Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech
|
|
|
- Sibyl Murphy
- 5 years ago
- Views:
Transcription
1 Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe bender using 3-RPSR parallel mechanism with a high orientation capability and experimental investigations Flexure revolute joints with parallel leaf springs Welfare deices for walking assist and rehabilitation Contactless probing system using 3D magnetic tweezer




2 Dept. Mech. Sci. and Eng., Prof. Yukio TAKEDA Assist. Prof. Daisuke MATSUURA {takeda, Field of study: Mechanical Systems Design, Kinematics of Machinery, Machine Element, Human-Machine Interface Kinematic/Dynamic Analysis and Synthesis of Mechanisms Modeling, Simulation and Controls of Mechanical Systems Including Human Development of Machine Elements Pipe bender using parallel mechanism Walking assist machine using crutches Contactless probing system for living cell mechanical property evaluation Establishment of Theory and Simulation Design and Fabrication of High- Performance Machines

")







3 Robot Mechanism (Parallel Mechanisms) Manipulators Machine Tool Positioning Manipulator VR Manipulators Pipe Bender Machine Tool 11 Manipulator in Vacuum


] Flexure Joint with 16 Leaf Springs [Parallel Robots for")
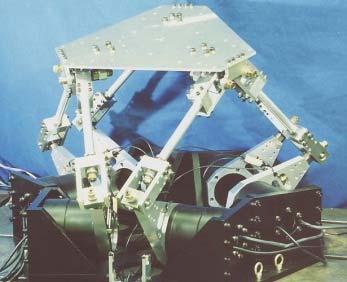
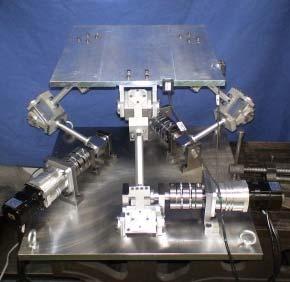
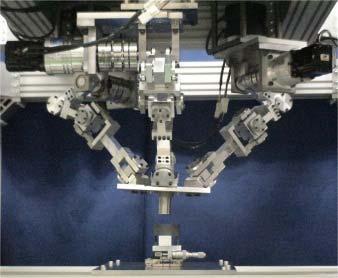
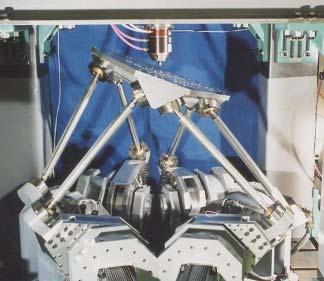
4 Kinematic Design of Parallel Robots with Applications Kinematic Analysis, Structural and Dimensional Synthesis, Performance Evaluation such as Motion Transmissibility, Singularity Analysis, Kinematic Calibration, Machine Elements 6-DOF Mechanisms with 6 Limbs, 6-DOF Mechanisms with 3 Limbs, Position- Orientation Decoupled Mechanisms with 6/5/4/3 DOF, Wire-Driven Mechanisms, Pure Rotational/Translational Mechanisms; Flexure Joints, Rolling/Sliding Spherical Joints Pipe Bending Machine, Motion Simulator, Machine Tool, Positioning Device, Manipulator, Haptic Device Asymmetrical Position-Orientation Decoupled Parallel Mechanism with 5 dof Pipe Bender Using 6-dof Parallel Mechanism [Fabrication of frames of orthoses fitting to each user (taylormade)] Flexure Joint with 16 Leaf Springs [Parallel Robots for Space/Vacuum Environments]





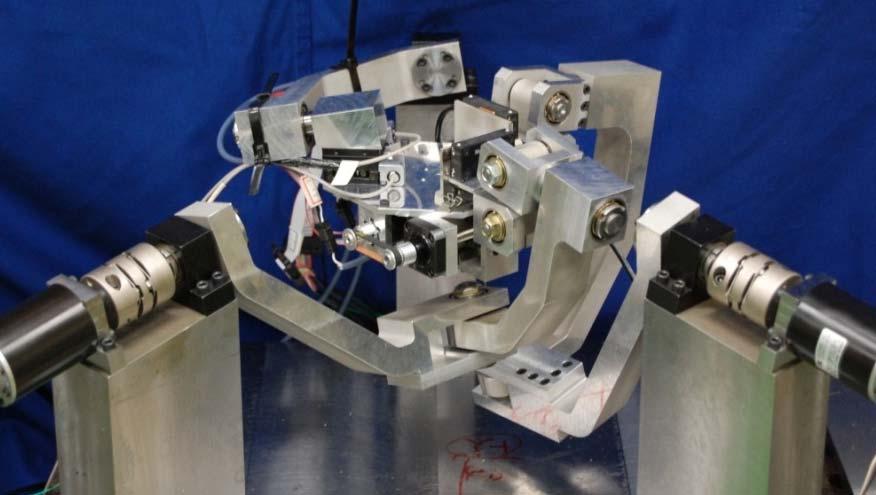
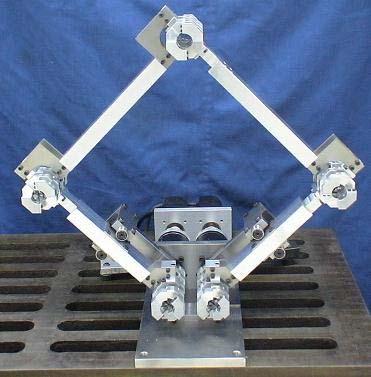
5 Surgery Robot Composed of Asymmetrical Position-Orientation Decoupled Parallel Mechanism and Flexure Joints Mechanism Design, Flexure Joint with Parallel Leaf Springs Structural Synthesis of 2R3T Asymmetrical Decoupled Mechanism with 5 Dof Dimensional Synthesis Taking into Consideration Practical Workspace (Singularity and Motion Range of Joints) Prototyping and Experimental Tests with Applications + Kinematic Structure of 2R3T Parallel Mechanism Flexure Revolute Joint Minimum Invasive Surgery Robot as a Target Application 3D CAD Model Prototype







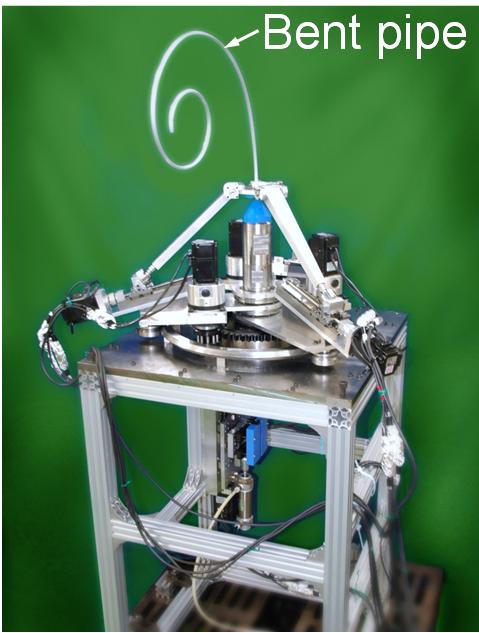
