On-demand printable robots
|
|
|
- Marsha Lamb
- 5 years ago
- Views:
Transcription
1 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology
2 3 Computational problem?
3 4 Physical problem? There s a robot for that.

4 5 Robot compiler Vision: Autonomously generate designs for personal robots Big picture goal: $ vim myrobot.rbt I want a robot to make me breakfast $ make myrobot Parsing specification done. Determining behaviors done. Generating mechanisms done. Assembling components done. Printing done. Success!

5 6 Challenges Subsystem integration




6 7 Application space Users Constraints



7 8 Related work Rapid fabrication 3D printing: Mavroidis et al., J. Mech. Des. 01; Lipson et al., J. Mech. Des. 05; Rossiter et al., SPIE Smart Struct. and Mat. 09; and others 2D printing: Shimoyama et al., Control Systems 93, Hoover et al., ICRA 08; Onal et al., Trans. Mechatronics 13; and others Requires domain specific expertise and CAD tools


8 9 Related work Modular design of robots Farritor et al., ICRA 96; Hornby et al., IEEE Trans. Robotics and Automation 03; Davey et al., IROS 12; Romanishin et al., IROS 13; and others. Employs expensive custom components with limited configurations
9 10 Goal Enable the on-demand creation of custom printable electromechanical systems Design intuitively Fabricate cheaply Iterate rapidly





10 An Expedition in Computing for compiling printable programmable machines
11 12 Task definition + decomposition Functional decomposition Robot compiler: design flow Input: high level task specification I want a robot to play chess Output: functional specification Mobility across a 50cm x 50cm square with obstacles Ability to move pieces Knowledge of chess rules
12 13 Task definition + decomposition Functional decomposition Modular composition Unified mechanism Robot compiler: design flow Input: functional specification Output: modular definition Chassis Motorized legs Gripper Power, processing, communication Chess logic
13 14 Task definition + decomposition Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Robot compiler: design flow Input: modular definition Output: parameterized robot design Mechanical template Electromechanical transducers Electrical connectivity Algorithms
14 15 Task definition + decomposition Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Fully specified design Realization Structural constraints Robot compiler: design flow Input: parameterized robot design Output: fabrication plan Fold pattern Circuit layout and specific components Executable drivers, software, and user interface

15 16 Task definition + decomposition Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Structural constraints Robot compiler: design flow Input: fabrication plan Output: physical device Folded robot with circuit, firmware, and software Realization Fully specified design Fabrication Robot

16 17 Task definition + decomposition Robot compiler: design flow Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Realization Structural constraints Behavioral constraints Input: physical device Output: mission accomplished! Fully specified design Fabrication Robot Operation
17 18 Task definition + decomposition Current system Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Fully specified design Realization Structural constraints Behavioral constraints Input: structural specification Output: robot designs Directly fabricable mechanical drawings Wiring diagram Arduino firmware Android UI Fabrication Robot Operation




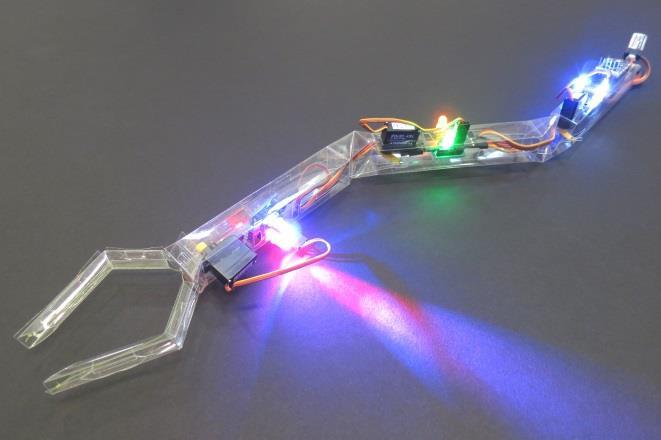
18 19 A real world example Request: We need a robot In ascii art form it is: X t where is a rotational axis, and t is the tool. rotating joint ActuatedHinge the tool ActuatedGripper ~1 hour later Arm = ActuatedHinge + ActuatedHinge + ActuatedGripper
19 INTEGRATED CO-DESIGN Ankur Mehta 20



20 21 On-demand printed robots + + Conceive Determine Assemble new Compile, print and electromechanical components functional from run! decomposition mechanism library


