Picked by a robot. Behavior Trees for real world robotic applications in logistics
|
|
|
- Violet McKenzie
- 5 years ago
- Views:
Transcription


1
2 Picked by a robot Behavior Trees for real world robotic applications in logistics Magazino GmbH Landsberger Str München T F info@magazino.eu

3





4 What is Magazino? Flexible, mobile picking robots for your warehouse Completely automated order picking Start-Up in the center of Munich Flexible robot solutions for intralogistics Quick integration and scalation, as well as cost savings




5 Customers and partners These companies trust Magazino Worldwide first order-picking-robot in live-operation at one of our customers. 3 Founders 13 Employees 90 Employees VDI Innovations Award Cellcom Next47 Investment 1. Customer Robot TORU Books Development partner Robot TORU Shoe boxes Development partner 3D vision system Object recognition Development partner Robot SOTO Cardboard boxes $25M Investment by Körber, Zalando, Fiege and Cellcom







6 Problems in the fulfillment sector Uncertainties set limits for automation Highly automated and fast production at Audi today Short contract periods Handling order peaks Unergonomic tasks Lack of qualified personnel Almost completely manual intralogistics in the same factory today



7 Robotics Technologies Comparison A huge step compared to traditional robotics + High precision & performance - Repetitive, predefined jobs - Deterministic tasks Sensor-based Behavior adaption and decisions at runtime Learning with artifical intelligence Cloud-based








8 Approaches by the automation industry Concepts at work right now Concept Products Manufacturer Goods-to-man Man-to-goods
9 Rigid concepts Why these concepts are not the final solution Main factor Goods-to-man High initial investment No flexibility No scalability Man-to-goods Human Hardware concepts only as support for humans High employee costs


10 Cooperative robots for intralogistics Magazino s solution for fulfillment and production supply TORU Pick-by-Robot for the fulfillment sector SOTO Supply-by-Robot for production lines
11 TORU Pick-by-Robot
12 TORU The robot for the E-commerce sector Rotating tower Integrated backpack Intelligent robot control Object recognition Distance sensors Different grasping technologies Laser safety zone

13


14 Advantages of TORU Flexible automation to save pick-costs 1 Item-specific handling 2 3 Integration into Working parallel to existing warehouse humans 4 Flexibility 5 Reduced laborand processcosts 6 New logistics concepts possible
15 SOTO Supply-by-Robot

16 SOTO The robot for production supply Rotating carrier with grasping technology Lights for display of driving direction Telescopic feature for grasping heights up to 2,45 m Rotating backpack shelf Distance sensors and safety features

17



18 Advantages of SOTO Saving costs through automated production supply 1 Flexibile gripping 2 Support for unergonomic tasks 3 Lower stock because of Justin-time delivery 4 Reduced laborand processcosts



19 Mechanical design The entire robot is designed internally by Magazino engineers
20 Electronic design Robot uses custom PCBs to dispatch power and interface with hardware


21 Electronic design The 3D mechanical drawing is augmented with all the cables Collisions, lengths and maximum bending are included PCB size and connectors placements are added in the CAD



22 Magazino robots are built internally We have a production department where robots are built and tested


23 Magazino robots are built internally We have a production department where robots are built and tested

24 Software architecture (ACROS) A unique framework architecture for perception-guided engineering that is generalizable to other robots and environments


25 Hardware abstraction A broad range of drivers decouples the upper software layers from the hardware, allowing the use of many different components

26 Robotics algorithms A suite of algorithms for interpreting sensor data provides the components for engineering robot applications

27 Task execution and monitoring Behavior Trees support the efficient modeling, execution, and supervision of highly reactive perception-guided robot applications
28