6 Development of Pipe Bender Using Parallel Mechanism Mechanism Design, Modeling of the Mechanical System Including Members with Elastic/Plastic Deformation Requirements to 3-dimensional shaped pipes Objects with a three-dimensional shape obtained by bending a straight pipe with a uniform cross section are being used as components in many applications because they contribute to mass reduction, rigidity improvement, cost reduction, design improvement. handrail in train station For writing For eating Axillary crutch Stick chair Support devices to reduce tremor effect wire puzzle






7 Development of Pipe Bender Using Parallel Mechanism Kinematic Design of Movable-Die Drive Mechanism with High Orientation Capability Design of Continuous Pipe-Feeding Mechanism Using Cam Mechanism Precise Pipe-Bending Based on Feed-Forward Compensation of Effects of d 80 Springback of Pipe and Clearances between Pipe and Dies 推定誤差 e = -1.3% e = 1.3 % 70 Estimated 0.4 curvature 加工後の Experimental Validation 60 半径 R d [mm] bent pipe movable-die drive mechanism movable die fixed die Mechanism Design, Modeling of the Mechanical System Including Members with Elastic/Plastic Deformation θ y [deg] radius straight pipe base pipe feeder Movable-Die Drive Mechanism Using 3-RPSR Parallel Mechanism with High Orientation Capability R g [mm] Estimated Curvature Radius and its Error Obtained with Experiments motion clothoid crutch 3D motion Prototype Bender (3 rd Proto, 2011) bending Pipe-Feeding Mechanism









8 Walking Assist Machines/Devices Walking/Running Machines Walking Chair Walking Assist Machine Using clutches Water Surface Running Machine



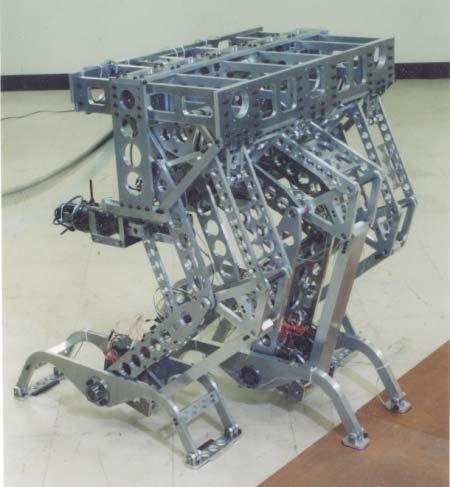
9 Mechanism Design and Control of a Simple and Low-Cost Walking Assist Machine Mechanism Design, Modeling, Simulation and Controls of the Mechanical System Including Human Structural Design of Walking Assist Machine Using Crutches for Paraplegics Structural Design of Walking Assist Machine for Hemiplegics Motion Synthesis Based on Motion Capture Data by Healthy Person Body attachment unit Fabrication of Prototypes and Their Tests p p p g g p Turning unit User Judgment of situation Operation of crutches Controller & Battery Deduction of user s intention Control of actuators Detection of danger Self-contained Harness Exoskeleton Motion generation in accordance with terrain condition and user s intention Judge Think Plan Linear actuator Crutches Ankle drive mechanism Foot plate User-centered design: Utilization of remaining physical and cognitive functions and ability Operation Sensing Visibility and safety: standing posture during locomotion Mobility: Biped locomotion strategy Minimum Cost: Composition of the exoskeleton with minimum number of actuators contributes to mass, energy and cost reduction and simple control algorithm. Basic Concept of Walking Assist Machine Using Crutches for Paraplegics Leg motion generator 1x DC motor 2x Brakes Concept: Low cost Number of actuators:1 or minimum Simplicity Utilization of user s ability (upper limb s strength) Upright posture Daily life assistance 1x DC motor Crutch unit Basic Concept of Walking Assist Machine for Hemiplegics Use of crutches operated by user Parameterized input-motion curve 1 st proto FDM Step-up Step-down small step All





