The Autonomous Robots Lab. Kostas Alexis
|
|
|
- Amberly Hopkins
- 6 years ago
- Views:
Transcription
1 The Autonomous Robots Lab Kostas Alexis








2 Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate Researchers From summer 2017: 1 more Senior Postdoctoral Researcher and 1 more PhD Candidate




3 What s our vision? From Capek s R.U.R. to Asimov s Robot Visions, robots are considered perfected workers. Either in dystopic or utopic future projections, humanity has envisioned the dream of a robotized world, a world that work is conducted by robots. How far away are we? Robotics can assist societal needs for sustainable and scalable growth, quality of life, scientific exploration and more. Given that we deal with the challenges involved. To do so in large scale, robotic systems have to be autonomous regarding their navigation, operation and task handling. Autonomy is the key. Within that, currently perception and planning are the two urgent needs.


4 Autonomy is the Key An autonomous robot relies on the robust and reliable operation and interconnection of its onboard perception, planning and control loops. For robust autonomy we search for a tightly closed perception-planning-control loop. Therefore, the research of the lab focuses on these fields simultaneously and aims to investigate their correlations and interdependencies. Broader goal: Robustly Autonomous Ubiquitous Robots
5 Robot Configuration
6 Research Activities of the lab With the broader goal being that of robust autonomy, the specific research directions are: In terms of topic Autonomous Navigation, Exploration and Mapping Multi-Modal Localization and Mapping in Visuallydegraded Environments Robust Control Systems In terms of robotic systems Aerial (primarily) Ground (intelligent transportation systems) Maritime In terms of applications Infrastructure Inspection and Monitoring Radiation Mapping Environmental Monitoring Driverless car technology more
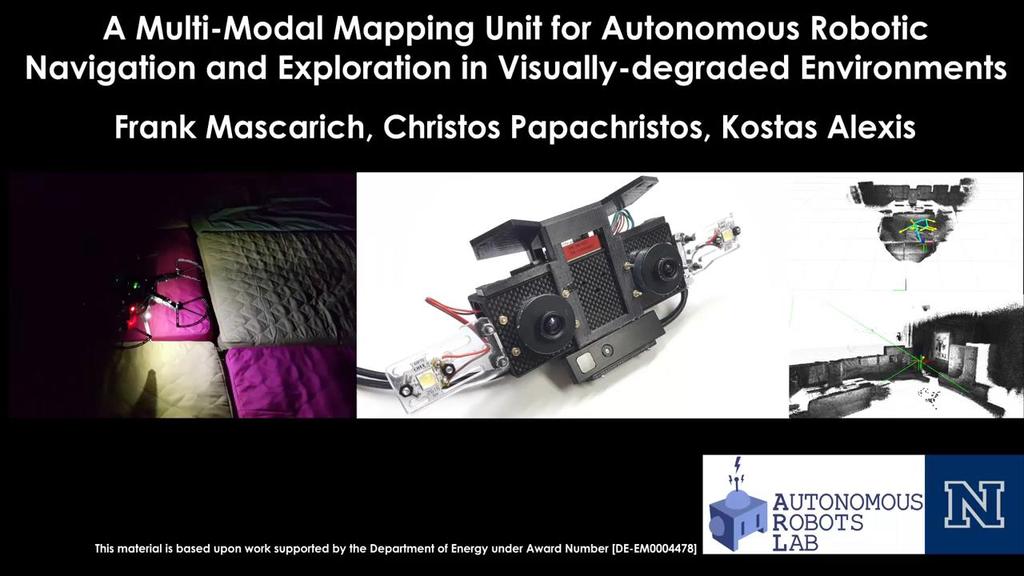
7 Autonomous Aerial Robots: an example The Problem: An aerial robot is requested to enter an unknown environment, explore and 3D map it, detect radiation in it and provide the end result to the user. The environment is visually-degraded and geometrically complex.

