ENSTA Bretagne Robotics Topic Group
|
|
|
- Linette Waters
- 5 years ago
- Views:
Transcription




1 ENSTA Bretagne Robotics Topic Group







2 General presentation The Robotics Topic Group of STIC Department at ENSTA Bretagne works mainly on problems found in mobile robotics for marine, submarine, ground, aerial, multi-domain, single or grouped robots 03/03/2018-2


3 General presentation This application domain enables to validate experimentally various concepts and algorithms, using academic tools such as set-membership methods, especially interval analysis 03/03/2018-3


4 General presentation There are various related topics : building simple, cheap and robust robots, remote control, planification, autonomy, control, validation, robust localization, SLAM (Simultaneous Localization And Mapping), objects detection and identification, cartography, collaboration between heterogeneous robots, artificial intelligence, reliability 03/03/2018-4


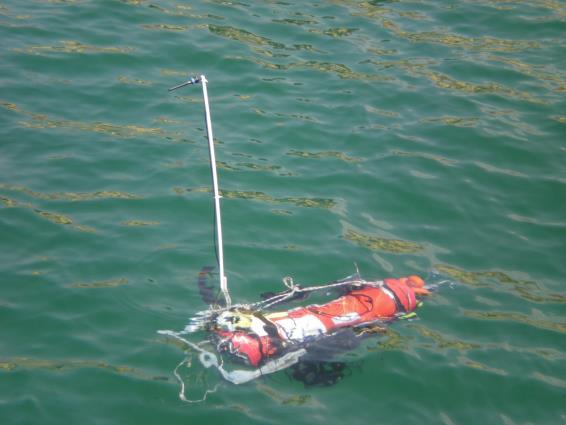
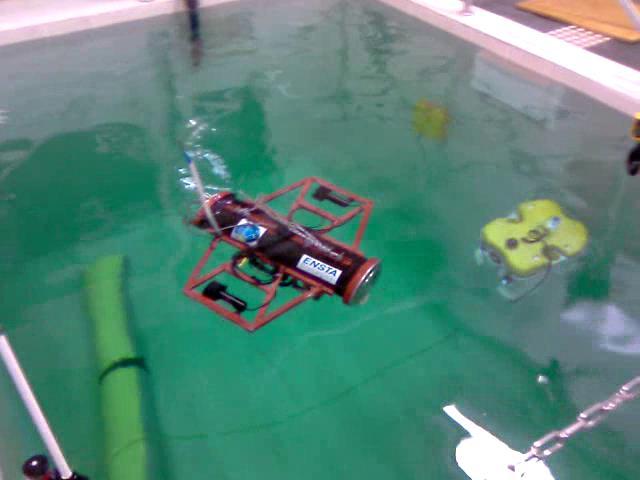
5 Research Examples of past projects/achievements : Localization of a submarine robot using interval analysis VAIMOS autonomous sailboat (collaboration with Ifremer) 03/03/2018-5


6 Research Examples of past projects/achievements : COMET : guaranteed estimation of the explored area by an AUV (Autonomous Underwater Vehicle) Going around an island using an AUV 03/03/2018-6
7 Research Examples of current projects : DGA/MRIS project about reliable complex robotic systems, in collaboration with Ecole Polytechnique and ENSTA ParisTech DGA RAPID CHIMAERA : building a submarine robot equipped with a laser-based obstacle system, in collaboration with Thales and other companies ANR CONTREDO, about interval analysis applied to dynamic systems, in collaboration with LIRMM, IMTA and MBDA 03/03/2018-7





8 P Teaching and robotics club In parallel to its academic research activities and industrial research projects, the Robotics Topic Group tries to develop teaching in mobile robotics to train robotics engineers directly operational in industrial fields, from start-ups to well-established multinational companies 03/03/2018-8



9 Teaching and robotics club For that purpose, teaching covers theoretical domains E.g. robots localization using probabilistic or set-membership methods, decision, control, SLAM, path planning, inverse kinematics... 03/03/2018-9



10 Teaching and robotics club as well as practical domains DART ground and NAO humanoids robots Design and building of prototypes Middleware and CAD Field experiments at Guerlédan lake 03/03/
11 Teaching and robotics club As examples, the following student projects gather researchers, teachers, Ph.D students, postdocs and engineers from the Robotics Topic Group around research and development topics often proposed by partner companies or universities, in collaboration with the school robotics club ( : Hydro-Rob Guerlédan project ( Cordelière project ( SHEPHERD project ( SAUC-E ( WRSC ( eurathlon ( ERL Emergency ( international robotics competitions 03/03/






12 Teaching and robotics club Hydro-Rob Guerlédan project : students projects at Guerlédan lake, some of them proposed by companies, with also a participation of other students groups from Ecole Polytechnique and UPMC, companies robots demonstrations, etc. 03/03/



13 Teaching and robotics club eurathlon/erl competitions : collaboration between heterogeneous robots to explore areas that would be too dangerous for humans 03/03/


14 Devices recently bought to help for the creation of groups of drones Acoustic underwater imaging sensors (BlueView sonars) CNC machine, to be able to build specific robot parts 03/03/

 Nortek DVL 1 MHz TRDI Pathfinder")
15 Devices recently bought to help for the creation of groups of drones Acoustic sensors for speed measurements underwater (DVL) Nortek DVL 1 MHz TRDI Pathfinder 03/03/



16 03/03/




17 The end 03/03/
Muse Mobility, Ubiquity, Security
 Muse Mobility, Ubiquity, Security serge.chaumette@labri.fr Goals and research topics of the Muse research group at LaBRI Contribute to the definition and development of supporting middleware, tools and
Muse Mobility, Ubiquity, Security serge.chaumette@labri.fr Goals and research topics of the Muse research group at LaBRI Contribute to the definition and development of supporting middleware, tools and
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
INESCTEC Marine Robotics Experience
 From Knowledge Generation To Science-based Innovation INESCTEC Marine Robotics Experience Aníbal Matos Robotics@ INESC TEC Universidade do Porto SEAS-ERA Workshop, Lisboa Sep 17-18, 2013 Research and Technological
From Knowledge Generation To Science-based Innovation INESCTEC Marine Robotics Experience Aníbal Matos Robotics@ INESC TEC Universidade do Porto SEAS-ERA Workshop, Lisboa Sep 17-18, 2013 Research and Technological
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Dr. Ayşegül Uçar. Department of Mechatronics Engineering University of Firat, Elazig, Turkey.
 Dr. Aysegul UCAR Dr. Ayşegül Uçar Department of Mechatronics Engineering University of Firat, Elazig, Turkey agulucar@firat.edu.tr https://abs.firat.edu.tr/agulucar 2 My Country-Turkey 3 My University
Dr. Aysegul UCAR Dr. Ayşegül Uçar Department of Mechatronics Engineering University of Firat, Elazig, Turkey agulucar@firat.edu.tr https://abs.firat.edu.tr/agulucar 2 My Country-Turkey 3 My University
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ISR-PORTO. Instituto de Sistemas e Robótica- Porto. A Research Unit of the Faculty of Engineering, University of Porto
 Instituto de Sistemas e Robótica- Porto A Research Unit of the Faculty of Engineering, University of Porto http://www.fe.up.pt/isrp/ isrp@fe.up.pt ISR-P Robotic Systems Group Objectives Development of
Instituto de Sistemas e Robótica- Porto A Research Unit of the Faculty of Engineering, University of Porto http://www.fe.up.pt/isrp/ isrp@fe.up.pt ISR-P Robotic Systems Group Objectives Development of
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Software Architecture for an Exploration Robot based on Urbi
 Software Architecture for an Exploration Robot based on Urbi David Filliat Akim Demaille Jean-Christophe Baillie Guillaume Duceux David Filliat Quentin Hocquet Matthieu Nottale Ensta-ParisTech, Gostai
Software Architecture for an Exploration Robot based on Urbi David Filliat Akim Demaille Jean-Christophe Baillie Guillaume Duceux David Filliat Quentin Hocquet Matthieu Nottale Ensta-ParisTech, Gostai
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Gabriele Ferri 1, Fausto Ferreira 1 and Vladimir Djapic 2
 Boosting the Talent of New Generations of Marine Engineers Through Robotics Competitions in Realistic Environments: the SAUC-E and EuRathlon Experience Gabriele Ferri 1, Fausto Ferreira 1 and Vladimir
Boosting the Talent of New Generations of Marine Engineers Through Robotics Competitions in Realistic Environments: the SAUC-E and EuRathlon Experience Gabriele Ferri 1, Fausto Ferreira 1 and Vladimir
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
EIS - Electronics Instrumentation Systems for Marine Applications
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
A Course on Marine Robotic Systems: Theory to Practice. Full Programme
 A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
Distributed Robotics From Science to Systems
 Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Subsea Monitoring & Mapping
 Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
TORSTEIN PEDERSEN. Improving the Common DVL: A New Standard in Doppler Velocity Logs
 TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules.
 Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Instituto Nacional de Ciência e Tecnologia em Sistemas Embarcados Críticos
 Instituto Nacional de Ciência e Tecnologia em Sistemas Embarcados Críticos INCT-SEC José Carlos Maldonado ICMC/USP LRM Laboratóriode Robótica Móvel Principais Projetos: GT1, GT2 e GT3 GT 1 - Robôs Táticos
Instituto Nacional de Ciência e Tecnologia em Sistemas Embarcados Críticos INCT-SEC José Carlos Maldonado ICMC/USP LRM Laboratóriode Robótica Móvel Principais Projetos: GT1, GT2 e GT3 GT 1 - Robôs Táticos
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
SAUC-E 2010 Journal Paper ENSIETA
 SAUC-E 2010 Journal Paper ENSIETA Fabrice LE BARS, Jan SLIWKA, Luc JAULIN et al. SAUC-E 2010 Journal Paper ENSIETA 2 CONTENT I. EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION...
SAUC-E 2010 Journal Paper ENSIETA Fabrice LE BARS, Jan SLIWKA, Luc JAULIN et al. SAUC-E 2010 Journal Paper ENSIETA 2 CONTENT I. EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION...
OFFensive Swarm-Enabled Tactics (OFFSET)
") OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION...
 SAUC ISSE and SARDINE, 2 AUVs for SAUC-E 2011 2 CONTENT I. EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION... 5 EXTERNAL ARCHITECTURE:... 5 INTERNAL ARCHITECTURE:... 7 ELECTRONIC
SAUC ISSE and SARDINE, 2 AUVs for SAUC-E 2011 2 CONTENT I. EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION... 5 EXTERNAL ARCHITECTURE:... 5 INTERNAL ARCHITECTURE:... 7 ELECTRONIC
MarineSIM : Robot Simulation for Marine Environments
 MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
II. ROBOT SYSTEMS ENGINEERING
 Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
Mobile Robots: Successes and Challenges in Artificial Intelligence Jitendra Joshi (Research Scholar), Keshav Dev Gupta (Assistant Professor), Nidhi Sharma (Assistant Professor), Kinnari Jangid (Assistant
FP7 STREP. The. Consortium. Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
 FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Winter School on Intervention Autonomous Underwater Vehicles
 Winter School on Intervention Autonomous Underwater Vehicles University of Girona, Spain 6 to 10th November 2017 2 /14 WELCOME Dear all participants, welcome to the first STRONG MAR winter school. The
Winter School on Intervention Autonomous Underwater Vehicles University of Girona, Spain 6 to 10th November 2017 2 /14 WELCOME Dear all participants, welcome to the first STRONG MAR winter school. The
Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard
 Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard Cooperative ASV/AUV Navigation AUV Navigation is not error bounded: Even with a $300k RLG, error will accumulate GPS and Radio
Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard Cooperative ASV/AUV Navigation AUV Navigation is not error bounded: Even with a $300k RLG, error will accumulate GPS and Radio
UNR 6285 Deep Underwater Compatible Wi-Fi Antenna Development Hector Fabian Guarnizo Mendez,
 Deep Underwater Compatible Wi-Fi Antenna Development Hector Fabian Guarnizo Mendez, Lab-STICC/MOM, IFREMER Christian GAC, Geoscience Marines dpt., IFREMER Contact : Christian.GAC@ifremer.fr François LE
Deep Underwater Compatible Wi-Fi Antenna Development Hector Fabian Guarnizo Mendez, Lab-STICC/MOM, IFREMER Christian GAC, Geoscience Marines dpt., IFREMER Contact : Christian.GAC@ifremer.fr François LE
KPI is one of the oldest and biggest technical universities in Ukraine. It was founded in 1898.
 National Technical University of Ukraine Kyiv Polytechnic Institute KPI is one of the oldest and biggest technical universities in Ukraine. It was founded in 1898. OVERVIEW 39 bachelor s, 92 master s,
National Technical University of Ukraine Kyiv Polytechnic Institute KPI is one of the oldest and biggest technical universities in Ukraine. It was founded in 1898. OVERVIEW 39 bachelor s, 92 master s,
Progress Report. Mohammadtaghi G. Poshtmashhadi. Supervisor: Professor António M. Pascoal
 Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
European Robotics League Emergency Robots: a multi-domain outdoor robotics challenge
 European Robotics League Emergency Robots: a multi-domain outdoor robotics challenge Gabriele Ferri, Fausto Ferreira NATO Centre for Maritime Research and Experimentation (CMRE) Viale San Bartolomeo 400,
European Robotics League Emergency Robots: a multi-domain outdoor robotics challenge Gabriele Ferri, Fausto Ferreira NATO Centre for Maritime Research and Experimentation (CMRE) Viale San Bartolomeo 400,
Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities
 Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities Wei Qiu, Memorial University Andrew Gerber, University of New Brunswick Jason Gu,
Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities Wei Qiu, Memorial University Andrew Gerber, University of New Brunswick Jason Gu,
MIT Unmanned Marine Vehicle Autonomy, Sensing and Communications Spring 2015
 MIT 2.680 Unmanned Marine Vehicle Autonomy, Sensing and Communications Spring 2015 Lectures: Labs: Lab Material: Stellar site: Class Website: Instructors: Office Hours: Contact Info: M-W 3-4pm, NE45-202
MIT 2.680 Unmanned Marine Vehicle Autonomy, Sensing and Communications Spring 2015 Lectures: Labs: Lab Material: Stellar site: Class Website: Instructors: Office Hours: Contact Info: M-W 3-4pm, NE45-202
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Robotics Projects at NAIT. David Carpenter PhD.
 Robotics Projects at NAIT David Carpenter PhD. Introduction and background NAIT- Largest Polytechnic in Western Canada As a Polytechnic: Programs include degree, diploma, certificates and apprenticeship
Robotics Projects at NAIT David Carpenter PhD. Introduction and background NAIT- Largest Polytechnic in Western Canada As a Polytechnic: Programs include degree, diploma, certificates and apprenticeship
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Undersea Communications
 Smart Super Vehicles Undersea Communications This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract No. FA8721-05-C-0002
Smart Super Vehicles Undersea Communications This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract No. FA8721-05-C-0002
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering. David Brookes Senior Advisor, Upstream Engineering, BP
 Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Teamwork among marine robots advances and challenges
 Teamwork among marine robots advances and challenges Mandar Chitre ARL, Tropical Marine Science Institute and Department of Electrical & Computer Engineering, National University of Singapore. Abstract.
Teamwork among marine robots advances and challenges Mandar Chitre ARL, Tropical Marine Science Institute and Department of Electrical & Computer Engineering, National University of Singapore. Abstract.
The Real-Time Control System for Servomechanisms
 The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
PROJECTS 2017/18 AUTONOMOUS SYSTEMS. Instituto Superior Técnico. Departamento de Engenharia Electrotécnica e de Computadores September 2017
 AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Smart and Networking Underwater Robots in Cooperation Meshes
 Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #2 January 2017 SWARMs Early Trials The first stage of field trials and demonstrations planned in the SWARMs project was held
Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #2 January 2017 SWARMs Early Trials The first stage of field trials and demonstrations planned in the SWARMs project was held
- 9_12TI7973-QUIZ2 - Print Test
 Page 1 of 12 Report: Test Answer Key District: Madison Test: Description: Unit B EDP Form: 501 1. Stereolithography, selective laser sintering, ballistic particle manufacturing, and laminated object manufacturing
Page 1 of 12 Report: Test Answer Key District: Madison Test: Description: Unit B EDP Form: 501 1. Stereolithography, selective laser sintering, ballistic particle manufacturing, and laminated object manufacturing
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
Manuela Toro High School Enterprise Progress Report
 Manuela Toro High School Enterprise Progress Report The team The team began activities in August of 2010 and it is made up by 19 students from of Manuela Toro Morice and Jose Collazos high schools (HS)
Manuela Toro High School Enterprise Progress Report The team The team began activities in August of 2010 and it is made up by 19 students from of Manuela Toro Morice and Jose Collazos high schools (HS)
Global Opportunities. Japan. Subsea Expo
 Global Opportunities Japan Subsea Expo 2017 Scottish Enterprise Scottish Development International What we offer Guidance on the best routes to international markets Access to international market opportunities
Global Opportunities Japan Subsea Expo 2017 Scottish Enterprise Scottish Development International What we offer Guidance on the best routes to international markets Access to international market opportunities
Dr. Charles Watt. Educational Advancement & Innovation
 Dr. Charles Watt Educational Advancement & Innovation 1 21st Century Education What are the critical skills our undergraduate students need? Technical depth in a particular field Creativity and innovation
Dr. Charles Watt Educational Advancement & Innovation 1 21st Century Education What are the critical skills our undergraduate students need? Technical depth in a particular field Creativity and innovation
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Newsletter. Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2)
") www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea. Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Tools 2 MOOS Mission Oriented Operating Suite 3 MOOS
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Tools 2 MOOS Mission Oriented Operating Suite 3 MOOS
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
COURSE 2. Mechanical Engineering at MIT
 COURSE 2 Mechanical Engineering at MIT The Department of Mechanical Engineering MechE embodies the Massachusetts Institute of Technology s motto mens et manus, mind and hand as well as heart by combining
COURSE 2 Mechanical Engineering at MIT The Department of Mechanical Engineering MechE embodies the Massachusetts Institute of Technology s motto mens et manus, mind and hand as well as heart by combining
MOD(ATLA) s Technology Strategy
 s Technology Strategy") MOD(ATLA) s Technology Strategy These documents were published on August 31. 1. Japan Defense Technology Strategy (JDTS) The main body of MOD(ATLA) s technology strategy 2. Medium-to-Long Term Defense
MOD(ATLA) s Technology Strategy These documents were published on August 31. 1. Japan Defense Technology Strategy (JDTS) The main body of MOD(ATLA) s technology strategy 2. Medium-to-Long Term Defense
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles. Dr. Nick Krouglicof 14 June 2012
 Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Automation Middleware and Algorithms for Robotic Underwater Sensor Networks
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Automation Middleware and Algorithms for Robotic Underwater Sensor Networks Fumin Zhang ECE, Georgia Institute of Technology
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Automation Middleware and Algorithms for Robotic Underwater Sensor Networks Fumin Zhang ECE, Georgia Institute of Technology
Mr Roland Rogers. Advisor Marine Law and Policy NOC. Session Chair Novel Adaptive Autonomous Ocean Sampling Networks (AAOSN
 Mr Roland Rogers Advisor Marine Law and Policy NOC Session Chair Novel Adaptive Autonomous Ocean Sampling Networks (AAOSN Autonomous Adaptive Ocean Sensing Networks rxr@noc.ac.uk Autonomous Adaptive Ocean
Mr Roland Rogers Advisor Marine Law and Policy NOC Session Chair Novel Adaptive Autonomous Ocean Sampling Networks (AAOSN Autonomous Adaptive Ocean Sensing Networks rxr@noc.ac.uk Autonomous Adaptive Ocean
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration
 Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
Under Water Systems. Sidescan SAS image mapping for Automatic Detection and Classification
 0 Sidescan SAS image mapping for Automatic Detection and Classification Plan Sidescan SAS image mapping for ADC Sidescan Synthetic Aperture Sonar Images Interest of SAS for automatic detection and classification
0 Sidescan SAS image mapping for Automatic Detection and Classification Plan Sidescan SAS image mapping for ADC Sidescan Synthetic Aperture Sonar Images Interest of SAS for automatic detection and classification
Modern Robotics with OpenCV. Widodo Budiharto
 Modern Robotics with OpenCV Widodo Budiharto Science Publishing Group 548 Fashion Avenue New York, NY 10018 Published by Science Publishing Group 2014 Copyright Widodo Budiharto 2014 All rights reserved.
Modern Robotics with OpenCV Widodo Budiharto Science Publishing Group 548 Fashion Avenue New York, NY 10018 Published by Science Publishing Group 2014 Copyright Widodo Budiharto 2014 All rights reserved.
Middleware and Software Frameworks in Robotics Applicability to Small Unmanned Vehicles
 Applicability to Small Unmanned Vehicles Daniel Serrano Department of Intelligent Systems, ASCAMM Technology Center Parc Tecnològic del Vallès, Av. Universitat Autònoma, 23 08290 Cerdanyola del Vallès
Applicability to Small Unmanned Vehicles Daniel Serrano Department of Intelligent Systems, ASCAMM Technology Center Parc Tecnològic del Vallès, Av. Universitat Autònoma, 23 08290 Cerdanyola del Vallès
Marine Sensor/Autonomous Underwater Vehicle Integration Project
 Marine Sensor/Autonomous Underwater Vehicle Integration Project Dr. Thomas L. Hopkins Department of Marine Science University of South Florida St. Petersburg, FL 33701-5016 phone: (727) 553-1501 fax: (727)
Marine Sensor/Autonomous Underwater Vehicle Integration Project Dr. Thomas L. Hopkins Department of Marine Science University of South Florida St. Petersburg, FL 33701-5016 phone: (727) 553-1501 fax: (727)
Detecting acoustic emissions of ships & submarines Italian Navy conducts tests with the Autonomous Acoustic Measurement System (SARA)
") Detecting acoustic emissions of ships & submarines Italian Navy conducts tests with the Autonomous Acoustic Measurement System (SARA) This application note discusses the solution used for the detection
Detecting acoustic emissions of ships & submarines Italian Navy conducts tests with the Autonomous Acoustic Measurement System (SARA) This application note discusses the solution used for the detection
Toward autonomous airships: research and developments at LAAS/CNRS
 Toward autonomous airships: research and developments at LAAS/CNRS Simon LACROIX LAAS / CNRS 7, Ave du Colonel Roche F-31077 TOULOUSE Cedex FRANCE E-mail: Simon.Lacroix@laas.fr Phone: +33 561 33 62 66
Toward autonomous airships: research and developments at LAAS/CNRS Simon LACROIX LAAS / CNRS 7, Ave du Colonel Roche F-31077 TOULOUSE Cedex FRANCE E-mail: Simon.Lacroix@laas.fr Phone: +33 561 33 62 66
INDUSTRY 4.0. Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO
 INDUSTRY 4.0 Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO Václav Snášel Faculty of Electrical Engineering and Computer Science VŠB-TUO Czech Republic AGENDA 1. Industry 4.0 2.
INDUSTRY 4.0 Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO Václav Snášel Faculty of Electrical Engineering and Computer Science VŠB-TUO Czech Republic AGENDA 1. Industry 4.0 2.
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Veicoli marini senza equipaggio: definizione di metodologie sperimentali
 Veicoli marini senza equipaggio: definizione di metodologie sperimentali Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via De Marini 6,
Veicoli marini senza equipaggio: definizione di metodologie sperimentali Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via De Marini 6,
Husky Robotics Team. Information Packet. Introduction
 Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
Autonomous Underwater Vehicles
 Autonomous Underwater Vehicles A View of the Autonomous Underwater Vehicle Market For a number of years now the Autonomous Underwater Vehicle (AUV) has been the undisputed tool of choice for certain niche
Autonomous Underwater Vehicles A View of the Autonomous Underwater Vehicle Market For a number of years now the Autonomous Underwater Vehicle (AUV) has been the undisputed tool of choice for certain niche
LABEX MS2T Management of Technological Systems of Systems
 LABEX MS2T Management of Technological Systems of Systems Thierry Denœux Université de Technologie de Compiègne HEUDIASYC, UMR CNRS 7253 https://www.hds.utc.fr/ tdenoeux SoSE 2018 workshop Paris, June
LABEX MS2T Management of Technological Systems of Systems Thierry Denœux Université de Technologie de Compiègne HEUDIASYC, UMR CNRS 7253 https://www.hds.utc.fr/ tdenoeux SoSE 2018 workshop Paris, June
Engineering Autonomy
 Engineering Autonomy Mr. Robert Gold Director, Engineering Enterprise Office of the Deputy Assistant Secretary of Defense for Systems Engineering 20th Annual NDIA Systems Engineering Conference Springfield,
Engineering Autonomy Mr. Robert Gold Director, Engineering Enterprise Office of the Deputy Assistant Secretary of Defense for Systems Engineering 20th Annual NDIA Systems Engineering Conference Springfield,
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
COMPUTER SCIENCE AND ENGINEERING
 COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
Enterprise ISEA of the Future a Technology Vision for Fleet Support
 N A V S E A N WA VA SR EF A RWE A CR EF NA RT E R CS E N T E R S Enterprise ISEA of the Future a Technology Vision for Fleet Support Paul D. Mann, SES NSWC PHD Division Technical Director April 10, 2018
N A V S E A N WA VA SR EF A RWE A CR EF NA RT E R CS E N T E R S Enterprise ISEA of the Future a Technology Vision for Fleet Support Paul D. Mann, SES NSWC PHD Division Technical Director April 10, 2018
Nagoya International School Parent Guide to Design
 Nagoya International School Parent Guide to Design Design is the fundamental soul of a man-made creation that ends up expressing itself in successive outer layers of a product or service. Steve Jobs Design
Nagoya International School Parent Guide to Design Design is the fundamental soul of a man-made creation that ends up expressing itself in successive outer layers of a product or service. Steve Jobs Design
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Non-Data Aided Doppler Shift Estimation for Underwater Acoustic Communication
 Non-Data Aided Doppler Shift Estimation for Underwater Acoustic Communication (Invited paper) Paul Cotae (Corresponding author) 1,*, Suresh Regmi 1, Ira S. Moskowitz 2 1 University of the District of Columbia,
Non-Data Aided Doppler Shift Estimation for Underwater Acoustic Communication (Invited paper) Paul Cotae (Corresponding author) 1,*, Suresh Regmi 1, Ira S. Moskowitz 2 1 University of the District of Columbia,
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Industry 4.0: the new challenge for the Italian textile machinery industry
 Industry 4.0: the new challenge for the Italian textile machinery industry Executive Summary June 2017 by Contacts: Economics & Press Office Ph: +39 02 4693611 email: economics-press@acimit.it ACIMIT has
Industry 4.0: the new challenge for the Italian textile machinery industry Executive Summary June 2017 by Contacts: Economics & Press Office Ph: +39 02 4693611 email: economics-press@acimit.it ACIMIT has
BORG. The team of the University of Groningen Team Description Paper
 BORG The RoboCup@Home team of the University of Groningen Team Description Paper Tim van Elteren, Paul Neculoiu, Christof Oost, Amirhosein Shantia, Ron Snijders, Egbert van der Wal, and Tijn van der Zant
BORG The RoboCup@Home team of the University of Groningen Team Description Paper Tim van Elteren, Paul Neculoiu, Christof Oost, Amirhosein Shantia, Ron Snijders, Egbert van der Wal, and Tijn van der Zant
Issues in Information Systems Volume 13, Issue 2, pp , 2012
 131 A STUDY ON SMART CURRICULUM UTILIZING INTELLIGENT ROBOT SIMULATION SeonYong Hong, Korea Advanced Institute of Science and Technology, gosyhong@kaist.ac.kr YongHyun Hwang, University of California Irvine,
131 A STUDY ON SMART CURRICULUM UTILIZING INTELLIGENT ROBOT SIMULATION SeonYong Hong, Korea Advanced Institute of Science and Technology, gosyhong@kaist.ac.kr YongHyun Hwang, University of California Irvine,