10 Ankle Rehabilitation Device using Spatially Extended Oldham s Mechanism Capable of Adjusting to Change in Joint Axis Mechanism Design, Portable Design Structural Design of Mechanism Based on Oldham s Coupling Mechanism Portable Design for Adjustability Applicable to rehabilitation at home No need of adjustment to each user Easy adjustment of motion range Fault-tolerant configuration and safety with limited motion range determined by link mechanism Oldham Coupling Mechanism Prototype Mechanism Configuration where joint O is actiated and other joints are passive. This mechanism can adapt to change in axis of ankle joint Oa-xayaza without exerting unacceptable load Experimental View

 3D-MT: a mechanical property evaluation equipment for live cell")






11 3D-Magnetic Tweezer and Disaster response manipulator Modeling, Analysis and Design of Mechano-Electromagnetic Systems, Design of Compliant Mechanism (by Assist. Prof. Daisuke MATSUURA) 3D-MT: a mechanical property evaluation equipment for live cell experiments. Contactless probe system capable of several tenth pico-newton force exertion and subnano meter spatial resolution. Variable stiffness manipulator to establish utilization of tactile information together with visual information to identify not only obstacles shape but also their physical property to guarantee proper contact / manipulation. Coil current on each magnetic pole gains magnetomotive force. F Metal particle on/in specimen cell Principle illustration of 3D-Magnetic tweezer Vision-based sensor Is this safe? 乗っても平気?? Visual sensing + Force-Displacement relationship Safe, ここは大丈夫 indeed! Haptic sensing Variable stiffness manipulator for disaster response robots to achieve haptic sensing Mechanical property evaluation Optical image of cytoskeleton External force Angular displacement Torque due to F J 1 Variable stiffness shoulder joint J 2 J 3 External force Trajectory tracking control by prototype 3D-MT Prototype variable stiffness manipulators aiming to achieve high dynamic range of force measurement and output force regulation
A Compliant Five-Bar, 2-Degree-of-Freedom Device with Coil-driven Haptic Control
 2004 ASME Student Mechanism Design Competition A Compliant Five-Bar, 2-Degree-of-Freedom Device with Coil-driven Haptic Control Team Members Felix Huang Audrey Plinta Michael Resciniti Paul Stemniski Brian
2004 ASME Student Mechanism Design Competition A Compliant Five-Bar, 2-Degree-of-Freedom Device with Coil-driven Haptic Control Team Members Felix Huang Audrey Plinta Michael Resciniti Paul Stemniski Brian
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Touching and Walking: Issues in Haptic Interface
 Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Hao, Guangbo; Kong, Xianwen. Article (peer-reviewed)
") Title Author(s) A structure design method for compliant parallel manipulators with actuation isolation Hao, Guangbo; Kong, Xianwen Publication date 2016-11-30 Original citation Type of publication Link
Title Author(s) A structure design method for compliant parallel manipulators with actuation isolation Hao, Guangbo; Kong, Xianwen Publication date 2016-11-30 Original citation Type of publication Link
4R and 5R Parallel Mechanism Mobile Robots
 4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
FORCE LIMITATION WITH AUTOMATIC RETURN MECHANISM FOR RISK REDUCTION OF REHABILITATION ROBOTS. Noriyuki TEJIMA Ritsumeikan University, Kusatsu, Japan
 FORCE LIMITATION WITH AUTOMATIC RETURN MECHANISM FOR RISK REDUCTION OF REHABILITATION ROBOTS Noriyuki TEJIMA Ritsumeikan University, Kusatsu, Japan Abstract In this paper, a new mechanism to reduce the
FORCE LIMITATION WITH AUTOMATIC RETURN MECHANISM FOR RISK REDUCTION OF REHABILITATION ROBOTS Noriyuki TEJIMA Ritsumeikan University, Kusatsu, Japan Abstract In this paper, a new mechanism to reduce the
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Force display using a hybrid haptic device composed of motors and brakes
 Mechatronics 16 (26) 249 257 Force display using a hybrid haptic device composed of motors and brakes Tae-Bum Kwon, Jae-Bok Song * Department of Mechanical Engineering, Korea University, 5, Anam-Dong,
Mechatronics 16 (26) 249 257 Force display using a hybrid haptic device composed of motors and brakes Tae-Bum Kwon, Jae-Bok Song * Department of Mechanical Engineering, Korea University, 5, Anam-Dong,
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Development of Micro-manipulation System for Operation in Scanning Electron Microscope
 Development of Micro-manipulation System for Operation in Scanning Electron Microscope H. Eda, L. Zhou, Y. Yamamoto, T. Ishikawa, T. Kawakami and J. Shimizu System Engineering Department, Ibaraki University,
Development of Micro-manipulation System for Operation in Scanning Electron Microscope H. Eda, L. Zhou, Y. Yamamoto, T. Ishikawa, T. Kawakami and J. Shimizu System Engineering Department, Ibaraki University,
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Pr Yl. Rl Pl. 200mm mm. 400mm. 70mm. 120mm
 Humanoid Robot Mechanisms for Responsive Mobility M.OKADA 1, T.SHINOHARA 1, T.GOTOH 1, S.BAN 1 and Y.NAKAMURA 12 1 Dept. of Mechano-Informatics, Univ. of Tokyo., 7-3-1 Hongo Bunkyo-ku Tokyo, 113-8656 Japan
Humanoid Robot Mechanisms for Responsive Mobility M.OKADA 1, T.SHINOHARA 1, T.GOTOH 1, S.BAN 1 and Y.NAKAMURA 12 1 Dept. of Mechano-Informatics, Univ. of Tokyo., 7-3-1 Hongo Bunkyo-ku Tokyo, 113-8656 Japan
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Mekanisme Robot - 3 SKS (Robot Mechanism)
") Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Control Architecture and Algorithms of the Anthropomorphic Biped Robot Bip2000
 Control Architecture and Algorithms of the Anthropomorphic Biped Robot Bip2000 Christine Azevedo and the BIP team INRIA - 655 Avenue de l Europe 38330 Montbonnot, France ABSTRACT INRIA [1] and LMS [2]
Control Architecture and Algorithms of the Anthropomorphic Biped Robot Bip2000 Christine Azevedo and the BIP team INRIA - 655 Avenue de l Europe 38330 Montbonnot, France ABSTRACT INRIA [1] and LMS [2]
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
WALKING ROBOT LOCOMOTION SYSTEM CONCEPTION
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 3, pp. 21 30 WALKING ROBOT LOCOMOTION SYSTEM CONCEPTION D. Ignatova, E. Abadjieva, V. Abadjiev, Al. Vatzkitchev Institute of Mechanics,
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 3, pp. 21 30 WALKING ROBOT LOCOMOTION SYSTEM CONCEPTION D. Ignatova, E. Abadjieva, V. Abadjiev, Al. Vatzkitchev Institute of Mechanics,
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
XTS: Significantly higher performance and simplified engineering with TwinCAT. products PC Control
 products PC Control 04 2012 Position calculation Velocity calculation Position control Velocity control Phase transformation Position sensor signals Complete lt control cycle for all movers in 250 μs Set
products PC Control 04 2012 Position calculation Velocity calculation Position control Velocity control Phase transformation Position sensor signals Complete lt control cycle for all movers in 250 μs Set
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION WHEEL
 IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Development of Running Robot Based on Charge Coupled Device
 Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Nonholonomic Haptic Display
 Nonholonomic Haptic Display J. Edward Colgate Michael A. Peshkin Witaya Wannasuphoprasit Department of Mechanical Engineering Northwestern University Evanston, IL 60208-3111 Abstract Conventional approaches
Nonholonomic Haptic Display J. Edward Colgate Michael A. Peshkin Witaya Wannasuphoprasit Department of Mechanical Engineering Northwestern University Evanston, IL 60208-3111 Abstract Conventional approaches
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
Principles of Rotary Bending Technology & Use of Rotary Bending Technology for Processing of Advanced, High-Strength Steels (AHSS)
") Principles of Rotary Bending Technology & Use of Rotary Bending Technology for Processing of Advanced, High-Strength Steels (AHSS) L. Ray Osborne rosborne@anchordanly.com Mechanical Engineer / Business
Principles of Rotary Bending Technology & Use of Rotary Bending Technology for Processing of Advanced, High-Strength Steels (AHSS) L. Ray Osborne rosborne@anchordanly.com Mechanical Engineer / Business
Design of Quadruped Walking Robot with Spherical Shell
 2014 American Transactions on Engineering & Applied Sciences. American Transactions on Engineering & Applied Sciences http://tuengr.com/ateas Design of Quadruped Walking Robot with Spherical Shell Takeshi
2014 American Transactions on Engineering & Applied Sciences. American Transactions on Engineering & Applied Sciences http://tuengr.com/ateas Design of Quadruped Walking Robot with Spherical Shell Takeshi
Designing Better Industrial Robots with Adams Multibody Simulation Software
 Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Design and Manufacture of 8.4 m Primary Mirror Segments and Supports for the GMT
 Design and Manufacture of 8.4 m Primary Mirror Segments and Supports for the GMT Introduction The primary mirror for the Giant Magellan telescope is made up an 8.4 meter symmetric central segment surrounded
Design and Manufacture of 8.4 m Primary Mirror Segments and Supports for the GMT Introduction The primary mirror for the Giant Magellan telescope is made up an 8.4 meter symmetric central segment surrounded
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING
 THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
Summer Engineering Research Internship for US Students (SERIUS) Department of Biomedical Engineering. (www.bioeng.nus.edu.
 Department of Biomedical Engineering. (www.bioeng.nus.edu.") Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Design and Implementation of a Simplified Humanoid Robot with 8 DOF
 Design and Implementation of a Simplified Humanoid Robot with 8 DOF Hari Krishnan R & Vallikannu A. L Department of Electronics and Communication Engineering, Hindustan Institute of Technology and Science,
Design and Implementation of a Simplified Humanoid Robot with 8 DOF Hari Krishnan R & Vallikannu A. L Department of Electronics and Communication Engineering, Hindustan Institute of Technology and Science,
Mechatronic Design, Fabrication and Analysis of a Small-Size Humanoid Robot Parinat
 Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
Research Article International Journal of Current Engineering and Technology ISSN 2277-4106 2014 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Mechatronic Design, Fabrication
Optimization of Robot Arm Motion in Human Environment
 Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
PRECISION POSITIONING DOWN TO SINGLE NANOMETRES BASED ON MICRO HARMONIC DRIVE SYSTEMS
 PRECISION POSITIONING DOWN TO SINGLE NANOMETRES BASED ON MICRO HARMONIC DRIVE SYSTEMS Andreas Staiger and Reinhard Degen Micromotion GmbH, An der Fahrt 13, 55124 Mainz, Germany info@micromotion-gmbh.de
PRECISION POSITIONING DOWN TO SINGLE NANOMETRES BASED ON MICRO HARMONIC DRIVE SYSTEMS Andreas Staiger and Reinhard Degen Micromotion GmbH, An der Fahrt 13, 55124 Mainz, Germany info@micromotion-gmbh.de
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Robotics. In Textile Industry: Global Scenario
 Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
TREE CLIMBING ROBOT (TREEBOT)
") 9 JEST-M, Vol 4, Issue 4, Jan-2015 TREE CLIMBING ROBOT (TREEBOT) Electronics and Communication department, MVJ College of Engineering srivatsa12ster@gmail.com, vinoop.u@gmail.com, satish.mvjce@gmail.com,
9 JEST-M, Vol 4, Issue 4, Jan-2015 TREE CLIMBING ROBOT (TREEBOT) Electronics and Communication department, MVJ College of Engineering srivatsa12ster@gmail.com, vinoop.u@gmail.com, satish.mvjce@gmail.com,
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation
 Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
arxiv: v1 [cs.ro] 22 Apr 2016
![arxiv: v1 [cs.ro] 22 Apr 2016](/thumbs/86/93666401.jpg "arxiv: v1 [cs.ro] 22 Apr 2016") Validation of computer simulations of the HyQ robot arxiv:164.6818v1 [cs.ro] 22 Apr 216 Dynamic Legged Systems lab Technical Report 1 DLS-TR-1 Version 1. Marco Frigerio, Victor Barasuol, Michele Focchi
Validation of computer simulations of the HyQ robot arxiv:164.6818v1 [cs.ro] 22 Apr 216 Dynamic Legged Systems lab Technical Report 1 DLS-TR-1 Version 1. Marco Frigerio, Victor Barasuol, Michele Focchi
Haptic Discrimination of Perturbing Fields and Object Boundaries
 Haptic Discrimination of Perturbing Fields and Object Boundaries Vikram S. Chib Sensory Motor Performance Program, Laboratory for Intelligent Mechanical Systems, Biomedical Engineering, Northwestern Univ.
Haptic Discrimination of Perturbing Fields and Object Boundaries Vikram S. Chib Sensory Motor Performance Program, Laboratory for Intelligent Mechanical Systems, Biomedical Engineering, Northwestern Univ.
Positioning Control System of a 3-Dimensional Ultrasonic Motor with Spherical Rotor
 Second LACCEI International Latin American and Caribbean Conference for Engineering and Technology (LACCEI 2004) Challenges and Opportunities for Engineering Education, Research and Development 2-4 June
Second LACCEI International Latin American and Caribbean Conference for Engineering and Technology (LACCEI 2004) Challenges and Opportunities for Engineering Education, Research and Development 2-4 June
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Robotics and Artificial Intelligence. Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp
 Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Special Patterns - Introduction. -Manufacture of large things -Technology Provider
 Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
A Novel Coil Configuration to Extend the Motion Range of Lorentz Force Magnetic Levitation Devices for Haptic Interaction
 A Novel Coil Configuration to Extend the Motion Range of Lorentz Force Magnetic Levitation Devices for Haptic Interaction Peter Berkelman Abstract Lorentz force magnetic levitation devices have been used
A Novel Coil Configuration to Extend the Motion Range of Lorentz Force Magnetic Levitation Devices for Haptic Interaction Peter Berkelman Abstract Lorentz force magnetic levitation devices have been used
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Challenges of Precision Assembly with a Miniaturized Robot
 Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Medical Robotics LBR Med
 Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Table saws are not recommended for cutting sheets larger than 4'X4' I size.
 Aluminum Composite Panel (Fabrication) Considerable care should be taken in the layout and handling of Aluminum Composite Panel. The use if coolants or lubricants are not required when sawing. A. Sawing
Aluminum Composite Panel (Fabrication) Considerable care should be taken in the layout and handling of Aluminum Composite Panel. The use if coolants or lubricants are not required when sawing. A. Sawing
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Sustainable & Intelligent Robotics Group Projects
 Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Press Operations & Types of Dies
 Press Operations & Types of Dies Press Working Use of mechanical and hydraulic presses for forging and extrusion has been mentioned earlier. Knuckle type mechanical presses are used widely for sheet metal
Press Operations & Types of Dies Press Working Use of mechanical and hydraulic presses for forging and extrusion has been mentioned earlier. Knuckle type mechanical presses are used widely for sheet metal
Structure Design of a Feeding Assistant Robot
 Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
A Hybrid Actuation Approach for Haptic Devices
 A Hybrid Actuation Approach for Haptic Devices François Conti conti@ai.stanford.edu Oussama Khatib ok@ai.stanford.edu Charles Baur charles.baur@epfl.ch Robotics Laboratory Computer Science Department Stanford
A Hybrid Actuation Approach for Haptic Devices François Conti conti@ai.stanford.edu Oussama Khatib ok@ai.stanford.edu Charles Baur charles.baur@epfl.ch Robotics Laboratory Computer Science Department Stanford
COMPARISON BETWEEN CONVENTIONAL MILLING AND CLIMB MILLING IN ROBOTIC DEBURRING OF PLASTIC PARTS
 Proceedings in Manufacturing Systems, Volume 11, Issue 3, 2016, 165 170 ISSN 2067-9238 COMPARISON BETWEEN CONVENTIONAL MILLING AND CLIMB MILLING IN ROBOTIC DEBURRING OF PLASTIC PARTS Andrei Mario IVAN
Proceedings in Manufacturing Systems, Volume 11, Issue 3, 2016, 165 170 ISSN 2067-9238 COMPARISON BETWEEN CONVENTIONAL MILLING AND CLIMB MILLING IN ROBOTIC DEBURRING OF PLASTIC PARTS Andrei Mario IVAN
DEVELOPMENT OF A BIPED ROBOT
 Joan Batlle, Enric Hospital, Jeroni Salellas and Marc Carreras Institut d Informàtica i Aplicacions Universitat de Girona Avda. Lluis Santaló s/n 173 Girona tel: 34.972.41.84.74 email: jbatlle, ehospit,
Joan Batlle, Enric Hospital, Jeroni Salellas and Marc Carreras Institut d Informàtica i Aplicacions Universitat de Girona Avda. Lluis Santaló s/n 173 Girona tel: 34.972.41.84.74 email: jbatlle, ehospit,
Development of Shape-Variable Hand Unit for Quadruped Tracked Mobile Robot
 Development of Shape-Variable Hand Unit for Quadruped Tracked Mobile Robot Toyomi Fujita Department of Electrical and Electronic Engineering, Tohoku Institute of Technology 35-1 Yagiyama Kasumi-cho, Taihaku-ku,
Development of Shape-Variable Hand Unit for Quadruped Tracked Mobile Robot Toyomi Fujita Department of Electrical and Electronic Engineering, Tohoku Institute of Technology 35-1 Yagiyama Kasumi-cho, Taihaku-ku,
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis