COS Lecture 7 Autonomous Robot Navigation
|
|
|
- Liliana Golden
- 6 years ago
- Views:
Transcription
1 COS Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall Figures courtesy of Siegwart & Nourbakhsh
2 Control Structure Prior Knowledge Operator Commands Localization Cognition Perception Motion Control 2

3 Sensors 3 Courtesy of Siegwart & Nourbakhsh
4 Sensors: Outline 1. Sensors Overview 1. Sensor classifications 2. Sensor characteristics 2. Sensor Uncertainty 4
5 Sensor Classifications 5 Proprioceptive/Exteroceptive Sensors Proprioceptive sensors measure values internal to the robot (e.g. motor speed, heading, ) Exteroceptive sensors obtain information from the robots environment (e.g. distance to objects) Passive/Active Sensors Passive sensors use energy coming from the environment (e.g. temperature probe) Active sensors emit energy then measure the reaction (e.g. sonar)
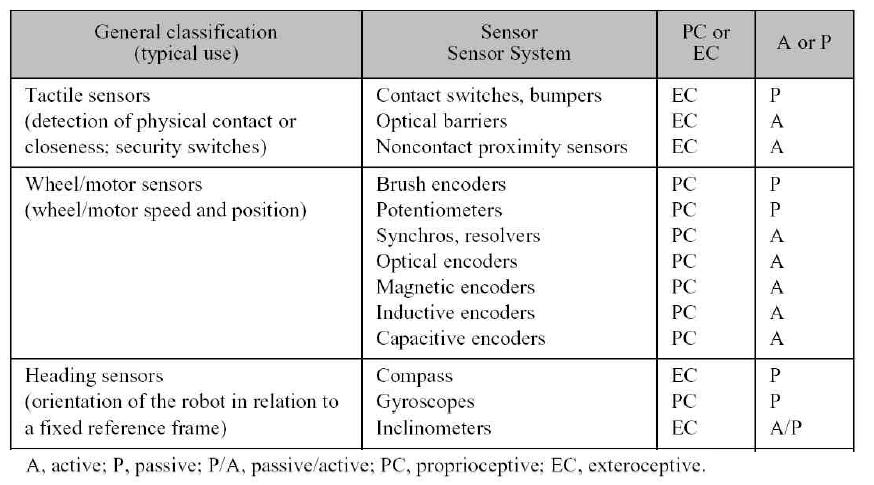
6 6 Sensor Classifications
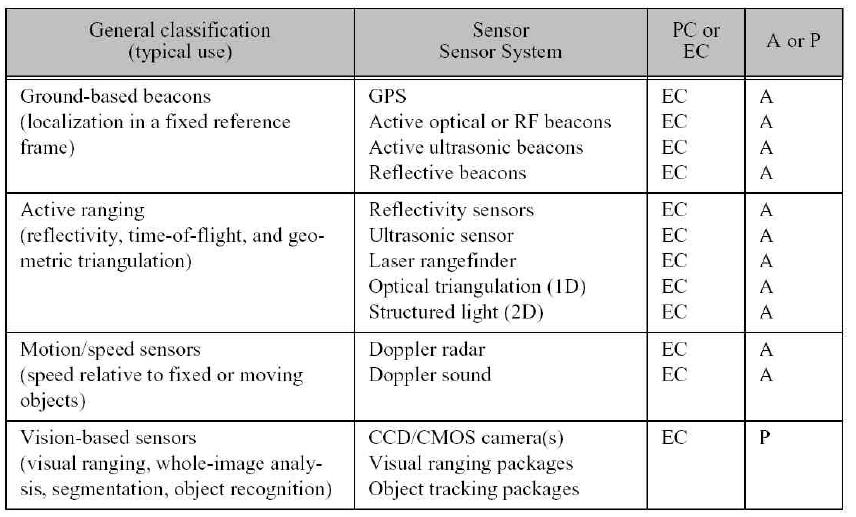
7 7 Sensor Classifications
8 Sensors: Basic Characteristics Range Lower and upper limits E.g. IR Range sensor measures distance between 10 and 80 cm. Resolution minimum difference between two measurements for digital sensors it is usually the A/D resolution. e.g. 5V / 255 (8 bit) = 0.02 V 8
9 Sensors: Basic Characteristics 9 Dynamic Range Used to measure spread between lower and upper limits of sensor inputs. Formally, it is the ratio between the maximum and minimum measurable input, usually in decibals (db) Dynamic Range = 10 log[ UpperLimit / LowerLimit ] E.g. A sonar Range sensor measures up to a max distance of 3m, with smallest measurement of 1cm. Dynamic Range = 10 log[ 3 / 0.01 ] = 24.8 db
10 Sensors: Basic Characteristics Linearity A measure of how linear the relationship between the sensor s output signal and input signal. Linearity is less important when signal is treated after with a computer 10
11 Sensors: Basic Characteristics Linearity Example Consider the range measurement from an IR range sensor. Let x be the actual measurement in meters, let y be the output from the sensor in volts, and y=f(x). y f(x) x 11 x
12 Sensors: Basic Characteristics 12 Bandwidth or Frequency The speed with which a sensor can provide a stream of readings Usually there is an upper limit depending on the sensor and the sampling rate E.g. sonar takes a long time to get a return signal. Higher frequencies are desired for autonomous control. E.g. if a GPS measurement occurs at 1 Hz and the autonomous vehicle uses this to avoid other vehicles that are 1 meter away.
