Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
|
|
|
- Darlene Hodges
- 5 years ago
- Views:
Transcription
1 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte
2 Outline Problem and Context Basic RAMP Framework Extension and Application of RAMP Multiple Mobile Manipulators Nonholonomic Robot Vehicle Mobile Robots in Pursuit and Evasion Continuum Manipulator
3 Basic Problem Plan the motion of a robot from a starting location to reach a goal in an environment with unknown obstacles or unknown obstacle motions. The robot can have high degrees of freedom and redundancy (e.g., a mobile manipulator). Robot motion planning has to be on-line based on sensing.
4 Motion planning for robot manipulators (DOF 6): existing work Off-line planning in known environments using sampling-based approaches, such as variants of PRM and RRT. On-line modifying pre-planned paths in largely known environments to avoid new obstacles or obstacle motion. Motion objectives or goals are often fixed. Relatively little work on real-time motion planning in unknown and unpredictable environments.
5 Real-time Adaptive Motion Planning (RAMP) Paradigm [Vannoy&Xiao 04-08] Interweave planning, sensing, and execution of motion: plan path and trajectory simultaneously plan and execute motion simultaneously Global planning is inspired by the general anytime and parallel idea of evolutionary computation Adapt or change motion objectives on the fly based on need
6 Information from Sensing Target objects, obstacles, and their poses at each sensing instant. Obstacles may not have to be segmented or identified. Two types of approaches to handle obstacles of unknown motion: Predict short-term obstacle trajectory based on time history of sensed obstacle poses requiring obstacle identification Perceive if a robot at a pose at a future time will not collide with any obstacle no matter how obstacles move based on the concept of dynamic envelopes [Vatcha&Xiao08] not requiring obstacle segmentation or identification
7 RAMP Algorithm Initialize a set of trajectories P leading to the goal(s) and evaluate P based on initial sensed information γ best trajectory in P; while goal is not reached do simultaneously move and plan: move along γ unless forced to stop to avoid collision; Sensing Planning Adaptation plan: modify P if new sensing cycle then evaluate P; if new adaptation cycle then update starting configurations of P; evaluate P and update γ; end while The algorithm allows the robot to smoothly switch to a better trajectory at any time during execution
8 Trajectory Initialization Generate m trajectories in P: either randomly or deliberately generate a path in terms of a sequence of knot configurations in the configuration space of the robot. (optional) generate goal configuration(s) generate trajectory under max. velocity and acceleration constraints Trajectory diversity in set P is important.
9 Evaluation Optimization criteria are different for completely feasible or partially feasible trajectories. Feasible (i.e., collision-free and singularity free): e.g., Minimize distance or time to goal Minimize energy Maximize manipulability Maximize goodness of goal if there are alternative goals Partially feasible: e.g., Time or distance to first collision or singularity Cost as if feasible + penalty Optimization criteria can be changed on the fly based on circumstances to steer planning in more effective directions.
10 Modification Modify the shape of a path or create a new path by generically random insert, delete, change, swap, crossover and some robot-specific random operators Modified trajectory is evaluated and replaces randomly a non-best trajectory in P to promote the best while preserving diversity.
11 RAMP on Mobile Manipulators Trajectory: cubic-splined for arm and linear-with-parabolic-blends for base Special modification operator: random stop modifies the velocity profile to allow loose-coupling of the arm and the base for adaptive redundancy resolution
12 Loose Collaboration Multiple Mobile manipulators pick up a large set of objects of unknown quantity and arrangement and move them to some destinations or re-arrange them. Every robot has its own RAMP planner and view other robots as obstacles with unknown motions. Real-time, distributed motion planning is achieved. Spontaneous division of work each robot decides a target object for pick-up and a destination to put it down on the fly based on availability.
13 Examples

14 Tight Coordination Planning motion trajectories for two mobile manipulators moving and manipulating an object together through an environment with obstacles of unknown motion. Each mobile manipulator in the two-robot team is equipped with its own instance of the same realtime leader-oriented planner.
15 The Leader-oriented Planner Each mobile manipulator plans its motion as the leader with RAMP and then the other robot s motion as the helper s motion constrained by the leader s. The two robots run their planners in parallel at the same time as they move, but the actual motions that the robots execute are determined by a simple coordinator algorithm running on top of the two parallel planners. The coordinator constantly decides which robot s leaderhelper motion plan is better and let the two-robot team to execute the better motion plan. At any time, the roles can be switched seamlessly as the robots always follow the better trajectories.
16 RAMP on Nonholonomic Robot Vehicle A robotic vehicle moves autonomously in an unknown environment guided by a GPS navigator and local sensing. The GPS system does not indicate the actual geometry of the road as well as small obstacles. The robot has to conduct on-line planning based on local sensing to produce collision-free nonholonomic trajectories for it to follow.
17 Approach Introduce a set of parameterized, basic maneuver patterns that our RAMP planner can use to build nonholonomic trajectories with arbitrary turns quickly in a piece-wise fashion. The maneuver patterns use Bezier curves, which allow both forward and backward driving of a vehicle with great flexibility, can be modified analytically via control points an advantage over clothoids, and allow higher vehicle speeds than Reeds & Shepp curves. Special modification operators
18 Assumptions A sequence of knot points are given (from GPS) that capture the topology of the path. Environment is unknown, but obstacles are visible if within sensing range.
19 Implementation Results Example 1 Example 2 Note the quasi-static moving obstacle above
20 RAMP on Pursuit and Evasion Two mobile robots: one pursuer and one evader. Each moves in an initially unknown environment and relies on line-of-sight sensing to discover the environment and the other agent. The pursuer aims to catch the evader without knowing its motion and destination. The evader aims to reach its destination as quickly as possible while avoiding being caught by the purser.
