MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
|
|
|
- Ethelbert Stokes
- 6 years ago
- Views:
Transcription

1 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr. Eric M. Schwartz 1
2 TABLE OF CONTENTS 1. Abstract.3 2. Introduction 4 3. Integrated System Mobile Platform 8 5. Actuation Sensors Behavior Documentation 15 2

3 ABSTRACT Master Shifu. The King of Kung Fu. He looks small (yes he is a mouse in the movie!) but do not underestimate his powers. His petite limbs and flexible body make him the Master of the art. He demonstrates his prowess using chopsticks and leaves us all spellbound. Small and stunning, that s what it s all about! 3
4 INTRODUCTION I liked the character of Master Shifu from the movie Kung Fu Panda. I had always wanted to make a robot that walks on legs and not move on wheels. When I realized I could build one using chopsticks, I could not resist. The design and construction of this robot is relatively simple and cheap as well. The overall mass of the robot is also low. Micro servos will be used for movement of the robot and IR sensors for obstacle detection. The system will be run on an Arduino Due processor. 4
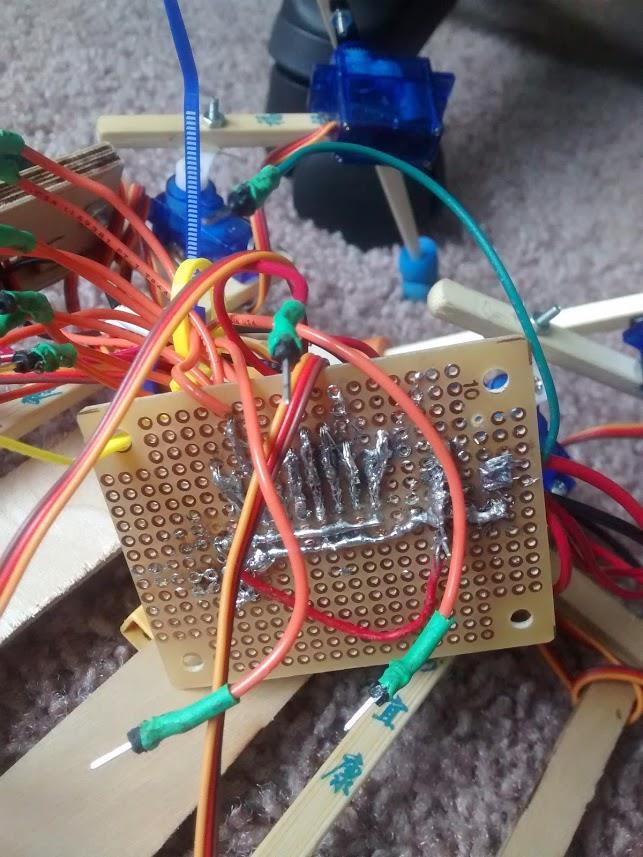
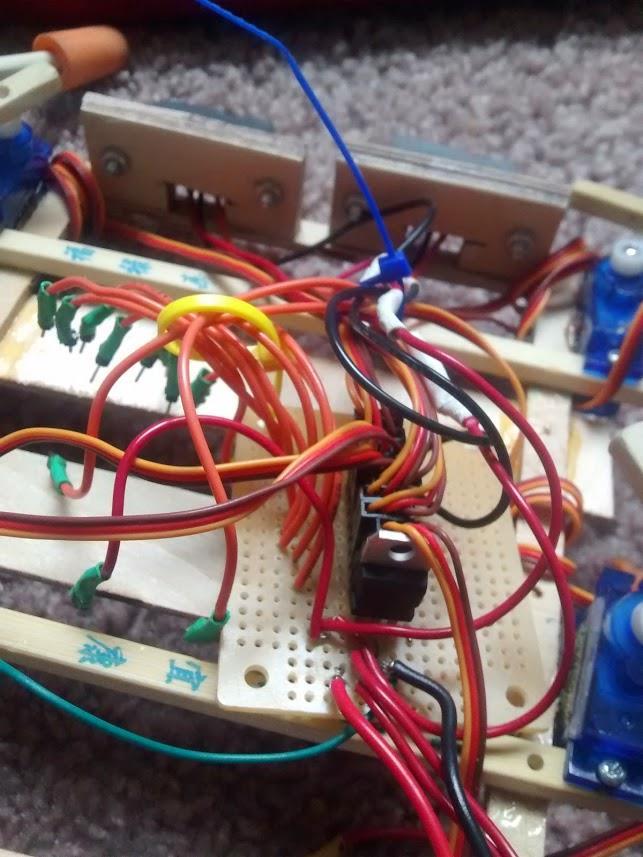
5 3. INTEGRATED SYSTEM µservo µservo IR IR µservo µservo Arduino Due µservo µservo LiPo µservo µservo Battery The robot is powered by Arduino Due processor. It will run 8 micro servo motors and 2 IR sensors. The board will be powered by a 7.4V LiPo Battery which will be regulated down to 5V by a regulator. At a given time, one micro servo will be run (temporarily) followed by sequential delays to make the robot walk. I soldered a regulator on a perf board to bring down the voltage to 5V from 7.4V, and got out the output wires. This will power the servos. 5
6 6
7 7 Fig 3.2

8 4. Mobile Platform A rectangular frame will be the platform of the robot. This will accommodate the battery and the board, owing to supports given at the bottom. At each of the joints of these supports and frames, legs will be screwed in, and micro servos attached. This kind of construction made by wooden slabs or chopsticks will reduce the overall weight of the robot. Since only micro servos are used, it will hence be easier for movement. Also I realized that, framed platform would look better than boxed ones for my robot! Fig 4.1 8
9 5. ACTUATION Servos are controlled by sending them a pulse of variable width. The control wire is used to send this pulse. The parameters for this pulse are that it has a minimum pulse, a maximum pulse, and a repetition rate. Given the rotation constraints of the servo, neutral is defined to be the position where the servo has exactly the same amount of potential rotation in the clockwise direction as it does in the counter clockwise direction. It is important to note that different servos will have different constraints on their rotation but they all have a neutral position, and that position is always around 1.5 milliseconds (ms). Fig. 5.1 The angle is determined by the duration of a pulse that is applied to the control wire. This is called Pulse width Modulation. The servo expects to see a pulse every 20 ms. The length of the pulse will determine how far the motor turns. When a pulse is sent to a servo that is less than 1.5 ms the servo rotates to a position and holds its output shaft some number of degrees counterclockwise from the neutral point. When the pulse is wider than 1.5 ms the opposite occurs. The minimal width and the maximum width of pulse that will command the servo to turn to a valid position are functions of each servo. Different brands, and even different servos of the same brand, will have different maximum and minimums. Generally the minimum pulse will be about 1 ms wide and the maximum pulse will be 2 ms wide. 9
 Torque : 1.6 kg-cm Fig 5.3 Since only one micro servo will be in action at one given time and given that the Arduino Due can function at 3.")
10 Fig. 5.2 My robot will involve a total of 8 micro servos. Each of these are: Size : 23x11x29 mm Voltage : 3V to 6V DC Weight: 9g / 0.32oz Speed : 0.12 sec/60 (at 4.8V) Torque : 1.6 kg-cm Fig 5.3 Since only one micro servo will be in action at one given time and given that the Arduino Due can function at 3.3V, minimum voltage can be fed in. 10
11 The robot consists of four legs. Each leg is made of two parts the shoulder and the arm. Two micro servos will be attached to each leg, one at the joint of the frame and the shoulder and the other at that of shoulder and the arm. Thus the servo at the shoulder is first rotated followed by the respective arm and this movement is repeated by the diagonally opposite leg. The same set is performed by the remaining two legs. The rotation of the shoulder will help cover the height required for the arm to lift and cover the horizontal distance. 11


12 6. SENSORS Sharp IR sensors will be used for detecting obstacles. If the robot detects an obstacle, it will move back walk away from it. The demo was done on the obstacle detection demo day. Here I used just the shoulders of the robot and I had not attached the arms yet. Fig
13 The coding used to control 4 motors is shown in the following screenshot. 13

14 7. BEHAVIOUR The robot will be able to move forward when the micro servos in the front leg are activated, followed by those on the diagonally opposite hind leg. The robot will have covered a certain distance in one cycle, which is called gait. For sideways movement, the micro servos on the forward leg is activated followed by the other forward leg, after which the hind leg servos are activated. The robot will have two PIR sensors mounted on both the forward legs which will detect obstacles in its range and command the robot accordingly to avoid them. The special sensor of my robot system will be the walking mechanism and the different movements that are possible. 14
15 8. DOCUMENTATION I used the following websites
Park Ranger. Li Yang April 21, 2014
 Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
T.E.S.L.A (Terrain Exoskeleton (that) Shocks Large Animals) Mark Tate
 Shocks Large Animals) Mark Tate") T.E.S.L.A (Terrain Exoskeleton (that) Shocks Large Animals) Mark Tate April 23, 2013 University of Florida Mechanical Engineering EEL 4665C IMDL Formal Report Instructors: A. Antonio Arroyo, Eric M. Schwartz
T.E.S.L.A (Terrain Exoskeleton (that) Shocks Large Animals) Mark Tate April 23, 2013 University of Florida Mechanical Engineering EEL 4665C IMDL Formal Report Instructors: A. Antonio Arroyo, Eric M. Schwartz
RoboSAR Written Report 1
 Date: 4/21/15 Student Name: Lukas Christensen E-Mail: lukaschristensen@ufl.edu TAs: Andy Gray Nick Cox Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical
Date: 4/21/15 Student Name: Lukas Christensen E-Mail: lukaschristensen@ufl.edu TAs: Andy Gray Nick Cox Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical
Figure 1. Overall Picture
 Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
Quadro University Of Florida Department of Electrical and Computer Engineering Intelligent Machines Design Laboratory
 Quadro University Of Florida Department of Electrical and Computer Engineering Intelligent Machines Design Laboratory Jeffrey Van Anda 4/28/97 Dr. Keith L. Doty TABLE OF CONTENTS ABSTRACT...3 EXECUTIVE
Quadro University Of Florida Department of Electrical and Computer Engineering Intelligent Machines Design Laboratory Jeffrey Van Anda 4/28/97 Dr. Keith L. Doty TABLE OF CONTENTS ABSTRACT...3 EXECUTIVE
Experiment 4.B. Position Control. ECEN 2270 Electronics Design Laboratory 1
 Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
EEL 4665/5666 Intelligent Machines Design Laboratory. Messenger. Final Report. Date: 4/22/14 Name: Revant shah
 EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Final Report. by Mingwei Liu. Robot Name: Danner
 ! " Final Report by Mingwei Liu Robot Name: Danner Course Name: EEL5666 Intelligent Machine Design Lab Instructors: Dr. A. Antonio Arroyo, Dr. Eric M. Schwartz TAs: Devin Hughes, Tim Martin, Ryan Stevens,
! " Final Report by Mingwei Liu Robot Name: Danner Course Name: EEL5666 Intelligent Machine Design Lab Instructors: Dr. A. Antonio Arroyo, Dr. Eric M. Schwartz TAs: Devin Hughes, Tim Martin, Ryan Stevens,
Robotic Swing Drive as Exploit of Stiffness Control Implementation
 Robotic Swing Drive as Exploit of Stiffness Control Implementation Nathan J. Nipper, Johnny Godowski, A. Arroyo, E. Schwartz njnipper@ufl.edu, jgodows@admin.ufl.edu http://www.mil.ufl.edu/~swing Machine
Robotic Swing Drive as Exploit of Stiffness Control Implementation Nathan J. Nipper, Johnny Godowski, A. Arroyo, E. Schwartz njnipper@ufl.edu, jgodows@admin.ufl.edu http://www.mil.ufl.edu/~swing Machine
A Model Based Approach for Human Recognition and Reception by Robot
 16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
Final Report Metallocalizer
 Date: 12/08/09 Student Name: Fernando N. Coviello TAs : Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Final Report Metallocalizer University of Florida Department
Date: 12/08/09 Student Name: Fernando N. Coviello TAs : Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Final Report Metallocalizer University of Florida Department
Mechatronic Design, Fabrication and Analysis of a Small-Size Humanoid Robot Parinat
 Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
istand I can Stand SPECIAL SENSOR REPORT
 istand I can Stand SPECIAL SENSOR REPORT SUBRAT NAYAK UFID: 5095-9761 For EEL 5666 - Intelligent Machines Design Laboratory (Spring 2008) Department of Electrical and Computer Engineering University of
istand I can Stand SPECIAL SENSOR REPORT SUBRAT NAYAK UFID: 5095-9761 For EEL 5666 - Intelligent Machines Design Laboratory (Spring 2008) Department of Electrical and Computer Engineering University of
IMDL Fall Final Report
 IMDL Fall 2014 Final Report Designer: Jacob Easterling Robot Name: Clean Sweep Course Number: EEL 4665 Instructors: Dr. Arroyo Dr. Schwartz Dr. Diaz Teaching Assistants: Andy Gray Nick Cox C l e a n S
IMDL Fall 2014 Final Report Designer: Jacob Easterling Robot Name: Clean Sweep Course Number: EEL 4665 Instructors: Dr. Arroyo Dr. Schwartz Dr. Diaz Teaching Assistants: Andy Gray Nick Cox C l e a n S
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory GetMAD Final Report
 Date: 12/8/2009 Student Name: Sarfaraz Suleman TA s: Thomas Vermeer Mike Pridgen Instuctors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering
Date: 12/8/2009 Student Name: Sarfaraz Suleman TA s: Thomas Vermeer Mike Pridgen Instuctors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
The ROUS: Gait Experiments with Quadruped Agents Megan Grimm, A. Antonio Arroyo
 The ROUS: Gait Experiments with Quadruped Agents Megan Grimm, A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Abstract
The ROUS: Gait Experiments with Quadruped Agents Megan Grimm, A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Abstract
POKER BOT. Justin McIntire EEL5666 IMDL. Dr. Schwartz and Dr. Arroyo
 POKER BOT Justin McIntire EEL5666 IMDL Dr. Schwartz and Dr. Arroyo Table of Contents: Introduction.page 3 Platform...page 4 Function...page 4 Sensors... page 6 Circuits....page 8 Behaviors...page 9 Problems
POKER BOT Justin McIntire EEL5666 IMDL Dr. Schwartz and Dr. Arroyo Table of Contents: Introduction.page 3 Platform...page 4 Function...page 4 Sensors... page 6 Circuits....page 8 Behaviors...page 9 Problems
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
Rack Attack. EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M.
 04/22/08 Student Name: Barry Solomon TAs : Adam Barnett Mike Pridgen Sara Keen Rack Attack EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M. Schwartz,
04/22/08 Student Name: Barry Solomon TAs : Adam Barnett Mike Pridgen Sara Keen Rack Attack EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M. Schwartz,
meped v2 Assembly Manual
 meped v Assembly Manual The meped is an open source quadruped robot designed by Scott Pierce of Spierce Technologies, LLC. This design is released under the Creative Commons, By Attribution, Share Alike
meped v Assembly Manual The meped is an open source quadruped robot designed by Scott Pierce of Spierce Technologies, LLC. This design is released under the Creative Commons, By Attribution, Share Alike
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Wakey Wakey Autonomous Alarm robot
 Wakey Wakey Autonomous Alarm robot Leandro Durand University of Florida Department of Electrical and Computer Engineering EEL 4665C IMDL Formal Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TA:
Wakey Wakey Autonomous Alarm robot Leandro Durand University of Florida Department of Electrical and Computer Engineering EEL 4665C IMDL Formal Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TA:
The Mathematics of the Stewart Platform
 The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Other than physical size, the next item that all RC servo specifications indicate is speed and torque.
 RC servos convert electrical commands from the receiver back into movement. A servo simply plugs into a specific receiver channel and is used to move that specific part of the RC model. This movement is
RC servos convert electrical commands from the receiver back into movement. A servo simply plugs into a specific receiver channel and is used to move that specific part of the RC model. This movement is
Servos A Brief Guide
 Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory Formal Report
 Date: 03/25/10 Name: Sean Frucht TAs: Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering EEL 5666
Date: 03/25/10 Name: Sean Frucht TAs: Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering EEL 5666
The plan... CSE 6324 From control to actuators Michael Jenkin Office Hours: Sherman 1028 Wed 3-4. From the bottom up...
 The plan... CSE 6324 From control to actuators Michael Jenkin jenkin@cse.yorku.ca Office Hours: Sherman 1028 Wed 3-4 Lectures this week No class next week Start building the week after (i) Need to sort
The plan... CSE 6324 From control to actuators Michael Jenkin jenkin@cse.yorku.ca Office Hours: Sherman 1028 Wed 3-4 Lectures this week No class next week Start building the week after (i) Need to sort
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
High Speed Continuous Rotation Servo (# )
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
StenBOT Robot Kit. Stensat Group LLC, Copyright 2018
 StenBOT Robot Kit 1 Stensat Group LLC, Copyright 2018 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
StenBOT Robot Kit 1 Stensat Group LLC, Copyright 2018 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
Exercise 2. Point-to-Point Programs EXERCISE OBJECTIVE
 Exercise 2 Point-to-Point Programs EXERCISE OBJECTIVE In this exercise, you will learn various important terms used in the robotics field. You will also be introduced to position and control points, and
Exercise 2 Point-to-Point Programs EXERCISE OBJECTIVE In this exercise, you will learn various important terms used in the robotics field. You will also be introduced to position and control points, and
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
1 Day Robot Building (MC40A + Aluminum Base) for Edubot 2.0
 for Edubot 2.0") 1 Day Robot Building (MC40A + Aluminum Base) for Edubot 2.0 Have you ever thought of making a mobile robot in 1 day? Now you have the chance with MC40A Mini Mobile Robot Controller + some accessories.
1 Day Robot Building (MC40A + Aluminum Base) for Edubot 2.0 Have you ever thought of making a mobile robot in 1 day? Now you have the chance with MC40A Mini Mobile Robot Controller + some accessories.
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT
 EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
A servo is an electric motor that takes in a pulse width modulated signal that controls direction and speed. A servo has three leads:
 Project 4: Arduino Servos Part 1 Description: A servo is an electric motor that takes in a pulse width modulated signal that controls direction and speed. A servo has three leads: a. Red: Current b. Black:
Project 4: Arduino Servos Part 1 Description: A servo is an electric motor that takes in a pulse width modulated signal that controls direction and speed. A servo has three leads: a. Red: Current b. Black:
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
INTRODUCTION TO ROBOTICS
 INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
Bipedinno. 12-DOF Waist-high Robot
 Bipedinno 12-DOF Waist-high Robot Instruction Manual Version 1.18 Trademark Innovati,, and BASIC Commander, are registered trademarks of Innovati Inc. InnoBASIC and cmdbus are trademarks of Innovati Inc.
Bipedinno 12-DOF Waist-high Robot Instruction Manual Version 1.18 Trademark Innovati,, and BASIC Commander, are registered trademarks of Innovati Inc. InnoBASIC and cmdbus are trademarks of Innovati Inc.
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
Final Report. Chazer Gator. by Siddharth Garg
 Final Report Chazer Gator by Siddharth Garg EEL 5666: Intelligent Machines Design Laboratory A. Antonio Arroyo, PhD Eric M. Schwartz, PhD Thomas Vermeer, Mike Pridgen No table of contents entries found.
Final Report Chazer Gator by Siddharth Garg EEL 5666: Intelligent Machines Design Laboratory A. Antonio Arroyo, PhD Eric M. Schwartz, PhD Thomas Vermeer, Mike Pridgen No table of contents entries found.
the Board of Education
 the Board of Education Voltage regulator electrical power (V dd, V in, V ss ) breadboard (for building circuits) power jack digital input / output pins 0 to 15 reset button Three-position switch 0 = OFF
the Board of Education Voltage regulator electrical power (V dd, V in, V ss ) breadboard (for building circuits) power jack digital input / output pins 0 to 15 reset button Three-position switch 0 = OFF
Robodyssey Mini Roach
 Robodyssey Mini Roach Assembly Instructions Version 1.1 Robodyssey Systems, LLC. Phone/Fax: 609-585-8535 20 Quimby Avenue Web: www.robodyssey.com Trenton, New Jersey 08610 Email: info@robodyssey.com Copright
Robodyssey Mini Roach Assembly Instructions Version 1.1 Robodyssey Systems, LLC. Phone/Fax: 609-585-8535 20 Quimby Avenue Web: www.robodyssey.com Trenton, New Jersey 08610 Email: info@robodyssey.com Copright
Machine Intelligence Laboratory
 Introduction Robot Control There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Introduction Robot Control There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
I. INTRODUCTION MAIN BLOCKS OF ROBOT
 Stair-Climbing Robot for Rescue Applications Prof. Pragati.D.Pawar 1, Prof. Ragini.D.Patmase 2, Mr. Swapnil.A.Kondekar 3, Mr. Nikhil.D.Andhare 4 1,2 Department of EXTC, 3,4 Final year EXTC, J.D.I.E.T Yavatmal,Maharashtra,
Stair-Climbing Robot for Rescue Applications Prof. Pragati.D.Pawar 1, Prof. Ragini.D.Patmase 2, Mr. Swapnil.A.Kondekar 3, Mr. Nikhil.D.Andhare 4 1,2 Department of EXTC, 3,4 Final year EXTC, J.D.I.E.T Yavatmal,Maharashtra,
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
1. Description of Hexapod Basic Gaits Mechanical Structure Electronics Programming Team Members...
 1. Description of Hexapod...3 2. Basic Gaits...5 3. Mechanical Structure...6 4. Electronics...11 5. Programming...14 6. Team Members...15 2 HEXAPOD Hexapod is an A DRPG project by second year (Y10) UG
1. Description of Hexapod...3 2. Basic Gaits...5 3. Mechanical Structure...6 4. Electronics...11 5. Programming...14 6. Team Members...15 2 HEXAPOD Hexapod is an A DRPG project by second year (Y10) UG
TETRIX PULSE Workshop Guide
 TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
Convert a Hitec HS-300 Servo to Continuous Operation
 Site Map Shopping Cart Engineering Services Contact US Home Dios and Athena KRMx01 Mechanics Projects Downloads Forums GAN116_hs300 Convert a Hitec HS-300 Servo to Continuous Operation By Michael Simpson
Site Map Shopping Cart Engineering Services Contact US Home Dios and Athena KRMx01 Mechanics Projects Downloads Forums GAN116_hs300 Convert a Hitec HS-300 Servo to Continuous Operation By Michael Simpson
Introduction: Components used:
 Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Welcome to EGN-1935: Electrical & Computer Engineering (Ad)Ventures
Ventures") : ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
: ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, Background
 1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
Laboratory 2 More Resistor Networks and Potentiometers.
 Laboratory More Resistor Networks and Potentiometers. Introduction Laboratory page of 5 This is a relatively short laboratory, because you will also be assembling your Micro-BLIP, a customized device based
Laboratory More Resistor Networks and Potentiometers. Introduction Laboratory page of 5 This is a relatively short laboratory, because you will also be assembling your Micro-BLIP, a customized device based
Feed-back loop. open-loop. closed-loop
 Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
DA DA
 1/16 DA 13 DA 13 05 32 DA 13 05 60 2/16 Content 1. General Description... 3 2. Operating Data... 4 3. Performance... Fehler! Textmarke nicht definiert. 4. Command Signal... 6 4.1. Position Feedback Signal...
1/16 DA 13 DA 13 05 32 DA 13 05 60 2/16 Content 1. General Description... 3 2. Operating Data... 4 3. Performance... Fehler! Textmarke nicht definiert. 4. Command Signal... 6 4.1. Position Feedback Signal...
Mini Hexapodinno. 18-DOF Robot
 Mini Hexapodinno 18-DOF Robot Instruction Manual Version 1.11 Trademark Innovati,, and BASIC Commander, are registered trademarks of Innovati Inc. InnoBASIC and cmdbus are trademarks of Innovati Inc. Copyright
Mini Hexapodinno 18-DOF Robot Instruction Manual Version 1.11 Trademark Innovati,, and BASIC Commander, are registered trademarks of Innovati Inc. InnoBASIC and cmdbus are trademarks of Innovati Inc. Copyright
Design and Development of Novel Two Axis Servo Control Mechanism
 Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Arduino Control of Tetrix Prizm Robotics. Motors and Servos Introduction to Robotics and Engineering Marist School
 Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Morris Mobile Pet Feeder Sensor Development
 Morris Mobile Pet Feeder Sensor Development Joseph Stanley Report Date: 7/11/02 University of Florida Department of Electrical and Computer Engineering EEL5666 Intelligent Machine Design Laboratory Instructor:
Morris Mobile Pet Feeder Sensor Development Joseph Stanley Report Date: 7/11/02 University of Florida Department of Electrical and Computer Engineering EEL5666 Intelligent Machine Design Laboratory Instructor:
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ILR #1: Sensors and Motor Control Lab. Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang
 Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang") ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION
 THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
The Torxis Linear Servo meets the following environmental conditions:
 Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Andrew Kobyljanec. Intelligent Machine Design Lab EEL 5666C January 31, ffitibot. Gra. raffiti. Formal Report
 Andrew Kobyljanec Intelligent Machine Design Lab EEL 5666C January 31, 2008 Gra raffiti ffitibot Formal Report Table of Contents Opening... 3 Abstract... 3 Introduction... 4 Main Body... 5 Integrated System...
Andrew Kobyljanec Intelligent Machine Design Lab EEL 5666C January 31, 2008 Gra raffiti ffitibot Formal Report Table of Contents Opening... 3 Abstract... 3 Introduction... 4 Main Body... 5 Integrated System...
RoBoard Servo Motor RS-0263 Manual V1.01 The Heart of Robotics. Dec 2010 DMP Electronics Inc.
 Manual V1.01 Dec 2010 DMP Electronics Inc. Copyright The information in this manual is subject to change without notice for continuous improvement in the product. All rights are reserved. The manufacturer
Manual V1.01 Dec 2010 DMP Electronics Inc. Copyright The information in this manual is subject to change without notice for continuous improvement in the product. All rights are reserved. The manufacturer
Autonomous Obstacle Avoiding and Path Following Rover
 Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Hobby Servo Tutorial. Introduction. Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial
 Hobby Servo Tutorial Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial Introduction Servo motors are an easy way to add motion to your electronics projects. Originally used in remotecontrolled
Hobby Servo Tutorial Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial Introduction Servo motors are an easy way to add motion to your electronics projects. Originally used in remotecontrolled
Robot Control. Robot Control
 Robot Control Introduction There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Robot Control Introduction There is a nice review of the issues in robot control in the 6270 Manual Robots get stuck against obstacles, walls and other robots. Why? Is it mechanical or electronic or sensor
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
UNDERSTANDING RC SERVOS DIGITAL, ANALOG CORELESS, BRUSHLESS
 1 of 12 2/13/10 10:52 AM FIRST STEPS UNDERSTANDING RC SERVOS DIGITAL, ANALOG CORELESS, BRUSHLESS TYPES OF HELIS HOW THEY WORK ACCESSORY INFO As we have briefly discussed, RC servos convert electrical commands
1 of 12 2/13/10 10:52 AM FIRST STEPS UNDERSTANDING RC SERVOS DIGITAL, ANALOG CORELESS, BRUSHLESS TYPES OF HELIS HOW THEY WORK ACCESSORY INFO As we have briefly discussed, RC servos convert electrical commands
General Description. The TETRIX MAX Servo Motor Expansion Controller features the following:
 General Description The TETRIX MAX Servo Motor Expansion Controller is a servo motor expansion peripheral designed to allow the addition of multiple servo motors to the PRIZM Robotics Controller. The device
General Description The TETRIX MAX Servo Motor Expansion Controller is a servo motor expansion peripheral designed to allow the addition of multiple servo motors to the PRIZM Robotics Controller. The device
Building an autonomous light finder robot
 LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
Continuous Rotation Servo Trigger Hookup Guide
 Page 1 of 13 Continuous Rotation Servo Trigger Hookup Guide Introduction When we introduced the regular Servo Trigger, we mentioned that it could be reprogrammed to be more useful with continuous rotation
Page 1 of 13 Continuous Rotation Servo Trigger Hookup Guide Introduction When we introduced the regular Servo Trigger, we mentioned that it could be reprogrammed to be more useful with continuous rotation
INTRODUCTION OF SOME APPROACHES FOR EDUCATIONS OF ROBOT DESIGN AND MANUFACTURING
 INTRODUCTION OF SOME APPROACHES FOR EDUCATIONS OF ROBOT DESIGN AND MANUFACTURING T. Matsuo *,a, M. Tatsuguchi a, T. Higaki a, S. Kuchii a, M. Shimazu a and H. Terai a a Department of Creative Engineering,
INTRODUCTION OF SOME APPROACHES FOR EDUCATIONS OF ROBOT DESIGN AND MANUFACTURING T. Matsuo *,a, M. Tatsuguchi a, T. Higaki a, S. Kuchii a, M. Shimazu a and H. Terai a a Department of Creative Engineering,
RC Servo Interface. Figure Bipolar amplifier connected to a large DC motor
 The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
Assembly Guide Robokits India
 Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
University of Florida. Department of Electrical Engineering EEL5666. Intelligent Machine Design Laboratory. Doc Bloc. Larry Brock.
 University of Florida Department of Electrical Engineering EEL5666 Intelligent Machine Design Laboratory Doc Bloc Larry Brock April 21, 1999 IMDL Spring 1999 Instructor: Dr. Arroyo 2 Table of Contents
University of Florida Department of Electrical Engineering EEL5666 Intelligent Machine Design Laboratory Doc Bloc Larry Brock April 21, 1999 IMDL Spring 1999 Instructor: Dr. Arroyo 2 Table of Contents
Pick and Place Robotic Arm Using Arduino
 Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014