8 Autonomous Aerial Robots: an example The Problem: An aerial robot is requested to enter an unknown environment, explore and 3D map it, detect radiation in it and provide the end result to the user. The environment is visually-degraded and geometrically complex. A combined perception, planning and control problem.
9 Perception Planning Control

![Robust Multi-Modal Localization And Mapping Accurate data association [camera-to-camera, camera-to-lidar] Robust state estimation of the robot pose and](/docs-images/77/75756604/images/10-2.jpg "the map of the environment Multi-modal sensor fusion that tracks the information matrix of the system allows reliable operation in visuallydegraded")
10 Multi-Modal Localization And Mapping Multi-Modal Sensor Fusion for GPS-denied operation in Degraded Visual Environments Camera systems LiDAR/ToF 3D Cameras Inertial sensors System Optimization Hardware synchronization for reliable sensor data association Sensor intrinsics and extrinsics calibration Robust Multi-Modal Localization And Mapping Accurate data association [camera-to-camera, camera-to-lidar] Robust state estimation of the robot pose and the map of the environment Multi-modal sensor fusion that tracks the information matrix of the system allows reliable operation in visuallydegraded environments.
11 Exploration and Mapping Path Planning Overall problem: The overall problem is that of exploring an unknown bounded 3D volume V E R 3, while aiming to minimize the localization and mapping uncertainty as evaluated through a metric over the robot pose and landmarks probabilistic belief. Problem 1: Volumetric Exploration Given a bounded volume V E, find a collision free path σ starting at an initial configuration ξ init Ξthat leads to E identifying the free and occupied parts V free and V E occ when being executed, such that there does not exist any collision free configuration from which any piece of V E E {V free, V E occ } could be perceived. Problem 2: Localizability-aware Planning Given a V M V E, find a collision free path σ M starting at an initial configuration ξ 0 Ξ and ending in a configuration ξ final Ξ that aims to improve the robot s localization and mapping confidence by following paths of optimized expected robot pose and tracked landmarks covariance.

 Two-levels Path")
12 Exploration and Mapping Path Planning Receding Horizon Exploration and Mapping Planner (rhemplanner) Two-levels Path Planning paradigm

13 Exploration step



14 Exploration step Exploration Gain with probabilistic re-observation Aiming to maximize newly explored space and re-observe space with decreased confidence of being mapped as occupied.
15 Uncertainty-aware step

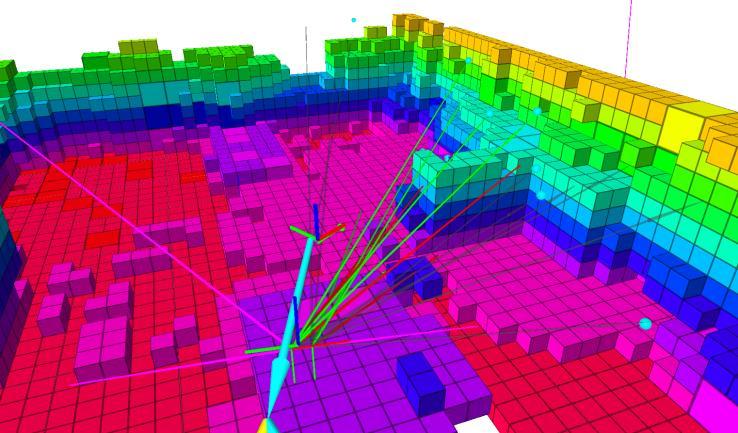
16 Uncertainty-aware step The robot performs onboard localization and mapping For the case of our experiments it performs visual-inertial localization The assumptions are: Pose, features and their uncertainties are estimated Dense, volumetric mapping takes place To get an estimate about its pose, it relies on tracking landmarks from its sensor systems. The system performs odometry in an EKF-fashion and the overall state of the filter is:

17 Uncertainty-aware step Belief Propagation: in order to identify the paths that minimize the robot uncertainty, a mechanism to propagate the robot belief about its pose and the tracked features has to be established. Using Michael Bloesch, Sammy Omari, Marco Hutter, Roland Siegwart, ROVIO: Robust Visual Inertial Odometry Using a Direct EKF-Based Approach, IROS 2015


