA CONTROL How artificial intelligence can be used to minimise well shutdown through integrated fault detection and analysis. By E Altamiranda and E Colina. While there might be topside, there are
Alternative Face Recognition Using Neural Network
 International Journal of Computer (IJC) ISSN 2307-4523 (Print & Online) Global Society of Scientific Research and Researchers http://ijcjournal.org/ Alternative Face Recognition Using Neural Network Mr.
International Journal of Computer (IJC) ISSN 2307-4523 (Print & Online) Global Society of Scientific Research and Researchers http://ijcjournal.org/ Alternative Face Recognition Using Neural Network Mr.
Comparison of Various Neural Network Algorithms Used for Location Estimation in Wireless Communication
 Comparison of Various Neural Network Algorithms Used for Location Estimation in Wireless Communication * Shashank Mishra 1, G.S. Tripathi M.Tech. Student, Dept. of Electronics and Communication Engineering,
Comparison of Various Neural Network Algorithms Used for Location Estimation in Wireless Communication * Shashank Mishra 1, G.S. Tripathi M.Tech. Student, Dept. of Electronics and Communication Engineering,
Figure 1. Artificial Neural Network structure. B. Spiking Neural Networks Spiking Neural networks (SNNs) fall into the third generation of neural netw
 fall into the third generation of neural netw") Review Analysis of Pattern Recognition by Neural Network Soni Chaturvedi A.A.Khurshid Meftah Boudjelal Electronics & Comm Engg Electronics & Comm Engg Dept. of Computer Science P.I.E.T, Nagpur RCOEM, Nagpur
Review Analysis of Pattern Recognition by Neural Network Soni Chaturvedi A.A.Khurshid Meftah Boudjelal Electronics & Comm Engg Electronics & Comm Engg Dept. of Computer Science P.I.E.T, Nagpur RCOEM, Nagpur
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
CHAPTER 1: INTRODUCTION. Multiagent Systems mjw/pubs/imas/
 CHAPTER 1: INTRODUCTION Multiagent Systems http://www.csc.liv.ac.uk/ mjw/pubs/imas/ Five Trends in the History of Computing ubiquity; interconnection; intelligence; delegation; and human-orientation. http://www.csc.liv.ac.uk/
CHAPTER 1: INTRODUCTION Multiagent Systems http://www.csc.liv.ac.uk/ mjw/pubs/imas/ Five Trends in the History of Computing ubiquity; interconnection; intelligence; delegation; and human-orientation. http://www.csc.liv.ac.uk/
A Multilayer Artificial Neural Network for Target Identification Using Radar Information
 Available online at www.ijiems.com A Multilayer Artificial Neural Network for Target Identification Using Radar Information James Rodrigeres 1, Joy Fundil 1, International Hellenic University, School of
Available online at www.ijiems.com A Multilayer Artificial Neural Network for Target Identification Using Radar Information James Rodrigeres 1, Joy Fundil 1, International Hellenic University, School of
Building a Machining Knowledge Base for Intelligent Machine Tools
 Proceedings of the 11th WSEAS International Conference on SYSTEMS, Agios Nikolaos, Crete Island, Greece, July 23-25, 2007 332 Building a Machining Knowledge Base for Intelligent Machine Tools SEUNG WOO
Proceedings of the 11th WSEAS International Conference on SYSTEMS, Agios Nikolaos, Crete Island, Greece, July 23-25, 2007 332 Building a Machining Knowledge Base for Intelligent Machine Tools SEUNG WOO
Target Recognition and Tracking based on Data Fusion of Radar and Infrared Image Sensors
 Target Recognition and Tracking based on Data Fusion of Radar and Infrared Image Sensors Jie YANG Zheng-Gang LU Ying-Kai GUO Institute of Image rocessing & Recognition, Shanghai Jiao-Tong University, China
Target Recognition and Tracking based on Data Fusion of Radar and Infrared Image Sensors Jie YANG Zheng-Gang LU Ying-Kai GUO Institute of Image rocessing & Recognition, Shanghai Jiao-Tong University, China
FAULT DIAGNOSIS AND PERFORMANCE ASSESSMENT FOR A ROTARY ACTUATOR BASED ON NEURAL NETWORK OBSERVER
 7 Journal of Marine Science and Technology, Vol., No., pp. 7-78 () DOI:.9/JMST-3 FAULT DIAGNOSIS AND PERFORMANCE ASSESSMENT FOR A ROTARY ACTUATOR BASED ON NEURAL NETWORK OBSERVER Jian Ma,, Xin Li,, Chen
7 Journal of Marine Science and Technology, Vol., No., pp. 7-78 () DOI:.9/JMST-3 FAULT DIAGNOSIS AND PERFORMANCE ASSESSMENT FOR A ROTARY ACTUATOR BASED ON NEURAL NETWORK OBSERVER Jian Ma,, Xin Li,, Chen
SpiNNaker SPIKING NEURAL NETWORK ARCHITECTURE MAX BROWN NICK BARLOW