29 Perception/Grasping: How does the robot see the world?
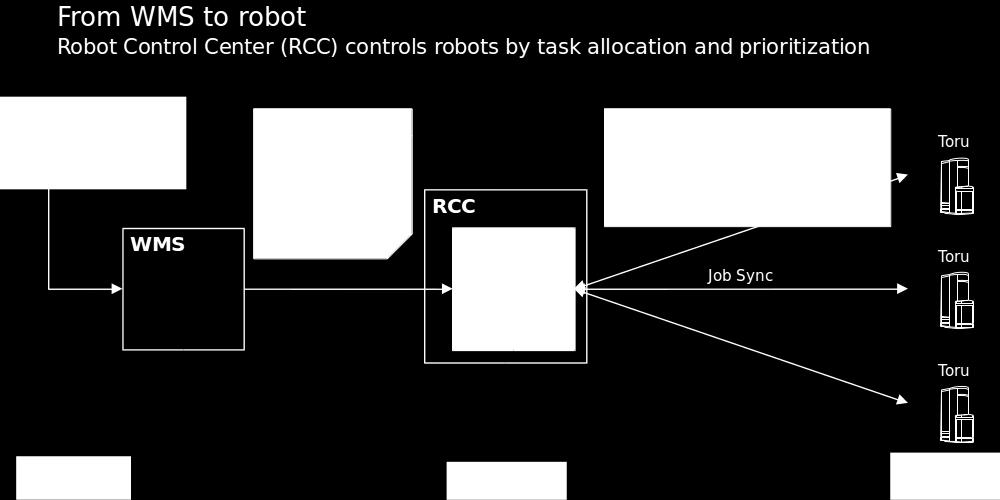
30 How to deal with the problem? Behavior Trees for real world robotic applications in logistics Magazino GmbH Landsberger Str München T F info@magazino.eu
31 The Robotic Problem Robots work in warehouses where humans work Robots are requested to move objects around (move I from A to B)
32 A simple problem but... Enormous amount of situations to be faced Different customers to handle Complaints coming from customers Multiple type of robots The system requires: Flexibility Adaptability Introspectability Reusability and scalability We were looking for an executor able to cope with such requirements.
33 Behavior Trees A Behavior Tree (BT) is a mathematical model of plan execution used in computer science, robotics, control systems and video games. They describe switchings between a finite set of tasks in a modular fashion. Their strength comes from their ability to create very complex tasks composed of simple tasks, without worrying how the simple tasks are implemented. wikipedia.org

34 Origin of Behavior Trees and Literature BTs originate as tool to model the behavior of NPCs They have been used in games such as Halo, Bioshock, and Spore First paper in literature: Handling Complexity in the Halo 2 AI, Isla D., GDC 2005 In robotics: Towards a Unified Behavior Trees Framework for Robot Control, Marzinotto et al., ICRA 2014 Controlling Process of Robots Having a Behavior Tree Architecture, Tenorth, European patent 2016 A good summary paper: Behavior Trees in Robotics and AI, Colledanchise and Ögren, arxiv preprint 2017
35 Main Concepts of BTs BTs are directed rooted trees where: Internal nodes (the ones with children) are called control flow nodes Decorator if only one child Composite if multiple children Leaf nodes (the ones without children) are called execution nodes Action if the node describes an action to be executed Condition if the node describes a condition to be verified Use the terminology of parent and children nodes The root node is the only one without parents
36 A Simple Case Scenario

37 A Behavior Tree for the Scenario Composites Decorator Condition Action
38 How is a Behavior Tree Executed? A BT starts its execution from the root node The root generates signals called ticks with a given frequency The ticks are propagated to the children following specific rules The child returns to the parent: Running, if its execution is under way Success if it has achieved its goal Failure otherwise Nodes can share information using a blackboard
39 Our Behavior Tree Execution
40 Behavior Trees at Magazino New execution semantics Memory Nodes Parallel One, Parallel Selector Recovery Check System Errors... ROS integration (Often conditions as topic listeners, actions as action clients) Copied and scoped variables Subtrees Watchdogs Controlling Process of Robots Having a Behavior Tree Architecture, Tenorth, European patent 2016
41 A More Robotic Behavior Tree

42 Behavior Tree Editor
43 An application of Behavior Trees Video navigation1
44 Why Behavior Trees? In comparison to Finite State Machines, BTs are much easier to adapt: new branches can be integrated into a BT by adding a single connection FSMs require connections for all permitted task transitions As Petri Nets are alternatives to FSMs emphasizing concurrency, BTs emphasize modularity Variables are copied and scoped, which is more manageable than having global variables BTs have a natural graphical representation that can be used for: editing robot behavior without programming visualizing the resulting behavior specification inspecting the state of the control program at execution time debugging behavior faults BTs are reactive to events: cheks at every tick instead of checking at the end of actions More pragmatic than planning: shortcuts can be applied more easily
45 Drawbacks of Behavior Trees BTs operate in a recursive manner. Computationally, this could produce stack overflows For each tick, a large number of checks might have to be performed over the state spaces Different subtrees in the tree might require different frequencies Hard to model mutually dependent parallel actions that share information Less powerful but more manageable than other execution frameworks (e.g., CRAM)
46 Summary Logistic environments full of: Enormous amount of scenarios to be faced Different customers to handle Complaints coming from customers Multiple type of robots We were looking for an executor able to cope with multiple requirements Behavior Trees gives us: Flexibility Adaptability Introspectability Reusability and scalability