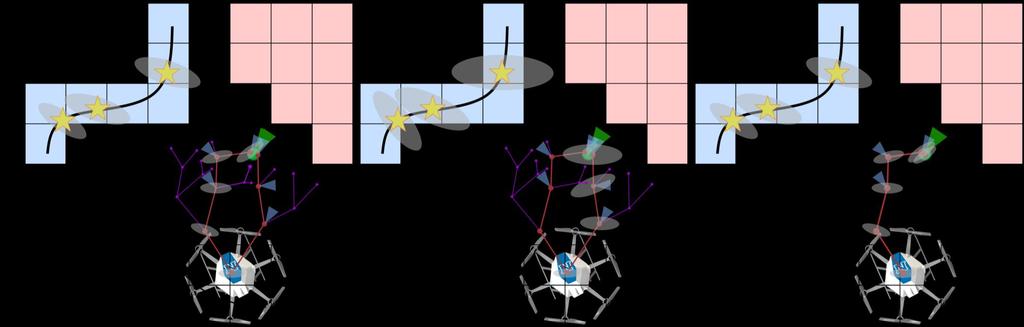
18 Uncertainty-aware step Uncertainty optimization: to be able to derive which path minimizes the robot uncertainty about its pose and the tracked landmarks, a metric of how small the covariance ellipsoid is has to be defined. What metric?
19 Uncertainty-aware step Uncertainty optimization: to be able to derive which path minimizes the robot uncertainty about its pose and the tracked landmarks, a metric of how small the covariance ellipsoid is has to be defined. D-optimality metric: Broadly: maximize the determinant of the information matrix X'X of the design. This criterion results in maximizing the differential Shannon information content of the parameter estimates.
20 Exploration and Mapping Path Planning ξ 0 current vehicle configuration Initialize T E with ξ 0 First Planning Step E g best 0 // Set best exploration gain to zero n best n 0 ξ 0 // Set best exploration node to root N T E Number of nodes in T E While N E E T < N max E or g best == 0 do Incrementally build T E E by adding n new E ξ new N T E N T E + 1 E if ExplorationGain n new E > g best then E n new E g best E n new E ExplorationGain n new if N E E T > N TOT then Terminate planning E, n E RH, ξ RH ExtractBestPathSegment n best σ RH S ξrh LocalSet(ξ RH )
21 Exploration and Mapping Path Planning Propagate robot belief along σ RH a 1 // number of admissible paths g M a BeliefGain(σ E RH ) g M M best g a // straight path belief gain σ M best M σ RH while N M T < N M max or V T M = S ξrh do Incrementally build T M M by adding n new E ξ new Propagate robot belief from current to planned vertex if ξ new S ξrh then Second Planning Step Add new vertex n M new at ξ RH and connect a a + 1 σ M α ExtractBranch(n M new ) g α M BeliefGain(σ a M ) if g M α < g M best then return σ M σ M σ a M g M best g a M
 representing the vehicle dynamics, a sufficiently accurate model is derived.")

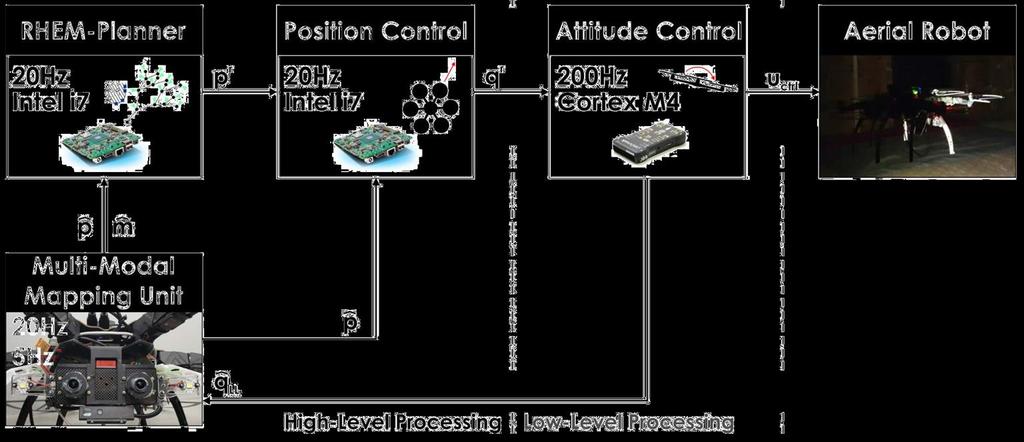
22 ሶ Flight Control System Model-based approach System identification By identifying the parameters of a nonlinear differential equation x = f(x, u) representing the vehicle dynamics, a sufficiently accurate model is derived. Cascaded Flight Control: Model Predictive Control strategies are employed for the position control of the vehicle Saturated fixed-gain loops ensure fast and accurate tracking of the attitude references Why MPC? Robustly accurate response Respects system constraints
23 Uncertainty-aware Exploration & Mapping Kostas Alexis, Autonomous Robots Lab,
24