21 Approach Each agent has a RAMP-based motion planner. Each agent is unaware of the other s motion strategies. Optimization objectives are dynamically changed based on an agent's need: escaping, goal-seeking, or hiding for the evader, and chasing based on recent sighting or exploring possible evader locations for the pursuer.
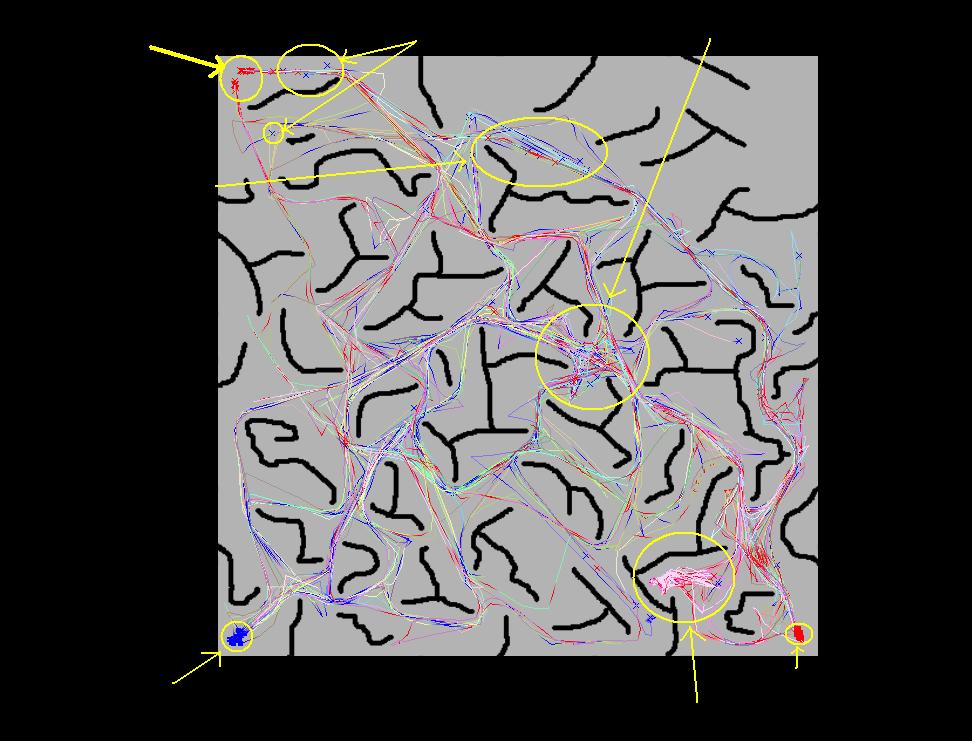
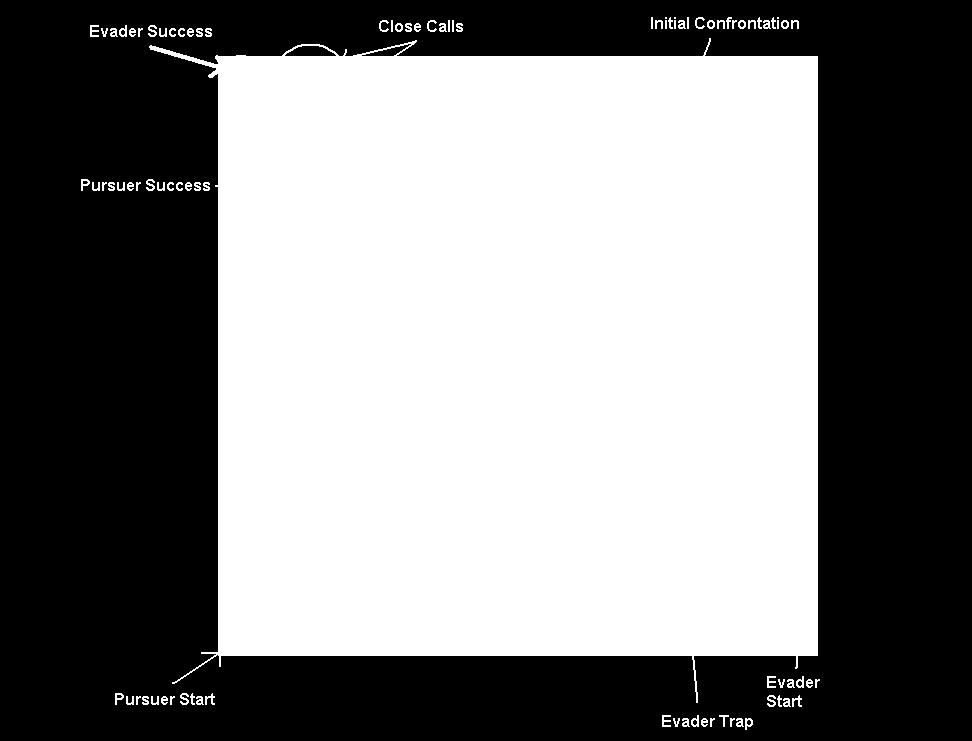
22
23 RAMP on Continuum Manipulators A continuum manipulator is inherently smooth and compliant and can deform almost everywhere. A three-section OctArm designed by Walker et al. at Clemson University Configuration variables for each section: κ, s, ϕ
24 Special Features Goals must be generated and adapted along with the motion to reach a goal by the planner. Path/trajectory evaluation includes a unique distance metric and a goodness measure for goals. Special modification operators: repair and curl-up.


25 Some real experiments 7-DOF manipulator in unknown environment with stereo vision sensing. Obstacles are not segmented/identified.
26 Conclusions Introduced a general RAMP paradigm for on-line motion planning of high-dof robots or teams of robots in unknown and unpredictable environments. Further work is on effective sensing and real-world testing of RAMP. Extend RAMP to incorporate compliant motion, especially for continuum robot manipulation.
27 Acknowledgement Dick Volz for guiding me into robotics research The work presented here is done mostly by my (former and current) students: John Vannoy Yanbo Li Rayomand Vatcha Jonathan Annas Work on continuum robots is a collaboration with Ian Walker s group The work has been supported by NSF grants.
28 References J. Vannoy and J. Xiao, Real-time Adaptive Motion Planning (RAMP) of Mobile Manipulators in Dynamic Environments with Unforeseen Changes," IEEE Transactions on Robotics, 24(5): , Oct J. Vannoy and J. Xiao, Real-time motion planning of multiple mobile manipulators with a common task objective in shared work environments, IEEE International Conference on Robotics and Automation, April J. Vannoy and J. Xiao, Real-time Tight Coordination of Mobile Manipulators in Unknown Dynamic Environments, IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct R. Vatcha and J. Xiao, "Perceived CT-Space for Motion Planning in Unknown and Unpredictable Environments," Proceedings of the 8th International Workshop on Algorithmic Foundations of Robotics (WAFR), Guanajuato, Mexico, Dec. 7--9, Y. Li and J. Xiao, "On-line Planning of Nonholonomic Trajectories in Crowded and Geometrically Unknown Environments, IEEE International Conference on Robotics and Automation, Kobe, Japan, May J. Annas and J. Xiao, "Intelligent Pursuit & Evasion in an Unknown Environment, IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, Oct
Safe and Efficient Autonomous Navigation in the Presence of Humans at Control Level
 Safe and Efficient Autonomous Navigation in the Presence of Humans at Control Level Klaus Buchegger 1, George Todoran 1, and Markus Bader 1 Vienna University of Technology, Karlsplatz 13, Vienna 1040,
Safe and Efficient Autonomous Navigation in the Presence of Humans at Control Level Klaus Buchegger 1, George Todoran 1, and Markus Bader 1 Vienna University of Technology, Karlsplatz 13, Vienna 1040,
Transactions on Information and Communications Technologies vol 6, 1994 WIT Press, ISSN
 Application of artificial neural networks to the robot path planning problem P. Martin & A.P. del Pobil Department of Computer Science, Jaume I University, Campus de Penyeta Roja, 207 Castellon, Spain
Application of artificial neural networks to the robot path planning problem P. Martin & A.P. del Pobil Department of Computer Science, Jaume I University, Campus de Penyeta Roja, 207 Castellon, Spain
A Reconfigurable Guidance System
 Lecture tes for the Class: Unmanned Aircraft Design, Modeling and Control A Reconfigurable Guidance System Application to Unmanned Aerial Vehicles (UAVs) y b right aileron: a2 right elevator: e 2 rudder:
Lecture tes for the Class: Unmanned Aircraft Design, Modeling and Control A Reconfigurable Guidance System Application to Unmanned Aerial Vehicles (UAVs) y b right aileron: a2 right elevator: e 2 rudder:
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
Robot Crowd Navigation using Predictive Position Fields in the Potential Function Framework
 Robot Crowd Navigation using Predictive Position Fields in the Potential Function Framework Ninad Pradhan, Timothy Burg, and Stan Birchfield Abstract A potential function based path planner for a mobile
Robot Crowd Navigation using Predictive Position Fields in the Potential Function Framework Ninad Pradhan, Timothy Burg, and Stan Birchfield Abstract A potential function based path planner for a mobile
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
CRYPTOSHOOTER MULTI AGENT BASED SECRET COMMUNICATION IN AUGMENTED VIRTUALITY
 CRYPTOSHOOTER MULTI AGENT BASED SECRET COMMUNICATION IN AUGMENTED VIRTUALITY Submitted By: Sahil Narang, Sarah J Andrabi PROJECT IDEA The main idea for the project is to create a pursuit and evade crowd
CRYPTOSHOOTER MULTI AGENT BASED SECRET COMMUNICATION IN AUGMENTED VIRTUALITY Submitted By: Sahil Narang, Sarah J Andrabi PROJECT IDEA The main idea for the project is to create a pursuit and evade crowd
Autonomous Robo+c Manipula+on
 Autonomous Robo+c Manipula+on Jing Xiao, IEEE Fellow Robo+cs Research Lab, Professor of Computer Science College of Compu+ng and Informa+cs xiao@uncc.edu Site Director NSF Industry/University Coopera+ve
Autonomous Robo+c Manipula+on Jing Xiao, IEEE Fellow Robo+cs Research Lab, Professor of Computer Science College of Compu+ng and Informa+cs xiao@uncc.edu Site Director NSF Industry/University Coopera+ve
An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment
 An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment Ching-Chang Wong, Hung-Ren Lai, and Hui-Chieh Hou Department of Electrical Engineering, Tamkang University Tamshui, Taipei
An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment Ching-Chang Wong, Hung-Ren Lai, and Hui-Chieh Hou Department of Electrical Engineering, Tamkang University Tamshui, Taipei
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Improvement of Robot Path Planning Using Particle. Swarm Optimization in Dynamic Environments. with Mobile Obstacles and Target
 Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes
 International Journal of Information and Electronics Engineering, Vol. 3, No. 3, May 13 Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes Soheila Dadelahi, Mohammad Reza Jahed
International Journal of Information and Electronics Engineering, Vol. 3, No. 3, May 13 Obstacle Displacement Prediction for Robot Motion Planning and Velocity Changes Soheila Dadelahi, Mohammad Reza Jahed
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Physics-Based Manipulation in Human Environments
 Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
A New Analytical Representation to Robot Path Generation with Collision Avoidance through the Use of the Collision Map
 International A New Journal Analytical of Representation Control, Automation, Robot and Path Systems, Generation vol. 4, no. with 1, Collision pp. 77-86, Avoidance February through 006 the Use of 77 A
International A New Journal Analytical of Representation Control, Automation, Robot and Path Systems, Generation vol. 4, no. with 1, Collision pp. 77-86, Avoidance February through 006 the Use of 77 A
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
A Toolbox of Hamilton-Jacobi Solvers for Analysis of Nondeterministic Continuous and Hybrid Systems
 A Toolbox of Hamilton-Jacobi Solvers for Analysis of Nondeterministic Continuous and Hybrid Systems Ian Mitchell Department of Computer Science University of British Columbia Jeremy Templeton Department
A Toolbox of Hamilton-Jacobi Solvers for Analysis of Nondeterministic Continuous and Hybrid Systems Ian Mitchell Department of Computer Science University of British Columbia Jeremy Templeton Department
Motion of Robots in a Non Rectangular Workspace K Prasanna Lakshmi Asst. Prof. in Dept of Mechanical Engineering JNTU Hyderabad
 International Journal of Engineering Inventions e-issn: 2278-7461, p-isbn: 2319-6491 Volume 2, Issue 3 (February 2013) PP: 35-40 Motion of Robots in a Non Rectangular Workspace K Prasanna Lakshmi Asst.
International Journal of Engineering Inventions e-issn: 2278-7461, p-isbn: 2319-6491 Volume 2, Issue 3 (February 2013) PP: 35-40 Motion of Robots in a Non Rectangular Workspace K Prasanna Lakshmi Asst.
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Decision Science Letters
 Decision Science Letters 3 (2014) 121 130 Contents lists available at GrowingScience Decision Science Letters homepage: www.growingscience.com/dsl A new effective algorithm for on-line robot motion planning
Decision Science Letters 3 (2014) 121 130 Contents lists available at GrowingScience Decision Science Letters homepage: www.growingscience.com/dsl A new effective algorithm for on-line robot motion planning
Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment
 Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment Fatma Boufera 1, Fatima Debbat 2 1,2 Mustapha Stambouli University, Math and Computer Science Department Faculty
Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment Fatma Boufera 1, Fatima Debbat 2 1,2 Mustapha Stambouli University, Math and Computer Science Department Faculty
CMDragons 2009 Team Description
 CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
A Novel Hybrid Fuzzy A* Robot Navigation System for Target Pursuit and Obstacle Avoidance
 A Novel Hybrid Fuzzy A* Robot Navigation System for Target Pursuit and Obstacle Avoidance Antony P. Gerdelan Computer Science Institute of Information and Mathematical Sciences Massey University, Albany
A Novel Hybrid Fuzzy A* Robot Navigation System for Target Pursuit and Obstacle Avoidance Antony P. Gerdelan Computer Science Institute of Information and Mathematical Sciences Massey University, Albany
Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution
 Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution Eiji Uchibe, Masateru Nakamura, Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Eng., Osaka University,
Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution Eiji Uchibe, Masateru Nakamura, Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Eng., Osaka University,
Obstacle Avoidance in Collective Robotic Search Using Particle Swarm Optimization
 Avoidance in Collective Robotic Search Using Particle Swarm Optimization Lisa L. Smith, Student Member, IEEE, Ganesh K. Venayagamoorthy, Senior Member, IEEE, Phillip G. Holloway Real-Time Power and Intelligent
Avoidance in Collective Robotic Search Using Particle Swarm Optimization Lisa L. Smith, Student Member, IEEE, Ganesh K. Venayagamoorthy, Senior Member, IEEE, Phillip G. Holloway Real-Time Power and Intelligent
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Cooperative robot team navigation strategies based on an environmental model
 Cooperative robot team navigation strategies based on an environmental model P. Urcola and L. Montano Instituto de Investigación en Ingeniería de Aragón, University of Zaragoza (Spain) Email: {urcola,
Cooperative robot team navigation strategies based on an environmental model P. Urcola and L. Montano Instituto de Investigación en Ingeniería de Aragón, University of Zaragoza (Spain) Email: {urcola,
Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA. University of Tsukuba. Tsukuba, Ibaraki, 305 JAPAN
 Long distance outdoor navigation of an autonomous mobile robot by playback of Perceived Route Map Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA Intelligent Robot Laboratory Institute of Information Science
Long distance outdoor navigation of an autonomous mobile robot by playback of Perceived Route Map Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA Intelligent Robot Laboratory Institute of Information Science
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
E190Q Lecture 15 Autonomous Robot Navigation
 E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
E190Q Lecture 15 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2014 1 Figures courtesy of Probabilistic Robotics (Thrun et. Al.) Control Structures Planning Based Control Prior Knowledge
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
An evolutionary method of ship's anti-collision trajectory planning: new experiments
 An evolutionary method of ship's anti-collision trajectory planning: new experiments R. Kaminski and R. Smierzchalski Gdynia Maritime Academy, ul. Morska 83, Gdynia, Poland, Abstract In a collision situation
An evolutionary method of ship's anti-collision trajectory planning: new experiments R. Kaminski and R. Smierzchalski Gdynia Maritime Academy, ul. Morska 83, Gdynia, Poland, Abstract In a collision situation
Smooth collision avoidance in human-robot coexisting environment
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Smooth collision avoidance in human-robot coexisting environment Yusue Tamura, Tomohiro
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Smooth collision avoidance in human-robot coexisting environment Yusue Tamura, Tomohiro
An Improved Path Planning Method Based on Artificial Potential Field for a Mobile Robot
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
Flocking-Based Multi-Robot Exploration
 Flocking-Based Multi-Robot Exploration Noury Bouraqadi and Arnaud Doniec Abstract Dépt. Informatique & Automatique Ecole des Mines de Douai France {bouraqadi,doniec}@ensm-douai.fr Exploration of an unknown
Flocking-Based Multi-Robot Exploration Noury Bouraqadi and Arnaud Doniec Abstract Dépt. Informatique & Automatique Ecole des Mines de Douai France {bouraqadi,doniec}@ensm-douai.fr Exploration of an unknown
Tasks prioritization for whole-body realtime imitation of human motion by humanoid robots
 Tasks prioritization for whole-body realtime imitation of human motion by humanoid robots Sophie SAKKA 1, Louise PENNA POUBEL 2, and Denis ĆEHAJIĆ3 1 IRCCyN and University of Poitiers, France 2 ECN and
Tasks prioritization for whole-body realtime imitation of human motion by humanoid robots Sophie SAKKA 1, Louise PENNA POUBEL 2, and Denis ĆEHAJIĆ3 1 IRCCyN and University of Poitiers, France 2 ECN and
Correcting Odometry Errors for Mobile Robots Using Image Processing
 Correcting Odometry Errors for Mobile Robots Using Image Processing Adrian Korodi, Toma L. Dragomir Abstract - The mobile robots that are moving in partially known environments have a low availability,
Correcting Odometry Errors for Mobile Robots Using Image Processing Adrian Korodi, Toma L. Dragomir Abstract - The mobile robots that are moving in partially known environments have a low availability,
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
All theses offered at MERLIN (November 2017)
") All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
M ous experience and knowledge to aid problem solving
 Adding Memory to the Evolutionary Planner/Navigat or Krzysztof Trojanowski*, Zbigniew Michalewicz"*, Jing Xiao" Abslract-The integration of evolutionary approaches with adaptive memory processes is emerging
Adding Memory to the Evolutionary Planner/Navigat or Krzysztof Trojanowski*, Zbigniew Michalewicz"*, Jing Xiao" Abslract-The integration of evolutionary approaches with adaptive memory processes is emerging
Evolutionary Computation and Machine Intelligence
 Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1
 Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1 Xichen Jiang (in collaboration with J. Zhang, B. J. Harding, J. J. Makela, and A. D. Domínguez-García) Department of Electrical and Computer
Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1 Xichen Jiang (in collaboration with J. Zhang, B. J. Harding, J. J. Makela, and A. D. Domínguez-García) Department of Electrical and Computer
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
4R and 5R Parallel Mechanism Mobile Robots
 4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Optimization of Robot Arm Motion in Human Environment
 Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Graphical Simulation and High-Level Control of Humanoid Robots
 In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
Summary of robot visual servo system
 Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Strategies for Safety in Human Robot Interaction
 Strategies for Safety in Human Robot Interaction D. Kulić E. A. Croft Department of Mechanical Engineering University of British Columbia 2324 Main Mall Vancouver, BC, V6T 1Z4, Canada Abstract This paper
Strategies for Safety in Human Robot Interaction D. Kulić E. A. Croft Department of Mechanical Engineering University of British Columbia 2324 Main Mall Vancouver, BC, V6T 1Z4, Canada Abstract This paper
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion
 : a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
Adaptive Humanoid Robot Arm Motion Generation by Evolved Neural Controllers
 Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
A Posture Control for Two Wheeled Mobile Robots
 Transactions on Control, Automation and Systems Engineering Vol., No. 3, September, A Posture Control for Two Wheeled Mobile Robots Hyun-Sik Shim and Yoon-Gyeoung Sung Abstract In this paper, a posture
Transactions on Control, Automation and Systems Engineering Vol., No. 3, September, A Posture Control for Two Wheeled Mobile Robots Hyun-Sik Shim and Yoon-Gyeoung Sung Abstract In this paper, a posture
Smart Robotic Assistants for Small Volume Manufacturing Tasks
 Smart Robotic Assistants for Small Volume Manufacturing Tasks Satyandra K. Gupta Director, Center for Advanced Manufacturing Smith International Professor Aerospace and Mechanical Engineering Department
Smart Robotic Assistants for Small Volume Manufacturing Tasks Satyandra K. Gupta Director, Center for Advanced Manufacturing Smith International Professor Aerospace and Mechanical Engineering Department
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence
 Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence Antonia Pérez Arias and Uwe D. Hanebeck Abstract This paper presents the control concept of a semimobile haptic interface
Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence Antonia Pérez Arias and Uwe D. Hanebeck Abstract This paper presents the control concept of a semimobile haptic interface
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots
 A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Human-Robot Interaction. Aaron Steinfeld Robotics Institute Carnegie Mellon University
 Human-Robot Interaction Aaron Steinfeld Robotics Institute Carnegie Mellon University Human-Robot Interface Sandstorm, www.redteamracing.org Typical Questions: Why is field robotics hard? Why isn t machine
Human-Robot Interaction Aaron Steinfeld Robotics Institute Carnegie Mellon University Human-Robot Interface Sandstorm, www.redteamracing.org Typical Questions: Why is field robotics hard? Why isn t machine
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
PROG IR 0.95 IR 0.50 IR IR 0.50 IR 0.85 IR O3 : 0/1 = slow/fast (R-motor) O2 : 0/1 = slow/fast (L-motor) AND
 O2 : 0/1 = slow/fast (L-motor) AND") A Hybrid GP/GA Approach for Co-evolving Controllers and Robot Bodies to Achieve Fitness-Specied asks Wei-Po Lee John Hallam Henrik H. Lund Department of Articial Intelligence University of Edinburgh Edinburgh,
A Hybrid GP/GA Approach for Co-evolving Controllers and Robot Bodies to Achieve Fitness-Specied asks Wei-Po Lee John Hallam Henrik H. Lund Department of Articial Intelligence University of Edinburgh Edinburgh,
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Autonomous Localization
 Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
A Numerical Approach to Understanding Oscillator Neural Networks
 A Numerical Approach to Understanding Oscillator Neural Networks Natalie Klein Mentored by Jon Wilkins Networks of coupled oscillators are a form of dynamical network originally inspired by various biological
A Numerical Approach to Understanding Oscillator Neural Networks Natalie Klein Mentored by Jon Wilkins Networks of coupled oscillators are a form of dynamical network originally inspired by various biological
Towards Opportunistic Action Selection in Human-Robot Cooperation
 This work was published in KI 2010: Advances in Artificial Intelligence 33rd Annual German Conference on AI, Karlsruhe, Germany, September 21-24, 2010. Proceedings, Dillmann, R.; Beyerer, J.; Hanebeck,
This work was published in KI 2010: Advances in Artificial Intelligence 33rd Annual German Conference on AI, Karlsruhe, Germany, September 21-24, 2010. Proceedings, Dillmann, R.; Beyerer, J.; Hanebeck,
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Causal Reasoning for Planning and Coordination of Multiple Housekeeping Robots
 Causal Reasoning for Planning and Coordination of Multiple Housekeeping Robots Erdi Aker 1, Ahmetcan Erdogan 2, Esra Erdem 1, and Volkan Patoglu 2 1 Computer Science and Engineering, Faculty of Engineering
Causal Reasoning for Planning and Coordination of Multiple Housekeeping Robots Erdi Aker 1, Ahmetcan Erdogan 2, Esra Erdem 1, and Volkan Patoglu 2 1 Computer Science and Engineering, Faculty of Engineering
Navigation of Transport Mobile Robot in Bionic Assembly System
 Navigation of Transport Mobile obot in Bionic ssembly System leksandar Lazinica Intelligent Manufacturing Systems IFT Karlsplatz 13/311, -1040 Vienna Tel : +43-1-58801-311141 Fax :+43-1-58801-31199 e-mail
Navigation of Transport Mobile obot in Bionic ssembly System leksandar Lazinica Intelligent Manufacturing Systems IFT Karlsplatz 13/311, -1040 Vienna Tel : +43-1-58801-311141 Fax :+43-1-58801-31199 e-mail
A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem
 A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem K.. enthilkumar and K. K. Bharadwaj Abstract - Robot Path Exploration problem or Robot Motion planning problem is one of the famous
A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem K.. enthilkumar and K. K. Bharadwaj Abstract - Robot Path Exploration problem or Robot Motion planning problem is one of the famous
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Learning a Visual Task by Genetic Programming
 Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
USING A FUZZY LOGIC CONTROL SYSTEM FOR AN XPILOT COMBAT AGENT ANDREW HUBLEY AND GARY PARKER
 World Automation Congress 21 TSI Press. USING A FUZZY LOGIC CONTROL SYSTEM FOR AN XPILOT COMBAT AGENT ANDREW HUBLEY AND GARY PARKER Department of Computer Science Connecticut College New London, CT {ahubley,
World Automation Congress 21 TSI Press. USING A FUZZY LOGIC CONTROL SYSTEM FOR AN XPILOT COMBAT AGENT ANDREW HUBLEY AND GARY PARKER Department of Computer Science Connecticut College New London, CT {ahubley,
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Multi-Robot Formation. Dr. Daisy Tang
 Multi-Robot Formation Dr. Daisy Tang Objectives Understand key issues in formationkeeping Understand various formation studied by Balch and Arkin and their pros/cons Understand local vs. global control
Multi-Robot Formation Dr. Daisy Tang Objectives Understand key issues in formationkeeping Understand various formation studied by Balch and Arkin and their pros/cons Understand local vs. global control
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (2 pts) How to avoid obstacles when reproducing a trajectory using a learned DMP?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (2 pts) How to avoid obstacles when reproducing a trajectory using a learned DMP?
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
A Reactive Collision Avoidance Approach for Mobile Robot in Dynamic Environments
 A Reactive Collision Avoidance Approach for Mobile Robot in Dynamic Environments Tang S. H. and C. K. Ang Universiti Putra Malaysia (UPM), Malaysia Email: saihong@eng.upm.edu.my, ack_kit@hotmail.com D.
A Reactive Collision Avoidance Approach for Mobile Robot in Dynamic Environments Tang S. H. and C. K. Ang Universiti Putra Malaysia (UPM), Malaysia Email: saihong@eng.upm.edu.my, ack_kit@hotmail.com D.
Moving Path Planning Forward
 Moving Path Planning Forward Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Abstract. Path planning technologies have rapidly improved over
Moving Path Planning Forward Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Abstract. Path planning technologies have rapidly improved over
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
Smart Grid Reconfiguration Using Genetic Algorithm and NSGA-II
 Smart Grid Reconfiguration Using Genetic Algorithm and NSGA-II 1 * Sangeeta Jagdish Gurjar, 2 Urvish Mewada, 3 * Parita Vinodbhai Desai 1 Department of Electrical Engineering, AIT, Gujarat Technical University,
Smart Grid Reconfiguration Using Genetic Algorithm and NSGA-II 1 * Sangeeta Jagdish Gurjar, 2 Urvish Mewada, 3 * Parita Vinodbhai Desai 1 Department of Electrical Engineering, AIT, Gujarat Technical University,
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run