Les apports de la robotique collaborative en santé
|
|
|
- Cleopatra Rebecca Kelly
- 5 years ago
- Views:
Transcription


1 Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes et Applications Thérapeutiques Carnot Interfaces
2 Typology Autonomous robots The programmer gives high level instructions The robot translates into simple tasks Condition: the task can be described easily for a robot Autonomous robots are today limited to close environments and simple / repetitive tasks Collaborative robots Robotized tools A user is in the loop in realtime and controls the robot movements Control sharing Telemanipulation (the user is at a distance) vs comanipulation (user + robot co-localized). 2/16



3 Surgeon Patient Two types of collaborative robots Imaging device Telemanipulation Screen SLAVE ARM MASTER ARM Parallel comanipulation Serial comanipulation Orthotic comanipulation Comanipulation 3/16
4 Comanipulators A comanipulator is a smart active tool aimed at: Improving the user s performance: higher precision, faster task execution, safer task execution. Reducing the user s tiredness (short term) and fatigue (long term, e.g. musculoskeletal disorders). Reducing the learning curve for skill acquisition. Ultimately, it shall allow the realization of a task that is not feasible for the user otherwise (nor manually nor with standard passive instruments) 4/16



 Robotized limbs (robotic prosthetics). 5/16")
5 Applications for health Assistance to surgery / interventional gestures: Manual instruments integrating a robotized (or even simply motorized) functions Robots guiding a passive instrument held by the surgeon Assistance to patients with motor deficiency: Physical Medicine and Rehabilitation (robots that help motor learning) Permanent assistance to movements (e.g. robotized walking aids, exoskeletons, etc.) Robotized limbs (robotic prosthetics). 5/16
6 Challenges Robustness in control sharing : how to design the sensorimotor coupling so as to ease a gesture? Constraints : No ambiguous nor wrong behavior Strategies: understanding / anticipating human motor intentions and acting accordingly Applying force fields that change the tool/interaction dynamics so as to ease its manipulation Intuitiveness : how to ensure that the user does not ultimately, the user shall not notice it is a smart tool. It is just a tool that behaves without any Transparency when not used. 6/16

7 Example 1: guidance from a plan Credits: MakoSurgical 7/16

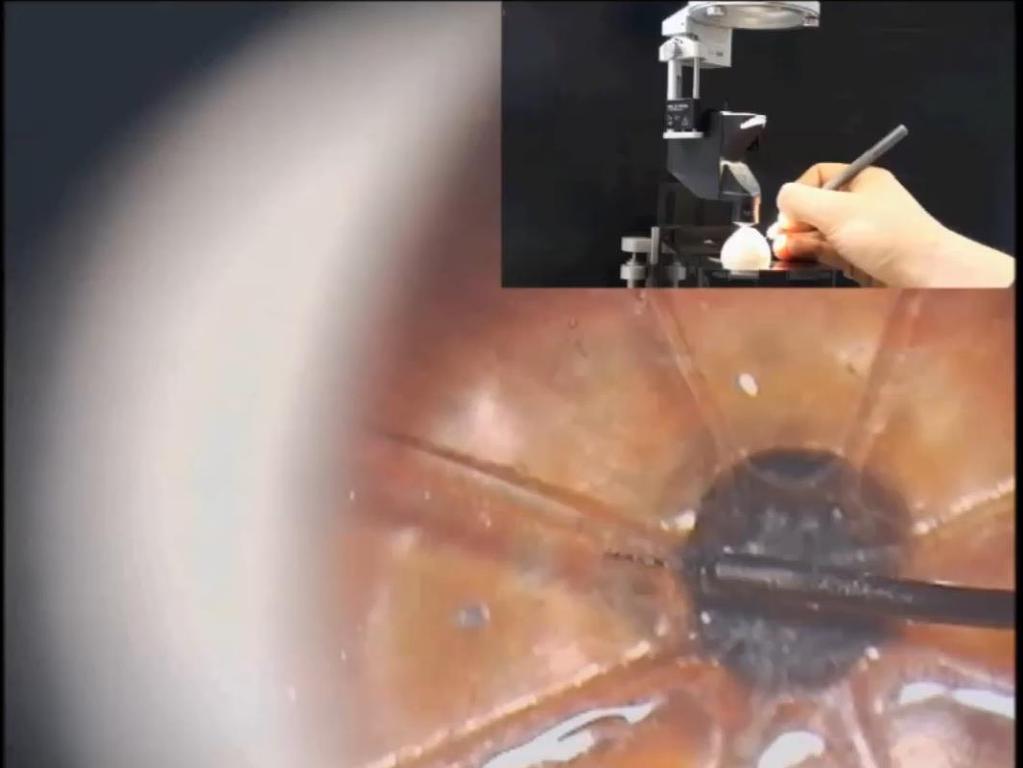
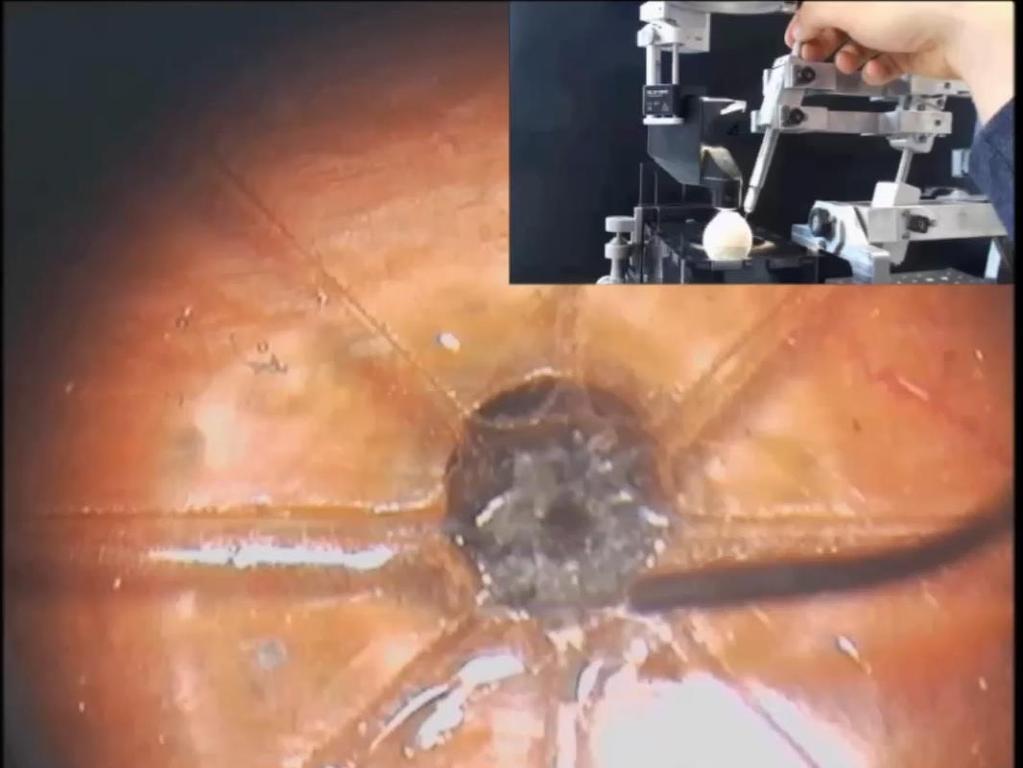


8 Example 2: Increasing Precision (1) Vibrations 10 µm 3 min - 45min Rotation Credits: Emmanuel Van Der Poorten, KU Leuven 8/16

")



9 Example 3: Increasing precision (2) Anchoring and actuation principles Generating mosaics with visual servoing 9/16


10 Example 4: enhancing dexterity 10/16


11 Example 5: rehabilitation robotics Credits: N. Hogan H. Krebs, MIT 11/16

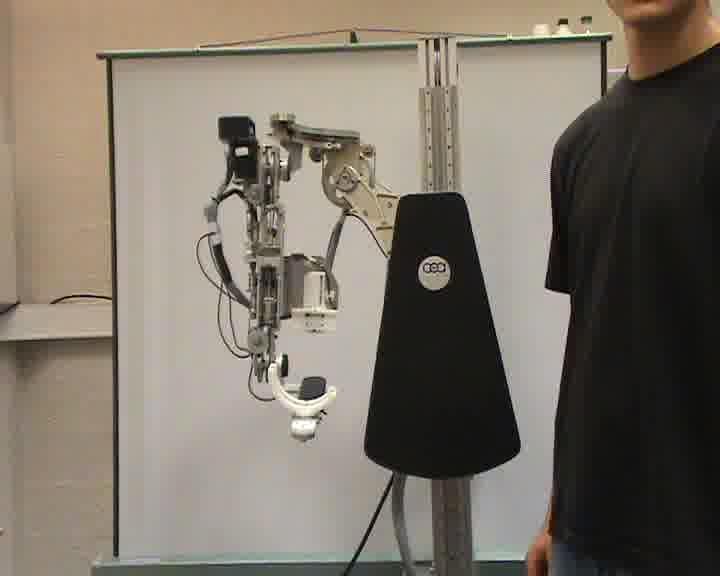
12 Example 6: exoskeletons for rehab 12/16



13 Example 7: Leg exoskeletons for patients without leg motor power Credits: Re-Walk Wandercraft 13/16





14 Example 8: smart walkers 14/16



15 Example 9: Prostheses with intuitive coupling / control 15/16
16 A short summary & conclusion Collaborative robotics is a relatively new approach, offering promises: Useful functions Easy adoption Safety improvement Cost reduction (as compared to e.g. telemanipulation) A wide range of technological and scientific questions, most of them pertaining to interactivity and robustness. Multidisciplinarity and translational research are a must. 16/16
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Medical Robotics Overview of the course
 Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation
 Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Digital Reality TM changes everything
 F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
EQ-ROBO Programming : bomb Remover Robot
 EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Challenges in emerging service robots
 MILITARY ISO TC299 Robotics SG1: Gaps and structure INDUSTRIAL ROBOTS PERSONAL CARE ROBOTS IEC TC62: Electrical equipment in medical practice SC 62A: Common aspects of electrical equipment used in medical
MILITARY ISO TC299 Robotics SG1: Gaps and structure INDUSTRIAL ROBOTS PERSONAL CARE ROBOTS IEC TC62: Electrical equipment in medical practice SC 62A: Common aspects of electrical equipment used in medical
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation
 MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation Rahman Davoodi and Gerald E. Loeb Department of Biomedical Engineering, University of Southern California Abstract.
MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation Rahman Davoodi and Gerald E. Loeb Department of Biomedical Engineering, University of Southern California Abstract.
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
RoboLaw The EU FP7 project on robotics and ELS
 InnoRobo 2015 Ethical Legal and Societal Issues in Robotics RoboLaw The EU FP7 project on robotics and ELS Dr. Andrea Bertolini a.bertolini@sssup.it Outline What Robolaw is and what it is not Fundamental
InnoRobo 2015 Ethical Legal and Societal Issues in Robotics RoboLaw The EU FP7 project on robotics and ELS Dr. Andrea Bertolini a.bertolini@sssup.it Outline What Robolaw is and what it is not Fundamental
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
INTELLIGENT HUMANOID LEGS
 INTELLIGENT HUMANOID LEGS GUNJAN KADU, SANKET ZADE Gunjan Kadu, Electronics and Telecommunication Engineering, SVPCET, Nagpur Maharashtra, India Sanket Zade, Electronics and Telecommunication Engineering,
INTELLIGENT HUMANOID LEGS GUNJAN KADU, SANKET ZADE Gunjan Kadu, Electronics and Telecommunication Engineering, SVPCET, Nagpur Maharashtra, India Sanket Zade, Electronics and Telecommunication Engineering,
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Man-Machine Synergy Effector
 Man-Machine Synergy Effector Anthropomorphic Robotic Tools based on Hybrid Approaches Dr. KANAOKA Katsuya Man-Machine Synergy Effectors Inc. & Advanced Robotics Research Center @ Ritsumeikan Univ. Imagine
Man-Machine Synergy Effector Anthropomorphic Robotic Tools based on Hybrid Approaches Dr. KANAOKA Katsuya Man-Machine Synergy Effectors Inc. & Advanced Robotics Research Center @ Ritsumeikan Univ. Imagine
Development of Running Robot Based on Charge Coupled Device
 Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Teleoperation. History and applications
 Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS
 FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
3-Degrees of Freedom Robotic ARM Controller for Various Applications
 3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Sensor-based robot control for Physical-Human Robot Interaction. IDH Interactive Digital Humans
 Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY
 TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY Josue Zarate Valdez Ruben Diaz Cucho University San Luis Gonzaga, Peru Abstract This project involves the implementation of a teleoperated arm using
TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY Josue Zarate Valdez Ruben Diaz Cucho University San Luis Gonzaga, Peru Abstract This project involves the implementation of a teleoperated arm using
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING
 HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING K.Gopal, Dr.N.Suthanthira Vanitha, M.Jagadeeshraja, and L.Manivannan, Knowledge Institute of Technology Abstract: - The advancement
HAPTIC BASED ROBOTIC CONTROL SYSTEM ENHANCED WITH EMBEDDED IMAGE PROCESSING K.Gopal, Dr.N.Suthanthira Vanitha, M.Jagadeeshraja, and L.Manivannan, Knowledge Institute of Technology Abstract: - The advancement
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Artificial Intelligence and Robotics Getting More Human
 Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Weekly Barometer 25 janvier 2012 Artificial Intelligence and Robotics Getting More Human July 2017 ATONRÂ PARTNERS SA 12, Rue Pierre Fatio 1204 GENEVA SWITZERLAND - Tel: + 41 22 310 15 01 http://www.atonra.ch
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
DPSI V-Match Operating Instructions Version 1.0
 Bedienungsanleitung Page 2 of 16 Contents 1. Functionality... 4 2. Programming... 6 2.1. Changing Servo Direction... 7 2.2. Calibrating Servo Center... 8 2.3. Calibrating End-Limits... 9 2.4. Deleting
Bedienungsanleitung Page 2 of 16 Contents 1. Functionality... 4 2. Programming... 6 2.1. Changing Servo Direction... 7 2.2. Calibrating Servo Center... 8 2.3. Calibrating End-Limits... 9 2.4. Deleting
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Robotic Swing Drive as Exploit of Stiffness Control Implementation
 Robotic Swing Drive as Exploit of Stiffness Control Implementation Nathan J. Nipper, Johnny Godowski, A. Arroyo, E. Schwartz njnipper@ufl.edu, jgodows@admin.ufl.edu http://www.mil.ufl.edu/~swing Machine
Robotic Swing Drive as Exploit of Stiffness Control Implementation Nathan J. Nipper, Johnny Godowski, A. Arroyo, E. Schwartz njnipper@ufl.edu, jgodows@admin.ufl.edu http://www.mil.ufl.edu/~swing Machine
Cooperative Transportation by Humanoid Robots Learning to Correct Positioning
 Cooperative Transportation by Humanoid Robots Learning to Correct Positioning Yutaka Inoue, Takahiro Tohge, Hitoshi Iba Department of Frontier Informatics, Graduate School of Frontier Sciences, The University
Cooperative Transportation by Humanoid Robots Learning to Correct Positioning Yutaka Inoue, Takahiro Tohge, Hitoshi Iba Department of Frontier Informatics, Graduate School of Frontier Sciences, The University
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Ground Robotics Market Analysis
 IHS AEROSPACE DEFENSE & SECURITY (AD&S) Presentation PUBLIC PERCEPTION Ground Robotics Market Analysis AUTONOMY 4 December 2014 ihs.com Derrick Maple, Principal Analyst, +44 (0)1834 814543, derrick.maple@ihs.com
IHS AEROSPACE DEFENSE & SECURITY (AD&S) Presentation PUBLIC PERCEPTION Ground Robotics Market Analysis AUTONOMY 4 December 2014 ihs.com Derrick Maple, Principal Analyst, +44 (0)1834 814543, derrick.maple@ihs.com
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
Robotics in Oil and Gas. Matt Ondler President / CEO
 Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
L09. PID, PURE PURSUIT
 1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
MARGE Project: Design, Modeling, and Control of Assistive Devices for Minimally Invasive Surgery
 MARGE Project: Design, Modeling, and Control of Assistive Devices for Minimally Invasive Surgery Etienne Dombre 1, Micaël Michelin 1, François Pierrot 1, Philippe Poignet 1, Philippe Bidaud 2, Guillaume
MARGE Project: Design, Modeling, and Control of Assistive Devices for Minimally Invasive Surgery Etienne Dombre 1, Micaël Michelin 1, François Pierrot 1, Philippe Poignet 1, Philippe Bidaud 2, Guillaume
VOICE CONTROL BASED PROSTHETIC HUMAN ARM
 VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation
 Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
3D User Interaction CS-525U: Robert W. Lindeman. Intro to 3D UI. Department of Computer Science. Worcester Polytechnic Institute.
 CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
Preliminary Design Review
 Preliminary Design Review S.H.A.R.C. Simulated Hand and Arm Remote Control Team 6 Connor Pope, Daniel Sheridan, Derek Caudill, Harrison Shecter October 22, 2015 Department of Electrical and Computer Engineering
Preliminary Design Review S.H.A.R.C. Simulated Hand and Arm Remote Control Team 6 Connor Pope, Daniel Sheridan, Derek Caudill, Harrison Shecter October 22, 2015 Department of Electrical and Computer Engineering
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Touching the microworld with force-feedback optical tweezers
 Touching the microworld with force-feedback optical tweezers Cécile Pacoret 1,2,,, Richard Bowman 3,, Graham Gibson 3, Sinan Haliyo 1, David Carberry 4, Arvid Bergander 2, Stéphane Régnier 1 and Miles
Touching the microworld with force-feedback optical tweezers Cécile Pacoret 1,2,,, Richard Bowman 3,, Graham Gibson 3, Sinan Haliyo 1, David Carberry 4, Arvid Bergander 2, Stéphane Régnier 1 and Miles
Advanced Robotics Trends in Medical Application
 Advanced Robotics Trends in Medical Application Binay Binod Kumar 1, Ravi kant 2, Manisha Sharma 3, Munesh Devi 4, 1,3,4 Assistant professor, ECE Deptt., Gateway Institute Of Engineering & Technology 2
Advanced Robotics Trends in Medical Application Binay Binod Kumar 1, Ravi kant 2, Manisha Sharma 3, Munesh Devi 4, 1,3,4 Assistant professor, ECE Deptt., Gateway Institute Of Engineering & Technology 2
Legged Capsule Robots In Medicine
 Legged Capsule Robots In Medicine Intelligent Robotics Seminar, Group TAMS, University of Hamburg Atefeh Mousavi 18/01/2016 1 Outline Motivation Medical Consideration 12-legged capsule robot and The spiral
Legged Capsule Robots In Medicine Intelligent Robotics Seminar, Group TAMS, University of Hamburg Atefeh Mousavi 18/01/2016 1 Outline Motivation Medical Consideration 12-legged capsule robot and The spiral
FINGER MOVEMENT DETECTION USING INFRARED SIGNALS
 FINGER MOVEMENT DETECTION USING INFRARED SIGNALS Dr. Jillella Venkateswara Rao. Professor, Department of ECE, Vignan Institute of Technology and Science, Hyderabad, (India) ABSTRACT It has been created
FINGER MOVEMENT DETECTION USING INFRARED SIGNALS Dr. Jillella Venkateswara Rao. Professor, Department of ECE, Vignan Institute of Technology and Science, Hyderabad, (India) ABSTRACT It has been created
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot
 An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
Wearable Robotics Funding Opportunities and Commercialization of Robotics and Mobility Systems Bruce Floersheim, Ph.D., P.E.
 Wearable Robotics Funding Opportunities and Commercialization of Robotics and Mobility Systems Bruce Floersheim, Ph.D., P.E. www.wearablerobotics.com Help shape a global future leveraging technology in
Wearable Robotics Funding Opportunities and Commercialization of Robotics and Mobility Systems Bruce Floersheim, Ph.D., P.E. www.wearablerobotics.com Help shape a global future leveraging technology in
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Los Alamos. DOE Office of Scientific and Technical Information LA-U R-9&%
 LA-U R-9&% Title: Author(s): Submitted M: Virtual Reality and Telepresence Control of Robots Used in Hazardous Environments Lawrence E. Bronisz, ESA-MT Pete C. Pittman, ESA-MT DOE Office of Scientific
LA-U R-9&% Title: Author(s): Submitted M: Virtual Reality and Telepresence Control of Robots Used in Hazardous Environments Lawrence E. Bronisz, ESA-MT Pete C. Pittman, ESA-MT DOE Office of Scientific
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS
 ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS D. GUZZONI 1, C. BAUR 1, A. CHEYER 2 1 VRAI Group EPFL 1015 Lausanne Switzerland 2 AIC SRI International Menlo Park, CA USA Today computers are
ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS D. GUZZONI 1, C. BAUR 1, A. CHEYER 2 1 VRAI Group EPFL 1015 Lausanne Switzerland 2 AIC SRI International Menlo Park, CA USA Today computers are
Active Inceptor Systems
 Active Inceptor Systems The world leader in active inceptor systems BAE Systems is the world leader in active inceptor systems. These systems reduce pilot workload while ensuring that the pilot remains
Active Inceptor Systems The world leader in active inceptor systems BAE Systems is the world leader in active inceptor systems. These systems reduce pilot workload while ensuring that the pilot remains
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
hal , version 1-30 May 2008
 Author manuscript, published in "7th France-Japon Congress Mecatronics'08 and the 5th Europe-Asia Congress Mecatronics'08., Le Grand Bornand : France (2008)" Study on a welfare robotic-type exoskeleton
Author manuscript, published in "7th France-Japon Congress Mecatronics'08 and the 5th Europe-Asia Congress Mecatronics'08., Le Grand Bornand : France (2008)" Study on a welfare robotic-type exoskeleton
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
ACTIVE LOW-FREQUENCY MODAL NOISE CANCELLA- TION FOR ROOM ACOUSTICS: AN EXPERIMENTAL STUDY
 ACTIVE LOW-FREQUENCY MODAL NOISE CANCELLA- TION FOR ROOM ACOUSTICS: AN EXPERIMENTAL STUDY Xavier Falourd, Hervé Lissek Laboratoire d Electromagnétisme et d Acoustique, Ecole Polytechnique Fédérale de Lausanne,
ACTIVE LOW-FREQUENCY MODAL NOISE CANCELLA- TION FOR ROOM ACOUSTICS: AN EXPERIMENTAL STUDY Xavier Falourd, Hervé Lissek Laboratoire d Electromagnétisme et d Acoustique, Ecole Polytechnique Fédérale de Lausanne,
CHAPTER 5 INDUSTRIAL ROBOTICS
 CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator
CHAPTER 5 INDUSTRIAL ROBOTICS 5.1 Basic of Robotics 5.1.1 Introduction There are two widely used definitions of industrial robots : i) An industrial robot is a reprogrammable, multifunctional manipulator