25 Multiple Aerial Robotic Configurations Different aerial robot configurations are designed to address the specific challenges of different applications and environments. Our lab develops multirotor and fixed-wing vehicles while carries experiences from Solar-powered UAV design and convertible systems (work at ETH Zurich)


26 Robots on the Ground Planned robotic research aims to address challenges related to autonomous transportation systems and legged robotic autonomy. Extension of our closed Perception-Planning-Control research approach Ghost Minitaur (ordered)

27 New Initiative: Intelligent Mobility Driverless cars are indicative examples of how robots can become ubiquitous. But for such robots to be able and be trusted to operate autonomously in our cities, the challenges in perception, planning, control and multi-robot collaboration have to be robustly addressed. The Intelligent Mobility project is a university initiative that reaches to multiple collaborations locally, nationally and internationally. Specifics: Goal: Enhance the safety and systematicity of public transportation systems through autonomous technologies. Pave the way towards autonomous public transportation. Testing: Sierra Spirit Route of the RTC (vehicle performing its normal operation)


28 Marine Robotics Maritime robotics have an exciting set of possible applications. Among others related to the protection of our water ecosystems. In collaboration with the department of biology we investigate the development of a robotic boat that performs automated algae detection and mapping for Lake Tahoe. Combined perception system: Above water: Large baseline stereo, IMU, GPS Underwater: Camera and illumination system to detect algae based on its specific spectrum response.

29 Marine Robotics Maritime robotics have an exciting set of possible applications, among others related to the protection of our water ecosystems. In collaboration with the department of biology we investigate the development of a robotic boat that performs automated algae detection and mapping for Lake Tahoe. Combined perception system: Above water: Large baseline stereo, IMU, GPS Underwater: Camera and illumination system to detect algae based on its specific spectrum response.



30 Robots in the Wild Experiments in the laboratory is how robotic technology gets verified and improved. But the natural environment of robots is out in the wild. One of the most fundamental directions of our work is related to field evaluation. Field robotics research is the key for systems to be optimized and for the society to see the benefits and abilities of robotics technology.
31


32 Multi-modal characterization of Nuclear Sites Combined roving and flying robots to characterize DOE-EM facilities. Identification and semantic classification of tanks, pipes, and other important structures to intelligently focus the robot exploration and inspection tasks. Radiation, chemical, and heat spatial maps are fused with 3D models of the environment Integrated planning and multi-modal perception for comprehensive mapping of nuclear facilities. Augmented exploration-planning to account for the radiation, chemical, and heat estimates. Coordination of aerial and ground robots to maximize the capabilities of both platforms. Demonstration in DOE-EM relevant, nuclear analog facilities towards advanced technology readiness. Course curriculum development and K-16 outreach. Collaboration with nuclear engineering pioneers (Taylor Wilson)


33 Educational Activities

34 Educational Activities CS491/691: Introduction to Aerial Robotics Aerial robot dynamics State estimation Flight control Motion planning Partially project-based CS491/691: Autonomous Mobile Robot Design Robot dynamics & Kinematics State estimation Simultaneous Localization and Mapping Robot ontrol Path planning Fully project-based Robotics Short Seminar series Topic-specific talks with invited colleagues from the UNR, other academic institutions or the industry. ENGR471: Flight Coordinator Course Education on the operational aspects of Unmanned Aerial Vehicles. Introduction to basic aerodynamics, communication systems and more. In collaboration with Insitu Outreach Supporting the UNR UAS summer campus Robot projects for school students and community colleges Online examples and videos