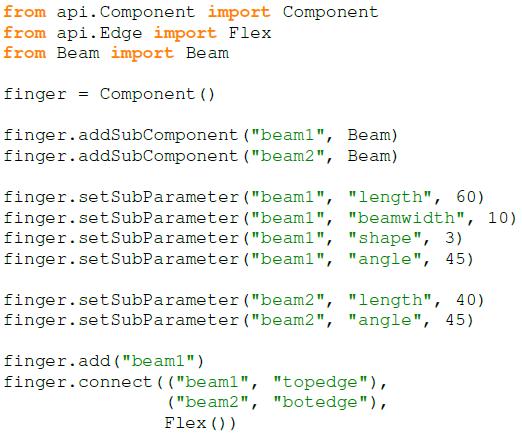
21 22 Software defined hardware Parameterized, process independent representation Object oriented code abstraction of design modules Algorithms to generate fabricable drawings




22 24 Library of components Mechanical building blocks Electrical building blocks Software building blocks UI elements


23 25 Composition algorithms Hierarchical composition across subsystems Computation for combining functionality of modules

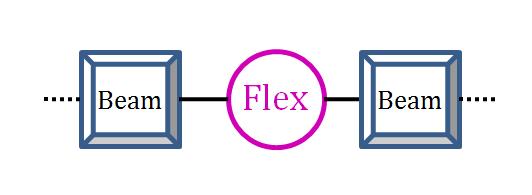
24 26 Hierarchical design composition { Subcomponents } { Parameters } { Interfaces } Inherited by default Can be specified by imposing constraints
25 Hierarchical design composition Ankur Mehta 28



26 30 Full system

27 31 Lets make robots!
28 ROBOT COMPILER USERS Ankur Mehta 32

")
29 33 Design paradigm User selects desired geometries with degrees of freedom and their ranges. Standard user: assembles building blocks (GUI) Expert user: can generate building blocks (Python)

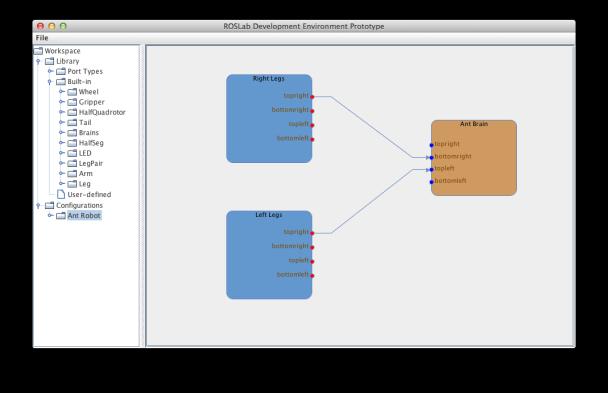
30 34 ROSLab design environment Graphical programming language Automatic modular code generation

31 Robot design Ankur Mehta 35
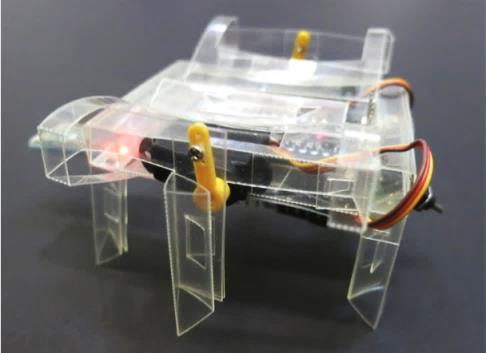
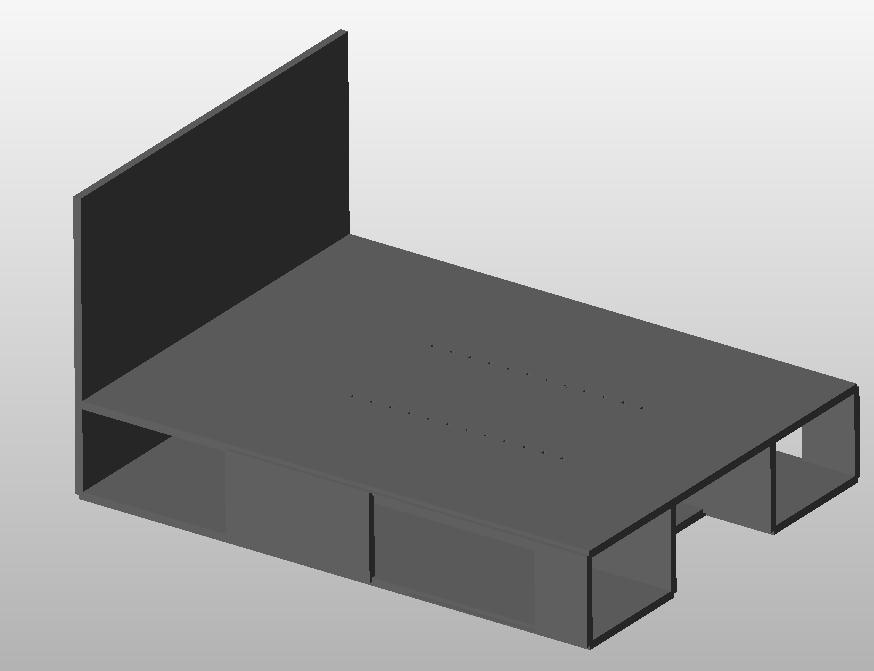
32 36 Designed robots

33 37 Designed robots
34 38 FABRICATION-INDEPENDENT DESIGN
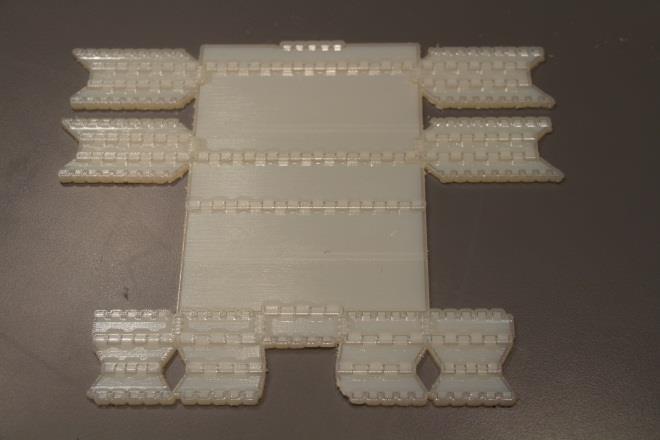
35 39 Robot fabrication: 3D print
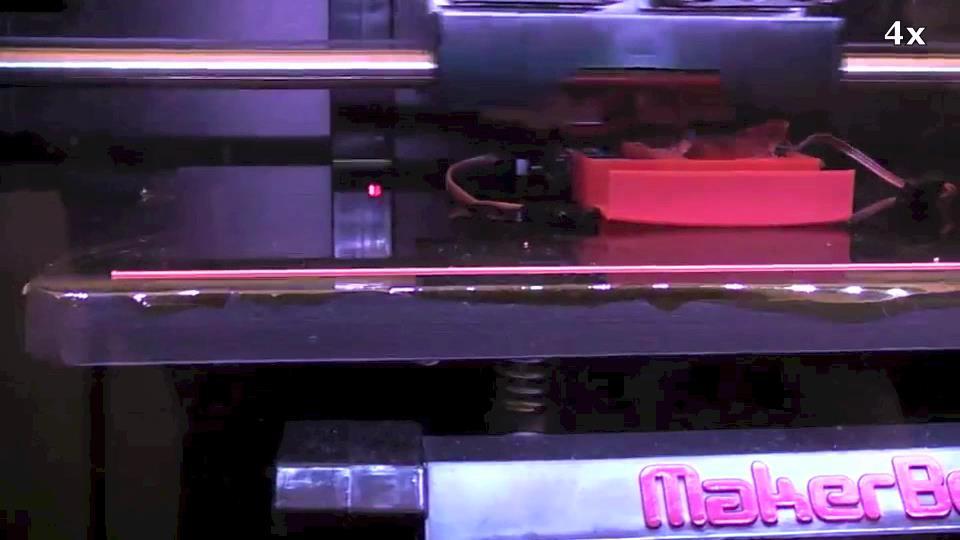
36 40 Robot fabrication: 3D print
37 41 Robot fabrication: 3D print Pros: Cons: Minimal user assembly / post fabrication processing Strong rigid bodies Long fabrication time Minimal compliance
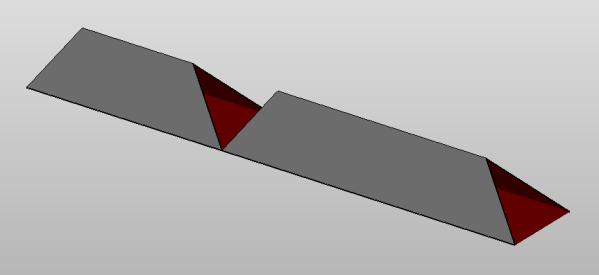
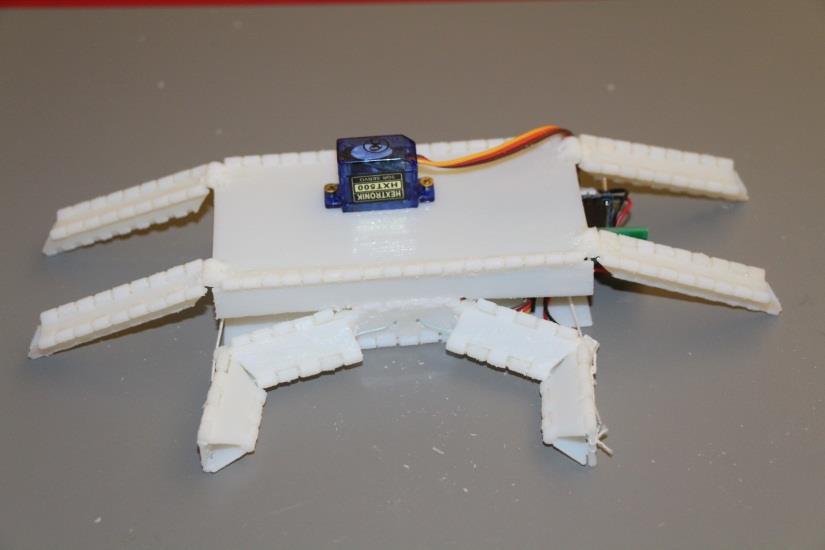
38 42 Robot fabrication: cut-and-fold

39 43 Robot fabrication: cut-and-fold

40 44 Robot fabrication: cut-and-fold
41 45 Robot fabrication: cut-and-fold Pros: Cons: Cheap and universally fabricable Controlled compliance Requires post-process assembly Weak structures
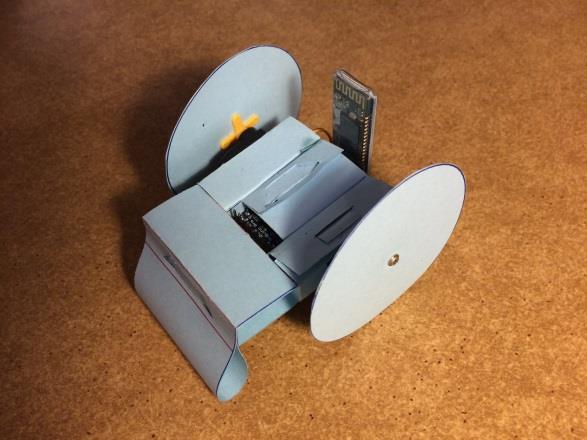
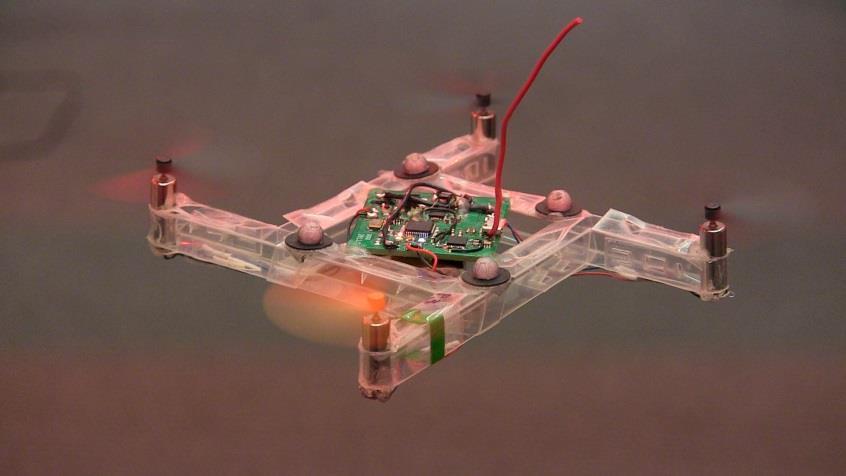
42 46 Robot fabrication: self-folding

43 47 Robot fabrication: self-folding
44 48 Robot fabrication: self-folding Pros: Cons: Fast fabrication time with low user-driven assembly Both rigid and flexible elements Large tolerances Design compromises

45 49 One design, four robots


46 New hybrid processes Ankur Mehta 50
47 APPLICATION PROGRAMMING Ankur Mehta 52
48 53 Task definition + decomposition Robot programming Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Structural constraints Behavioral constraints Autonomous behaviors Feedback controllers Task driven programs Realization Fully specified design Fabrication Robot Operation

49 54 Autogenerated user interface Motor mount Motor PWM driver Drive unit UI Joystick Left wheel Right wheel

50 55 Programmed autonomy Light sensor Left speed Right speed Left wheel Right wheel
51 56 Task definition + decomposition Current work Functional decomposition Modular composition Co-design implementation Realization Structural constraints Behavioral constraints Verification & validation Kinematic simulations REACT programming Derive behavior from designs Ensure that the output matches the desired input Fabrication Robot Operation
52 57 Algorithmic questions Provably correct composition for integrated designs Optimality bounds for composed designs Functional decomposition Fabrication specifications Efficiency metrics Computation Task completion
53 58 Task definition + decomposition Future work Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Realization Structural constraints Behavioral constraints How do we identify which mechanisms will accomplish desired functions? Fully specified design Fabrication Robot Operation
54 59 Task definition + decomposition Future work Functional decomposition Modular composition Unified mechanism Co-design implementation Parameterized model Fully specified design Realization Structural constraints Behavioral constraints How do we identify which mechanisms will accomplish desired functions? How do we identify what functions are required for a given task? Robot programming language Fabrication Robot Operation
55 61 Robots!
Rethinking CAD. Brent Stucker, Univ. of Louisville Pat Lincoln, SRI
 Rethinking CAD Brent Stucker, Univ. of Louisville Pat Lincoln, SRI The views expressed are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S.
Rethinking CAD Brent Stucker, Univ. of Louisville Pat Lincoln, SRI The views expressed are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S.
Digital Systems Design
 Digital Systems Design Digital Systems Design and Test Dr. D. J. Jackson Lecture 1-1 Introduction Traditional digital design Manual process of designing and capturing circuits Schematic entry System-level
Digital Systems Design Digital Systems Design and Test Dr. D. J. Jackson Lecture 1-1 Introduction Traditional digital design Manual process of designing and capturing circuits Schematic entry System-level
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Undefined Obstacle Avoidance and Path Planning
 Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Robotics. In Textile Industry: Global Scenario
 Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Computer-Aided Manufacturing
 Computer-Aided Manufacturing Third Edition Tien-Chien Chang, Richard A. Wysk, and Hsu-Pin (Ben) Wang PEARSON Prentice Hall Upper Saddle River, New Jersey 07458 Contents Chapter 1 Introduction to Manufacturing
Computer-Aided Manufacturing Third Edition Tien-Chien Chang, Richard A. Wysk, and Hsu-Pin (Ben) Wang PEARSON Prentice Hall Upper Saddle River, New Jersey 07458 Contents Chapter 1 Introduction to Manufacturing
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Husky Robotics Team. Information Packet. Introduction
 Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
Mechatronic Design, Fabrication and Analysis of a Small-Size Humanoid Robot Parinat
 Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
Wheeled Mobile Robot Kuzma I
 Contemporary Engineering Sciences, Vol. 7, 2014, no. 18, 895-899 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ces.2014.47102 Wheeled Mobile Robot Kuzma I Andrey Sheka 1, 2 1) Department of Intelligent
Contemporary Engineering Sciences, Vol. 7, 2014, no. 18, 895-899 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ces.2014.47102 Wheeled Mobile Robot Kuzma I Andrey Sheka 1, 2 1) Department of Intelligent
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules.
 Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Introduction to Artificial Intelligence. Department of Electronic Engineering 2k10 Session - Artificial Intelligence
 Introduction to Artificial Intelligence What is Intelligence??? Intelligence is the ability to learn about, to learn from, to understand about, and interact with one s environment. Intelligence is the
Introduction to Artificial Intelligence What is Intelligence??? Intelligence is the ability to learn about, to learn from, to understand about, and interact with one s environment. Intelligence is the
The secret behind mechatronics
 The secret behind mechatronics Why companies will want to be part of the revolution In the 18th century, steam and mechanization powered the first Industrial Revolution. At the turn of the 20th century,
The secret behind mechatronics Why companies will want to be part of the revolution In the 18th century, steam and mechanization powered the first Industrial Revolution. At the turn of the 20th century,
Stress and Strain Analysis in Critical Joints of the Bearing Parts of the Mobile Platform Using Tensometry
 American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
Model-based and Component-oriented Programming of Robot Controls
 Laboratory CIM & Robotik Prof. Dipl.-Ing. Georg Stark Model-based and Component-oriented Programming of Robot Controls 1. Development Process of Industrial Control Units 2. Programming Paradigms - object-oriented
Laboratory CIM & Robotik Prof. Dipl.-Ing. Georg Stark Model-based and Component-oriented Programming of Robot Controls 1. Development Process of Industrial Control Units 2. Programming Paradigms - object-oriented
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
A New Simulator for Botball Robots
 A New Simulator for Botball Robots Stephen Carlson Montgomery Blair High School (Lockheed Martin Exploring Post 10-0162) 1 Introduction A New Simulator for Botball Robots Simulation is important when designing
A New Simulator for Botball Robots Stephen Carlson Montgomery Blair High School (Lockheed Martin Exploring Post 10-0162) 1 Introduction A New Simulator for Botball Robots Simulation is important when designing
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
I. INTRODUCTION MAIN BLOCKS OF ROBOT
 Stair-Climbing Robot for Rescue Applications Prof. Pragati.D.Pawar 1, Prof. Ragini.D.Patmase 2, Mr. Swapnil.A.Kondekar 3, Mr. Nikhil.D.Andhare 4 1,2 Department of EXTC, 3,4 Final year EXTC, J.D.I.E.T Yavatmal,Maharashtra,
Stair-Climbing Robot for Rescue Applications Prof. Pragati.D.Pawar 1, Prof. Ragini.D.Patmase 2, Mr. Swapnil.A.Kondekar 3, Mr. Nikhil.D.Andhare 4 1,2 Department of EXTC, 3,4 Final year EXTC, J.D.I.E.T Yavatmal,Maharashtra,
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
PI: Rhoads. ERRoS: Energetic and Reactive Robotic Swarms
 ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot
 International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT
 T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
Distributed Control of Multi-Robot Teams: Cooperative Baton Passing Task
 Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Craig Barnes. Previous Work. Introduction. Tools for Programming Agents
 From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
Mechatronics Educational Robots Robko PHOENIX
 68 MECHATRONICS EDUCATIONAL ROBOTS ROBKO PHOENIX Mechatronics Educational Robots Robko PHOENIX N. Chivarov*, N. Shivarov* and P. Kopacek** *Central Laboratory of Mechatronics and Instrumentation, Bloc
68 MECHATRONICS EDUCATIONAL ROBOTS ROBKO PHOENIX Mechatronics Educational Robots Robko PHOENIX N. Chivarov*, N. Shivarov* and P. Kopacek** *Central Laboratory of Mechatronics and Instrumentation, Bloc
LASA I PRESS KIT lasa.epfl.ch I EPFL-STI-IMT-LASA Station 9 I CH 1015, Lausanne, Switzerland
 LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
WifiBotics. An Arduino Based Robotics Workshop
 WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
Abstract. 1. Introduction
 Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE
 EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE Mr. Hasani Burns Advisor: Dr. Chutima Boonthum-Denecke Hampton University Abstract This research explores the performance
EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE Mr. Hasani Burns Advisor: Dr. Chutima Boonthum-Denecke Hampton University Abstract This research explores the performance
Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot
 Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot Liwei Qi, Xingguo Yin, Haipeng Wang, Li Tao ABB Corporate Research China No. 31 Fu Te Dong San Rd.,
Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot Liwei Qi, Xingguo Yin, Haipeng Wang, Li Tao ABB Corporate Research China No. 31 Fu Te Dong San Rd.,
DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware. Andreas Pillekeit - dspace. Jonathan Brembeck DLR
 DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
A User Friendly Software Framework for Mobile Robot Control
 A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
A User Friendly Software Framework for Mobile Robot Control Jesse Riddle, Ryan Hughes, Nathaniel Biefeld, and Suranga Hettiarachchi Computer Science Department, Indiana University Southeast New Albany,
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Virtual Instrumentation Technologies for Hands-on Learning in Resourceconstrained
 1 Virtual Instrumentation Technologies for Hands-on Learning in Resourceconstrained Environments 2 Our Mission for Success We create innovative, computer-based products that improve everyday life LabVIEW
1 Virtual Instrumentation Technologies for Hands-on Learning in Resourceconstrained Environments 2 Our Mission for Success We create innovative, computer-based products that improve everyday life LabVIEW
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Incorporating a Software System for Robotics Control and Coordination in Mechatronics Curriculum and Research
 Paper ID #15300 Incorporating a Software System for Robotics Control and Coordination in Mechatronics Curriculum and Research Dr. Maged Mikhail, Purdue University - Calumet Dr. Maged B. Mikhail, Assistant
Paper ID #15300 Incorporating a Software System for Robotics Control and Coordination in Mechatronics Curriculum and Research Dr. Maged Mikhail, Purdue University - Calumet Dr. Maged B. Mikhail, Assistant
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin Liang1, 2, 3, d, *
 2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin
2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Sustainable & Intelligent Robotics Group Projects
 Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
An Integrated HMM-Based Intelligent Robotic Assembly System
 An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
II. ROBOT SYSTEMS ENGINEERING
 Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Picked by a robot. Behavior Trees for real world robotic applications in logistics
 Picked by a robot Behavior Trees for real world robotic applications in logistics Magazino GmbH Landsberger Str. 234 80687 München T +49-89-21552415-0 F +49-89-21552415-9 info@magazino.eu www.magazino.eu
Picked by a robot Behavior Trees for real world robotic applications in logistics Magazino GmbH Landsberger Str. 234 80687 München T +49-89-21552415-0 F +49-89-21552415-9 info@magazino.eu www.magazino.eu
Autonomous Self-Extending Machines for Accelerating Space Exploration
 Autonomous Self-Extending Machines for Accelerating Space Exploration NIAC CP 01-02 Phase I Hod Lipson, Evan Malone Cornell University Computational Motivation Robotic exploration has a long cycle time
Autonomous Self-Extending Machines for Accelerating Space Exploration NIAC CP 01-02 Phase I Hod Lipson, Evan Malone Cornell University Computational Motivation Robotic exploration has a long cycle time
DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT
 DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT Ranjani.R, M.Nandhini, G.Madhumitha Assistant Professor,Department of Mechatronics, SRM University,Kattankulathur,Chennai. ABSTRACT Library robot is an
DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT Ranjani.R, M.Nandhini, G.Madhumitha Assistant Professor,Department of Mechatronics, SRM University,Kattankulathur,Chennai. ABSTRACT Library robot is an
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities
 SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
ELECTRICAL ENGINEERING AND COMPUTER SCIENCE (EECS)
") ELECTRICAL ENGINEERING AND COMPUTER SCIENCE (EECS) DEPARTMENT CHAIR: B. Ross Barmish 407 Olin, 368-2802 E-mail: brb8@po.cwru.edu ASSOCIATE CHAIR FOR UNDERGRADUATE STUDIES Frank Merat 518 Glennan, 368-4572
ELECTRICAL ENGINEERING AND COMPUTER SCIENCE (EECS) DEPARTMENT CHAIR: B. Ross Barmish 407 Olin, 368-2802 E-mail: brb8@po.cwru.edu ASSOCIATE CHAIR FOR UNDERGRADUATE STUDIES Frank Merat 518 Glennan, 368-4572
Remote Control Based Hybrid-Structure Robot Design for Home Security Applications
 Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-15, 2006, Beijing, China Remote Control Based Hybrid-Structure Robot Design for Home Security Applications
Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-15, 2006, Beijing, China Remote Control Based Hybrid-Structure Robot Design for Home Security Applications
Implementation of a Self-Driven Robot for Remote Surveillance
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING
 THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
2014 New Jersey Core Curriculum Content Standards - Technology
 2014 New Jersey Core Curriculum Content Standards - Technology Content Area Standard Strand Grade Level bands Technology 8.2 Technology Education, Engineering, Design, and Computational Thinking - Programming:
2014 New Jersey Core Curriculum Content Standards - Technology Content Area Standard Strand Grade Level bands Technology 8.2 Technology Education, Engineering, Design, and Computational Thinking - Programming:
Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI
 Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI 53201 huangs@marquette.edu RESEARCH INTEREST: Dynamic systems. Analysis and physical
Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI 53201 huangs@marquette.edu RESEARCH INTEREST: Dynamic systems. Analysis and physical