47 We are looking for talents! Software/Robotics Software Architect in Python Autonomous Navigation Engineer Robot UI and Frontend Developer Robot Software Enthusiast Student Intern and others! More openings on


48 Thank you for your attention Your contact person at Magazino Dr. Guglielmo Gemignani Teamlead Behaviors & Reasoning Mail:
49

50 Join the team! For more details visit our website Team 1





51 Insights of Magazino

52 The KADO Vision System


53 Advantages of Kado 01 Recognize and meausure 02 Optimized grasping points 03 Recognition without teachingin objects 04 Easy and transparent organization

")
54 Robots move from production to testing area Full integration testing of hardware and software Reproduction of customer environment Automatic update of robot software over wifi Fake customer server sends requests to the robot New robots are tested using stable software New software is tested using a stable robot (confirmed to have working hardware) Video Demo1



55 Prototyping Hardware robots released every 4 months Electrical PCB and cabling released every 2 months Firmware running on PCB released every month Software released weekly Customer robots receives software updates every two weeks Video prototyping1

56 Cartographer: active collaboration between Google, Lyft, Magazino and Fetch

57 Remote robot visualization Robots live in a virtual world which is a replica of the customer warehouse The 3D visualization of the robot world is accessible over internet You can follow robots remotely! (let's try a live demo)