13 Sensors: In Situ Characteristics 13 Sensitivity Ratio of output change to input change E.g. Range sensor will increase voltage output 0.1 V for every cm distance measured. Sensitivity itself is desirable, but might be coupled with sensitivity to other environment parameters. Cross-sensitivity Sensitivity to environmental parameters that are orthogonal to the target parameters E.g. some compasses are sensitive to the local environment.
14 Sensors: In Situ Characteristics Accuracy The difference between the sensor s output and the true value (i.e. error = m - v). accuracy = 1 m - v v m = measured value v = true value 14
15 Sensors: In Situ Characteristics Precision The reproducibility of sensor results. precision = range σ σ = standard deviation 15
16 Sensors: In Situ Characteristics Systematic Error Deterministic Caused by factors that can be modeled (e.g. optical distortion in camera.) Random Error Non-deterministic Not predictable Usually described probabilistically 16
17 Sensors: In Situ Characteristics Measurements in the real-world are dynamically changing and error-prone. Changing illuminations Light or sound absorbing surfaces Systematic versus random errors are not welldefined for mobile robots. There is a cross-sensitivity of robot sensor to robot pose and environment dynamics Difficult to model, appear to be random 17
18 Sensors: Outline 1. Sensors Overview 2. Sensor Uncertainty 18
19 Sensor Uncertainty How can it be represented? With probability distributions. 19
20 Sensor Uncertainty Representation Describe measurement as a random variable X Given a set of n measurements with values ρ I Characterize statistical properties of X with a probability density function f(x) 20
21 Sensor Uncertainty Expected value of X is the mean µ µ = E[X] = x f(x) dx - The variance of X is σ 2 σ 2 = Var(X) = (x - µ ) 2 f(x) dx - 21
22 Sensor Uncertainty Expected value of X is the mean µ n µ = E[X] = Σx n The variance of X is σ 2 n σ 2 = Var(X) = Σ(x - µ ) 2 n 22
23 Sensor Uncertainty Use a Gaussian Distribution f(x) = 1 exp - (x - µ) 2 σ 2π 2σ 2 23
24 Sensor Uncertainty How do we use the Gaussian? Learn the variance of sensor measurements ahead of time. Assume mean measurement is equal to actual measurement. Example: If a robot is 1.91 meters from a wall, what is the probability of getting a measurement of 2 meters? 24
25 Sensor Uncertainty Example cont : Answer if the sensor error is modeled as a Gaussian, we can assume the sensor has the following probability distribution: Then, use the distribution to determine P(x=2). P(x) P(x=2) x
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Signals, Instruments, and Systems W7. Embedded Systems General Concepts and
 Signals, Instruments, and Systems W7 Introduction to Hardware in Embedded Systems General Concepts and the e-puck Example Outline General concepts: autonomy, perception, p action, computation, communication
Signals, Instruments, and Systems W7 Introduction to Hardware in Embedded Systems General Concepts and the e-puck Example Outline General concepts: autonomy, perception, p action, computation, communication
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
USE OF BASIC ELECTRONIC MEASURING INSTRUMENTS Part II, & ANALYSIS OF MEASUREMENT ERROR 1
 EE 241 Experiment #3: USE OF BASIC ELECTRONIC MEASURING INSTRUMENTS Part II, & ANALYSIS OF MEASUREMENT ERROR 1 PURPOSE: To become familiar with additional the instruments in the laboratory. To become aware
EE 241 Experiment #3: USE OF BASIC ELECTRONIC MEASURING INSTRUMENTS Part II, & ANALYSIS OF MEASUREMENT ERROR 1 PURPOSE: To become familiar with additional the instruments in the laboratory. To become aware
MEM380 Applied Autonomous Robots I Fall Introduction to Sensors & Perception
 MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
Report 3. Kalman or Wiener Filters
 1 Embedded Systems WS 2014/15 Report 3: Kalman or Wiener Filters Stefan Feilmeier Facultatea de Inginerie Hermann Oberth Master-Program Embedded Systems Advanced Digital Signal Processing Methods Winter
1 Embedded Systems WS 2014/15 Report 3: Kalman or Wiener Filters Stefan Feilmeier Facultatea de Inginerie Hermann Oberth Master-Program Embedded Systems Advanced Digital Signal Processing Methods Winter
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Signals, Instruments, and Systems W6. Introduction to Embedded. Sensing, Communicating
 Signals, Instruments, and Systems W6 Introduction to Embedded Systems Computing, Sensing, Communicating Outline Embedded system terminology and key concepts Examples of embedded systems The Mica-z as example
Signals, Instruments, and Systems W6 Introduction to Embedded Systems Computing, Sensing, Communicating Outline Embedded system terminology and key concepts Examples of embedded systems The Mica-z as example
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
E190Q Lecture 15 Autonomous Robot Navigation
 E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
