Evolutionary robotics Jørgen Nordmoen
|
|
|
- Annis Barrett
- 5 years ago
- Views:
Transcription

1 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette
2 Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating examples ROBIN in-house robotic platforms and experiments Research challenges Reality gap 2
3 Machine intelligence in robotics Sensing, vision Gather information about the world and represent it internally for further processing Control and planning Low-level control Path planning (arms and mobile robots)* Task planning Design Robot body shape / structure 3


4 Example: Henriette 4

5 Current robots 5



6 Future scenarios 6

7 Future robots 7
8 Why evolutionary robotics? Adaptation to changes in environment or robot Robot may break or deteriorate Environment may change unexpectedly Optimizing for efficiency Energy, speed weight, actuators Unconventional, complex designs New materials and actuators make it more challenging with conventional design approaches Adaptation, optimization, exploration 8
9 Henriette: Parameterized control Walking pattern coded into bit strings. 3 states consisting of leg configuration and pause length An evolutionary algorithm was used to evolve the leg configurations and the pause length. For each leg configuration, 4 bits denote the position of 4 actuators, 6 bits denote the length of the pause. Total bit string / genome length: 30 bits 9
10 Evolutionary Algorithm (EA) Initialize random population Evaluate individuals Create new population from good individuals Termination criterion reached? no yes Verify and apply solution(s) 10
11 Evolutionary mechanisms Selection Good / fit individuals have a higher chance of reproducing Inheritance Properties from parents are transferred to offspring Variation Changes in the genome adjust the behavior of the offspring, sometimes to the better 11
12 Selection Each individual in a population is evaluated and assigned a fitness value, ie. a measure of how a solution performs a given task Example: The forward speed of a robot Henriette: measured by the angular difference from the rotation encoder over 3 repetitions of the sequence The probability of an individual being selected for reproduction is proportional to its fitness value (randomness is present) 12
13 Inheritance + variation parent 1 parent 2 child 13
14 Without bio-terminology, what is an EA? A population-based stochastic search algorithm Searching for satisfactory solutions in a solution space of all possible solutions Searches in «parallel» on a population of solutions Black-box: does not assume knowledge about the problem (but the results depend on the mapping and fitness function) Can handle large search spaces with complex fitness landscape Less chance of being stuck in local optima Can give unexpected results 14
15 Simulation Evolution on a real robot is impractical Time consuming Requires supervision: can get stuck, fall over Mechanical wear Simulation should help Allows automated evaluation Can be much faster especially with parallel computation 15

16 Example: Quadratot 16


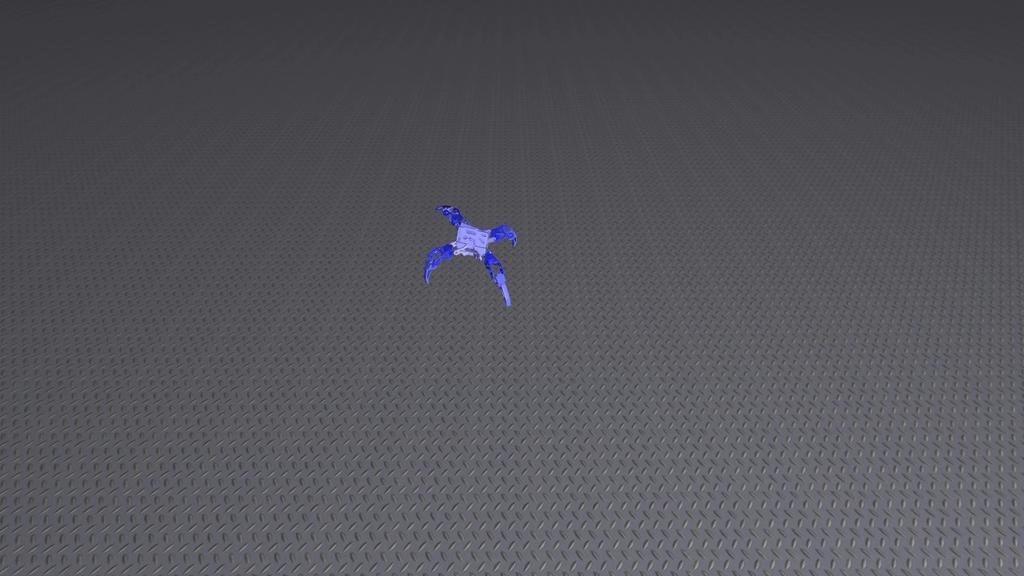
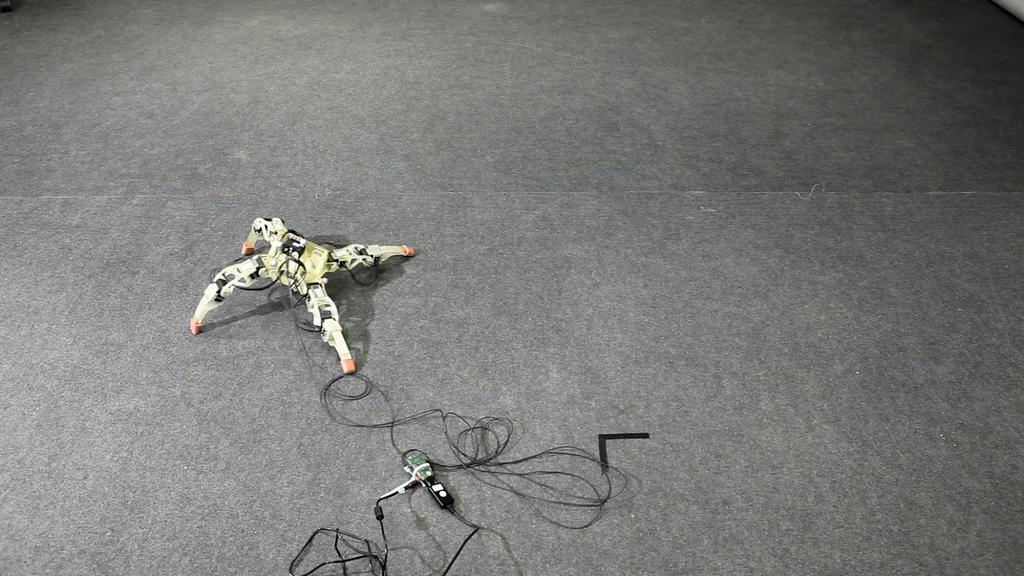
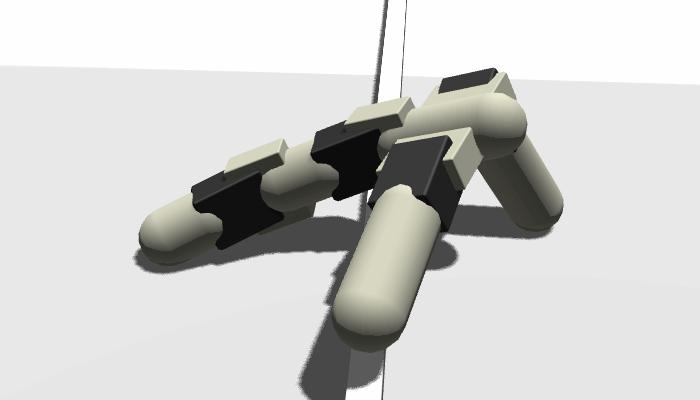
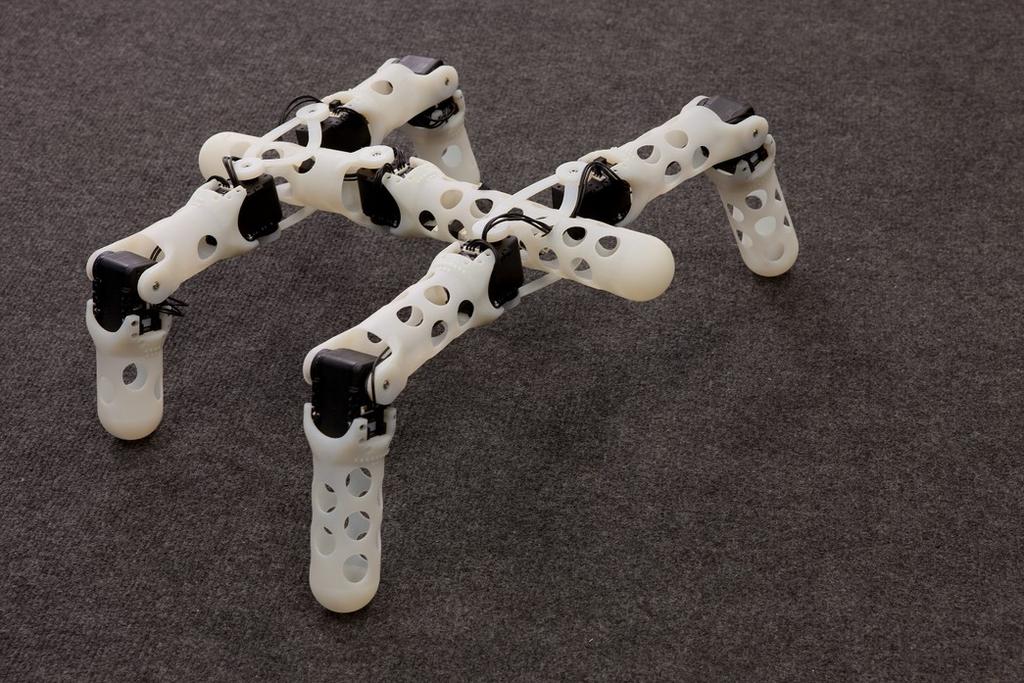
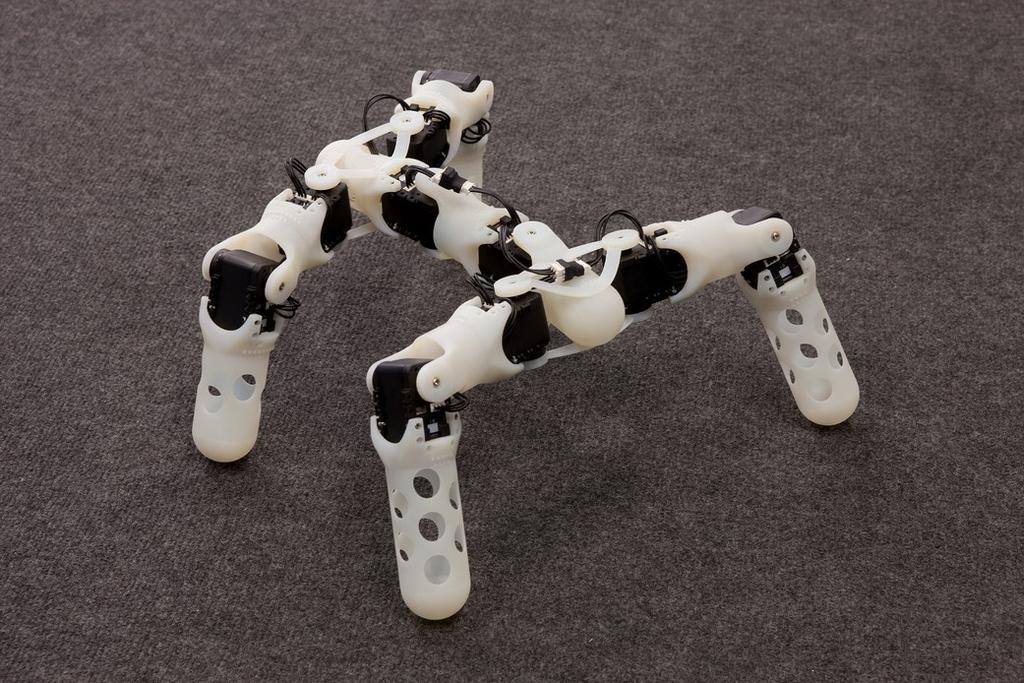
17 Quadratot: Hardware and model (DEMO) 3D printed parts AX12/18 servos Silicone rubber socks NVIDIA PhysX Revolute motor joints Rigid bodies (boxes) 17
 For each")
 Phase Amplitude Center")
18 Quadratot: Parameterized control (mapping) For each joint: Curve shape parameters (4) Phase Amplitude Center angle 18
19 Quadratot: Genetic algorithm (GA) Evaluate individuals (simulator) Initialize random population Create new population from good individuals Genome length 314 bits Population size 200 Number of generations 300 Mutation rate 1/314 Crossover rate x 300 = tests per evolutionary run! Termination criterion reached? no yes Verify solution(s) on robot 19


20 Motion capture 20
21 Quadratot: Evolved gait 21
22 Benefits of simulation 22
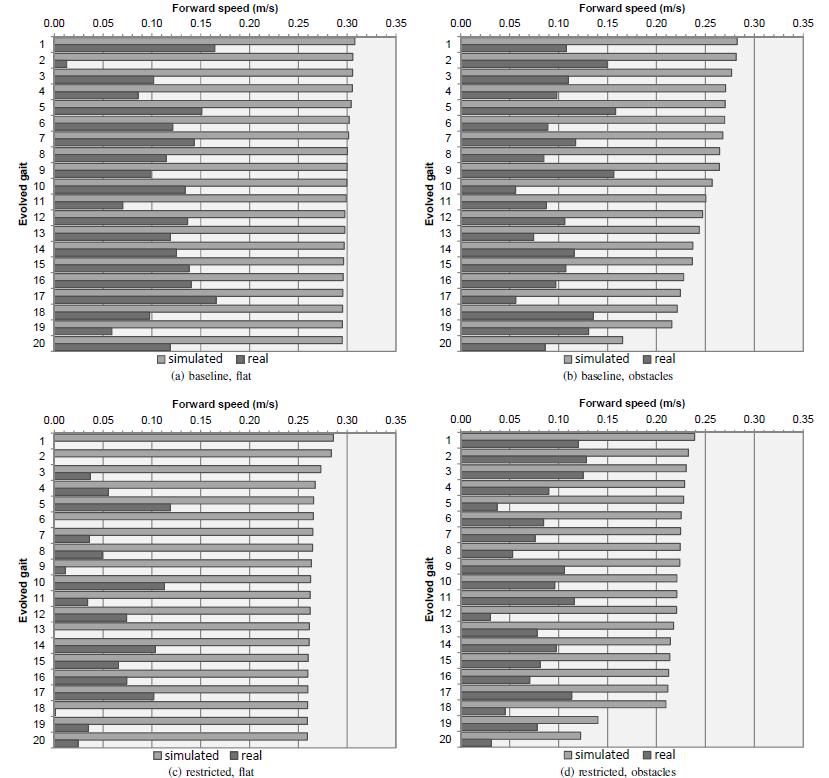
23 Challenge: Reality gap A simulator cannot capture all aspects of reality Evolved solutions may exploit features of the simulator not present in reality The solutions evolved in simulation behave differently when applied to the real robot! 23
24 Quadratot: Reality gap 24
25 How to deal with the reality gap? Ideas? 25
26 How to deal with the reality gap 1. Increase simulation fidelity Manually: do more precise measurements, increase solver accuracy Automatically: measure deviation simulation-reality, autotune simulator for smaller deviation 2. Do not allow for solutions using badly simulated behaviour Manually: E.g. Encourage slow, static movements, add noise Automatically: Avoid solution types that transfer poorly 3. Online learning after deployment on real robot Can use more evolution, reinforcement learning, or other method 26
27 1. Automatic simulator tuning Sample from real world Test selected solutions on real robot Tune (evolve) simulator to fit all samples Evolve new solutions using tuned simulator 27
 Creates self-model through exploratory actions Uses evolution to search for walking pattern using selfmodel If")
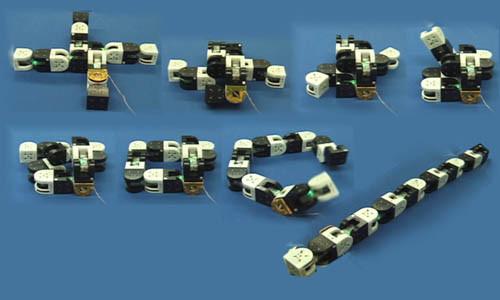
28 Self-modeling robot (Cornell U.) Creates self-model through exploratory actions Uses evolution to search for walking pattern using selfmodel If the robot is broken, a new selfmodel is constructed 28
 11.")
29 Transferability (UPMC, Paris) 11. april 2011 Ny Powerpoint mal
30 3. Adaptation after transferral Reality gap is «accepted» Adaptation algorithm is carried out on the real robot Needs to take into account fewer tests and more noise 30



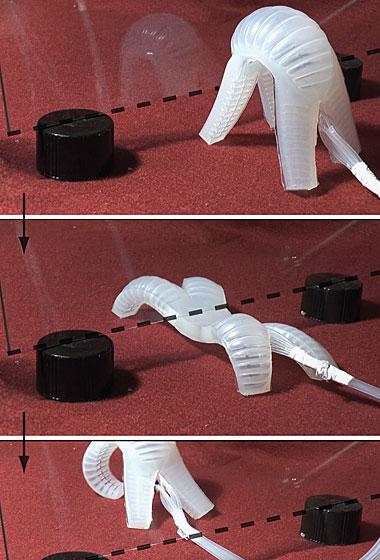
31 Evolving shape and control Physics simulation allows evolution of shape and control simultaneously More efficient designs for complex problems? New designs for new environments? Allows for offloading computation to the body? Sims: GOLEM: Soft robot: 31

32 Example: «hox» body evolution Generative approach A program builds the robot plan rather than all parameters directly coded Allows a variety of bodies from a compact code Designed for production with 3D printer and commercial servos 32

")
33 «hox»: Some results (video) 33

34 Results: different bodies 34



35 35
36 Summary Evolutionary robotics can be useful for adaptation, optimization, design exploration Simulation is useful for evolutionary search The reality gap remains a research challenge Simulator tuning, transferability, online adaptation Co-evolution of body and control gives new possibilities 36
37 Master s thesis in robotics and intelligent systems (ROBIN group) Many possible topics FPGA Rapid prototyping Machine learning Intelligent, evolutionary and adaptive robots Medical robotics and robotics in health care Music technology Possible collaboration with external partners Perfect background for current and future industry 37


 Reality gap research (testing various algorithms for a")
 http://www.mn.uio.")
38 Master s projects in evolutionary robotics at the ROBIN group Integration of locomotion learning platform (evolutionary algorithm + simulator + hardware interface + sensing) Evolution of locomotion patterns for robots (walking, crawling, obstacles, adaptivity, robustness, neural networks,...) Reality gap research (testing various algorithms for a smooth transfer from simulator to reality) Design and build new robot (CAD, 3D print, electronics, simulator) 38



39 Example MSc project: Karkinos Hybrid automatic / engineered design of robot shape and control 39


40 Example MSc project: Reality gap 40

41 Example gait 41


42 Relevant courses INF3490 Biologically inspired computing INF4500 Rapid prototyping of robotic systems 42
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Available online at ScienceDirect. Procedia Computer Science 24 (2013 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Master thesis UNIVERSITY OF OSLO. Locomotion for a Quadruped Robot using Physics Simulation and Real-World Verification. Thomas Hoel Grefsrud
 UNIVERSITY OF OSLO Department of informatics Evolving Multi-Directional Locomotion for a Quadruped Robot using Physics Simulation and Real-World Verification Master thesis Thomas Hoel Grefsrud 1. August
UNIVERSITY OF OSLO Department of informatics Evolving Multi-Directional Locomotion for a Quadruped Robot using Physics Simulation and Real-World Verification Master thesis Thomas Hoel Grefsrud 1. August
Body articulation Obstacle sensor00
 Leonardo and Discipulus Simplex: An Autonomous, Evolvable Six-Legged Walking Robot Gilles Ritter, Jean-Michel Puiatti, and Eduardo Sanchez Logic Systems Laboratory, Swiss Federal Institute of Technology,
Leonardo and Discipulus Simplex: An Autonomous, Evolvable Six-Legged Walking Robot Gilles Ritter, Jean-Michel Puiatti, and Eduardo Sanchez Logic Systems Laboratory, Swiss Federal Institute of Technology,
Position Control of Servo Systems using PID Controller Tuning with Soft Computing Optimization Techniques
 Position Control of Servo Systems using PID Controller Tuning with Soft Computing Optimization Techniques P. Ravi Kumar M.Tech (control systems) Gudlavalleru engineering college Gudlavalleru,Andhra Pradesh,india
Position Control of Servo Systems using PID Controller Tuning with Soft Computing Optimization Techniques P. Ravi Kumar M.Tech (control systems) Gudlavalleru engineering college Gudlavalleru,Andhra Pradesh,india
CPS331 Lecture: Genetic Algorithms last revised October 28, 2016
 CPS331 Lecture: Genetic Algorithms last revised October 28, 2016 Objectives: 1. To explain the basic ideas of GA/GP: evolution of a population; fitness, crossover, mutation Materials: 1. Genetic NIM learner
CPS331 Lecture: Genetic Algorithms last revised October 28, 2016 Objectives: 1. To explain the basic ideas of GA/GP: evolution of a population; fitness, crossover, mutation Materials: 1. Genetic NIM learner
Automating a Solution for Optimum PTP Deployment
 Automating a Solution for Optimum PTP Deployment ITSF 2015 David O Connor Bridge Worx in Sync Sync Architect V4: Sync planning & diagnostic tool. Evaluates physical layer synchronisation distribution by
Automating a Solution for Optimum PTP Deployment ITSF 2015 David O Connor Bridge Worx in Sync Sync Architect V4: Sync planning & diagnostic tool. Evaluates physical layer synchronisation distribution by
THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS
 THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS Shanker G R Prabhu*, Richard Seals^ University of Greenwich Dept. of Engineering Science Chatham, Kent, UK, ME4 4TB. +44 (0) 1634 88
THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS Shanker G R Prabhu*, Richard Seals^ University of Greenwich Dept. of Engineering Science Chatham, Kent, UK, ME4 4TB. +44 (0) 1634 88
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Bio-inspired Computing for Robots and Music. Jim Tørresen Research group Robotics and Intelligent Systems
 Bio-inspired Computing for Robots and Music Jim Tørresen Research group Robotics and Intelligent Systems Robotics and Intelligent Systems group Systems operate in dynamic environments demanding adaptation
Bio-inspired Computing for Robots and Music Jim Tørresen Research group Robotics and Intelligent Systems Robotics and Intelligent Systems group Systems operate in dynamic environments demanding adaptation
Evolutionary Computation and Machine Intelligence
 Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Biologically Inspired Embodied Evolution of Survival
 Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem
 A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem K.. enthilkumar and K. K. Bharadwaj Abstract - Robot Path Exploration problem or Robot Motion planning problem is one of the famous
A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem K.. enthilkumar and K. K. Bharadwaj Abstract - Robot Path Exploration problem or Robot Motion planning problem is one of the famous
Behavior-based robotics, and Evolutionary robotics
 Behavior-based robotics, and Evolutionary robotics Lecture 7 2008-02-12 Contents Part I: Behavior-based robotics: Generating robot behaviors. MW p. 39-52. Part II: Evolutionary robotics: Evolving basic
Behavior-based robotics, and Evolutionary robotics Lecture 7 2008-02-12 Contents Part I: Behavior-based robotics: Generating robot behaviors. MW p. 39-52. Part II: Evolutionary robotics: Evolving basic
Aracna: An Open-Source Quadruped Platform for Evolutionary Robotics
 Sara Lohmann, Jason Yosinski, Eric Gold, Jeff Clune, Jeremy Blum and Hod Lipson Cornell University, 239 Upson Hall, Ithaca, NY 14853 sml253@cornell.edu, yosinski@cs.cornell.edu Abstract We describe a new,
Sara Lohmann, Jason Yosinski, Eric Gold, Jeff Clune, Jeremy Blum and Hod Lipson Cornell University, 239 Upson Hall, Ithaca, NY 14853 sml253@cornell.edu, yosinski@cs.cornell.edu Abstract We describe a new,
A Review on Genetic Algorithm and Its Applications
 2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Review on Genetic Algorithm and Its Applications Anju Bala Research Scholar, Department
2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Review on Genetic Algorithm and Its Applications Anju Bala Research Scholar, Department
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms
 Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, :23 PM
 APRIL 3, :23 PM") 1,2 Guest Machines are becoming more creative than humans RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, 2016 12:23 PM TAGS: ARTIFICIAL INTELLIGENCE
1,2 Guest Machines are becoming more creative than humans RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, 2016 12:23 PM TAGS: ARTIFICIAL INTELLIGENCE
Bio-inspired Computing for Robots and Music. Jim Tørresen Research group Robotics and Intelligent Systems
 Bio-inspired Computing for Robots and Music Jim Tørresen Research group Robotics and Intelligent Systems Robotics and Intelligent Systems (ROBIN) Jim Tørresen Professor, Group leader Mats Høvin Assoc.
Bio-inspired Computing for Robots and Music Jim Tørresen Research group Robotics and Intelligent Systems Robotics and Intelligent Systems (ROBIN) Jim Tørresen Professor, Group leader Mats Høvin Assoc.
ECE 517: Reinforcement Learning in Artificial Intelligence
 ECE 517: Reinforcement Learning in Artificial Intelligence Lecture 17: Case Studies and Gradient Policy October 29, 2015 Dr. Itamar Arel College of Engineering Department of Electrical Engineering and
ECE 517: Reinforcement Learning in Artificial Intelligence Lecture 17: Case Studies and Gradient Policy October 29, 2015 Dr. Itamar Arel College of Engineering Department of Electrical Engineering and
Enhancing Embodied Evolution with Punctuated Anytime Learning
 Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Evolutions of communication
 Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Capstone Python Project Features
 Capstone Python Project Features CSSE 120, Introduction to Software Development General instructions: The following assumes a 3-person team. If you are a 2-person team, see your instructor for how to deal
Capstone Python Project Features CSSE 120, Introduction to Software Development General instructions: The following assumes a 3-person team. If you are a 2-person team, see your instructor for how to deal
Chapter 5 OPTIMIZATION OF BOW TIE ANTENNA USING GENETIC ALGORITHM
 Chapter 5 OPTIMIZATION OF BOW TIE ANTENNA USING GENETIC ALGORITHM 5.1 Introduction This chapter focuses on the use of an optimization technique known as genetic algorithm to optimize the dimensions of
Chapter 5 OPTIMIZATION OF BOW TIE ANTENNA USING GENETIC ALGORITHM 5.1 Introduction This chapter focuses on the use of an optimization technique known as genetic algorithm to optimize the dimensions of
Evolution of Sensor Suites for Complex Environments
 Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
Computational Intelligence Optimization
 Computational Intelligence Optimization Ferrante Neri Department of Mathematical Information Technology, University of Jyväskylä 12.09.2011 1 What is Optimization? 2 What is a fitness landscape? 3 Features
Computational Intelligence Optimization Ferrante Neri Department of Mathematical Information Technology, University of Jyväskylä 12.09.2011 1 What is Optimization? 2 What is a fitness landscape? 3 Features
Evolutionary Electronics
 Evolutionary Electronics 1 Introduction Evolutionary Electronics (EE) is defined as the application of evolutionary techniques to the design (synthesis) of electronic circuits Evolutionary algorithm (schematic)
Evolutionary Electronics 1 Introduction Evolutionary Electronics (EE) is defined as the application of evolutionary techniques to the design (synthesis) of electronic circuits Evolutionary algorithm (schematic)
GENETIC PROGRAMMING. In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased
 is an evolutionary algorithmbased") GENETIC PROGRAMMING Definition In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased methodology inspired by biological evolution to find computer programs that perform
GENETIC PROGRAMMING Definition In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased methodology inspired by biological evolution to find computer programs that perform
NUMERICAL SIMULATION OF SELF-STRUCTURING ANTENNAS BASED ON A GENETIC ALGORITHM OPTIMIZATION SCHEME
 NUMERICAL SIMULATION OF SELF-STRUCTURING ANTENNAS BASED ON A GENETIC ALGORITHM OPTIMIZATION SCHEME J.E. Ross * John Ross & Associates 350 W 800 N, Suite 317 Salt Lake City, UT 84103 E.J. Rothwell, C.M.
NUMERICAL SIMULATION OF SELF-STRUCTURING ANTENNAS BASED ON A GENETIC ALGORITHM OPTIMIZATION SCHEME J.E. Ross * John Ross & Associates 350 W 800 N, Suite 317 Salt Lake City, UT 84103 E.J. Rothwell, C.M.
Evolutionary Robotics. IAR Lecture 13 Barbara Webb
 Evolutionary Robotics IAR Lecture 13 Barbara Webb Basic process Population of genomes, e.g. binary strings, tree structures Produce new set of genomes, e.g. breed, crossover, mutate Use fitness to select
Evolutionary Robotics IAR Lecture 13 Barbara Webb Basic process Population of genomes, e.g. binary strings, tree structures Produce new set of genomes, e.g. breed, crossover, mutate Use fitness to select
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems
 A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
LANDSCAPE SMOOTHING OF NUMERICAL PERMUTATION SPACES IN GENETIC ALGORITHMS
 LANDSCAPE SMOOTHING OF NUMERICAL PERMUTATION SPACES IN GENETIC ALGORITHMS ABSTRACT The recent popularity of genetic algorithms (GA s) and their application to a wide range of problems is a result of their
LANDSCAPE SMOOTHING OF NUMERICAL PERMUTATION SPACES IN GENETIC ALGORITHMS ABSTRACT The recent popularity of genetic algorithms (GA s) and their application to a wide range of problems is a result of their
Sp-eed Control of Brushless DC Motor Using Genetic Algorithim Based Fuzzy Controller*
 Proceedings of the 2004 nternational Conference on ntelligent Mechatronics and Automation Chengdu,China August 2004 Sp-eed Control of Brushless DC Motor Using Genetic Algorithim Based Fuzzy Controller*
Proceedings of the 2004 nternational Conference on ntelligent Mechatronics and Automation Chengdu,China August 2004 Sp-eed Control of Brushless DC Motor Using Genetic Algorithim Based Fuzzy Controller*
TJHSST Senior Research Project Evolving Motor Techniques for Artificial Life
 TJHSST Senior Research Project Evolving Motor Techniques for Artificial Life 2007-2008 Kelley Hecker November 2, 2007 Abstract This project simulates evolving virtual creatures in a 3D environment, based
TJHSST Senior Research Project Evolving Motor Techniques for Artificial Life 2007-2008 Kelley Hecker November 2, 2007 Abstract This project simulates evolving virtual creatures in a 3D environment, based
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Synthetic Brains: Update
 Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
Multi-objective Optimization Inspired by Nature
 Evolutionary algorithms Multi-objective Optimization Inspired by Nature Jürgen Branke Institute AIFB University of Karlsruhe, Germany Karlsruhe Institute of Technology Darwin s principle of natural evolution:
Evolutionary algorithms Multi-objective Optimization Inspired by Nature Jürgen Branke Institute AIFB University of Karlsruhe, Germany Karlsruhe Institute of Technology Darwin s principle of natural evolution:
CHAPTER 3 HARMONIC ELIMINATION SOLUTION USING GENETIC ALGORITHM
 61 CHAPTER 3 HARMONIC ELIMINATION SOLUTION USING GENETIC ALGORITHM 3.1 INTRODUCTION Recent advances in computation, and the search for better results for complex optimization problems, have stimulated
61 CHAPTER 3 HARMONIC ELIMINATION SOLUTION USING GENETIC ALGORITHM 3.1 INTRODUCTION Recent advances in computation, and the search for better results for complex optimization problems, have stimulated
Genetic Programming of Autonomous Agents. Senior Project Proposal. Scott O'Dell. Advisors: Dr. Joel Schipper and Dr. Arnold Patton
 Genetic Programming of Autonomous Agents Senior Project Proposal Scott O'Dell Advisors: Dr. Joel Schipper and Dr. Arnold Patton December 9, 2010 GPAA 1 Introduction to Genetic Programming Genetic programming
Genetic Programming of Autonomous Agents Senior Project Proposal Scott O'Dell Advisors: Dr. Joel Schipper and Dr. Arnold Patton December 9, 2010 GPAA 1 Introduction to Genetic Programming Genetic programming
Automated Damage Diagnosis and Recovery for Remote Robotics
 Automated Damage Diagnosis and Recovery for Remote Robotics Josh C. Bongard Hod Lipson Sibley School of Mechanical and Aerospace Engineering Cornell University, Ithaca, New York 148 Email: [JB382 HL274]@cornell.edu
Automated Damage Diagnosis and Recovery for Remote Robotics Josh C. Bongard Hod Lipson Sibley School of Mechanical and Aerospace Engineering Cornell University, Ithaca, New York 148 Email: [JB382 HL274]@cornell.edu
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Mehrdad Amirghasemi a* Reza Zamani a
 The roles of evolutionary computation, fitness landscape, constructive methods and local searches in the development of adaptive systems for infrastructure planning Mehrdad Amirghasemi a* Reza Zamani a
The roles of evolutionary computation, fitness landscape, constructive methods and local searches in the development of adaptive systems for infrastructure planning Mehrdad Amirghasemi a* Reza Zamani a
The Behavior Evolving Model and Application of Virtual Robots
 The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
Review of Soft Computing Techniques used in Robotics Application
 International Journal of Information and Computation Technology. ISSN 0974-2239 Volume 3, Number 3 (2013), pp. 101-106 International Research Publications House http://www. irphouse.com /ijict.htm Review
International Journal of Information and Computation Technology. ISSN 0974-2239 Volume 3, Number 3 (2013), pp. 101-106 International Research Publications House http://www. irphouse.com /ijict.htm Review
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
EvoCAD: Evolution-Assisted Design
 EvoCAD: Evolution-Assisted Design Pablo Funes, Louis Lapat and Jordan B. Pollack Brandeis University Department of Computer Science 45 South St., Waltham MA 02454 USA Since 996 we have been conducting
EvoCAD: Evolution-Assisted Design Pablo Funes, Louis Lapat and Jordan B. Pollack Brandeis University Department of Computer Science 45 South St., Waltham MA 02454 USA Since 996 we have been conducting
Adaptive Humanoid Robot Arm Motion Generation by Evolved Neural Controllers
 Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots
 Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
A comparison of a genetic algorithm and a depth first search algorithm applied to Japanese nonograms
 A comparison of a genetic algorithm and a depth first search algorithm applied to Japanese nonograms Wouter Wiggers Faculty of EECMS, University of Twente w.a.wiggers@student.utwente.nl ABSTRACT In this
A comparison of a genetic algorithm and a depth first search algorithm applied to Japanese nonograms Wouter Wiggers Faculty of EECMS, University of Twente w.a.wiggers@student.utwente.nl ABSTRACT In this
The Open Access Institutional Repository at Robert Gordon University
 OpenAIR@RGU The Open Access Institutional Repository at Robert Gordon University http://openair.rgu.ac.uk This is an author produced version of a paper published in Electronics World (ISSN 0959-8332) This
OpenAIR@RGU The Open Access Institutional Repository at Robert Gordon University http://openair.rgu.ac.uk This is an author produced version of a paper published in Electronics World (ISSN 0959-8332) This
Online Evolution for Cooperative Behavior in Group Robot Systems
 282 International Dong-Wook Journal of Lee, Control, Sang-Wook Automation, Seo, and Systems, Kwee-Bo vol. Sim 6, no. 2, pp. 282-287, April 2008 Online Evolution for Cooperative Behavior in Group Robot
282 International Dong-Wook Journal of Lee, Control, Sang-Wook Automation, Seo, and Systems, Kwee-Bo vol. Sim 6, no. 2, pp. 282-287, April 2008 Online Evolution for Cooperative Behavior in Group Robot
An Evolutionary Approach to the Synthesis of Combinational Circuits
 An Evolutionary Approach to the Synthesis of Combinational Circuits Cecília Reis Institute of Engineering of Porto Polytechnic Institute of Porto Rua Dr. António Bernardino de Almeida, 4200-072 Porto Portugal
An Evolutionary Approach to the Synthesis of Combinational Circuits Cecília Reis Institute of Engineering of Porto Polytechnic Institute of Porto Rua Dr. António Bernardino de Almeida, 4200-072 Porto Portugal
Differential Evolution and Genetic Algorithm Based MPPT Controller for Photovoltaic System
 Differential Evolution and Genetic Algorithm Based MPPT Controller for Photovoltaic System Nishtha Bhagat 1, Praniti Durgapal 2, Prerna Gaur 3 Instrumentation and Control Engineering, Netaji Subhas Institute
Differential Evolution and Genetic Algorithm Based MPPT Controller for Photovoltaic System Nishtha Bhagat 1, Praniti Durgapal 2, Prerna Gaur 3 Instrumentation and Control Engineering, Netaji Subhas Institute
Printer Model + Genetic Algorithm = Halftone Masks
 Printer Model + Genetic Algorithm = Halftone Masks Peter G. Anderson, Jonathan S. Arney, Sunadi Gunawan, Kenneth Stephens Laboratory for Applied Computing Rochester Institute of Technology Rochester, New
Printer Model + Genetic Algorithm = Halftone Masks Peter G. Anderson, Jonathan S. Arney, Sunadi Gunawan, Kenneth Stephens Laboratory for Applied Computing Rochester Institute of Technology Rochester, New
Load Frequency Controller Design for Interconnected Electric Power System
 Load Frequency Controller Design for Interconnected Electric Power System M. A. Tammam** M. A. S. Aboelela* M. A. Moustafa* A. E. A. Seif* * Department of Electrical Power and Machines, Faculty of Engineering,
Load Frequency Controller Design for Interconnected Electric Power System M. A. Tammam** M. A. S. Aboelela* M. A. Moustafa* A. E. A. Seif* * Department of Electrical Power and Machines, Faculty of Engineering,
Evolution of Efficient Gait with Humanoids Using Visual Feedback
 Evolution of Efficient Gait with Humanoids Using Visual Feedback Krister Wolff and Peter Nordin Department of Physical Resource Theory, Complex Systems Group Chalmers University of Technology and Göteborg
Evolution of Efficient Gait with Humanoids Using Visual Feedback Krister Wolff and Peter Nordin Department of Physical Resource Theory, Complex Systems Group Chalmers University of Technology and Göteborg
Fault Location Using Sparse Wide Area Measurements
 319 Study Committee B5 Colloquium October 19-24, 2009 Jeju Island, Korea Fault Location Using Sparse Wide Area Measurements KEZUNOVIC, M., DUTTA, P. (Texas A & M University, USA) Summary Transmission line
319 Study Committee B5 Colloquium October 19-24, 2009 Jeju Island, Korea Fault Location Using Sparse Wide Area Measurements KEZUNOVIC, M., DUTTA, P. (Texas A & M University, USA) Summary Transmission line
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters
 Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Online Interactive Neuro-evolution
 Appears in Neural Processing Letters, 1999. Online Interactive Neuro-evolution Adrian Agogino (agogino@ece.utexas.edu) Kenneth Stanley (kstanley@cs.utexas.edu) Risto Miikkulainen (risto@cs.utexas.edu)
Appears in Neural Processing Letters, 1999. Online Interactive Neuro-evolution Adrian Agogino (agogino@ece.utexas.edu) Kenneth Stanley (kstanley@cs.utexas.edu) Risto Miikkulainen (risto@cs.utexas.edu)
Retaining Learned Behavior During Real-Time Neuroevolution
 Retaining Learned Behavior During Real-Time Neuroevolution Thomas D Silva, Roy Janik, Michael Chrien, Kenneth O. Stanley and Risto Miikkulainen Department of Computer Sciences University of Texas at Austin
Retaining Learned Behavior During Real-Time Neuroevolution Thomas D Silva, Roy Janik, Michael Chrien, Kenneth O. Stanley and Risto Miikkulainen Department of Computer Sciences University of Texas at Austin
Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
The Genetic Algorithm
 The Genetic Algorithm The Genetic Algorithm, (GA) is finding increasing applications in electromagnetics including antenna design. In this lesson we will learn about some of these techniques so you are
The Genetic Algorithm The Genetic Algorithm, (GA) is finding increasing applications in electromagnetics including antenna design. In this lesson we will learn about some of these techniques so you are
Implementation of FPGA based Decision Making Engine and Genetic Algorithm (GA) for Control of Wireless Parameters
 for Control of Wireless Parameters") Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 11, Number 1 (2018) pp. 15-21 Research India Publications http://www.ripublication.com Implementation of FPGA based Decision Making
Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 11, Number 1 (2018) pp. 15-21 Research India Publications http://www.ripublication.com Implementation of FPGA based Decision Making
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
SECTOR SYNTHESIS OF ANTENNA ARRAY USING GENETIC ALGORITHM
 2005-2008 JATIT. All rights reserved. SECTOR SYNTHESIS OF ANTENNA ARRAY USING GENETIC ALGORITHM 1 Abdelaziz A. Abdelaziz and 2 Hanan A. Kamal 1 Assoc. Prof., Department of Electrical Engineering, Faculty
2005-2008 JATIT. All rights reserved. SECTOR SYNTHESIS OF ANTENNA ARRAY USING GENETIC ALGORITHM 1 Abdelaziz A. Abdelaziz and 2 Hanan A. Kamal 1 Assoc. Prof., Department of Electrical Engineering, Faculty
Optimization of Robot Arm Motion in Human Environment
 Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Co-evolution for Communication: An EHW Approach
 Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
arxiv: v1 [cs.ne] 3 May 2018
![arxiv: v1 [cs.ne] 3 May 2018](/thumbs/86/93513162.jpg "arxiv: v1 [cs.ne] 3 May 2018") VINE: An Open Source Interactive Data Visualization Tool for Neuroevolution Uber AI Labs San Francisco, CA 94103 {ruiwang,jeffclune,kstanley}@uber.com arxiv:1805.01141v1 [cs.ne] 3 May 2018 ABSTRACT Recent
VINE: An Open Source Interactive Data Visualization Tool for Neuroevolution Uber AI Labs San Francisco, CA 94103 {ruiwang,jeffclune,kstanley}@uber.com arxiv:1805.01141v1 [cs.ne] 3 May 2018 ABSTRACT Recent
Learning a Visual Task by Genetic Programming
 Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
A BIOLOGICALLY INSPIRED APPROACH TO FEASIBLE GAIT LEARNING FOR A HEXAPOD ROBOT
 Int. J. Appl. Math. Comput. Sci.,, Vol., No., 69 8 DOI:.78/v6---7 A BIOLOGICALLY INSPIRED APPROACH TO FEASIBLE GAIT LEARNING FOR A HEXAPOD ROBOT DOMINIK BELTER, PIOTR SKRZYPCZYŃSKI Institute of Control
Int. J. Appl. Math. Comput. Sci.,, Vol., No., 69 8 DOI:.78/v6---7 A BIOLOGICALLY INSPIRED APPROACH TO FEASIBLE GAIT LEARNING FOR A HEXAPOD ROBOT DOMINIK BELTER, PIOTR SKRZYPCZYŃSKI Institute of Control
A Novel approach for Optimizing Cross Layer among Physical Layer and MAC Layer of Infrastructure Based Wireless Network using Genetic Algorithm
 A Novel approach for Optimizing Cross Layer among Physical Layer and MAC Layer of Infrastructure Based Wireless Network using Genetic Algorithm Vinay Verma, Savita Shiwani Abstract Cross-layer awareness
A Novel approach for Optimizing Cross Layer among Physical Layer and MAC Layer of Infrastructure Based Wireless Network using Genetic Algorithm Vinay Verma, Savita Shiwani Abstract Cross-layer awareness
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
Research Projects BSc 2013
 Research Projects BSc 2013 Natural Computing Group LIACS Prof. Thomas Bäck, Dr. Rui Li, Dr. Michael Emmerich See also: https://natcomp.liacs.nl Research Project: Dynamic Updates in Robust Optimization
Research Projects BSc 2013 Natural Computing Group LIACS Prof. Thomas Bäck, Dr. Rui Li, Dr. Michael Emmerich See also: https://natcomp.liacs.nl Research Project: Dynamic Updates in Robust Optimization
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Design and Development of an Optimized Fuzzy Proportional-Integral-Derivative Controller using Genetic Algorithm
 INTERNATIONAL CONFERENCE ON CONTROL, AUTOMATION, COMMUNICATION AND ENERGY CONSERVATION 2009, KEC/INCACEC/708 Design and Development of an Optimized Fuzzy Proportional-Integral-Derivative Controller using
INTERNATIONAL CONFERENCE ON CONTROL, AUTOMATION, COMMUNICATION AND ENERGY CONSERVATION 2009, KEC/INCACEC/708 Design and Development of an Optimized Fuzzy Proportional-Integral-Derivative Controller using
A Divide-and-Conquer Approach to Evolvable Hardware
 A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
Exercise 4 Exploring Population Change without Selection
 Exercise 4 Exploring Population Change without Selection This experiment began with nine Avidian ancestors of identical fitness; the mutation rate is zero percent. Since descendants can never differ in
Exercise 4 Exploring Population Change without Selection This experiment began with nine Avidian ancestors of identical fitness; the mutation rate is zero percent. Since descendants can never differ in
Open Source Voices Interview Series Podcast, Episode 03: How Is Open Source Important to the Future of Robotics? English Transcript
 [Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
[Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
CS 441/541 Artificial Intelligence Fall, Homework 6: Genetic Algorithms. Due Monday Nov. 24.
 CS 441/541 Artificial Intelligence Fall, 2008 Homework 6: Genetic Algorithms Due Monday Nov. 24. In this assignment you will code and experiment with a genetic algorithm as a method for evolving control
CS 441/541 Artificial Intelligence Fall, 2008 Homework 6: Genetic Algorithms Due Monday Nov. 24. In this assignment you will code and experiment with a genetic algorithm as a method for evolving control
Vesselin K. Vassilev South Bank University London Dominic Job Napier University Edinburgh Julian F. Miller The University of Birmingham Birmingham
 Towards the Automatic Design of More Efficient Digital Circuits Vesselin K. Vassilev South Bank University London Dominic Job Napier University Edinburgh Julian F. Miller The University of Birmingham Birmingham
Towards the Automatic Design of More Efficient Digital Circuits Vesselin K. Vassilev South Bank University London Dominic Job Napier University Edinburgh Julian F. Miller The University of Birmingham Birmingham
RoboPatriots: George Mason University 2010 RoboCup Team
 RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
Neural Networks for Real-time Pathfinding in Computer Games
 Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Smart Home System for Energy Saving using Genetic- Fuzzy-Neural Networks Approach
 Int. J. of Sustainable Water & Environmental Systems Volume 8, No. 1 (216) 27-31 Abstract Smart Home System for Energy Saving using Genetic- Fuzzy-Neural Networks Approach Anwar Jarndal* Electrical and
Int. J. of Sustainable Water & Environmental Systems Volume 8, No. 1 (216) 27-31 Abstract Smart Home System for Energy Saving using Genetic- Fuzzy-Neural Networks Approach Anwar Jarndal* Electrical and
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
Designing Better Industrial Robots with Adams Multibody Simulation Software
 Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
GA-based Learning in Behaviour Based Robotics
 Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Evolving Finite State Machines for the Propulsion Control of Hybrid
 Evolving Finite State Machines for the Propulsion Control of Hybrid Vehicles JONAS HELLGREN and MATTIAS WAHDE Div. of Machine and Vehicle Design, Div. of Mechatronics Chalmers University of Technology,
Evolving Finite State Machines for the Propulsion Control of Hybrid Vehicles JONAS HELLGREN and MATTIAS WAHDE Div. of Machine and Vehicle Design, Div. of Mechatronics Chalmers University of Technology,
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks
 Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
1 Introuction 1.1 Robots 1.2. Error recovery Self healing or self modelling robots 2.1 Researchers 2.2 The starfish robot 2.2.
 SELF HEALING ROBOTS A SEMINAR REPORT Submitted by AKHIL in partial fulfillment for the award of the degree of BACHELOR OF TECHNOLOGY in COMPUTER SCIENCE & ENGINEERING SCHOOL OF ENGINEERING COCHIN UNIVERSITY
SELF HEALING ROBOTS A SEMINAR REPORT Submitted by AKHIL in partial fulfillment for the award of the degree of BACHELOR OF TECHNOLOGY in COMPUTER SCIENCE & ENGINEERING SCHOOL OF ENGINEERING COCHIN UNIVERSITY