58 Customer statistics We collect data about speed and errors from every customer
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
SOFTWARE ARCHITECTURE
 SOFTWARE ARCHITECTURE Foundations, Theory, and Practice Richard N. Taylor University of California, Irvine Nenad Medvidovic University of Southern California Eric M. Dashofy The Aerospace Corporation WILEY
SOFTWARE ARCHITECTURE Foundations, Theory, and Practice Richard N. Taylor University of California, Irvine Nenad Medvidovic University of Southern California Eric M. Dashofy The Aerospace Corporation WILEY
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Artificial Intelligence and Robotics Getting More Human
 Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Great Minds. Internship Program IBM Research - China
 Internship Program 2017 Internship Program 2017 Jump Start Your Future at IBM Research China Introduction invites global candidates to apply for the 2017 Great Minds internship program located in Beijing
Internship Program 2017 Internship Program 2017 Jump Start Your Future at IBM Research China Introduction invites global candidates to apply for the 2017 Great Minds internship program located in Beijing
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Introduction to Computer Science - PLTW #9340
 Introduction to Computer Science - PLTW #9340 Description Designed to be the first computer science course for students who have never programmed before, Introduction to Computer Science (ICS) is an optional
Introduction to Computer Science - PLTW #9340 Description Designed to be the first computer science course for students who have never programmed before, Introduction to Computer Science (ICS) is an optional
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
ICT4 Manuf. Competence Center
 ICT4 Manuf. Competence Center Prof. Yacine Ouzrout University Lumiere Lyon 2 ICT 4 Manufacturing Competence Center AI and CPS for Manufacturing Robot software testing Development of software technologies
ICT4 Manuf. Competence Center Prof. Yacine Ouzrout University Lumiere Lyon 2 ICT 4 Manufacturing Competence Center AI and CPS for Manufacturing Robot software testing Development of software technologies
Advances and Perspectives in Health Information Standards
 Advances and Perspectives in Health Information Standards HL7 Brazil June 14, 2018 W. Ed Hammond. Ph.D., FACMI, FAIMBE, FIMIA, FHL7, FIAHSI Director, Duke Center for Health Informatics Director, Applied
Advances and Perspectives in Health Information Standards HL7 Brazil June 14, 2018 W. Ed Hammond. Ph.D., FACMI, FAIMBE, FIMIA, FHL7, FIAHSI Director, Duke Center for Health Informatics Director, Applied
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
5G ANTENNA TEST AND MEASUREMENT SYSTEMS OVERVIEW
 5G ANTENNA TEST AND MEASUREMENT SYSTEMS OVERVIEW MVG, AT THE FOREFRONT OF 5G WIRELESS CONNECTIVITY! VISION The connected society enabled by 5G Smart cities Internet of Things 5G lays the foundation for
5G ANTENNA TEST AND MEASUREMENT SYSTEMS OVERVIEW MVG, AT THE FOREFRONT OF 5G WIRELESS CONNECTIVITY! VISION The connected society enabled by 5G Smart cities Internet of Things 5G lays the foundation for
How do you teach AI the value of trust?
 How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Accelerating Collective Innovation: Investing in the Innovation Landscape
 PCB Executive Forum Accelerating Collective Innovation: Investing in the Innovation Landscape How a Major Player Uses Internal Venture Program to Accelerate Small Players with Big Ideas Dr. Joan K. Vrtis
PCB Executive Forum Accelerating Collective Innovation: Investing in the Innovation Landscape How a Major Player Uses Internal Venture Program to Accelerate Small Players with Big Ideas Dr. Joan K. Vrtis
Automation and Control Electrical Engineering
 Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
DiVA Digitala Vetenskapliga Arkivet
 DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
2018 Avanade Inc. All Rights Reserved.
 Microsoft Future Decoded 2018 November 6th Why AI Empowers Our Business Today Roberto Chinelli Data and Artifical Intelligence Market Unit Lead Avanade Roberto Chinelli Avanade Italy Data and AI Market
Microsoft Future Decoded 2018 November 6th Why AI Empowers Our Business Today Roberto Chinelli Data and Artifical Intelligence Market Unit Lead Avanade Roberto Chinelli Avanade Italy Data and AI Market
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Building a Better Battle The Halo 3 AI Objectives System
 11/8/12 Building a Better Battle The Halo 3 AI Objectives System Damián Isla Bungie Studios 1 Big Battle Technology Precombat Combat dialogue Ambient sound Scalable perception Flocking Encounter logic
11/8/12 Building a Better Battle The Halo 3 AI Objectives System Damián Isla Bungie Studios 1 Big Battle Technology Precombat Combat dialogue Ambient sound Scalable perception Flocking Encounter logic
Software Engineering: A Practitioner s Approach, 7/e. Slides copyright 1996, 2001, 2005, 2009 by Roger S. Pressman
 Chapter 9 Architectural Design Slide Set to accompany Software Engineering: A Practitioner s Approach, 7/e by Roger S. Pressman Slides copyright 1996, 2001, 2005, 2009 by Roger S. Pressman For non-profit