 SpiNNaker SPIKING NEURAL NETWORK ARCHITECTURE MAX BROWN NICK BARLOW OVERVIEW What is SpiNNaker Architecture Spiking Neural Networks Related Work Router Commands Task Scheduling Related Works / Projects
SpiNNaker SPIKING NEURAL NETWORK ARCHITECTURE MAX BROWN NICK BARLOW OVERVIEW What is SpiNNaker Architecture Spiking Neural Networks Related Work Router Commands Task Scheduling Related Works / Projects
Machinery Prognostics and Health Management. Paolo Albertelli Politecnico di Milano
 Machinery Prognostics and Health Management Paolo Albertelli Politecnico di Milano (paollo.albertelli@polimi.it) Goals of the Presentation maintenance approaches and companies that deals with manufacturing
Machinery Prognostics and Health Management Paolo Albertelli Politecnico di Milano (paollo.albertelli@polimi.it) Goals of the Presentation maintenance approaches and companies that deals with manufacturing
NEURAL NETWORK BASED LOAD FREQUENCY CONTROL FOR RESTRUCTURING POWER INDUSTRY
 Nigerian Journal of Technology (NIJOTECH) Vol. 31, No. 1, March, 2012, pp. 40 47. Copyright c 2012 Faculty of Engineering, University of Nigeria. ISSN 1115-8443 NEURAL NETWORK BASED LOAD FREQUENCY CONTROL
Nigerian Journal of Technology (NIJOTECH) Vol. 31, No. 1, March, 2012, pp. 40 47. Copyright c 2012 Faculty of Engineering, University of Nigeria. ISSN 1115-8443 NEURAL NETWORK BASED LOAD FREQUENCY CONTROL
ENTRY ARTIFICIAL INTELLIGENCE
 ENTRY ARTIFICIAL INTELLIGENCE [ENTRY ARTIFICIAL INTELLIGENCE] Authors: Oliver Knill: March 2000 Literature: Peter Norvig, Paradigns of Artificial Intelligence Programming Daniel Juravsky and James Martin,
ENTRY ARTIFICIAL INTELLIGENCE [ENTRY ARTIFICIAL INTELLIGENCE] Authors: Oliver Knill: March 2000 Literature: Peter Norvig, Paradigns of Artificial Intelligence Programming Daniel Juravsky and James Martin,
Inteligência Artificial. Arlindo Oliveira
 Inteligência Artificial Arlindo Oliveira Modern Artificial Intelligence Artificial Intelligence Data Analysis Machine Learning Knowledge Representation Search and Optimization Sales and marketing Process
Inteligência Artificial Arlindo Oliveira Modern Artificial Intelligence Artificial Intelligence Data Analysis Machine Learning Knowledge Representation Search and Optimization Sales and marketing Process
Abstract. Most OCR systems decompose the process into several stages:
 Artificial Neural Network Based On Optical Character Recognition Sameeksha Barve Computer Science Department Jawaharlal Institute of Technology, Khargone (M.P) Abstract The recognition of optical characters
Artificial Neural Network Based On Optical Character Recognition Sameeksha Barve Computer Science Department Jawaharlal Institute of Technology, Khargone (M.P) Abstract The recognition of optical characters
DIAGNOSIS OF STATOR FAULT IN ASYNCHRONOUS MACHINE USING SOFT COMPUTING METHODS
 DIAGNOSIS OF STATOR FAULT IN ASYNCHRONOUS MACHINE USING SOFT COMPUTING METHODS K. Vinoth Kumar 1, S. Suresh Kumar 2, A. Immanuel Selvakumar 1 and Vicky Jose 1 1 Department of EEE, School of Electrical
DIAGNOSIS OF STATOR FAULT IN ASYNCHRONOUS MACHINE USING SOFT COMPUTING METHODS K. Vinoth Kumar 1, S. Suresh Kumar 2, A. Immanuel Selvakumar 1 and Vicky Jose 1 1 Department of EEE, School of Electrical
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
45 Graduate School of Informatics
 45 Graduate School of Informatics Graduate School of Informatics 46 Department of Systems Science New Frontier in Informatics and Systems 47 Graduate School of Informatics Divisions and Groups Graduate
45 Graduate School of Informatics Graduate School of Informatics 46 Department of Systems Science New Frontier in Informatics and Systems 47 Graduate School of Informatics Divisions and Groups Graduate
Learning Algorithms for Servomechanism Time Suboptimal Control
 Learning Algorithms for Servomechanism Time Suboptimal Control M. Alexik Department of Technical Cybernetics, University of Zilina, Univerzitna 85/, 6 Zilina, Slovakia mikulas.alexik@fri.uniza.sk, ABSTRACT
Learning Algorithms for Servomechanism Time Suboptimal Control M. Alexik Department of Technical Cybernetics, University of Zilina, Univerzitna 85/, 6 Zilina, Slovakia mikulas.alexik@fri.uniza.sk, ABSTRACT
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Biomedical sensors data fusion algorithm for enhancing the efficiency of fault-tolerant systems in case of wearable electronics device
 Biomedical sensors data fusion algorithm for enhancing the efficiency of fault-tolerant systems in case of wearable electronics device Aileni Raluca Maria 1,2 Sever Pasca 1 Carlos Valderrama 2 1 Faculty
Biomedical sensors data fusion algorithm for enhancing the efficiency of fault-tolerant systems in case of wearable electronics device Aileni Raluca Maria 1,2 Sever Pasca 1 Carlos Valderrama 2 1 Faculty
Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem
 Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem ELAD16 Associate Professor (Docent) KARLSTAD UNIVERSITY Faculty of Technology and Science Department of Physics and
Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem ELAD16 Associate Professor (Docent) KARLSTAD UNIVERSITY Faculty of Technology and Science Department of Physics and
PERFORMANCE PARAMETERS CONTROL OF WOUND ROTOR INDUCTION MOTOR USING ANN CONTROLLER
 PERFORMANCE PARAMETERS CONTROL OF WOUND ROTOR INDUCTION MOTOR USING ANN CONTROLLER 1 A.MOHAMED IBRAHIM, 2 M.PREMKUMAR, 3 T.R.SUMITHIRA, 4 D.SATHISHKUMAR 1,2,4 Assistant professor in Department of Electrical
PERFORMANCE PARAMETERS CONTROL OF WOUND ROTOR INDUCTION MOTOR USING ANN CONTROLLER 1 A.MOHAMED IBRAHIM, 2 M.PREMKUMAR, 3 T.R.SUMITHIRA, 4 D.SATHISHKUMAR 1,2,4 Assistant professor in Department of Electrical
Implementation of Self-adaptive System using the Algorithm of Neural Network Learning Gain
 International Journal Implementation of Control, of Automation, Self-adaptive and System Systems, using vol. the 6, Algorithm no. 3, pp. of 453-459, Neural Network June 2008 Learning Gain 453 Implementation
International Journal Implementation of Control, of Automation, Self-adaptive and System Systems, using vol. the 6, Algorithm no. 3, pp. of 453-459, Neural Network June 2008 Learning Gain 453 Implementation
Development of an Intelligent Agent based Manufacturing System
 Development of an Intelligent Agent based Manufacturing System Hong-Seok Park 1 and Ngoc-Hien Tran 2 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan 680-749, South Korea 2
Development of an Intelligent Agent based Manufacturing System Hong-Seok Park 1 and Ngoc-Hien Tran 2 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan 680-749, South Korea 2
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Key-Words: - Neural Networks, Cerebellum, Cerebellar Model Articulation Controller (CMAC), Auto-pilot
, Auto-pilot") erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
Development of the Mechatronics Design course
 WELCOME TO THE PRESENTATION --------------------------------------------------------- Development of the Mechatronics Design course Dr. A. Mazid Monash University E-mail: Abdul.Mazid@eng.monash.edu.au
WELCOME TO THE PRESENTATION --------------------------------------------------------- Development of the Mechatronics Design course Dr. A. Mazid Monash University E-mail: Abdul.Mazid@eng.monash.edu.au
A Numerical Approach to Understanding Oscillator Neural Networks
 A Numerical Approach to Understanding Oscillator Neural Networks Natalie Klein Mentored by Jon Wilkins Networks of coupled oscillators are a form of dynamical network originally inspired by various biological
A Numerical Approach to Understanding Oscillator Neural Networks Natalie Klein Mentored by Jon Wilkins Networks of coupled oscillators are a form of dynamical network originally inspired by various biological
Dynamic Throttle Estimation by Machine Learning from Professionals
 Dynamic Throttle Estimation by Machine Learning from Professionals Nathan Spielberg and John Alsterda Department of Mechanical Engineering, Stanford University Abstract To increase the capabilities of
Dynamic Throttle Estimation by Machine Learning from Professionals Nathan Spielberg and John Alsterda Department of Mechanical Engineering, Stanford University Abstract To increase the capabilities of
Space Craft Power System Implementation using Neural Network
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Savithra B. 1, Ajay M. P. 2 1 (Masters in VLSI Design, Sri Shakthi Institute of Engineering and Technology, India) 2 (Department
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Savithra B. 1, Ajay M. P. 2 1 (Masters in VLSI Design, Sri Shakthi Institute of Engineering and Technology, India) 2 (Department
Artificial Intelligence. What is AI?
 2 Artificial Intelligence What is AI? Some Definitions of AI The scientific understanding of the mechanisms underlying thought and intelligent behavior and their embodiment in machines American Association
2 Artificial Intelligence What is AI? Some Definitions of AI The scientific understanding of the mechanisms underlying thought and intelligent behavior and their embodiment in machines American Association
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Institute of Computer Technology
 1 Faculty of Informatics Faculty of Mechanical and Industrial Engineering Faculty of Electrical Engineering and Information Technology 8 Institute of Fundamentals and Theory of Electrical Engineering Institute
1 Faculty of Informatics Faculty of Mechanical and Industrial Engineering Faculty of Electrical Engineering and Information Technology 8 Institute of Fundamentals and Theory of Electrical Engineering Institute
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Control Systems Overview REV II
 Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
NATIONAL CERTIFICATE (VOCATIONAL) NQF LEVEL 4 NOVEMBER
 NQF LEVEL 4 NOVEMBER") MARKING GUIDELINE NATIONAL CERTIFICATE (VOCATIONAL) NQF LEVEL 4 NOVEMBER 2009 This memorandum consists of 11 pages. (MARKING GUIDELINE) -2- NC1920(E)(N25)V QUESTION 1: ENGINEERING PROFESSION 1.1 Bio fuels
MARKING GUIDELINE NATIONAL CERTIFICATE (VOCATIONAL) NQF LEVEL 4 NOVEMBER 2009 This memorandum consists of 11 pages. (MARKING GUIDELINE) -2- NC1920(E)(N25)V QUESTION 1: ENGINEERING PROFESSION 1.1 Bio fuels
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
Application Of Artificial Neural Network In Fault Detection Of Hvdc Converter
 Application Of Artificial Neural Network In Fault Detection Of Hvdc Converter Madhuri S Shastrakar Department of Electrical Engineering, Shree Ramdeobaba College of Engineering and Management, Nagpur,
Application Of Artificial Neural Network In Fault Detection Of Hvdc Converter Madhuri S Shastrakar Department of Electrical Engineering, Shree Ramdeobaba College of Engineering and Management, Nagpur,
A New Localization Algorithm Based on Taylor Series Expansion for NLOS Environment
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 5 Special Issue on Application of Advanced Computing and Simulation in Information Systems Sofia 016 Print ISSN: 1311-970;
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 5 Special Issue on Application of Advanced Computing and Simulation in Information Systems Sofia 016 Print ISSN: 1311-970;
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC)
 and Soft Computing (SC)") Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
FAULT DETECTION AND DIAGNOSIS OF HIGH SPEED SWITCHING DEVICES IN POWER INVERTER
 FAULT DETECTION AND DIAGNOSIS OF HIGH SPEED SWITCHING DEVICES IN POWER INVERTER R. B. Dhumale 1, S. D. Lokhande 2, N. D. Thombare 3, M. P. Ghatule 4 1 Department of Electronics and Telecommunication Engineering,
FAULT DETECTION AND DIAGNOSIS OF HIGH SPEED SWITCHING DEVICES IN POWER INVERTER R. B. Dhumale 1, S. D. Lokhande 2, N. D. Thombare 3, M. P. Ghatule 4 1 Department of Electronics and Telecommunication Engineering,
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
SMARTPHONE SENSOR BASED GESTURE RECOGNITION LIBRARY
 SMARTPHONE SENSOR BASED GESTURE RECOGNITION LIBRARY Sidhesh Badrinarayan 1, Saurabh Abhale 2 1,2 Department of Information Technology, Pune Institute of Computer Technology, Pune, India ABSTRACT: Gestures
SMARTPHONE SENSOR BASED GESTURE RECOGNITION LIBRARY Sidhesh Badrinarayan 1, Saurabh Abhale 2 1,2 Department of Information Technology, Pune Institute of Computer Technology, Pune, India ABSTRACT: Gestures