EE 451: Digital Signal Processing
 EE 451: Digital Signal Processing Stochastic Processes and Spectral Estimation Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 29, 2011 Aly El-Osery (NMT)
EE 451: Digital Signal Processing Stochastic Processes and Spectral Estimation Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 29, 2011 Aly El-Osery (NMT)
The fundamentals of detection theory
 Advanced Signal Processing: The fundamentals of detection theory Side 1 of 18 Index of contents: Advanced Signal Processing: The fundamentals of detection theory... 3 1 Problem Statements... 3 2 Detection
Advanced Signal Processing: The fundamentals of detection theory Side 1 of 18 Index of contents: Advanced Signal Processing: The fundamentals of detection theory... 3 1 Problem Statements... 3 2 Detection
UWB Channel Modeling
 Channel Modeling ETIN10 Lecture no: 9 UWB Channel Modeling Fredrik Tufvesson & Johan Kåredal, Department of Electrical and Information Technology fredrik.tufvesson@eit.lth.se 2011-02-21 Fredrik Tufvesson
Channel Modeling ETIN10 Lecture no: 9 UWB Channel Modeling Fredrik Tufvesson & Johan Kåredal, Department of Electrical and Information Technology fredrik.tufvesson@eit.lth.se 2011-02-21 Fredrik Tufvesson
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Channel Modeling ETI 085
 Channel Modeling ETI 085 Overview Lecture no: 9 What is Ultra-Wideband (UWB)? Why do we need UWB channel models? UWB Channel Modeling UWB channel modeling Standardized UWB channel models Fredrik Tufvesson
Channel Modeling ETI 085 Overview Lecture no: 9 What is Ultra-Wideband (UWB)? Why do we need UWB channel models? UWB Channel Modeling UWB channel modeling Standardized UWB channel models Fredrik Tufvesson
Objectives. Presentation Outline. Digital Modulation Revision
 Digital Modulation Revision Professor Richard Harris Objectives To identify the key points from the lecture material presented in the Digital Modulation section of this paper. What is in the examination
Digital Modulation Revision Professor Richard Harris Objectives To identify the key points from the lecture material presented in the Digital Modulation section of this paper. What is in the examination
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems
 Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
EE 451: Digital Signal Processing
 EE 451: Digital Signal Processing Power Spectral Density Estimation Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA December 4, 2017 Aly El-Osery (NMT) EE 451:
EE 451: Digital Signal Processing Power Spectral Density Estimation Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA December 4, 2017 Aly El-Osery (NMT) EE 451:
Digital data (a sequence of binary bits) can be transmitted by various pule waveforms.
 can be transmitted by various pule waveforms.") Chapter 2 Line Coding Digital data (a sequence of binary bits) can be transmitted by various pule waveforms. Sometimes these pulse waveforms have been called line codes. 2.1 Signalling Format Figure 2.1
Chapter 2 Line Coding Digital data (a sequence of binary bits) can be transmitted by various pule waveforms. Sometimes these pulse waveforms have been called line codes. 2.1 Signalling Format Figure 2.1
Correlation of Model Simulations and Measurements
 Correlation of Model Simulations and Measurements Roy Leventhal Leventhal Design & Communications Presented June 5, 2007 IBIS Summit Meeting, San Diego, California Correlation of Model Simulations and
Correlation of Model Simulations and Measurements Roy Leventhal Leventhal Design & Communications Presented June 5, 2007 IBIS Summit Meeting, San Diego, California Correlation of Model Simulations and
Unit 5 - Week 4 - Multipath Fading Environment
 2/29/207 Introduction to ireless and Cellular Communications - - Unit 5 - eek 4 - Multipath Fading Environment X Courses Unit 5 - eek 4 - Multipath Fading Environment Course outline How to access the portal
2/29/207 Introduction to ireless and Cellular Communications - - Unit 5 - eek 4 - Multipath Fading Environment X Courses Unit 5 - eek 4 - Multipath Fading Environment Course outline How to access the portal
Comm 502: Communication Theory
 Comm 50: Communication Theory Prof. Dean of the faculty of IET The German University in Cairo 1 COMM 50: Communication Theory Instructor: Ahmed El-Mahdy Office : C3.319 Lecture Time: Sat. nd Slot Office
Comm 50: Communication Theory Prof. Dean of the faculty of IET The German University in Cairo 1 COMM 50: Communication Theory Instructor: Ahmed El-Mahdy Office : C3.319 Lecture Time: Sat. nd Slot Office
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
CSE 151 Machine Learning. Instructor: Kamalika Chaudhuri
 CSE 151 Machine Learning Instructor: Kamalika Chaudhuri Probability Review Probabilistic Events and Outcomes Example: Sample space: set of all possible outcomes of an experiment Event: subspace of a sample
CSE 151 Machine Learning Instructor: Kamalika Chaudhuri Probability Review Probabilistic Events and Outcomes Example: Sample space: set of all possible outcomes of an experiment Event: subspace of a sample
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Lecture: Sensors , Fall 2008
 All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
Narrow- and wideband channels
 RADIO SYSTEMS ETIN15 Lecture no: 3 Narrow- and wideband channels Ove Edfors, Department of Electrical and Information technology Ove.Edfors@eit.lth.se 2012-03-19 Ove Edfors - ETIN15 1 Contents Short review
RADIO SYSTEMS ETIN15 Lecture no: 3 Narrow- and wideband channels Ove Edfors, Department of Electrical and Information technology Ove.Edfors@eit.lth.se 2012-03-19 Ove Edfors - ETIN15 1 Contents Short review
Lecture 4: Digital representation and data analysis
 Instrumentation and data acquisition Spring 010 Lecture 4: Digital representation and data analysis Zheng-Hua Tan Multimedia Information and Signal Processing Department of Electronic Systems Aalborg University,
Instrumentation and data acquisition Spring 010 Lecture 4: Digital representation and data analysis Zheng-Hua Tan Multimedia Information and Signal Processing Department of Electronic Systems Aalborg University,
Localisation et navigation de robots
 Localisation et navigation de robots UPJV, Département EEA M2 EEAII, parcours ViRob Année Universitaire 2017/2018 Fabio MORBIDI Laboratoire MIS Équipe Perception ique E-mail: fabio.morbidi@u-picardie.fr
Localisation et navigation de robots UPJV, Département EEA M2 EEAII, parcours ViRob Année Universitaire 2017/2018 Fabio MORBIDI Laboratoire MIS Équipe Perception ique E-mail: fabio.morbidi@u-picardie.fr
Problem Sheet 1 Probability, random processes, and noise
 Problem Sheet 1 Probability, random processes, and noise 1. If F X (x) is the distribution function of a random variable X and x 1 x 2, show that F X (x 1 ) F X (x 2 ). 2. Use the definition of the cumulative
Problem Sheet 1 Probability, random processes, and noise 1. If F X (x) is the distribution function of a random variable X and x 1 x 2, show that F X (x 1 ) F X (x 2 ). 2. Use the definition of the cumulative
Event-based Algorithms for Robust and High-speed Robotics
 Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Week 15. Mechanical Waves
 Chapter 15 Week 15. Mechanical Waves 15.1 Lecture - Mechanical Waves In this lesson, we will study mechanical waves in the form of a standing wave on a vibrating string. Because it is the last week of
Chapter 15 Week 15. Mechanical Waves 15.1 Lecture - Mechanical Waves In this lesson, we will study mechanical waves in the form of a standing wave on a vibrating string. Because it is the last week of
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
HG4930 INERTIAL MEASUREMENT UNIT (IMU) Performance and Environmental Information
 Performance and Environmental Information") HG493 INERTIAL MEASUREMENT UNIT () Performance and Environmental Information HG493 Performance and Environmental Information aerospace.honeywell.com/hg493 2 Table of Contents 4 4 5 5 6 7 8 9 9 9 Honeywell
HG493 INERTIAL MEASUREMENT UNIT () Performance and Environmental Information HG493 Performance and Environmental Information aerospace.honeywell.com/hg493 2 Table of Contents 4 4 5 5 6 7 8 9 9 9 Honeywell
Mobile Radio Propagation Channel Models
 Wireless Information Transmission System Lab. Mobile Radio Propagation Channel Models Institute of Communications Engineering National Sun Yat-sen University Table of Contents Introduction Propagation
Wireless Information Transmission System Lab. Mobile Radio Propagation Channel Models Institute of Communications Engineering National Sun Yat-sen University Table of Contents Introduction Propagation
Random Walk Technique: Measuring EME in Below-Deck Complex Cavities
 NAVAL SURFACE WARFARE CENTER DAHLGREN DIVISION Random Walk Technique: Measuring EME in Below-Deck Complex Cavities Presented by: Mike Slocum & Greg Tait E 3 Assessment & Evaluation Branch (Q52) 22 August
NAVAL SURFACE WARFARE CENTER DAHLGREN DIVISION Random Walk Technique: Measuring EME in Below-Deck Complex Cavities Presented by: Mike Slocum & Greg Tait E 3 Assessment & Evaluation Branch (Q52) 22 August
Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, 77. Table of Contents 1
 Efficient single photon detection from 500 nm to 5 μm wavelength: Supporting Information F. Marsili 1, F. Bellei 1, F. Najafi 1, A. E. Dane 1, E. A. Dauler 2, R. J. Molnar 2, K. K. Berggren 1* 1 Department
Efficient single photon detection from 500 nm to 5 μm wavelength: Supporting Information F. Marsili 1, F. Bellei 1, F. Najafi 1, A. E. Dane 1, E. A. Dauler 2, R. J. Molnar 2, K. K. Berggren 1* 1 Department
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
On the GNSS integer ambiguity success rate
 On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
EITN85, FREDRIK TUFVESSON, JOHAN KÅREDAL ELECTRICAL AND INFORMATION TECHNOLOGY. Why do we need UWB channel models?