35



36 The Autonomous Robots Arena 10 Vicon Vantage V8 Motion Capture System cameras and the Tracker Software. 15x7x5m theoretical motion-capture enabled volume. Sub-mm and Sub-degree accuracy. 14x6.5x4m actual robust operation for 2+ more tracking and gap within the volume. A main computer running the official software. A powerful computer running ROS to support easy robot integration. Mock-ups installed inside for challenging experiments (more than 300boxes to create different geometric forms. Three separate networking options. Visual-light cameras also and synchronized


37 Open Source contributions Open Source Code: Structural Inspection Planner: Next-Best-View Planner: Receding Horizon Exploration and Mapping Planner: Robust Model Predictive Control Dubins Airplane Solver Motion Analysis Cortex ROS Bridge
38 The team Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate Researchers From summer 2017: 1 more Senior Postdoctoral Researcher and 1 more PhD Candidate
39 Thank you! Please ask your question!
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Ground and Aerial Robots for Challenging Environments
 Shaping the future Ground and Aerial Robots for Challenging Environments Roland Siegwart, & Wyss Zurich www.asl.ethz.ch & www.wysszurich.ch Qualcomm Augmented Reality Lecture Series Vienna, April 21, 2016
Shaping the future Ground and Aerial Robots for Challenging Environments Roland Siegwart, & Wyss Zurich www.asl.ethz.ch & www.wysszurich.ch Qualcomm Augmented Reality Lecture Series Vienna, April 21, 2016
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Content. Robotik: Möglichkeiten, Trends und Visionen. Introduction. Robotics the challenges and technology drivers. Robot Examples
 Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Localisation et navigation de robots
 Localisation et navigation de robots UPJV, Département EEA M2 EEAII, parcours ViRob Année Universitaire 2017/2018 Fabio MORBIDI Laboratoire MIS Équipe Perception ique E-mail: fabio.morbidi@u-picardie.fr
Localisation et navigation de robots UPJV, Département EEA M2 EEAII, parcours ViRob Année Universitaire 2017/2018 Fabio MORBIDI Laboratoire MIS Équipe Perception ique E-mail: fabio.morbidi@u-picardie.fr
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Distributed Robotics From Science to Systems
 Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
KALMAN FILTER APPLICATIONS
 ECE555: Applied Kalman Filtering 1 1 KALMAN FILTER APPLICATIONS 1.1: Examples of Kalman filters To wrap up the course, we look at several of the applications introduced in notes chapter 1, but in more
ECE555: Applied Kalman Filtering 1 1 KALMAN FILTER APPLICATIONS 1.1: Examples of Kalman filters To wrap up the course, we look at several of the applications introduced in notes chapter 1, but in more
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
WE SPECIALIZE IN MILITARY PNT Research Education Engineering
 Defense-Focused Autonomy & Navigation Anywhere, Anytime, Using Anything WE SPECIALIZE IN MILITARY PNT Research Education Engineering RESEARCH THRUST 1 RESEARCH THRUST 2 RESEARCH THRUST 3 Autonomous & Cooperative
Defense-Focused Autonomy & Navigation Anywhere, Anytime, Using Anything WE SPECIALIZE IN MILITARY PNT Research Education Engineering RESEARCH THRUST 1 RESEARCH THRUST 2 RESEARCH THRUST 3 Autonomous & Cooperative
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Event-based Algorithms for Robust and High-speed Robotics
 Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt.
 Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
LABEX MS2T Management of Technological Systems of Systems
 LABEX MS2T Management of Technological Systems of Systems Thierry Denœux Université de Technologie de Compiègne HEUDIASYC, UMR CNRS 7253 https://www.hds.utc.fr/ tdenoeux SoSE 2018 workshop Paris, June
LABEX MS2T Management of Technological Systems of Systems Thierry Denœux Université de Technologie de Compiègne HEUDIASYC, UMR CNRS 7253 https://www.hds.utc.fr/ tdenoeux SoSE 2018 workshop Paris, June
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles. Dr. Nick Krouglicof 14 June 2012
 Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493
 Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493 ABSTRACT Nathan Michael *, William Whittaker *, Martial Hebert * * Carnegie Mellon University
Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493 ABSTRACT Nathan Michael *, William Whittaker *, Martial Hebert * * Carnegie Mellon University
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
On January 14, 2004, the President announced a new space exploration vision for NASA
 Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Wide-area Motion Imagery for Multi-INT Situational Awareness
 Wide-area Motion Imagery for Multi-INT Situational Awareness Bernard V. Brower Jason Baker Brian Wenink Harris Corporation TABLE OF CONTENTS ABSTRACT... 3 INTRODUCTION WAMI HISTORY... 4 WAMI Capabilities
Wide-area Motion Imagery for Multi-INT Situational Awareness Bernard V. Brower Jason Baker Brian Wenink Harris Corporation TABLE OF CONTENTS ABSTRACT... 3 INTRODUCTION WAMI HISTORY... 4 WAMI Capabilities
Flight Control Laboratory
 Dept. of Aerospace Engineering Flight Dynamics and Control System Course Flight Control Laboratory Professor: Yoshimasa Ochi Associate Professor: Nobuhiro Yokoyama Flight Control Laboratory conducts researches
Dept. of Aerospace Engineering Flight Dynamics and Control System Course Flight Control Laboratory Professor: Yoshimasa Ochi Associate Professor: Nobuhiro Yokoyama Flight Control Laboratory conducts researches
Ubiquitous Positioning: A Pipe Dream or Reality?
 Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime and Port Authority of Singapore
 Fujitsu Limited Agency for Science, Technology and Research (A*STAR) Singapore Management University April 16, 2018 Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime
Fujitsu Limited Agency for Science, Technology and Research (A*STAR) Singapore Management University April 16, 2018 Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad. Federal Aviation. Administration.
 Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Applied Robotics for Installations and Base Operations (ARIBO)
") Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
Surveillance strategies for autonomous mobile robots. Nicola Basilico Department of Computer Science University of Milan
 Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE)
 Capability Assessment Event (CAE)") Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE) Overview 08-09 May 2019 Submit NLT 22 March On 08-09 May, SOFWERX, in collaboration with United States Special Operations
Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE) Overview 08-09 May 2019 Submit NLT 22 March On 08-09 May, SOFWERX, in collaboration with United States Special Operations
Up, Up, and Away!! Marine Robotics and Remote Duke University Marine Laboratory. David W. Johnston
 Up, Up, and Away!! Marine Robotics and Remote Sensing @ Duke University Marine Laboratory David W. Johnston Assistant Professor of the Practice of Marine Conservation & Ecology! Division of Marine Science
Up, Up, and Away!! Marine Robotics and Remote Sensing @ Duke University Marine Laboratory David W. Johnston Assistant Professor of the Practice of Marine Conservation & Ecology! Division of Marine Science
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
Séminaire Voiture Autonome: Technologies, Enjeux et Applications February , Paris (France) Asprom UIMM Cap Tronic
 Asprom UIMM Cap Tronic") Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Challenges for AI: Mobile Robots on Construction Sites. Tim Detert
 Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Next Generation Vehicle Positioning Techniques for GPS- Degraded Environments to Support Vehicle Safety and Automation Systems
 Next Generation Vehicle Positioning Techniques for GPS- Degraded Environments to Support Vehicle Safety and Automation Systems EXPLORATORY ADVANCED RESEARCH PROGRAM Auburn University SRI (formerly Sarnoff)
Next Generation Vehicle Positioning Techniques for GPS- Degraded Environments to Support Vehicle Safety and Automation Systems EXPLORATORY ADVANCED RESEARCH PROGRAM Auburn University SRI (formerly Sarnoff)
Requirements Specification Minesweeper
 Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Cross Linking Research and Education and Entrepreneurship
 Cross Linking Research and Education and Entrepreneurship MATLAB ACADEMIC CONFERENCE 2016 Ken Dunstan Education Manager, Asia Pacific MathWorks @techcomputing 1 Innovation A pressing challenge Exceptional
Cross Linking Research and Education and Entrepreneurship MATLAB ACADEMIC CONFERENCE 2016 Ken Dunstan Education Manager, Asia Pacific MathWorks @techcomputing 1 Innovation A pressing challenge Exceptional
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Summary of robot visual servo system
 Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Autonomous UAV support for rescue forces using Onboard Pattern Recognition
 Autonomous UAV support for rescue forces using Onboard Pattern Recognition Chen-Ko Sung a, *, Florian Segor b a Fraunhofer IOSB, Fraunhoferstr. 1, Karlsruhe, Country E-mail address: chen-ko.sung@iosb.fraunhofer.de
Autonomous UAV support for rescue forces using Onboard Pattern Recognition Chen-Ko Sung a, *, Florian Segor b a Fraunhofer IOSB, Fraunhoferstr. 1, Karlsruhe, Country E-mail address: chen-ko.sung@iosb.fraunhofer.de
Checkerboard Tracker for Camera Calibration. Andrew DeKelaita EE368
 Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied Environments
 DLR.de Chart 1 International Technical Symposium on Navigation and Timing (ITSNT) Toulouse, France, 2017 Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied
DLR.de Chart 1 International Technical Symposium on Navigation and Timing (ITSNT) Toulouse, France, 2017 Towards Autonomous Planetary Exploration Collaborative Multi-Robot Localization and Mapping in GPS-denied
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
A Practical Approach to Understanding Robot Consciousness
 A Practical Approach to Understanding Robot Consciousness Kristin E. Schaefer 1, Troy Kelley 1, Sean McGhee 1, & Lyle Long 2 1 US Army Research Laboratory 2 The Pennsylvania State University Designing
A Practical Approach to Understanding Robot Consciousness Kristin E. Schaefer 1, Troy Kelley 1, Sean McGhee 1, & Lyle Long 2 1 US Army Research Laboratory 2 The Pennsylvania State University Designing
A Review of Vulnerabilities of ADS-B
 A Review of Vulnerabilities of ADS-B S. Sudha Rani 1, R. Hemalatha 2 Post Graduate Student, Dept. of ECE, Osmania University, 1 Asst. Professor, Dept. of ECE, Osmania University 2 Email: ssrani.me.ou@gmail.com
A Review of Vulnerabilities of ADS-B S. Sudha Rani 1, R. Hemalatha 2 Post Graduate Student, Dept. of ECE, Osmania University, 1 Asst. Professor, Dept. of ECE, Osmania University 2 Email: ssrani.me.ou@gmail.com
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Decentralised SLAM with Low-Bandwidth Communication for Teams of Vehicles
 Decentralised SLAM with Low-Bandwidth Communication for Teams of Vehicles Eric Nettleton a, Sebastian Thrun b, Hugh Durrant-Whyte a and Salah Sukkarieh a a Australian Centre for Field Robotics, University
Decentralised SLAM with Low-Bandwidth Communication for Teams of Vehicles Eric Nettleton a, Sebastian Thrun b, Hugh Durrant-Whyte a and Salah Sukkarieh a a Australian Centre for Field Robotics, University
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
COURSE 2. Mechanical Engineering at MIT
 COURSE 2 Mechanical Engineering at MIT The Department of Mechanical Engineering MechE embodies the Massachusetts Institute of Technology s motto mens et manus, mind and hand as well as heart by combining
COURSE 2 Mechanical Engineering at MIT The Department of Mechanical Engineering MechE embodies the Massachusetts Institute of Technology s motto mens et manus, mind and hand as well as heart by combining
Introduction To Cognitive Robots
 Introduction To Cognitive Robots Prof. Brian Williams Rm 33-418 Wednesday, February 2 nd, 2004 Outline Examples of Robots as Explorers Course Objectives Student Introductions and Goals Introduction to
Introduction To Cognitive Robots Prof. Brian Williams Rm 33-418 Wednesday, February 2 nd, 2004 Outline Examples of Robots as Explorers Course Objectives Student Introductions and Goals Introduction to
High Precision 6DOF Vehicle Navigation in Urban Environments using a Low-cost Single-frequency GPS Receiver
 High Precision 6DOF Vehicle Navigation in Urban Environments using a Low-cost Single-frequency GPS Receiver Sheng Zhao Yiming Chen Jay A. Farrell Abstract Many advanced driver assistance systems (ADAS)
High Precision 6DOF Vehicle Navigation in Urban Environments using a Low-cost Single-frequency GPS Receiver Sheng Zhao Yiming Chen Jay A. Farrell Abstract Many advanced driver assistance systems (ADAS)
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics: