Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
|
|
|
- Cecil Strickland
- 5 years ago
- Views:
Transcription


1 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Describe an example of in-hand manipulation (3 pts)")
2 State one reason for investigating and building humanoid robot (4 pts) List two kinds of morphological communication (3 pts) Describe an example of in-hand manipulation (3 pts) 9/6/2018 2
3 Human surpasses current robots for overall performance Dexterity, energy-efficiency, versatility, reasoning, learning, selfadaption, compensation and recovery Build robotic embodiment to imitate human characteristics Appearance, voice, motion, intelligence Use humanoids as a tool for better understanding of human 9/6/2018 3



4 Expressive morphology and behavior Interpreting human expression Natural response in physical human-robot interaction 9/6/2018 4

5 9/6/2018 5
6
7 Platform Course projects 9/6/2018 7

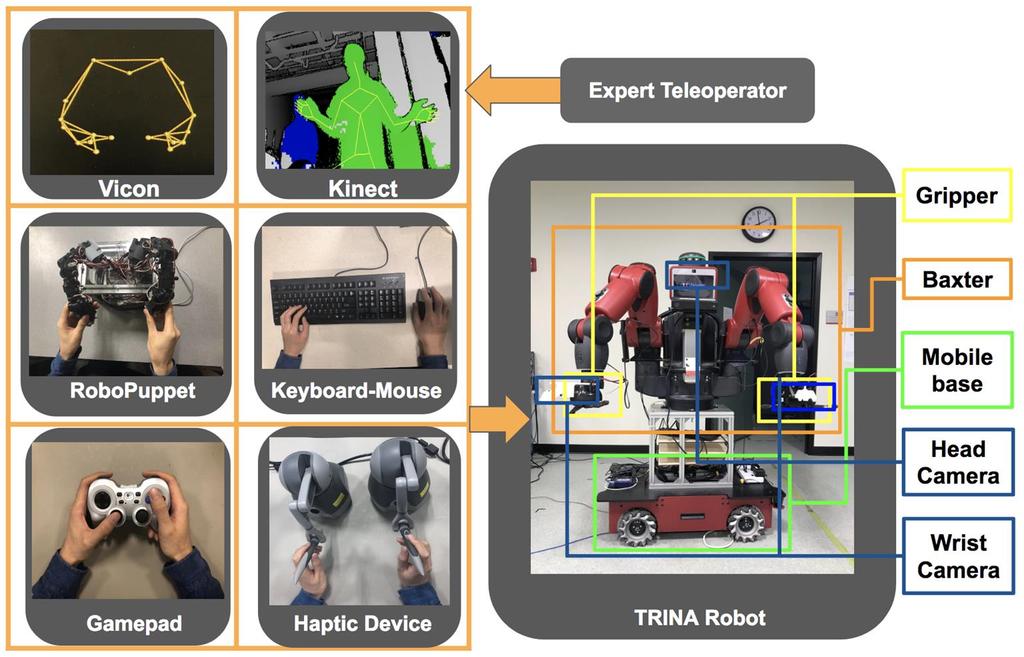
8 Major components Baxter robot Mobile base Compliant grippers 3D cameras 9/6/2018 8

9 Simulation mode Physical mode GUI Various input devices Multi-perspective camera views 9/6/2018 9

 Software Nexus human motion capture and")
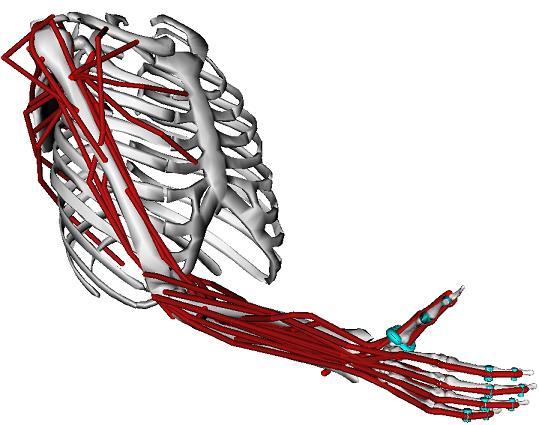
10 Hardware 10 cameras Vero 2.2 Max frame rate = 330 Hz Resolution 2048 x 1088 = 2.2 MP Covered space = 17 ft X 21 ft 8 on railing + 2 on ground (for closer view) Software Nexus human motion capture and analysis Tracker moving object tracking 9/6/