 Wireless Communication Channels Lecture 9:UWB Channel Modeling EITN85, FREDRIK TUFVESSON, JOHAN KÅREDAL ELECTRICAL AND INFORMATION TECHNOLOGY Overview What is Ultra-Wideband (UWB)? Why do we need UWB channel
Wireless Communication Channels Lecture 9:UWB Channel Modeling EITN85, FREDRIK TUFVESSON, JOHAN KÅREDAL ELECTRICAL AND INFORMATION TECHNOLOGY Overview What is Ultra-Wideband (UWB)? Why do we need UWB channel
EENG473 Mobile Communications Module 3 : Week # (12) Mobile Radio Propagation: Small-Scale Path Loss
 Mobile Radio Propagation: Small-Scale Path Loss") EENG473 Mobile Communications Module 3 : Week # (12) Mobile Radio Propagation: Small-Scale Path Loss Introduction Small-scale fading is used to describe the rapid fluctuation of the amplitude of a radio
EENG473 Mobile Communications Module 3 : Week # (12) Mobile Radio Propagation: Small-Scale Path Loss Introduction Small-scale fading is used to describe the rapid fluctuation of the amplitude of a radio
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
SPREAD SPECTRUM CHANNEL MEASUREMENT INSTRUMENT
 SPACE SPREAD SPECTRUM CHANNEL MEASUREMENT INSTRUMENT Satellite communications, earth observation, navigation and positioning and control stations indracompany.com SSCMI SPREAD SPECTRUM CHANNEL MEASUREMENT
SPACE SPREAD SPECTRUM CHANNEL MEASUREMENT INSTRUMENT Satellite communications, earth observation, navigation and positioning and control stations indracompany.com SSCMI SPREAD SPECTRUM CHANNEL MEASUREMENT
Wireless Physical Layer Concepts: Part II
 Wireless Physical Layer Concepts: Part II Raj Jain Professor of CSE Washington University in Saint Louis Saint Louis, MO 63130 Jain@cse.wustl.edu Audio/Video recordings of this lecture are available at:
Wireless Physical Layer Concepts: Part II Raj Jain Professor of CSE Washington University in Saint Louis Saint Louis, MO 63130 Jain@cse.wustl.edu Audio/Video recordings of this lecture are available at:
Physics 2310 Lab #6: Multiple Thin Lenses Dr. Michael Pierce (Univ. of Wyoming)
") Physics 2310 Lab #6: Multiple Thin Lenses Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to investigate the properties of multiple thin lenses. The primary goals are to understand
Physics 2310 Lab #6: Multiple Thin Lenses Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to investigate the properties of multiple thin lenses. The primary goals are to understand
Today s menu. Last lecture. Series mode interference. Noise and interferences R/2 V SM Z L. E Th R/2. Voltage transmission system
 Last lecture Introduction to statistics s? Random? Deterministic? Probability density functions and probabilities? Properties of random signals. Today s menu Effects of noise and interferences in measurement
Last lecture Introduction to statistics s? Random? Deterministic? Probability density functions and probabilities? Properties of random signals. Today s menu Effects of noise and interferences in measurement
Satellite Communications: Part 4 Signal Distortions & Errors and their Relation to Communication Channel Specifications. Howard Hausman April 1, 2010
 Satellite Communications: Part 4 Signal Distortions & Errors and their Relation to Communication Channel Specifications Howard Hausman April 1, 2010 Satellite Communications: Part 4 Signal Distortions
Satellite Communications: Part 4 Signal Distortions & Errors and their Relation to Communication Channel Specifications Howard Hausman April 1, 2010 Satellite Communications: Part 4 Signal Distortions
Empirical Path Loss Models
 Empirical Path Loss Models 1 Free space and direct plus reflected path loss 2 Hata model 3 Lee model 4 Other models 5 Examples Levis, Johnson, Teixeira (ESL/OSU) Radiowave Propagation August 17, 2018 1
Empirical Path Loss Models 1 Free space and direct plus reflected path loss 2 Hata model 3 Lee model 4 Other models 5 Examples Levis, Johnson, Teixeira (ESL/OSU) Radiowave Propagation August 17, 2018 1
Ultra Wideband Radio Propagation Measurement, Characterization and Modeling
 Ultra Wideband Radio Propagation Measurement, Characterization and Modeling Rachid Saadane rachid.saadane@gmail.com GSCM LRIT April 14, 2007 achid Saadane rachid.saadane@gmail.com ( GSCM Ultra Wideband
Ultra Wideband Radio Propagation Measurement, Characterization and Modeling Rachid Saadane rachid.saadane@gmail.com GSCM LRIT April 14, 2007 achid Saadane rachid.saadane@gmail.com ( GSCM Ultra Wideband
ETSF15 Physical layer communication. Stefan Höst
 ETSF15 Physical layer communication Stefan Höst Physical layer Analog vs digital (Previous lecture) Transmission media Modulation Represent digital data in a continuous world Disturbances, Noise and distortion
ETSF15 Physical layer communication Stefan Höst Physical layer Analog vs digital (Previous lecture) Transmission media Modulation Represent digital data in a continuous world Disturbances, Noise and distortion
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Wireless Communication: Concepts, Techniques, and Models. Hongwei Zhang
 Wireless Communication: Concepts, Techniques, and Models Hongwei Zhang http://www.cs.wayne.edu/~hzhang Outline Digital communication over radio channels Channel capacity MIMO: diversity and parallel channels
Wireless Communication: Concepts, Techniques, and Models Hongwei Zhang http://www.cs.wayne.edu/~hzhang Outline Digital communication over radio channels Channel capacity MIMO: diversity and parallel channels
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Sensor Data Fusion Using Kalman Filter
 Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
EE 435/535: Error Correcting Codes Project 1, Fall 2009: Extended Hamming Code. 1 Introduction. 2 Extended Hamming Code: Encoding. 1.
 EE 435/535: Error Correcting Codes Project 1, Fall 2009: Extended Hamming Code Project #1 is due on Tuesday, October 6, 2009, in class. You may turn the project report in early. Late projects are accepted
EE 435/535: Error Correcting Codes Project 1, Fall 2009: Extended Hamming Code Project #1 is due on Tuesday, October 6, 2009, in class. You may turn the project report in early. Late projects are accepted
Satellite Navigation Principle and performance of GPS receivers
 Satellite Navigation Principle and performance of GPS receivers AE4E08 GPS Block IIF satellite Boeing North America Christian Tiberius Course 2010 2011, lecture 3 Today s topics Introduction basic idea
Satellite Navigation Principle and performance of GPS receivers AE4E08 GPS Block IIF satellite Boeing North America Christian Tiberius Course 2010 2011, lecture 3 Today s topics Introduction basic idea
Lecture 3. Optical Noise. Lecture 3. Noise in Optical Amplification. Noise Spectrum. Noise Figure
 in Sources Power Factor Limit Optical ECE 185 Lasers and Modulators Lab - Spring 2018 1 in Sources Power Factor Limit We treat noise on a per mode basis Total noise is then noise/mode number of modes An
in Sources Power Factor Limit Optical ECE 185 Lasers and Modulators Lab - Spring 2018 1 in Sources Power Factor Limit We treat noise on a per mode basis Total noise is then noise/mode number of modes An
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Hedonic Coalition Formation for Distributed Task Allocation among Wireless Agents
 Hedonic Coalition Formation for Distributed Task Allocation among Wireless Agents Walid Saad, Zhu Han, Tamer Basar, Me rouane Debbah, and Are Hjørungnes. IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10,
Hedonic Coalition Formation for Distributed Task Allocation among Wireless Agents Walid Saad, Zhu Han, Tamer Basar, Me rouane Debbah, and Are Hjørungnes. IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10,
Dynamically Configured Waveform-Agile Sensor Systems
 Dynamically Configured Waveform-Agile Sensor Systems Antonia Papandreou-Suppappola in collaboration with D. Morrell, D. Cochran, S. Sira, A. Chhetri Arizona State University June 27, 2006 Supported by
Dynamically Configured Waveform-Agile Sensor Systems Antonia Papandreou-Suppappola in collaboration with D. Morrell, D. Cochran, S. Sira, A. Chhetri Arizona State University June 27, 2006 Supported by
Low-Cost Localization of Mobile Robots Through Probabilistic Sensor Fusion
 Low-Cost Localization of Mobile Robots Through Probabilistic Sensor Fusion Brian Chung December, Abstract Efforts to achieve mobile robotic localization have relied on probabilistic techniques such as
Low-Cost Localization of Mobile Robots Through Probabilistic Sensor Fusion Brian Chung December, Abstract Efforts to achieve mobile robotic localization have relied on probabilistic techniques such as
Goals of the Lab: Photodetectors and Noise (Part 2) Department of Physics. Slide 1. PHYSICS6770 Laboratory 4
 Department of Physics. Slide 1. PHYSICS6770 Laboratory 4") Slide 1 Goals of the Lab: Understand the origin and properties of thermal noise Understand the origin and properties of optical shot noise In this lab, You will qualitatively and quantitatively determine
Slide 1 Goals of the Lab: Understand the origin and properties of thermal noise Understand the origin and properties of optical shot noise In this lab, You will qualitatively and quantitatively determine
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
CMPUT 412 Introduction. Csaba Szepesvári University of Alberta
 CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
CMPUT 412 Introduction Csaba Szepesvári University of Alberta Table of contents Admin Robots Basics of control Robot design Admin Teams: Not yet assembled (next week) Rotational scheme First lab: Learn
ECEN720: High-Speed Links Circuits and Systems Spring 2017
 ECEN720: High-Speed Links Circuits and Systems Spring 2017 Lecture 9: Noise Sources Sam Palermo Analog & Mixed-Signal Center Texas A&M University Announcements Lab 5 Report and Prelab 6 due Apr. 3 Stateye
ECEN720: High-Speed Links Circuits and Systems Spring 2017 Lecture 9: Noise Sources Sam Palermo Analog & Mixed-Signal Center Texas A&M University Announcements Lab 5 Report and Prelab 6 due Apr. 3 Stateye
Comparing Means. Chapter 24. Case Study Gas Mileage for Classes of Vehicles. Case Study Gas Mileage for Classes of Vehicles Data collection
 Chapter 24 One-Way Analysis of Variance: Comparing Several Means BPS - 5th Ed. Chapter 24 1 Comparing Means Chapter 18: compared the means of two populations or the mean responses to two treatments in
Chapter 24 One-Way Analysis of Variance: Comparing Several Means BPS - 5th Ed. Chapter 24 1 Comparing Means Chapter 18: compared the means of two populations or the mean responses to two treatments in
King Fahd University of Petroleum & Minerals Computer Engineering Dept
 King Fahd University of Petroleum & Minerals Computer Engineering Dept COE 543 Mobile and Wireless Networks Term 0 Dr. Ashraf S. Hasan Mahmoud Rm -148-3 Ext. 174 Email: ashraf@ccse.kfupm.edu.sa 4//003
King Fahd University of Petroleum & Minerals Computer Engineering Dept COE 543 Mobile and Wireless Networks Term 0 Dr. Ashraf S. Hasan Mahmoud Rm -148-3 Ext. 174 Email: ashraf@ccse.kfupm.edu.sa 4//003
Receiver Design for Passive Millimeter Wave (PMMW) Imaging
 Imaging") Introduction Receiver Design for Passive Millimeter Wave (PMMW) Imaging Millimeter Wave Systems, LLC Passive Millimeter Wave (PMMW) sensors are used for remote sensing and security applications. They rely
Introduction Receiver Design for Passive Millimeter Wave (PMMW) Imaging Millimeter Wave Systems, LLC Passive Millimeter Wave (PMMW) sensors are used for remote sensing and security applications. They rely
THE IMPACT OF SIGNAL MODEL DATA COMPRESSION FOR TDOA/FDOA ESTIMATION
 THE IMPACT OF SIGNAL MODEL DATA COMPRESSION FOR TDOA/FDOA ESTIMATION Mark L. Fowler & Xi Hu Department of Electrical & Computer Engineering State University of New York at Binghamton SPIE 2008 San Diego,
THE IMPACT OF SIGNAL MODEL DATA COMPRESSION FOR TDOA/FDOA ESTIMATION Mark L. Fowler & Xi Hu Department of Electrical & Computer Engineering State University of New York at Binghamton SPIE 2008 San Diego,
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
771 Series LASER SPECTRUM ANALYZER. The Power of Precision in Spectral Analysis. It's Our Business to be Exact! bristol-inst.com
 771 Series LASER SPECTRUM ANALYZER The Power of Precision in Spectral Analysis It's Our Business to be Exact! bristol-inst.com The 771 Series Laser Spectrum Analyzer combines proven Michelson interferometer
771 Series LASER SPECTRUM ANALYZER The Power of Precision in Spectral Analysis It's Our Business to be Exact! bristol-inst.com The 771 Series Laser Spectrum Analyzer combines proven Michelson interferometer
Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming)
") Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to introduce students to some of the properties of thin lenses and mirrors.
Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to introduce students to some of the properties of thin lenses and mirrors.
Computer Vision, Lecture 3
 Computer Vision, Lecture 3 Professor Hager http://www.cs.jhu.edu/~hager /4/200 CS 46, Copyright G.D. Hager Outline for Today Image noise Filtering by Convolution Properties of Convolution /4/200 CS 46,
Computer Vision, Lecture 3 Professor Hager http://www.cs.jhu.edu/~hager /4/200 CS 46, Copyright G.D. Hager Outline for Today Image noise Filtering by Convolution Properties of Convolution /4/200 CS 46,
Study guide for Graduate Computer Vision
 Study guide for Graduate Computer Vision Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 November 23, 2011 Abstract 1 1. Know Bayes rule. What
Study guide for Graduate Computer Vision Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 November 23, 2011 Abstract 1 1. Know Bayes rule. What
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, ISIF 126
 12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, 2009 978-0-9824438-0-4 2009 ISIF 126 with x s denoting the known satellite position. ρ e shall be used to model the errors
12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, 2009 978-0-9824438-0-4 2009 ISIF 126 with x s denoting the known satellite position. ρ e shall be used to model the errors
Lecture 3 Concepts for the Data Communications and Computer Interconnection
 Lecture 3 Concepts for the Data Communications and Computer Interconnection Aim: overview of existing methods and techniques Terms used: -Data entities conveying meaning (of information) -Signals data
Lecture 3 Concepts for the Data Communications and Computer Interconnection Aim: overview of existing methods and techniques Terms used: -Data entities conveying meaning (of information) -Signals data
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
II. Random Processes Review
 II. Random Processes Review - [p. 2] RP Definition - [p. 3] RP stationarity characteristics - [p. 7] Correlation & cross-correlation - [p. 9] Covariance and cross-covariance - [p. 10] WSS property - [p.
II. Random Processes Review - [p. 2] RP Definition - [p. 3] RP stationarity characteristics - [p. 7] Correlation & cross-correlation - [p. 9] Covariance and cross-covariance - [p. 10] WSS property - [p.
ON WAVEFORM SELECTION IN A TIME VARYING SONAR ENVIRONMENT
 ON WAVEFORM SELECTION IN A TIME VARYING SONAR ENVIRONMENT Ashley I. Larsson 1* and Chris Gillard 1 (1) Maritime Operations Division, Defence Science and Technology Organisation, Edinburgh, Australia Abstract
ON WAVEFORM SELECTION IN A TIME VARYING SONAR ENVIRONMENT Ashley I. Larsson 1* and Chris Gillard 1 (1) Maritime Operations Division, Defence Science and Technology Organisation, Edinburgh, Australia Abstract
Chapter 2 Sensors. The Author(s) 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2
 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2") Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
Unit 8 - Week 7 - Computer simulation of Rayleigh fading, Antenna Diversity
 X Courses» Introduction to Wireless and Cellular Communications Announcements Course Forum Progress Mentor Unit 8 - Week 7 - Computer simulation of Rayleigh fading, Antenna Diversity Course outline How
X Courses» Introduction to Wireless and Cellular Communications Announcements Course Forum Progress Mentor Unit 8 - Week 7 - Computer simulation of Rayleigh fading, Antenna Diversity Course outline How
The Impact of a Wideband Channel on UWB System Design
 EE209AS Spring 2011 Prof. Danijela Cabric Paper Presentation Presented by: Sina Basir-Kazeruni sinabk@ucla.edu The Impact of a Wideband Channel on UWB System Design by Mike S. W. Chen and Robert W. Brodersen
EE209AS Spring 2011 Prof. Danijela Cabric Paper Presentation Presented by: Sina Basir-Kazeruni sinabk@ucla.edu The Impact of a Wideband Channel on UWB System Design by Mike S. W. Chen and Robert W. Brodersen
On Kalman Filtering. The 1960s: A Decade to Remember
 On Kalman Filtering A study of A New Approach to Linear Filtering and Prediction Problems by R. E. Kalman Mehul Motani February, 000 The 960s: A Decade to Remember Rudolf E. Kalman in 960 Research Institute
On Kalman Filtering A study of A New Approach to Linear Filtering and Prediction Problems by R. E. Kalman Mehul Motani February, 000 The 960s: A Decade to Remember Rudolf E. Kalman in 960 Research Institute
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Robot Mapping. Introduction to Robot Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Uncertainty Considerations In Spherical Near-field Antenna Measurements
 Uncertainty Considerations In Spherical Near-field Antenna Measurements Phil Miller National Physical Laboratory Industry & Innovation Division Teddington, United Kingdom Outline Introduction and Spherical
Uncertainty Considerations In Spherical Near-field Antenna Measurements Phil Miller National Physical Laboratory Industry & Innovation Division Teddington, United Kingdom Outline Introduction and Spherical
Lecture #6: Analog-to-Digital Converter
 Lecture #6: Analog-to-Digital Converter All electrical signals in the real world are analog, and their waveforms are continuous in time. Since most signal processing is done digitally in discrete time,
Lecture #6: Analog-to-Digital Converter All electrical signals in the real world are analog, and their waveforms are continuous in time. Since most signal processing is done digitally in discrete time,