Chapter 9 Architectural Design Slide Set to accompany Software Engineering: A Practitioner s Approach, 7/e by Roger S. Pressman Slides copyright 1996, 2001, 2005, 2009 by Roger S. Pressman For non-profit
The secret behind mechatronics
 The secret behind mechatronics Why companies will want to be part of the revolution In the 18th century, steam and mechanization powered the first Industrial Revolution. At the turn of the 20th century,
The secret behind mechatronics Why companies will want to be part of the revolution In the 18th century, steam and mechanization powered the first Industrial Revolution. At the turn of the 20th century,
The robots are coming, but the humans aren't leaving
 The robots are coming, but the humans aren't leaving Fernando Aguirre de Oliveira Júnior Partner Services, Outsourcing & Automation Advisory May, 2017 Call it what you want, digital labor is no longer
The robots are coming, but the humans aren't leaving Fernando Aguirre de Oliveira Júnior Partner Services, Outsourcing & Automation Advisory May, 2017 Call it what you want, digital labor is no longer
Industry 4.0: the new challenge for the Italian textile machinery industry
 Industry 4.0: the new challenge for the Italian textile machinery industry Executive Summary June 2017 by Contacts: Economics & Press Office Ph: +39 02 4693611 email: economics-press@acimit.it ACIMIT has
Industry 4.0: the new challenge for the Italian textile machinery industry Executive Summary June 2017 by Contacts: Economics & Press Office Ph: +39 02 4693611 email: economics-press@acimit.it ACIMIT has
IT and Systems Science Transformational Impact on Technology, Society, Work, Life, Education, Training
 IT and Systems Science Transformational Impact on Technology, Society, Work, Life, Education, Training John S. Baras Institute for Systems Research and Dept. of Electrical and Computer Engin. University
IT and Systems Science Transformational Impact on Technology, Society, Work, Life, Education, Training John S. Baras Institute for Systems Research and Dept. of Electrical and Computer Engin. University
ReVRSR: Remote Virtual Reality for Service Robots
 ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
Open Source Voices Interview Series Podcast, Episode 03: How Is Open Source Important to the Future of Robotics? English Transcript
 [Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
[Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
MSc(CompSc) List of courses offered in
 List of courses offered in") Office of the MSc Programme in Computer Science Department of Computer Science The University of Hong Kong Pokfulam Road, Hong Kong. Tel: (+852) 3917 1828 Fax: (+852) 2547 4442 Email: msccs@cs.hku.hk (The
Office of the MSc Programme in Computer Science Department of Computer Science The University of Hong Kong Pokfulam Road, Hong Kong. Tel: (+852) 3917 1828 Fax: (+852) 2547 4442 Email: msccs@cs.hku.hk (The
CS 387/680: GAME AI DECISION MAKING. 4/19/2016 Instructor: Santiago Ontañón
 CS 387/680: GAME AI DECISION MAKING 4/19/2016 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2016/cs387/intro.html Reminders Check BBVista site
CS 387/680: GAME AI DECISION MAKING 4/19/2016 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2016/cs387/intro.html Reminders Check BBVista site
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Digitalization in Aker BP
 Digitalization in Aker BP Subsea Operations Conference 09.08.2018 Camilla Leon, Aker BP DIGITALIZATION IN AKER BP Solid footprint covering entire NCS Skarv (operator) Solid base performance and upside
Digitalization in Aker BP Subsea Operations Conference 09.08.2018 Camilla Leon, Aker BP DIGITALIZATION IN AKER BP Solid footprint covering entire NCS Skarv (operator) Solid base performance and upside
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning
 Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Knowledge Enhanced Electronic Logic for Embedded Intelligence
 The Problem Knowledge Enhanced Electronic Logic for Embedded Intelligence Systems (military, network, security, medical, transportation ) are getting more and more complex. In future systems, assets will
The Problem Knowledge Enhanced Electronic Logic for Embedded Intelligence Systems (military, network, security, medical, transportation ) are getting more and more complex. In future systems, assets will
UNIT-III LIFE-CYCLE PHASES
 INTRODUCTION: UNIT-III LIFE-CYCLE PHASES - If there is a well defined separation between research and development activities and production activities then the software is said to be in successful development
INTRODUCTION: UNIT-III LIFE-CYCLE PHASES - If there is a well defined separation between research and development activities and production activities then the software is said to be in successful development
Artificial Intelligence for Games
 Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Application of AI Technology to Industrial Revolution
 Application of AI Technology to Industrial Revolution By Dr. Suchai Thanawastien 1. What is AI? Artificial Intelligence or AI is a branch of computer science that tries to emulate the capabilities of learning,
Application of AI Technology to Industrial Revolution By Dr. Suchai Thanawastien 1. What is AI? Artificial Intelligence or AI is a branch of computer science that tries to emulate the capabilities of learning,
Pervasive Services Engineering for SOAs
 Pervasive Services Engineering for SOAs Dhaminda Abeywickrama (supervised by Sita Ramakrishnan) Clayton School of Information Technology, Monash University, Australia dhaminda.abeywickrama@infotech.monash.edu.au
Pervasive Services Engineering for SOAs Dhaminda Abeywickrama (supervised by Sita Ramakrishnan) Clayton School of Information Technology, Monash University, Australia dhaminda.abeywickrama@infotech.monash.edu.au
CSTA K- 12 Computer Science Standards: Mapped to STEM, Common Core, and Partnership for the 21 st Century Standards
 CSTA K- 12 Computer Science s: Mapped to STEM, Common Core, and Partnership for the 21 st Century s STEM Cluster Topics Common Core State s CT.L2-01 CT: Computational Use the basic steps in algorithmic
CSTA K- 12 Computer Science s: Mapped to STEM, Common Core, and Partnership for the 21 st Century s STEM Cluster Topics Common Core State s CT.L2-01 CT: Computational Use the basic steps in algorithmic
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Framework Programme 7
 Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
What could be driving the Lab of the future and is the Smart Lab really a thing?
 What could be driving the Lab of the future and is the Smart Lab really a thing? Paul Kendall Festo MedLab 28 February 2018 ELRIG Robotics & Automation, Esslingen near Stuttgart. 1 What s in store? Position
What could be driving the Lab of the future and is the Smart Lab really a thing? Paul Kendall Festo MedLab 28 February 2018 ELRIG Robotics & Automation, Esslingen near Stuttgart. 1 What s in store? Position
AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS
 AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS Vicent J. Botti Navarro Grupo de Tecnología Informática- Inteligencia Artificial Departamento de Sistemas Informáticos y Computación
AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS Vicent J. Botti Navarro Grupo de Tecnología Informática- Inteligencia Artificial Departamento de Sistemas Informáticos y Computación
1. Future Vision of Office Robot
 1. Future Vision of Office Robot 1.1 What is Office Robot? (1) Office Robot is the reliable partner for humans Office Robot does not steal our jobs but support us, constructing Win-Win relationship toward
1. Future Vision of Office Robot 1.1 What is Office Robot? (1) Office Robot is the reliable partner for humans Office Robot does not steal our jobs but support us, constructing Win-Win relationship toward
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
The future of work. Artificial Intelligence series
 The future of work Artificial Intelligence series The future of work March 2017 02 Cognition and the future of work We live in an era of unprecedented change. The world s population is expected to reach
The future of work Artificial Intelligence series The future of work March 2017 02 Cognition and the future of work We live in an era of unprecedented change. The world s population is expected to reach
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
Appendix A: Glossary of Key Terms and Definitions
 Appendix A: Glossary of Key Terms and Definitions Accident Adaptability Agility Ambiguity Analogy Architecture Assumption Augmented Reality Autonomous Vehicle Belief State Cloud Computing An undesirable,
Appendix A: Glossary of Key Terms and Definitions Accident Adaptability Agility Ambiguity Analogy Architecture Assumption Augmented Reality Autonomous Vehicle Belief State Cloud Computing An undesirable,
ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS
 ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS D. GUZZONI 1, C. BAUR 1, A. CHEYER 2 1 VRAI Group EPFL 1015 Lausanne Switzerland 2 AIC SRI International Menlo Park, CA USA Today computers are
ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS D. GUZZONI 1, C. BAUR 1, A. CHEYER 2 1 VRAI Group EPFL 1015 Lausanne Switzerland 2 AIC SRI International Menlo Park, CA USA Today computers are
Innovative Products Deserve Innovative Presentations. 3D Real-Time Visualization for the Industry
 Innovative Products Deserve Innovative Presentations 3D Real-Time Visualization for the Industry INTRODUCTION WHAT WE DO we sell software-based 3D real-time solutions we create visualizations either of
Innovative Products Deserve Innovative Presentations 3D Real-Time Visualization for the Industry INTRODUCTION WHAT WE DO we sell software-based 3D real-time solutions we create visualizations either of
Software Computer Vision - Driver Assistance
 Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Newsletter. Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2)
") www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
Latvia DATA DRIVEN PUBLIC SERVICE DELIVERY
 Latvia DATA DRIVEN PUBLIC SERVICE DELIVERY Edmunds Belskis Deputy State Secretary Ministry of Environmental Protection and Regional Development, Latvia 01 Digitally enabled nation Among global leaders
Latvia DATA DRIVEN PUBLIC SERVICE DELIVERY Edmunds Belskis Deputy State Secretary Ministry of Environmental Protection and Regional Development, Latvia 01 Digitally enabled nation Among global leaders
Innovation Report: The Manufacturing World Will Change Dramatically in the Next 5 Years: Here s How. mic-tec.com
 Innovation Report: The Manufacturing World Will Change Dramatically in the Next 5 Years: Here s How mic-tec.com Innovation Study 02 The Manufacturing World - The Next 5 Years Contents Part I Part II Part
Innovation Report: The Manufacturing World Will Change Dramatically in the Next 5 Years: Here s How mic-tec.com Innovation Study 02 The Manufacturing World - The Next 5 Years Contents Part I Part II Part
Industry 4.0. Advanced and integrated SAFETY tools for tecnhical plants
 Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Executive Summary Industry s Responsibility in Promoting Responsible Development and Use:
 Executive Summary Artificial Intelligence (AI) is a suite of technologies capable of learning, reasoning, adapting, and performing tasks in ways inspired by the human mind. With access to data and the
Executive Summary Artificial Intelligence (AI) is a suite of technologies capable of learning, reasoning, adapting, and performing tasks in ways inspired by the human mind. With access to data and the
MarineSIM : Robot Simulation for Marine Environments
 MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
NELA Brüder Neumeister GmbH
 Vision Inspection Systems NELA Brüder Neumeister GmbH Your Worldwide Partner for Automatic Optical Inspection and Sorting Systems see. control. automate. HISTORICAL MILESTONES 1938 Ernst and Bernhard Neumeister
Vision Inspection Systems NELA Brüder Neumeister GmbH Your Worldwide Partner for Automatic Optical Inspection and Sorting Systems see. control. automate. HISTORICAL MILESTONES 1938 Ernst and Bernhard Neumeister
What we are expecting from this presentation:
 What we are expecting from this presentation: A We want to inform you on the most important highlights from this topic D We exhort you to share with us a constructive feedback for further improvements
What we are expecting from this presentation: A We want to inform you on the most important highlights from this topic D We exhort you to share with us a constructive feedback for further improvements
USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION 1. INTRODUCTION
 USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION Brad Armstrong 1, Dana Gronau 2, Pavel Ikonomov 3, Alamgir Choudhury 4, Betsy Aller 5 1 Western Michigan University, Kalamazoo, Michigan;
USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION Brad Armstrong 1, Dana Gronau 2, Pavel Ikonomov 3, Alamgir Choudhury 4, Betsy Aller 5 1 Western Michigan University, Kalamazoo, Michigan;
Getting Started Guide
 SOLIDWORKS Getting Started Guide SOLIDWORKS Electrical FIRST Robotics Edition Alexander Ouellet 1/2/2015 Table of Contents INTRODUCTION... 1 What is SOLIDWORKS Electrical?... Error! Bookmark not defined.
SOLIDWORKS Getting Started Guide SOLIDWORKS Electrical FIRST Robotics Edition Alexander Ouellet 1/2/2015 Table of Contents INTRODUCTION... 1 What is SOLIDWORKS Electrical?... Error! Bookmark not defined.
Human-robotic cooperation In the light of Industry 4.0
 Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
EU regulatory system for robots
 EU regulatory system for robots CE marking of robots today and in the future Felicia Stoica DG GROW Summary Access to the EU market - marking for robots EU safety laws for robots and role of EN standards
EU regulatory system for robots CE marking of robots today and in the future Felicia Stoica DG GROW Summary Access to the EU market - marking for robots EU safety laws for robots and role of EN standards
Face the future of manufacturing. Visitor information
 Connecting Global Competence Face the future of manufacturing Visitor information The Leading Exhibition for Smart Automation and Robotics June 19 22, 2018 Munich automatica-munich.com automatica. Our
Connecting Global Competence Face the future of manufacturing Visitor information The Leading Exhibition for Smart Automation and Robotics June 19 22, 2018 Munich automatica-munich.com automatica. Our
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
2.6.1: Program Outcomes
 2.6.1: Program Outcomes Program: M.Sc. Informatics Program Specific Outcomes (PSO) PSO1 This program provides studies in the field of informatics, which is essentially a blend of three domains: networking,
2.6.1: Program Outcomes Program: M.Sc. Informatics Program Specific Outcomes (PSO) PSO1 This program provides studies in the field of informatics, which is essentially a blend of three domains: networking,
Gerrit Meixner Head of the Center for Human-Machine-Interaction (ZMMI)
") Introduction@DFKI Gerrit Meixner Head of the Center for Human-Machine-Interaction (ZMMI) Research Departement Innovative Factory Systems (IFS) German Research Center for Artificial Intelligence (DFKI)
Introduction@DFKI Gerrit Meixner Head of the Center for Human-Machine-Interaction (ZMMI) Research Departement Innovative Factory Systems (IFS) German Research Center for Artificial Intelligence (DFKI)
The Emerging Economy 2030:
 The Emerging Economy 2030: Some initial explorations Public Service Foresight Network 22 July 2016 2 THE HORIZONS FORESIGHT METHOD Identify the issue or problem of interest Consider the larger system(s)
The Emerging Economy 2030: Some initial explorations Public Service Foresight Network 22 July 2016 2 THE HORIZONS FORESIGHT METHOD Identify the issue or problem of interest Consider the larger system(s)
PLC-PROGRAMMING BY DEMONSTRATION USING GRASPABLE MODELS. Kai Schäfer, Willi Bruns
 PLC-PROGRAMMING BY DEMONSTRATION USING GRASPABLE MODELS Kai Schäfer, Willi Bruns University of Bremen Research Center Work Environment Technology (artec) Enrique Schmidt Str. 7 (SFG) D-28359 Bremen Fon:
PLC-PROGRAMMING BY DEMONSTRATION USING GRASPABLE MODELS Kai Schäfer, Willi Bruns University of Bremen Research Center Work Environment Technology (artec) Enrique Schmidt Str. 7 (SFG) D-28359 Bremen Fon:
Realizing Augmented Reality
 Realizing Augmented Reality By Amit Kore, Rahul Lanje and Raghu Burra Atos Syntel 1 Introduction Virtual Reality (VR) and Augmented Reality (AR) have been around for some time but there is renewed excitement,
Realizing Augmented Reality By Amit Kore, Rahul Lanje and Raghu Burra Atos Syntel 1 Introduction Virtual Reality (VR) and Augmented Reality (AR) have been around for some time but there is renewed excitement,
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Real-time Cooperative Behavior for Tactical Mobile Robot Teams. September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech
 Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Turtlebot Laser Tag. Jason Grant, Joe Thompson {jgrant3, University of Notre Dame Notre Dame, IN 46556
 Turtlebot Laser Tag Turtlebot Laser Tag was a collaborative project between Team 1 and Team 7 to create an interactive and autonomous game of laser tag. Turtlebots communicated through a central ROS server
Turtlebot Laser Tag Turtlebot Laser Tag was a collaborative project between Team 1 and Team 7 to create an interactive and autonomous game of laser tag. Turtlebots communicated through a central ROS server
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS
 EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
Emerging technology. Presentation by Dr Sudheer Singh Parwana 17th January 2019
 Emerging technology Presentation by Dr Sudheer Singh Parwana 17th January 2019 Mega trends 5 global shifts changing the way we live and do business Rapid urbanisation Today, more than half the world s
Emerging technology Presentation by Dr Sudheer Singh Parwana 17th January 2019 Mega trends 5 global shifts changing the way we live and do business Rapid urbanisation Today, more than half the world s
Grading Delays. We don t have permission to grade you (yet) We re working with tstaff on a solution We ll get grades back to you as soon as we can
 We re working with tstaff on a solution We ll get grades back to you as soon as we can") Grading Delays We don t have permission to grade you (yet) We re working with tstaff on a solution We ll get grades back to you as soon as we can Due next week: warmup2 retries dungeon_crawler1 extra retries
Grading Delays We don t have permission to grade you (yet) We re working with tstaff on a solution We ll get grades back to you as soon as we can Due next week: warmup2 retries dungeon_crawler1 extra retries
DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES
 DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Prof. Dr.-Ing. habil. Ansgar Trächtler Folie 1 DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Outline 1. Introduction
DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Prof. Dr.-Ing. habil. Ansgar Trächtler Folie 1 DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Outline 1. Introduction
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
DRAFT 2016 CSTA K-12 CS
 2016 CSTA K-12 CS Standards: Level 1 (Grades K-5) K-2 Locate and identify (using accurate terminology) computing, input, and output devices in a variety of environments (e.g., desktop and laptop computers,
2016 CSTA K-12 CS Standards: Level 1 (Grades K-5) K-2 Locate and identify (using accurate terminology) computing, input, and output devices in a variety of environments (e.g., desktop and laptop computers,
A Visit to Karen Casey. March 14, Engineering Fellow, Capabilities and Technology.
 A Visit to 2037 Karen Casey Engineering Fellow, Capabilities and Technology klcasey@raytheon.com March 14, 2017 Copyright 2017 Raytheon Company. Published by The Aerospace Corporation with permission.
A Visit to 2037 Karen Casey Engineering Fellow, Capabilities and Technology klcasey@raytheon.com March 14, 2017 Copyright 2017 Raytheon Company. Published by The Aerospace Corporation with permission.
>>> RALLY SAFETY SYSTEM
 >>> RALLY SAFETY SYSTEM Rally Safety System Complete rally monitoring system based on GPS and GLONASS satellite positioning technology, GPRS data transfer and advanced cloud server data processing. Online
>>> RALLY SAFETY SYSTEM Rally Safety System Complete rally monitoring system based on GPS and GLONASS satellite positioning technology, GPRS data transfer and advanced cloud server data processing. Online