11 9/6/

12 9/6/

13 9/6/

14 9/6/
15
16 Standard projects Shared-autonomous motion coordination of nursing robot Contact TA Team 1 Hand-arm coordination Team 2 Perception-action coordination Team 3 Loco-manipulation Human-robot collaboration Contact Heramb Nemlekar Team 4 Robot-mediated handover Team 5 High-level learning of human-robot motion coordination Small projects 1-student: Soft robot hand (me), Kinect teleoperation interface (Sihui) 2-student: Physical fatigue assessment (me) 9/6/
17 Functional robot platform Debugging hardware is a pain! May be stuck by technical details of a software Experienced members in the team Starting from sketch takes much longer time Commitment of every team members Your project grade may be ruined if the team fall apart Healthy team dynamics Your leader is knowledgeable, reasonable, and helpful Your partners are trustworthy 9/6/
18 A good project team means Successful project outcome (35%) High-quality group literature review (10%) Continue current project in RBE 550 and direct research for thesis 9/6/
19 Find the team right for you Project survey form allow you to fill in preferred teammates Talk to project contact to see whether you like and project and have the right skill set Talk to your classmates and find the ones you like to work with It may be a good idea to choose a small project You can have full control of the project progress You can work at your comfortable pace 9/6/
20 HUMAN MOTION COORDINATION Human motion study Analyze human motion coordination Develop novel models for human motion prediction Learn human motion strategies Model validation Compare model prediction with more human motion data SHARED AUTONOMOUS NURSING ROBOT User study Evaluate task performance Identify user challenges Propose shared-autonomous robot control design Refer to human motion strategies User study for performance evaluation Compare with/without autonomy
21 Autonomous reach-to-grasp, perception-action coordination, loco-manipulation Assessment of physical fatigue in robot teleoperation
22 Risk-sensitive task, unstructured environments Nursing, in-home caring, surgery, rescue Needs human in the loop Teleoperation interface for robot learning Can also be used for robot teaching human 9/6/
23

24
25 Much slower than human performance Perception issues, robot s physical capability, interface design Large training efforts Need one hour or more for the demonstrated task Hard to control motion coordination Subjects can only focus on controlling one robot components Some interfaces does not support simultaneous control of many DOFs 9/6/
26 Reduce novice users effort Mental/physical, training and using Improve task performance Efficiency, robustness, safety Enable complex robot behaviors 9/6/
27 Teleoperation Interface Evaluation (A-term) Propose sharedautonomous robot control (B-term) Team 1 Team 2 Team 3 Teleoperate the nursing robot yourself to find: (1) How teleoperation is difficult? (2) How teleoperation is different for different interfaces? (3) What part of task can be shared-autonomous? (4) Desirable level of automation? Reach-to-grasp Perception-action coordination Loco-manipulation Leaders Sihui Li Alexandra Kene

28 Sihui Li 2 nd year PhD Research focus Shared autonomous tele-nursing robots Teleoperation interfaces, Learning from demonstration 9/6/

29 Kenechukwu C. Mbanisi 3rd year PhD Research focus Human motion modeling and learning Human performance assessment Human-vehicle interaction 9/6/

30 Alexandra Valiton 2nd year PhD Research focus Shared autonomous tele-nursing robot Interactive perception 9/6/



31 Distorted perspective Lack of depth perception Keyhole Effect: narrow FOV 9/6/

32 We conduct human experiment to examine How does behavior evolve with expertise? How do head and clavicle camera behavior differ? Is there any way to be successful with an active wrist camera? How does the subject use the perception camera? Which camera(s) does the subject choose, when given a choice? 9/6/
33 9/6/



34 Understanding human perception-action coordination to inspire development of robotic teleoperation interfaces How can a robot help the operator perceive a remote environment? How can remote perception be improved? How are vision and action coupled in human motion? 9/6/201834
35 Collect data in human and robot teleoperation experiments Model and Compare the camera usage in human motion coordination and teleoperated motion coordination Propose autonomous perception control based on human preference Implement on TRINA platform demonstration Sept Oct Nov Dec 9/6/
36
37 Heramb Nemlekar 2rd year Master Research focus Human-robot handover High-level motion planning

38 RBE 550 Motion Planning Instructor: Jane Li, Mechanical Engineering Department & Robotic Engineering Program - WPI 9/6/
39 9/6/
40 9/6/

41 9/6/

42 Learning parameters from human-human handovers Giver and receiver are not face-to-face Giver is Sitting vs Standing Giver is Moving Receiver using one hand vs both hands Generalizing prediction and robot response across variants of handovers 9/6/
43 Human motion analysis Conduct motion study for handovers Pre-process and segment human demonstrations Algorithm development Formulate regression models for OTP prediction Improve object detection for grasping Modify probabilistic estimation in ProMPs 9/6/
44 Parastegari et al, Modeling human reaching phase in human-human object handover with application in robot-human handover, in IROS D. Vogt et al, One-shot learning of human-robot handovers with triadic interaction meshes, Autonomous Robots, vol. 42, pp , M. Prada et al, Implementation and experimental validation of Dynamic Movement Primitives for object handover, in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, sep 2014, pp G. Maeda et al, Phase estimation for fast action recognition and trajectory generation in human robot collaboration, The International Journal of Robotics Research, vol. 36, (13-14), pp , /6/
45

46 Heramb Nemlekar 2rd year Master Research focus Human-robot handover High-level motion planning

47 Motivation High-level task plan can be built upon low-level motor skills Learning and planning can be more efficient at high-level 1. Leg1 Joint Leg3 Joint Arm Joint Hand Preshape Move to door 2. Grasp handle 3. Pull door open 4. Move ahead 5....
 Training data from human demonstrations Understand reward for each high-level state")

48 For robot to plan actions on a high level - Learn high-level actions (options) and states (symbols) Training data from human demonstrations Understand reward for each high-level state (symbol) Generate an optimal task plan for a daily activity Objectives Learn symbols & rewards for a loco-manipulation task Perform table-top organization task involving handovers 9/6/
49 Human motion analysis Conduct motion study Pre-process and segment human demonstrations Algorithm development Implement low-level options as autonomous functions Improve SVM classification Generate symbols for loco-manipulation task 9/6/
50 References: G.D. Konidaris, L.P. Kaelbling, and T. Lozano-Perez. From Skills to Symbols: Learning Symbolic Representations for Abstract High-Level Planning. Journal of Artificial Intelligence Research 61, pages , January Literature Keywords: High-level planning, Symbolic MDP, PDDL, STRIPS, Hierarchical reinforcement learning 9/6/
51


52 Tasks Integrate hand with tele-nursing robot Test hands with various grasping Compare to ReFlex SF hand for performance Outcome Interface for hand motion control Demonstration videos Fits for ECE/ME background Learning ROS 9/6/
53 Problem with current Kinect teleoperation: Hand orientation detection is problematic with Kinect only. Needs other hardwares (e.g. IMU) to be integrated. Goal - Full body teleoperation with Kinect Implement proposed methods and integrate into the Trina system. Compare Kinect teleoperation with Vicon teleoperation. Fits for: 1 student, CS background, familiar with Kinect 9/6/
54 What is fatigue? A feeling of tiredness and being unable to perform tasks effectively. Change in muscle and brain electrical activity Affects heart rate and oxygen levels Alters movement patterns and coordination, including posture and perception Fatigue Performance 9/6/


55 Delsys Trigno EMG/IMU Sensors 9/6/
56 When comparing interfaces, which causes the most/least fatigue? How does level of fatigue compare with speed or ease of use? How does fatigue develop differently in the different interfaces? Which teleoperation tasks cause the most/least fatigue? How can these results be combined to suggest an ideal teleoperation interface? 9/6/
57 Assist Kene and Alexandra in gathering pilot data Based on preliminary data, compare teleoperation interfaces Examine the data for trends in fatigue development Propose a teleoperation interface design that limits fatigue and maximizes effectiveness. 9/6/
58 Fill in the project choice survey 9/6/

59 Goal Integrate PPU with off-the-shelf parts Reference F. Wang, G. Chen, and K. Hauser. Robot Button Pressing In Human Environments. IEEE Intl Conf. on Robotics and Automation (ICRA), /6/
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (2 pts) How to avoid obstacles when reproducing a trajectory using a learned DMP?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (2 pts) How to avoid obstacles when reproducing a trajectory using a learned DMP?
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
2. Visually- Guided Grasping (3D)
") Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
CURRICULUM VITAE. Evan Drumwright EDUCATION PROFESSIONAL PUBLICATIONS
 CURRICULUM VITAE Evan Drumwright 209 Dunn Hall The University of Memphis Memphis, TN 38152 Phone: 901-678-3142 edrmwrgh@memphis.edu http://cs.memphis.edu/ edrmwrgh EDUCATION Ph.D., Computer Science, May
CURRICULUM VITAE Evan Drumwright 209 Dunn Hall The University of Memphis Memphis, TN 38152 Phone: 901-678-3142 edrmwrgh@memphis.edu http://cs.memphis.edu/ edrmwrgh EDUCATION Ph.D., Computer Science, May
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Stabilize humanoid robot teleoperated by a RGB-D sensor
 Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping
 Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Graphical Simulation and High-Level Control of Humanoid Robots
 In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Learning Probabilistic Models for Mobile Manipulation Robots
 Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence Learning Probabilistic Models for Mobile Manipulation Robots Jürgen Sturm and Wolfram Burgard University of Freiburg
Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence Learning Probabilistic Models for Mobile Manipulation Robots Jürgen Sturm and Wolfram Burgard University of Freiburg
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt
 Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
Siamak Ghorbani Faal. Education. Doctor of Philosophy. Master of Science. Bachelor of Science. Page 1 of 5
 Siamak Ghorbani Faal 44 Dover St., Worcester, MA, USA Tel: +1 (508) 410 1832 Email: sghorbanifaal@wpi.edu Website: http://www.wpi.edu/~sghorbanifaal/ Education Doctor of Philosophy Robotics Engineering
Siamak Ghorbani Faal 44 Dover St., Worcester, MA, USA Tel: +1 (508) 410 1832 Email: sghorbanifaal@wpi.edu Website: http://www.wpi.edu/~sghorbanifaal/ Education Doctor of Philosophy Robotics Engineering
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with Disabilities
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
National Aeronautics and Space Administration
 National Aeronautics and Space Administration 2013 Spinoff (spin ôf ) -noun. 1. A commercialized product incorporating NASA technology or expertise that benefits the public. These include products or processes
National Aeronautics and Space Administration 2013 Spinoff (spin ôf ) -noun. 1. A commercialized product incorporating NASA technology or expertise that benefits the public. These include products or processes
Development of a Laboratory Kit for Robotics Engineering Education
 Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Wirelessly Controlled Wheeled Robotic Arm
 Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Designing Robot Collectives
 Designing Robot Collectives by Kirstin Petersen July 2017 Motivation January 2004 Distance to Mars: 34-250M miles Travel time: 39-289 days Cost: $1B April 2009 Designing Robot Collectives Instead of sending
Designing Robot Collectives by Kirstin Petersen July 2017 Motivation January 2004 Distance to Mars: 34-250M miles Travel time: 39-289 days Cost: $1B April 2009 Designing Robot Collectives Instead of sending
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Integrated HMM-Based Intelligent Robotic Assembly System
 An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Anticipative Interaction Primitives for Human-Robot Collaboration
 The 2016 AAAI Fall Symposium Series: Shared Autonomy in Research and Practice Technical Report FS-16-05 Anticipative Interaction Primitives for Human-Robot Collaboration Guilherme Maeda, 1 Aayush Maloo,
The 2016 AAAI Fall Symposium Series: Shared Autonomy in Research and Practice Technical Report FS-16-05 Anticipative Interaction Primitives for Human-Robot Collaboration Guilherme Maeda, 1 Aayush Maloo,
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Physical and Affective Interaction between Human and Mental Commit Robot
 Proceedings of the 21 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 21 Physical and Affective Interaction between Human and Mental Commit Robot Takanori Shibata Kazuo Tanie
Proceedings of the 21 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 21 Physical and Affective Interaction between Human and Mental Commit Robot Takanori Shibata Kazuo Tanie
Ehsan Noohi Bezanjani
 Ehsan Noohi Bezanjani University of Illinois at Chicago Department of ECE (M/C 154) 1020 Science and Engineering Offices 851 South Morgan Street Chicago, IL 60607-7053 Office: 4211 SEL-W Email: enoohi2@uic.edu
Ehsan Noohi Bezanjani University of Illinois at Chicago Department of ECE (M/C 154) 1020 Science and Engineering Offices 851 South Morgan Street Chicago, IL 60607-7053 Office: 4211 SEL-W Email: enoohi2@uic.edu
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (4 pts) Derive Dynamic equations and state space representation for the system.
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (4 pts) Derive Dynamic equations and state space representation for the system.
Objective Data Analysis for a PDA-Based Human-Robotic Interface*
 Objective Data Analysis for a PDA-Based Human-Robotic Interface* Hande Kaymaz Keskinpala EECS Department Vanderbilt University Nashville, TN USA hande.kaymaz@vanderbilt.edu Abstract - This paper describes
Objective Data Analysis for a PDA-Based Human-Robotic Interface* Hande Kaymaz Keskinpala EECS Department Vanderbilt University Nashville, TN USA hande.kaymaz@vanderbilt.edu Abstract - This paper describes
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
PROJECTS 2017/18 AUTONOMOUS SYSTEMS. Instituto Superior Técnico. Departamento de Engenharia Electrotécnica e de Computadores September 2017
 AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Using Gestures to Interact with a Service Robot using Kinect 2
 Using Gestures to Interact with a Service Robot using Kinect 2 Harold Andres Vasquez 1, Hector Simon Vargas 1, and L. Enrique Sucar 2 1 Popular Autonomous University of Puebla, Puebla, Pue., Mexico {haroldandres.vasquez,hectorsimon.vargas}@upaep.edu.mx
Using Gestures to Interact with a Service Robot using Kinect 2 Harold Andres Vasquez 1, Hector Simon Vargas 1, and L. Enrique Sucar 2 1 Popular Autonomous University of Puebla, Puebla, Pue., Mexico {haroldandres.vasquez,hectorsimon.vargas}@upaep.edu.mx
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
NTU Robot PAL 2009 Team Report
 NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
Designing Toys That Come Alive: Curious Robots for Creative Play
 Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks
 Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks Muh Anshar Faculty of Engineering and Information Technology
Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks Muh Anshar Faculty of Engineering and Information Technology
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot
 International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
CS 309: Autonomous Intelligent Robotics FRI I. Instructor: Justin Hart.
 CS 309: Autonomous Intelligent Robotics FRI I Instructor: Justin Hart http://justinhart.net/teaching/2017_fall_cs378/ Today Basic Information, Preliminaries FRI Autonomous Robots Overview Panel with the
CS 309: Autonomous Intelligent Robotics FRI I Instructor: Justin Hart http://justinhart.net/teaching/2017_fall_cs378/ Today Basic Information, Preliminaries FRI Autonomous Robots Overview Panel with the
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Learning Actions from Demonstration
 Learning Actions from Demonstration Michael Tirtowidjojo, Matthew Frierson, Benjamin Singer, Palak Hirpara October 2, 2016 Abstract The goal of our project is twofold. First, we will design a controller
Learning Actions from Demonstration Michael Tirtowidjojo, Matthew Frierson, Benjamin Singer, Palak Hirpara October 2, 2016 Abstract The goal of our project is twofold. First, we will design a controller
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
Sustainable & Intelligent Robotics Group Projects
 Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Secure High-Bandwidth Communications for a Fleet of Low-Cost Ground Robotic Vehicles. ZZZ (Advisor: Dr. A.A. Rodriguez, Electrical Engineering)
") Secure High-Bandwidth Communications for a Fleet of Low-Cost Ground Robotic Vehicles GOALS. The proposed research shall focus on meeting critical objectives toward achieving the long-term goal of developing
Secure High-Bandwidth Communications for a Fleet of Low-Cost Ground Robotic Vehicles GOALS. The proposed research shall focus on meeting critical objectives toward achieving the long-term goal of developing
Open Source Voices Interview Series Podcast, Episode 03: How Is Open Source Important to the Future of Robotics? English Transcript
 [Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
[Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
LASA I PRESS KIT lasa.epfl.ch I EPFL-STI-IMT-LASA Station 9 I CH 1015, Lausanne, Switzerland
 LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shared Presence and Collaboration Using a Co-Located Humanoid Robot
 Shared Presence and Collaboration Using a Co-Located Humanoid Robot Johann Wentzel 1, Daniel J. Rea 2, James E. Young 2, Ehud Sharlin 1 1 University of Calgary, 2 University of Manitoba jdwentze@ucalgary.ca,
Shared Presence and Collaboration Using a Co-Located Humanoid Robot Johann Wentzel 1, Daniel J. Rea 2, James E. Young 2, Ehud Sharlin 1 1 University of Calgary, 2 University of Manitoba jdwentze@ucalgary.ca,